
模型预测控制在轨道交通虚拟耦合列控系统中的应用
2021-11-19 07:30张小林
城市轨道交通研究 2021年10期
张小林 赵 磊
(上海富欣智能交通控制有限公司,201203,上海∥第一作者,高级工程师)
随着人们出行需求的提高以及城市群的兴起,如何提高轨道交通线路通过能力已成为需要解决的问题。在不改变线路和增加车辆配置的基础上,通过研究和部署新型列控系统以提高运输能力已成为解决这一问题的重要手段。
随着自动驾驶、物联网以及5G通信等技术的发展,近年来对于虚拟耦合列控技术[1-2]的研究成为热点。不同于既有列控系统,虚拟耦合列控系统借助车-车间的直接通信,不再将前行列车视为静止,而是将同一方向上前后多列车虚拟耦合成1列列车进行协同控制,从而达到缩短运行间隔、提高线路通过能力的目的。
本文将在介绍虚拟耦合列控技术基础上,对协同编组这一关键实现技术进行分析及建模仿真。
1 虚拟耦合列控系统
虚拟耦合列控系统(见图1)借助先进的无线通信、传感和控制等技术,从地面获得轨旁设备状态及控制指令,并基于车间通信从相邻列车获得列车位置、速度、加速度等关键信息,形成输入信息协同控制相邻列车间的运行速度和间隔距离,形成1个稳定车队整体在统一的移动授权防护下运行,共同完成列车控制与调度组织。列车的间隔距离不再是基于前车静止而是基于两车相对速度和位置,可实现更高效率的基于相对速度的列车控制。

图1 虚拟耦合列控系统简图Fig.1 Schematic diagram of virtual coupling train control system
相较于现有列控技术,虚拟耦合列控系统的关键优势在于多列列车之间的虚拟编组和协同控制,因此应重点研究相关协同控制理论和技术方法。该理论和技术方法的研究成为了新型列控系统能否取得实际运用的关键因素。
2 多智能体协同编组技术
将单列列车视为智能体,多列列车的系统编组实际上是1个多智能体(MAS)系统控制编组[3]问题。MAS的编组控制是指在选取合适的控制策略的前提下,统一协调控制MAS中各个智能体的运动,使有多个同类或者相似智能体组成的系统从任意初始条件出发,都能够达到预期相对位置,并能够维持系统队形不变,同时沟通合作,以完成特定任务的控制过程。
目前,队形控制已广泛在航天器群体、机器人群体[4]、GPS(全球定位系统)车队及舰队等的协同作业中。用于MAS编队控制的主要控制方法有基于行为的控制方法、基于虚拟结构的控制方法、领导者-追随者控制方法、模型预测控制(MPC)方法,以及基于广义坐标的控制方法等。其中,MPC方法[5-6]因建模简单、控制灵活、具有在线优化能力,以及鲁棒性强等特点得到了广泛应用。本文将基于MPC方法对列车虚拟编组和系统控制进行建模和仿真。
3 MPC建模
3.1 MPC原理
作为一种控制方法,MPC法主要包含预测模型、滚动优化和反馈校正3个基本要素,分别对应利用空间状态方程预测系统未来状态、基于目标函数在线求解优化、将求解的最优值作用于系统控制这3个过程。MPC法的作用机理可描述为:在每个采样时刻,根据获得的当前信息,在线求解1个有限时间优化问题,并将得到的控制序列的第1个元素作用于被控对象;在下个采样时刻,重复上述过程,用新的测量值作为此时预测系统未来动态的初始条件,重新求解。
3.2 列车纵向运动学模型
列车的纵向运动过程可由以下微分方程描述:

式中:
s——列车相对于参考点的纵向距离;
v——列车的速度;
a——列车的加速度。

式中:
c——控制输入;
f(v,a)——列车阻力方程;
b(v)——列车牵引、制动控制输入滞后方程。
式(2)可用以下列车加速度方程描述:

式中:
ades——列车控制器所决定的期望加速度;
τ——时间常数。式(3)表明,列车加速和减速控制特性可用一阶滞后建模,即实际加速度a以τ跟踪ades。
3.3 状态空间模型
考虑同一轨道上有多列列车运行,基于协同控制的列车跟踪示意图如图2所示。

图2 基于协同控制的列车跟踪示意图Fig.2 Schematic diagram of train tracking effect based on MPC
图2中,es计算如下:
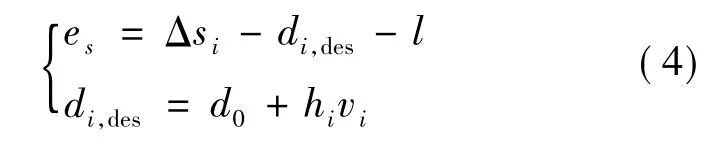
式中:
d0——静止时列车间最小安全距离;
hi——常数。
此外,定义前、后列车的速度差为:

根据式(2)、式(4)—式(7),可以推导出列车状态空间模型为:

其中:

式中:
x、u、ω——分别为状态矢量、控制输入及干扰。
在此模型中将前车加速度视为干扰。
3.4 离散化和模型预测
根据以上状态空间模型,进行离散化可得:

式中:
x(k)——第k周期系统状态向量;
y(k)——系统输出;
u(k)——系统控制输入;
ω(k)——前车加速度;
C——输出矩阵。
若T为系统周期,I为单位矩阵,则:


则增量控制形式的模型预测状态方程为:

其中:
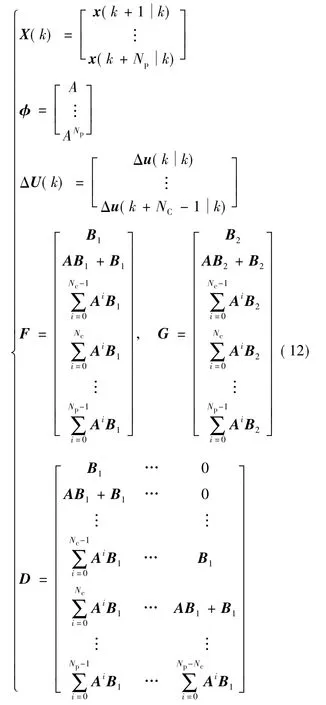
式(12)中,Np为预测时域,Nc为控制时域,并应满足Nc≤Np。
则k时刻的预测控制输出为:

3.5 控制优化
首先,定义性能指标函数:
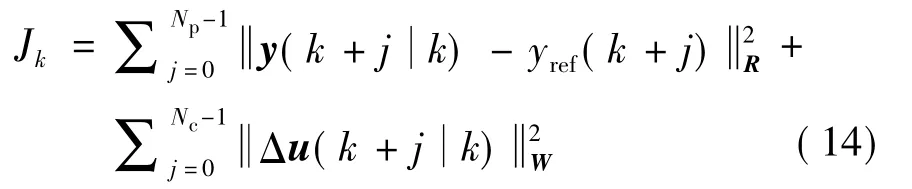
式中:
yref——参考值;
R——误差加权矩阵;
W——输入加权矩阵。
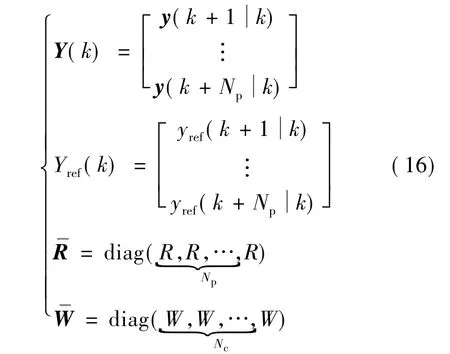
可以向量形式将式(14)表示为:

式中:
定义向量E(k)为系统自由响应与未来目标参考值的偏差,则:

其中:

将式(17)代入式(15)可得:

其中:

式(19)可被写为二次规划的标准形式:

其中:

由于Δu(k)是极小化性能指标得到的解,则必须满足极值必要条件:

根据式(2)可得ΔU(k)的解为:

至此,以Δu(k)作为k时刻的增量控制输入即可。
4 MPC仿真
为验证MPC的有效性,模拟3列列车跟踪运行,第1列列车(头车)加速度以一定周期进行上下波动。通过仿真来观察第2列和第3列列车追踪头车的运行情况。模拟软件采用Python语言编程,T为100 ms,Np和Nc分别为10和6,τ和hi均为1。图3为3列列车仿真速度曲线图。
根据图3,第2列列车和第3列列车的初始速度均为10 m/s,在非稳态时,第2列列车和第3列列车根据与第1列列车的速度差和距离差进行快速调整;在进入稳态后,跟随第1列列车速度进行速度调整。从图3的局部放大图可以看出,在第1列列车速度周期性变化阶段,第2列列车和第3列列车可以快速进行速度调整,并跟踪前车速度变化达到稳定运行状态。

图3 基于MPC的列车跟踪效果仿真速度曲线图Fig.3 Simulation speed curve of train tracking effect based on MPC
图4为3列列车追踪运行位置间隔仿真图。由图4可以看到,3列列车按照等间隔运行,间隔距离保持不变;在第1列列车速度周期性变化时,后车可以很好地跟踪前车并保持恒定间距。

图4 基于MPC的3列列车跟踪运行位置间隔仿真图Fig.4 Simulation diagram of position interval of threevehicle tracking running based on MPC
5 结语
本文根据一种基于MPC理论的协同算法,将其应用到虚拟耦合列控系统协同编组追踪运行场景中。利用Python语言编写MPC,对3列列车跟踪进行模拟仿真,头车速度在一定频率周期性变化条件下,后车能追踪前车并保持与前车一定的间距;后车速度跟随前车速度变化,与前车速度保持一致,可保持队形的稳定。根据以上模拟仿真,本算法可以很好地应用到轨道交通列车追踪运行场景中,可有效解决在其他列车投入运行或有列车退出运行后,使列车车队处于不稳定态时,能迅速进入等间隔、同速度的运行稳定态问题。
后续研究将会考虑列车运行性能和线路运行条件等因素对本方法的影响,优化该方法以便更符合轨道交通列控系统的复杂要求。
猜你喜欢
家庭影院技术(2021年3期)2021-05-21
数学小灵通(1-2年级)(2020年11期)2020-12-28
铁道通信信号(2020年5期)2020-09-21
铁道通信信号(2020年10期)2020-02-07
小学生学习指导(低年级)(2019年3期)2019-04-22
厦门理工学院学报(2016年1期)2016-12-01
铁道通信信号(2016年10期)2016-06-01
读写算·小学低年级(2014年4期)2014-07-24
铁路通信信号工程技术(2014年5期)2014-02-28
铁路通信信号工程技术(2014年1期)2014-02-28
