ARMA模型在锚碇基坑变形预测中的应用*
2021-11-25 01:51鲍燕妮沈丹祎石振明
工程地质学报 2021年5期
鲍燕妮 沈丹祎 石振明 朱 艳④ 彭 铭
(①同济大学建筑设计研究院(集团)有限公司, 上海 200092, 中国)
(②同济大学地下建筑与工程系, 上海 200092, 中国)
(③同济大学岩土及地下工程教育部重点实验室, 上海 200092, 中国)
(④中船第九设计研究院工程有限公司, 上海市海洋工程和船厂水工特种工程技术研究中心, 上海 200090, 中国)
0 引 言
近年来,我国国民经济快速发展,基础工程建设迎来新的热潮,桥梁建设也逐渐向大跨度发展。悬索桥是跨径在600m以上桥梁的首选(徐江等, 2018),而锚碇基坑作为悬索桥的地基基础,确保其设计与施工符合要求,保障基坑稳定性是确保桥梁安全运营的关键。因此,在锚碇基坑施工期开展监测研究,了解基坑变形及稳定性的变化趋势是十分必要的。
目前,国内外很多学者开展了关于地表变形的监测预测研究。张冬晓(2005)基于选用灰色系统GM(1, 1)模型,建立了考虑建筑基坑施工过程中变形监测数据的预测预报系统,并在此基础上,提出了建筑基坑动态设计施工技术。赵燕容(2006)基于小波技术改进,提出了采用时间序列分析方法分析润扬长江公路大桥南汊悬索桥南锚碇基坑施工过程监测数据,提出了施工优化方法。何振华(2013)以珠江新城站为例,通过分析施工过程中基坑边坡及周围建筑物变形监测结果,论证了基坑施工方案的有效性。雷国光等(2015)基于FLAC3D建立了基坑开挖支护过程的三维动态计算模型,研究了基坑施工过程中的坑底隆起、地表沉降、基坑外土体变形以及围护墙变形等基本特征。孙世国等(2016)采用ARMA时间序列法和GM(1, 1)灰色理论分析了某矿边坡水平位移,发现组合预测法提高了较长预测步长的预测精度。王凯等(2018)以武汉唐家墩地铁站基坑为例,利用时间序列ARMA模型对基坑沉降变形进行预测,并对比分析了预测值与实际值。叶帅华等(2019)对兰州市某复杂环境下深大基坑工程施工过程中基坑周围土体、支护结构、邻近建筑监测数据进行分析,研究了基坑开挖过程中基坑变形性状和基坑开挖对邻近建筑的影响。杨帆等(2019)提出了基于时间序列的人工蜂群算法和支持向量回归机相结合的滑坡位移预测方法,发现该方法在三峡库区白水河滑坡位移监测应用中具有更高的精度。董公何等(2020)以浙江省嘉兴市某区某地块居民楼项目的基坑沉降为例,采用时间序列法预测了该基坑变形趋势,发现该方法在可利用数据质量可靠、重复观测频率较高时对监测目标沉降趋势的预推结果精度更高。丁戈媛(2020)采用差分整合自回归移动平均模型预测了朱家店滑坡位移,发现通过剔除离群值可以更好地预测牵引式滑坡的位移。
目前关于基坑变形及稳定性的监测研究,大多通过分析不同类型基坑在施工过程中的地表、临近建筑物等的变形规律,进而根据监测数据分析结果指导具体工程实践,较少有研究对基坑在施工过程中的变形趋势进行预测。此外,在大型工程项目周围往往环绕了各种重要的构(建)筑物,若由于基坑变形过大,且未及时控制,则可能造成基坑失稳,周围建(构)筑物倾斜开裂等严重后果。因此,本文在已有研究的基础上,应用时间序列模型对新田长江大桥北岸锚碇基坑的基坑边坡及危岩裂缝进行监测预报,并将监测结果与预测结果进行对比分析,分析结果可以为基坑变形及基坑施工对周围建(构)筑物的影响提供预警依据,为相关工程建设提供一定的指导。
1 数值研究方法
1.1 时间序列分析基本理论
时间序列是指在生产和科学研究等过程中,观察某一现象随时间变化过程,并对观察值按照时间先后顺序进行排列,它是某个变量或多个变量在不同时刻上所形成的随机数据,反映了现象的发展变化规律(钱建国等, 2017)。时间序列预测可以通过建立已有事件随时间动态变化的模型对该事件未来的变化行为进行预测(何书元, 2003)。时间序列预测的方法包括样本内预测与样本外预测、动态预测与静态预测、滚动预测与累进预测等。
在采用时间序列进行预测中,主要包括以下基本步骤:
(1)时序数据预处理。在预测前应先进行数据预处理,包括奇异值处理、等时距处理等。数据预处理的方法很多,应结合实际情况进行选择,常用的有经验法、归一化法、降维法、浮动搜索法、相空间重构法、遗传算法(GA)等。
(2)确定预测方法参数。不同时间序列预测方法都涉及一些重要参数,这些参数基本决定了所建立的预测模型的效果和精度。因此,预测方法的参数确定和优化极其重要,常用的参数优化方法有试算法、智能优化算法等。
(3)建立预测模型。确定预测方法所需要的重要参数后,将预测方法与训练样本数据结合,进而建立预测模型,并针对测试样本进行预测。
(4)预测精度评价。获得预测结果后,需对其进行误差分析,进而验证方法和模型的准确性。现有的评价指标主要包括相对误差(RE)、均方根相对误差(RMSE)和平均绝对百分比误差(MAPE),表达式分别如下:
(1)
(2)
(3)

1.2 自回归滑动平均模型(ARMA)
自回归滑动平均模型是目前应用最广的线性平稳时间序列预测模型,可将其细分为AR模型、MA模型、ARMA模型和ARIMA模型(Peng et al., 2013a,2013b)。ARMA模型的优势是可以通过利用过去值、当期值以及滞后随机扰动项的加权建模,进而解释并且预测时间序列的变化发展规律(王晨博等, 2021)。
在ARMA模型中,与时间相关的变量xi可以表示为:
xi=φ0+φ1xt-1+…φpxt-p+
εt-θ1εt-1-…θqεt-q
(4)

ARMA模型建立的前提条件是平稳性假设。因此,在建立预测模型之前,首先要对时间序列进行平稳性检验。如果为非平稳时间序列,则需要采用差分运算先使模型数据平稳化。差分方程Δxt可以定义为:
Δxt=xt-xt-1
(5)
Δdxt=Δd-1xt-Δdxt-1
(6)
xt可以通过差分方程转移到一个平稳时间序列ωt,即:
ωt=Δdxt=φ1ωt-1+φ2ωt-2…+φpωt-p+
εt-θ1εt-1-…θqεt-q
(7)
式中:xt为自回归综合移动平均线时间序列(ARIMA(p,d,q)),当d=0时,即为ARMA(p,q),其计算公式如式(4)所示。
当q=0时,即为自回归模型(AR(p)):
xt=φ1xt-1+φ2xt-2+…+φpxt-p+εt
(8)
当p=0时,即为移动平均模型(MA(q)):
xt=εt-θ1εt-1-θ2εt-2-…θqεt-q
(9)
1.3 ARMA模型识别
ARMA模型的识别主要是针对时间序列的相关性进行分析,具体表现为自相关函数(ACF)和偏相关函数(PACF)。
自相关函数(ACF)定义如下:
(10)

ARMA模型的另一个重要特征——偏自相关函数(PACF)的定义如下:
(11)

设序列的自相关函数为ρ1,ρ2,Λ,ρq,Λ,ρk,Λ,如果k>q后,恒有ρk=0,称之为“截尾”性; 如果不论k值如何,都有ρk为非零值,且逐渐衰减,称之为“拖尾”性。基于“截尾”性和“拖尾”性,可以根据以下3条原则进行模型识别和判断:
(1)如果ACF存在“拖尾”现象,而PACF在p阶后出现“截尾”现象,则可以确定为自回归模型AR(p)。
(2)如果ACF在q阶后出现“截尾”现象,而PACF存在“拖尾”现象,则可以确定为滑动平均模型MA(q)。
(3)若ACF和PACF都呈现“拖尾”现象,且分别在p阶和q阶后开始逐渐趋于零,则可以确定是自回归滑动平均模型ARMA(p,q)。
1.4 ARMA模型参数估计和模型定阶
ARMA建模的含义包括两个方面:一是参数数量的确定,二是各参数的取值,分别称之为模型的定阶和参数估计。
ARMA(p,q)时间序列模型,如式(4)所示,有(p+q+1)个参数,即φ1,…φp,θ1,…θq和σa。模型估计的目标是找到合适的参数来拟合时间序列的观测值,ARMA(p,q)时间序列在t时刻的误差表示为:
εt=xt-φ1xt-1-φ2xt-2-…φqxt-p+
θ1εt-1-θ2εt-2+…+θqεt-q
(12)
采用最小二乘法使得参数φi和θi实现最少的εt平方的总和:
(13)
在获得参数后,下一步是进行模型诊断检查,以确保假定的模型是合适的:
(14)
2 数值试验
2.1 工程概况
本研究所选取工程案例新田长江大桥是恩广高速的重庆新田至高峰段的重要工程之一,其位于万州主城区的上游(图1)。新田长江大桥长度达1.7km,主桥为双塔单跨钢箱梁悬索桥,北塔柱上游侧高177.5m,下游侧高161.5m,南塔柱高均为177.5m,主塔单肢塔柱基础采用18m×18m的矩形承台,下设9根直径3m的灌注桩,两岸都采用重力式锚碇。

图1 新田长江大桥地理位置图
其中:北岸(高峰岸)的锚碇区位于斜坡的中部区域,地面高程约在210~250m,坑底设计的高程为198m。基坑底面面积为1026m2,边坡面积为5633m2,锚碇基坑开挖总方量110400m3(图2)。锚碇区基坑开挖,边坡高度为12.0~52.0m,边坡岩土体主要为泥岩和砂岩,上部覆盖少量的块石土。基坑边坡最大坡度为1︰0.3,最小坡度为1︰1,最高处边坡有6级,最低处为1级,单级边坡高度为8m和10m两种。

图2 锚碇基坑平面图
根据现场勘察发现,高峰岸发育有一处危岩带(图3),估算体积约50m3,危岩宽约5.0m,高10.0m,均厚约1.0m,其形态主要为块状,其崩落主方向为230°,坡角87°,崩塌后将直接威胁下部锚碇区。

图3 危岩体现场照片
2.2 现场监测概况
为及时了解北岸(高峰岸)锚碇基坑开挖支护施工过程中的变形情况,现场监测点布置如下:
(1)在围护结构周边中部、拐点处应布置锚碇基坑位移监测点,如图4所示。

图4 锚碇基坑监测点布设示意图
(2)在陡崖顶部建立危岩裂缝监测点。
(3)在围护结构周边中部、阳角处应布置高边坡位移监测点,如图5所示。

图5 边坡监测点布设示意图
3 ARMA模型预测分析
结合该锚碇基坑监测过程,监测过程持续约4个月,约每天进行基坑位移、危岩裂缝和高边坡位移测量。根据工程监测数据资料,分别提取基坑位移JKWY-04测点和危岩裂缝的监测数据进行基于时间序列的预测分析。
3.1 基坑位移监测结果分析
3.1.1 建模预测过程
选取X、Y、Z3个方向的位移进行时间序列预测分析。测点JKWY-04的前期监测时间从2019年8月14日至2019年10月3日, 2019年10月6日至2019年12月10日。一般而言,时间序列预测法要求其所采用的数据间隔时间相等。本文监测时间在中间有所缺失,故采用选择分段线性插值的方法进行等时距处理,增加2019年10月4日、5日数据,使得实测数据的采取间隔时间一致。图6、图7展示了测点实际监测获得的变形曲线和插值后的变形曲线。

图6 实测变形曲线

图7 插值变形曲线
此外,在同一桩锚基坑工程的施工过程中,由于基坑变形影响因素基本一致,因此前后开挖工况或支护工况具有相似的变形规律和特征。本项目充分利用这一特点,在基坑变形时间序列预测过程中利用前期工况的实测变形数据建模预测后期工况变形量。
测点JKWY-04的变形预测思路如下:首先利用2019年8月14日至2019年12月6日的实测数据建模拟合,验证模型准确性; 然后利用2019年8月14~2019年12月10日的实测数据建模外推预测12月11日~12月14日的变形数据。
3.1.2 预测分析
3.1.2.1 相关分析
相关分析主要是通过计算所得到观察值序列的ACF与PACF,根据两者函数图像表现出的“拖尾”或“截尾”的特点,判断最终采用哪一种具体形式进行模型建立。
由图8、图9可以看出,X、Z方向累计位移ACF和PACF均呈现出“拖尾”特点,且没有较明显的截尾变化,可以初步判定模型形式为自回归积分滑动平均模型。
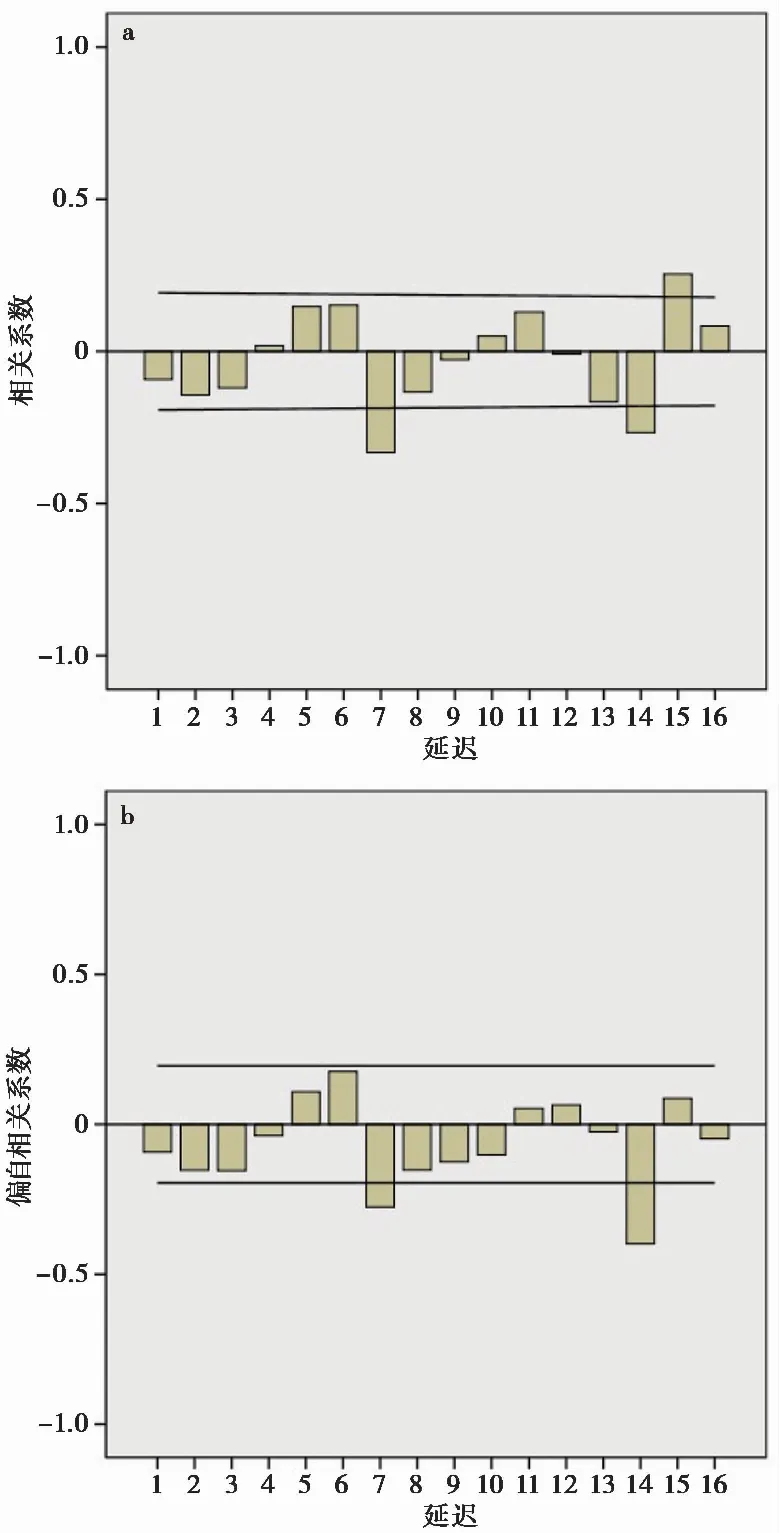
图8 X方向累计位移相关性分析结果

图9 Z方向累计位移相关性分析结果
由图10可以看出,Y方向累计位移ACF表现为明显的“截尾”现象,而PACF表现为“拖尾”变化,没有较明显的截尾变化,可以初步判定模型为滑动平均模型。

图10 Y方向累计位移相关性分析结果
3.1.2.2 模型阶次的判定
针对X、Z方向累计位移采用自回归积分滑动平均模型,Y方向累计位移采用滑动平均模型,模型中的参数p、d和q的取值应当依据FPE定阶准则进行确定。其中:X方向累计位移ARIMA模型中的p=1,d=0,q=2;Z方向累计位移ARIMA模型中的p=4,d=1,q=2;Y方向累计位移MA模型中的q=1。
3.1.2.3 结果分析
图11为X方向位移拟合曲线及预测值,对比分析实际监测值、模型预测值,以及拟合值,可以发现预测值与实测值的变化趋势相同,R2为0.660,可以说明该模型的模拟效果较好,能够较好地反映实际趋势。

图11 X方向位移拟合曲线及预报值
表1为根据监测值得到的后续5d预报值,可以发现,随着预测时间的延长,模型的预测准确性也逐渐下降。预测效果降低的原因是由于随着预报步长的增加,预测所依赖的历史数据在减少,进而导致预报精度降低。但整体上预测结果基本符合实际工程需求。对Y和Z方向位移的计算结果进行比较,如图12、图13和表2、表3所示,Y方向R2为0.758,Z方向R2为0.821,结论基本类似。

表1 X方向位移预报值与监测值对比

表2 Y方向位移预报值与监测值对比
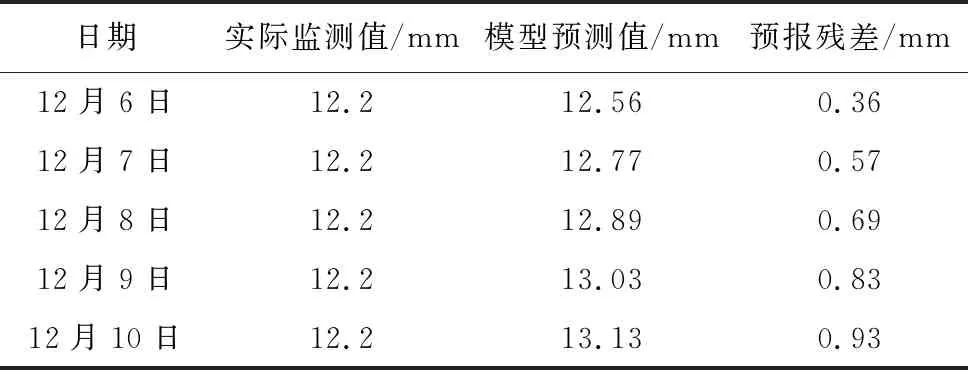
表3 Z方向位移预报值与监测值对比

图12 Y方向位移拟合曲线及预报值

图13 Z方向位移拟合曲线及预报值
采用相同方法对12月11日~12月14日的X、Y、Z3个方向累计位移量进行预报,结果如表4所示。从表中可以发现,Z方向的累计位移量相对较大,在基坑开挖支护过程中需要关注Z方向的监测值变化。

表4 12月11日~17日X、Y、Z方向位移预报值
3.2 危岩裂缝位移监测结果分析
3.2.1 建模预测过程
危岩裂缝的监测时间从2019年8月14日至2019年10月3日, 2019年10月6日至2019年12月10日。采用分段线性插值的方法进行等时距处理,增加2019年10月4日、5日数据,使得实测数据的采取间隔时间一致。测点的插值变形曲线如图14所示。

图14 插值变形曲线
危岩裂缝变形预测思路如下:首先利用2019年8月9日至2019年12月6日的实测数据建模拟合,验证模型准确性; 然后利用2019年8月14~2019年12月10日的实测数据建模外推预测12月11日~12月14日的变形数据。
3.2.2 结果分析
3.2.2.1 相关分析
由图15可以看出,ACF和PACF均呈现出明显的“拖尾”变化,因此可以认为模型形式为自回归积分滑动平均模型。

图15 危岩裂缝位移相关性分析结果
3.2.2.2 模型阶次的判定
针对危岩裂缝位移采用自回归积分滑动平均模型(ARMA(p,q)),其中:p=1,q=4。
3.2.2.3 结果分析
图16为危岩裂缝位移拟合曲线,通过对比可以发现,预测值可以较好地表现实测值的变化情况,R2为0.555。由此可见,该模型的模拟效果良好,能够大致反映实际趋势。

图16 裂缝位移拟合曲线及预报值
表5为根据检测值得到的后续5d预测值,可以发现,模型的预测效果能够基本满足工程的需求。采用相同方法对12月11日~12月14日的危岩裂缝位移量进行预测,结果如表6所示。
表5 危岩裂缝位移预报值与监测值对比

表6 12月11日~17日危岩裂缝位移预报值
3.3 讨 论
基于上述分析可以发现,基坑位移和危岩裂缝变形的实测数据和预测数据的变化趋势具有较好的一致性,充分验证了基于ARMA模型的动态分析方法在可利用数据质量可靠,重复观测频率较高时对于基坑位移和危岩裂缝变形趋势的预测结果精度更高。
此外,所用模型在短期内的预测精度较高,随着预测时间的增加,模型预报残差逐渐增大。由此可知,在后续研究中,不断增加最新监测数据更新模型,可以有效提高模型的预测精度。
4 结 论
本文详细介绍了时间序列预测的基本模型及预测步骤,并以新田长江大桥锚碇基坑工程为例,结合锚碇基坑位移和危岩裂缝监测数据,采用时间序列模型对后期位移进行了预报,具体结论如下:
(1)本文采用ARMA模型预测了新田长江大桥锚碇基坑位移和危岩裂缝变形,发现预测值与实际观测值较吻合,预测效果较好,验证了基于时间序列的变形预测模型可以为及时掌握基坑变形的发展趋势提供科学依据。
(2)基于时间序列的动态分析方法在可利用数据质量高、重复观测频率较高时,模型预测精度较好,而随着预测周期的增长,模型预测精度降低,原因主要是由于历史数据的减少降低了模型预测准确性。由此可知,在基坑位移和危岩裂缝变形监测过程中,不断利用最新的监测数据更新模型,能够确保较高的预测精度。
猜你喜欢
建材与装饰(2022年34期)2022-12-07
建材发展导向(2021年22期)2022-01-18
建材发展导向(2021年18期)2021-11-05
建材发展导向(2021年12期)2021-07-22
石油与天然气地质(2021年3期)2021-06-29
水利科学与寒区工程(2021年1期)2021-03-02
少儿美术(快乐历史地理)(2020年5期)2020-09-11
建材发展导向(2019年3期)2019-08-06
意林·全彩Color(2018年7期)2018-08-13
中国铁道科学(2015年6期)2015-06-21