
哈佛大学微型机器人实验室研究出压电双晶片多足机器人
2021-12-07 16:52
海外星云 2021年17期

哈佛大学微型机器人实验室的罗伯特·伍德教授曾介绍过一种多节段的多足类微型机器人,相关论文题为《多节段足微型机器人》 。
该微型机器人使用压电双晶片作为驱动,体积为3.5厘米x 3.5厘米,重量为750毫克,与一般的六足微型机器人相比,该类型机器人在攀爬、实现多功能性和稳定性方面具有潜在优势。
多节段机器人的运动优势
多节段机器人其设计灵感来源于自然界中的多足动物,这类机器人相比于传统的形态的优势体现在:
1 .速度:虽然如蟑螂和其他六足昆虫的每秒最大运动距离可以达到40倍~50倍自身体长,蜈蚣的每秒的最大运动距离约为10倍自身体长;然而,蜈蚣仍然是敏捷的爬行昆虫之一,其能够捕捉蟑螂和甚至更大的昆虫和哺乳动物。除了利用自身肢体起伏来放大步长之外,蜈蚣肢体固有的灵活性使它们能够在平面上自由移动,使蜈蚣微型机器人在崎岖地形上前进和换向时比同尺寸的传统刚体六足机器人更快。
2 .运动稳定性:由于蜈蚣又称百足虫,自身有大量腿(特定的物種最大能达到191条),这在运动上的体现为运动步态丰富并且增加了运动的稳定性。
3 .高的运动灵敏性和鲁棒性:有研究专家发现当切除蜈蚣一定数量的腿后,其运动能力( 包括步态、速度和稳定性) 变化不大,这表明多节段机器人可能对故障具有鲁棒性。得益于肢体的灵活性,蜈蚣可以从水平表面移动到垂直表面,而步态不会发生剧烈的变化。因此,这类型机器人附节段数的增加,机器人的运动也更加灵敏。
4 .通用性:可以通过增加和去除蜈蚣机器人的节段,以更好地执行不同的任务,可以适用于不同的场合。
但目前制造这类型机器人的难题体现在于,由于微小型机器人的尺寸差异和存在着加工误差,这对机器人的运动难以预测,而且接线一般也是手工焊接的,这种方式费时又不可靠。为了解决这些问题,作者在本研究提出了一种布线方式,并且创建了对应的动力学模型,配合样机实验,对机器人运动的实现了较吻合的预测。
压电双晶片多足机器人的设计和工作原理
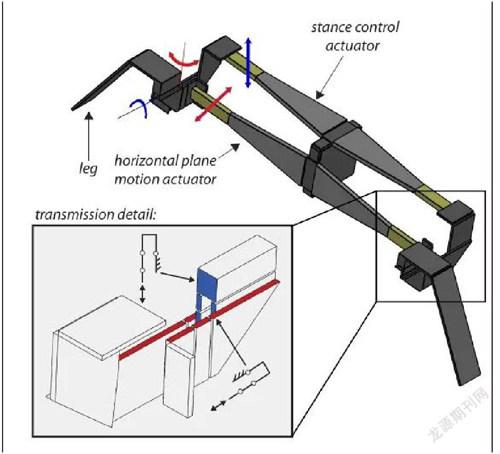
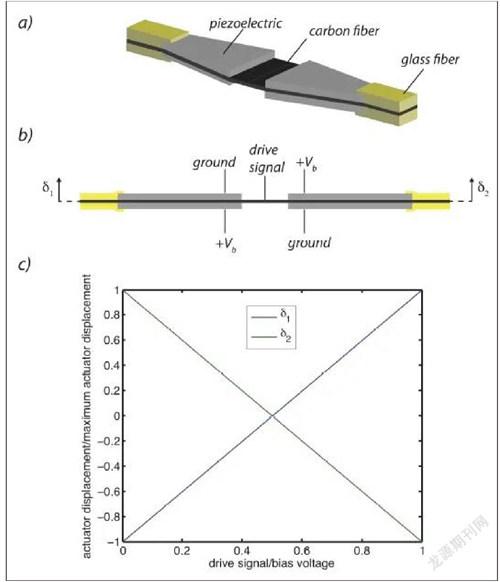
对比压电驱动器(PEA)和形状记忆合金(SMA)驱动器,形状记忆合金驱动器的频率带宽低于压电驱动器,限制微型机器人的步进激励频率。因此在本项研究当中,多足机器人采用了压电双晶片作为驱动器,分别布置在垂直和水平方向上, 以分别实现驱动足的前进/后退,以及升高/降低驱动脚的步进运动。
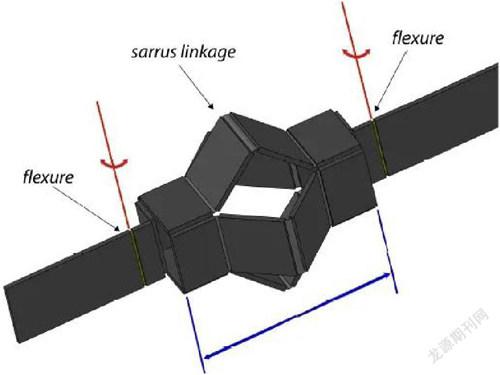
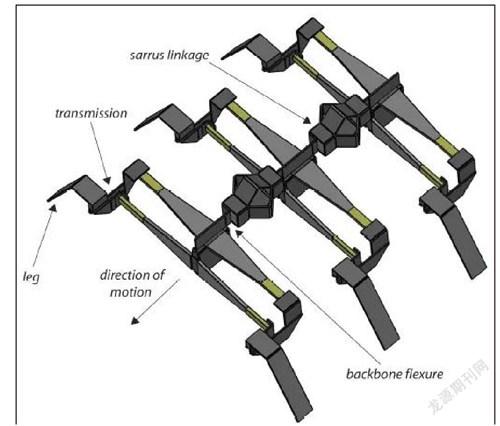
而多节段机器人由多个单节段机器人组成,其中由Sarrus机构将多个节段的机构相连。Sarrus机构是1853年由法国数学家萨鲁斯所发明的一种古典机械机构。
这种机构能够将有限的圆周运动转换为直线运动的机械联动装置,可以将直线运动转换为标准的旋转运动。Sarrus机构是一种空间机构,有时也称为“空间曲柄机构”。它能通过自身构型的变化,实现设备由空间机构向平面机构的转化,从而大大减小自身所占空间。
在接线上,多足机器人每个节段有两个压电双晶片驱动器,分别实现机器人的站立和腿部的旋转运动, 因此需要两个驱动信号。其中,两个压电双晶片驱动器共享一个接地和驱动信号。
每个压电双晶片驱动器的两侧极性相反,换言之,通过每个压电双晶片驱动器仅使用一个驱动信号,就可以实现当机器人的一条腿升起时,另一条腿则预紧于地面上。
类似的,控制水平方向的压电双晶片驱动器可以实现前后运动。如此一来,通过控制电压信号,即可实现对机器人的空间运动控制。
为了保持运动的静态稳定性,作者在本设计中组装了3节段驱动器的微型机器人。并且利用铜迹线大大减少了硅胶线的数量。由于机器人体积小,驱动器的脆性不能施加方波信号,因为信号的瞬时变化会损坏压电驱动器。
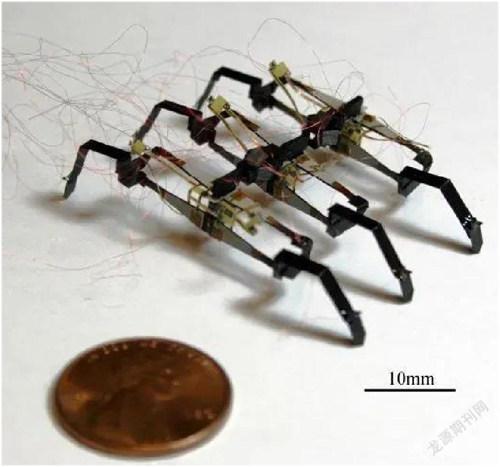
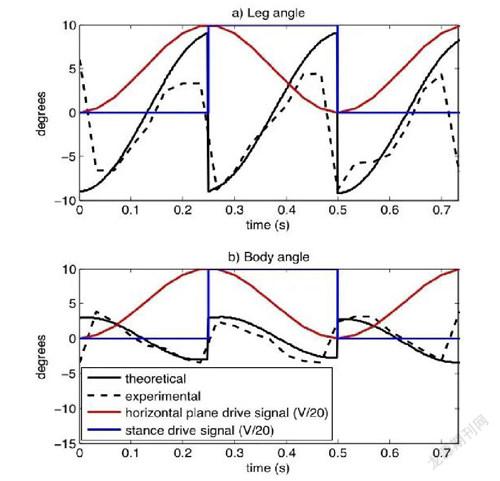
为了实现激励, 作者施加了幅值为200伏 ,频率为2赫兹的正弦驱动信号,站立脚和摆动脚在水平面运动在正弦驱动信号的峰值处切换方向。
其中,提取了中间段的实验腿和节干角度与动力学模型,可以看出,实验值和理论值非常吻合,证明了动力学模型的有效性。
同时,因为驱动脚的切换不是瞬时的,所以运动存在着耦合的现象(即向前/向后运动时, 会产生向左或者向后偏移的情况) 。在实验结果当中, 当激励频率为2Hz时,机器人10秒内前进了约为自身的体长的距离,运动步长介于0.75毫米~1毫米之间。
该项研究提出的压电微型多足机器人为与制造、控制、攀爬和建模相关的研究人员提供了启发,也极大的增强了多足机器人的运动能力,扩展了其应用场景,如应用于搜索和救援任务、危险环境探索和监视的场合当中,具有很高的研究前景和市场前景。(综合整理报道)(编辑/多洛米)
猜你喜欢
中国典型病例大全(2022年12期)2022-05-13
中国典型病例大全(2022年9期)2022-04-19
健康体检与管理(2021年6期)2021-11-17
中国典型病例大全(2021年15期)2021-01-10
居业(2018年5期)2018-10-24
现代职业教育·职业培训(2018年9期)2018-05-14
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
财经(2002年22期)2002-07-01
