双合成波长数字全息低噪声分级解包裹方法*
2021-12-09 09:21刘磊徐志博钱文硕李文杰谢芳钟志2单明广2
物理学报 2021年22期
刘磊 徐志博 钱文硕 李文杰 谢芳 钟志2) 单明广2)†
1) (哈尔滨工程大学,信息与通信工程学院,哈尔滨 150001)
2) (哈尔滨工程大学,先进船舶通信与信息技术工信部重点实验室,哈尔滨 150001)
双波长数字全息中差分合成波长可拓展无相位包裹测量纵深范围,但显著放大相位噪声;加性合成波长可抑制相位噪声,但大幅缩小无相位包裹测量范围.因此,本文利用差分合成波长无包裹测量范围大与加性合成波长噪声低的特性,提出一种双合成波长数字全息低噪声分级解包裹方法.该方法利用由差分合成波长获得的“相位差”引导单波长包裹相位进行解包裹,然后再利用单波长的解包裹后的光程差引导加性合成波长获得的包裹“相位和”进行解包裹,通过分级实现双波长低噪声解包裹.实验结果表明,该方法可以简单、快速地实现双波长数字全息低噪声解包裹.
1 引言
数字全息技术[1−16]基于光的干涉原理,利用相机记录由干涉形成的全息图,并利用计算机实现相位恢复及待测物体形貌等成像测量,具有非接触、高分辨力、全场定量等优点,并广泛应用于生物医学、微细加工和材料工程等测试领域.但目前的研究多集中于单波长照明[3−11],当待测物体引起的光程差大于照明波长时,由于相位恢复过程的反正切函数的周期作用,恢复出的物体相位存在着包裹问题,使测量纵深受限,必须利用单波长解包裹算法进行相位解包裹才能获得待测物体的真实相位.但是,目前单波长解包裹算法普遍计算量很大、恢复速度慢,而且当待测物体存在台阶、沟槽等边缘锐利结构时,单波长解包裹算法会失效.
为了克服单波长解包裹算法存在的缺陷,有研究提出了一种有效解决方案是采用双波长数字全息技术[12−16],其利用两个不同波长的光源进行照明,获取每个波长的包裹相位图,再利用简单的相减计算恢复出差分合成波长对应的“相位差”,实现双波长解包裹.双波长数字全息形成的差分合成波长远大于任一单波长,极大地拓展无相位包裹的测量纵深,且只要待测物体引起的最大光程差不大于该差分合成波长,就不需任何复杂的解包裹算法.但与此同时,差分合成波长显著放大相位噪声,且噪声随着差分合成波长增大而增大,从而限制测量精度和测量范围的提升.为了解决双波长数字全息解包裹噪声放大问题,Gass 等[13]提出了免疫算法,利用“相位差”解算出的光程差,引导单波长的包裹相位进行解包裹;随后,Khmaladze 等[17]和Asundi等[18]相继提出了线性规划法,利用线性规划搜索使两个单波长光程差值最小的整数对,并利用该整数对单波长包裹相位进行相位解包裹,但这些方法噪声水平仍受限于单波长照明时的噪声水平.因此,赵建林等[19]将两个单波长的包裹相位相加,获得加性合成波长对应的“相位和”,从而获得比单波长照明时更低的噪声水平,但因为加性合成波长比任何单波长均小,缩减了无包裹测量纵深.受其启发,吕晓旭等[20]利用“相位差”、“相位和”以及免疫算法改进了双波长解包裹过程,在获得差分合成波长无包裹测量纵深的同时,获得了加性合成波长的低噪声水平,但其需要通过复杂计算获得多个中间变量,造成解包裹速度慢的问题.随后,单明广等[21]以及刘乾等[22]基于直接线性规划导引法,利用“相位差”和“相位和”直接实现双波长低噪声解包裹,虽然思路简单,但是需要最小二乘法在二维空间搜索约束边界条件,计算过程耗时.
因此,本文结合利用差分合成波长与加性合成波长的优势,提出双合成波长数字全息低噪声分级解包裹方法,在实现双波长低噪声解包裹的同时,避免复杂中间量计算,以提升双波长解包裹速度.
2 理论方法
假设双波长数字全息中照明激光的波长分别为λ1和λ2(λ1<λ2),且均小于待测物体引起的光程差,但其差分合成波长λds大于该物体引起的光程差;同时,从双波长全息图中恢复获得单波长包裹相位图分别为φ1和φ2,则由此获得“相位差”φds与“相位和”φas分别为

其中,φds为解包裹的相位但噪声高,对应差分合成波长λds,λds=λ1λ2/(λ1–λ2);φas为包裹的相位但噪声低,对应加性合成波长λas,λas=λ1λ2/(λ1+λ2).
利用光程差与相位之间的物理关系,可获取解包裹相位φds对应的光程差hds,即:

虽然由于λds的噪声放大作用,hds蕴含大量噪声,但hds能够反映待测物体的真实形貌分布.
而两个照明波长对应的光程差可以表示如下:

若不考虑折射率的影响,单波长对应的光程差与差分合成波长对应的光程差理论上应相等,即hi=hds.因此,可以利用hds引导对φi进行解包裹,这里仅以波长λ1为例,并由(4)式可得:

其中,round 表示取最近整数操作.
利用上式计算的k1,便可直接计算出单波长λ1对应的无包裹光程差h1,即

相对于hds,h1在反映待测物体真实形貌分布的同时,降低了噪声,但其仍局限于单波长水平.因此,继续以h1为基准引导低噪声的“相位和”φas解包裹,即:

在确定kas之后,便可利用该值计算出加性合成波长对应的无包裹光程差,即:

在反射式双波长数字全息中,由于光波照射待测物体并被反射回来,has等于待测物体物理高度h 的两倍,即h=has/2;而在透射式双波长数字全息中,has等于h 与待测物体折射率(n–1)的乘积,即h=has/(n–1).因为has由低相位噪声的φas计算,所以待测物体的h 测量精度大大提升.
上述的解包裹过程可定义为分级解包裹法,其流程如图1 所示,按照差分合成波长-单波长-加性合成波长的顺序逐级实现解包裹,整个过程未采用循环计算,也无需像直接线性规划导引法采用最小二乘法在二维空间搜索约束边界条件,因此,整个解包裹过程计算量小,速度快.
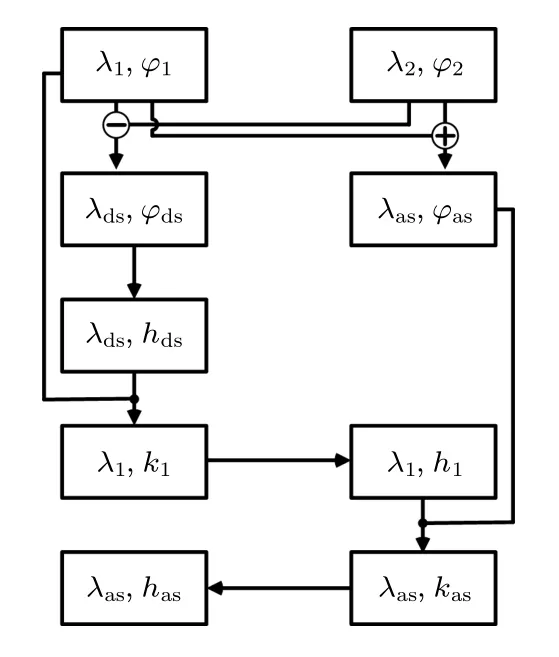
图1 分级解包裹流程图Fig.1.Flowchart of Hierarchical phase unwrapping.
3 模拟验证与分析
为了验证所提方法的有效性,利用计算机进行一系列的仿真实验,其中采用的计算机CPU 为Intel i5-4590,主频3.30 GHz,内存容量16 GB,计算过程仅使用CPU 单核处理.实验使用的照明波长分别为λ1=632.8 nm 和λ2=532 nm,为了便于仿真过程描述,仿真实验中不考虑折射率影响,由此可得加性合成波长λas=289.0 nm 和差分合成波长λds=3339.8 nm.首先,利用PEAK函数生成待测物体,其分布如图2(a)所示,尺寸为500 pixel×500 pixel,高度峰谷值为2198.6 nm;由此生成一个双波长复合全息图,并在归一化后的全息图中添加均值为0,方差为0.001 的高斯白噪声,如图2(b)所示;利用除法相位恢复算法[23]恢复出两个波长λ1和λ2对应的相位,分别如图2(c)和图2(d)所示,从图中可以看出,两幅相位图均产生了明显的包裹.
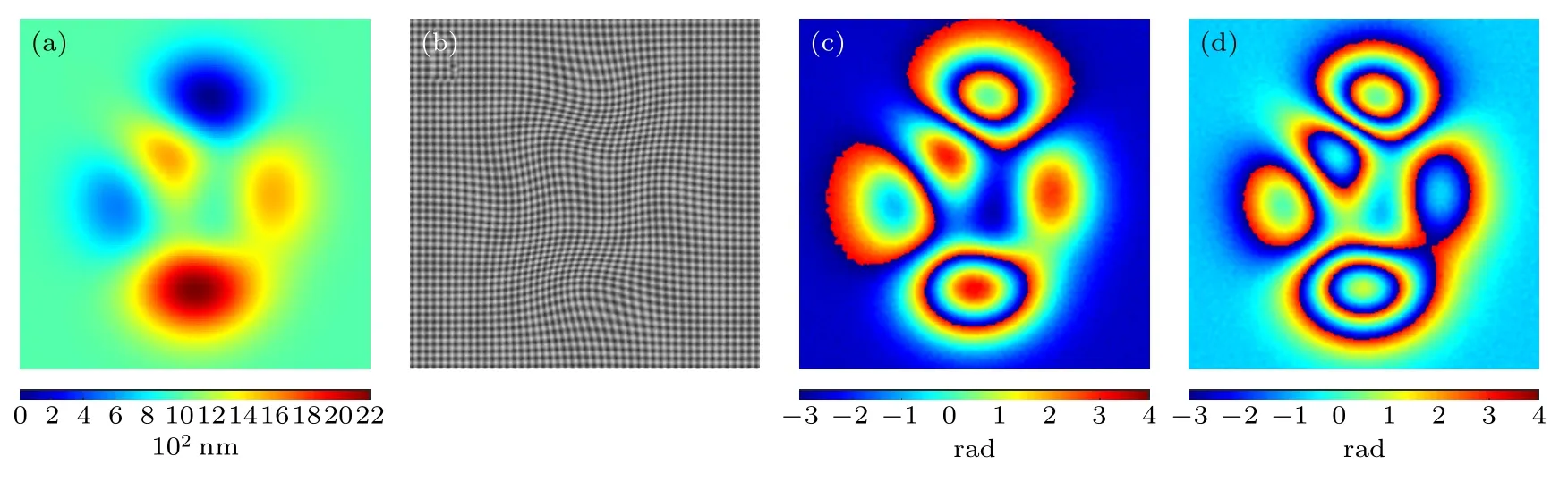
图2 (a)待测物体高度图;(b)离轴全息图;(c) λ1 和(d) λ2 对应的包裹相位Fig.2.(a) Original height map of the simulated sample;(b) simulated multiplexed off-axis hologram;and corresponding wrapped phase maps at (c) λ1 and (d) λ2.
为了展示本文算法的优越性,将传统双波长解包裹算法(算法I)、线性规划算法(算法Ⅱ)和直接线性规划算法(算法Ⅲ),与本文所提算法(算法Ⅳ)进行比较.4 种算法的恢复结果如图3(a)—3(d)所示,与原始值的残差如图3—3(h)所示.为了定量的比较4 种算法的恢复质量,在残差图的右上角标注了残差的标准差(SD)及峰谷值(PV).提取残差图中黑色虚线标注的数据,所得4 组一维数据如图4 所示.显而易见,算法Ⅲ和所提算法Ⅳ可获得更好的恢复质量和更低的噪声,能达到加性合成波长的恢复质量,且优于算法I 和Ⅱ的恢复质量;但相对于算法Ⅲ的1989.5 ms 解包裹时间,所提的算法Ⅳ解包裹时间为20.5 ms,从而使解包裹速度提升了97 倍.
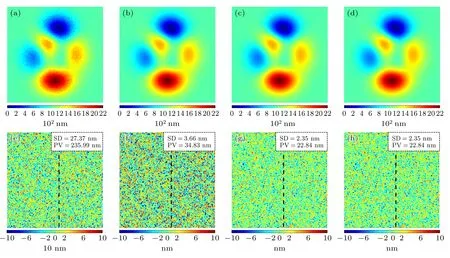
图3 (a)算法I,(b)算法Ⅱ,(c)算法Ⅲ和(d)算法Ⅳ的恢复结果;(e)算法I,(f)算法Ⅱ,(g)算法Ⅲ和(h)算法Ⅳ恢复结果的残差图Fig.3.Reconstructed results by (a) Algorithm I,(b) Algorithm Ⅱ,(c) Algorithm Ⅲ,and (d) Algorithm Ⅳ;and the corresponding residue maps obtained by (e) Algorithm I,(f) Algorithm Ⅱ,(g) Algorithm Ⅲ,(h) Algorithm Ⅳ.
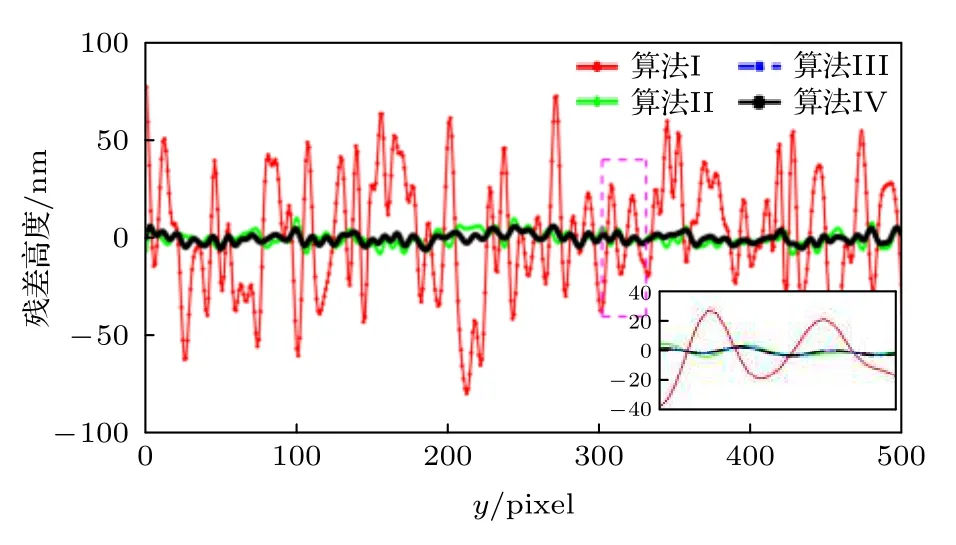
图4 残差图(图3(e)—3(h))中黑色虚线标注数据Fig.4.Data marked with the black dashed lines in residue maps shown in Fig.3(e)–3(h).
为了进一步展示所提算法的抗噪性能,针对被不同方差均值为0 的高斯噪声污染全息图,使用4 种算法进行恢复,得到它们恢复结果的标准差和峰谷值,如图5 所示.从图5 可以看出,随着方差的增大,所有算法恢复结果的SD 值和PV 值均随之增大;由于差分合成波长的噪声放大作用,算法Ⅰ恢复质量最差,且随着噪声放大恢复质量下降剧烈;虽然算法Ⅱ的表现稍好,但低于算法Ⅲ和Ⅳ;令人惊喜的是,算法Ⅲ和Ⅳ受噪声的影响和恢复质量基本一致,但相对于算法Ⅲ,所提算法Ⅳ具有更简单的恢复过程和更快的恢复速度.

图5 残差图(图3(e)—3(h))中(a)标准差和(b)峰谷值Fig.5.Standard deviation and peak-valley value of residue maps shown in Fig.3(e)–3(h).
4 实验结果及分析
为了进一步验证所提方法的有效性,依据文献[24]搭建如图6 所示的视场翻转双波长载波正交数字全息实验装置,其中光源为λ1=632.8 nm的HeNe 激光器和λ2=532 nm 的固体激光器,透镜L1 和L2 的焦距均为200 mm,CCD 的像素数为1024×1280,像素大小为4.8 µm×4.8 µm;待测物体为一个高度为2000 nm 圆柱形相位物体,因其由熔英玻璃制成,相对于两光源的折射率分别为n1=1.457 和n2=1.460.其工作过程为:偏振正交的双波长光束经分光棱镜BS1 合束和准直扩束器BE 准直扩束后,入射至由透镜L1 和L2 构成的共轭4f 系统输入平面,其中1/4 的光照射物体被调制成为物光,另外3/4 部分通过了空白窗口形成参考光;光束经透镜L1 傅里叶变换后被分光棱镜BS2 分成两束,一束被平面反射镜M 直接反射;另一束光经偏振分光棱镜PBS 后分离成双波长波束,分别被角反射镜RR1 和RR2 反射后,再次经过PBS 合束,并经过分光棱镜BS2 与平面反射镜反射的光汇和,最后经透镜L2 傅里叶变换共同到达CCD 的靶面,形成一幅双波长正交载波复合全息图,并被CCD 一次曝光采集.所采集的复合全息图如图7(a)所示,频谱图如图7(b)所示,恢复出的两个波长包裹相位分别如图7(c)和7(d)所示.

图6 视场翻转双波长载波正交数字全息原理图Fig.6.Flipping dual-wavelength common-path digital holography with orthogonal carrier.

图7 (a)复合全息图;(b)频谱图;(c) λ1 和(d) λ2 对应的包裹相位Fig.7.(a) Multiplexed hologram and its (b) power spectrum;and corresponding wrapped phase maps at (c) λ1 and (d) λ2.
如同仿真一样,利用4 种解包裹算法实现双波长解包裹,恢复获得待测物体高度分布结果如图8 所示,而由图8 中白色虚线处获得一维数据如图9 所示.为了定量分析4 种算法,计算4 个恢复高度图中白色虚线方框包围区域的SD 值和PV值,其中SD 值分别为113.34 nm,14.29 nm,8.24 nm和8.24 nm,PV 值分别为253.81 nm,81.81 nm,54.18 nm 和54.18 nm.从图中和计算结果可以看出,如同仿真结果,算法Ⅰ恢复结果波动最严重的,表明其噪声大,而算法Ⅲ和Ⅳ的恢复结果最为平稳,表明它们恢复质量最好.
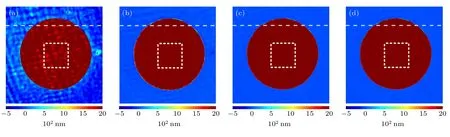
图8 圆柱恢复结果 (a)算法I;(b)算法Ⅱ;(c)算法Ⅲ;(d)算法ⅣFig.8.Reconstructed results of the step target by (a) Algorithm I;(b) Algorithm Ⅱ;(c) Algorithm Ⅲ;(d) Algorithm Ⅳ.

图9 恢复结果的一维剖面图(图8 中白色虚线)Fig.9.Reconstructed result of 1 D height profiles(along the white dashed lines in Fig.8).
为了验证本算法在连续形貌物体测量上的有效性,在第2 个实验中,将一滴酒精滴在载玻片上,观察酒精的蒸发的过程,其中某一时刻酒精形貌的恢复结果如图10 所示,白色虚线处的一维恢复结果如图11 所示.从恢复结果可以看出,本算法可以实现连续形貌高质量恢复.
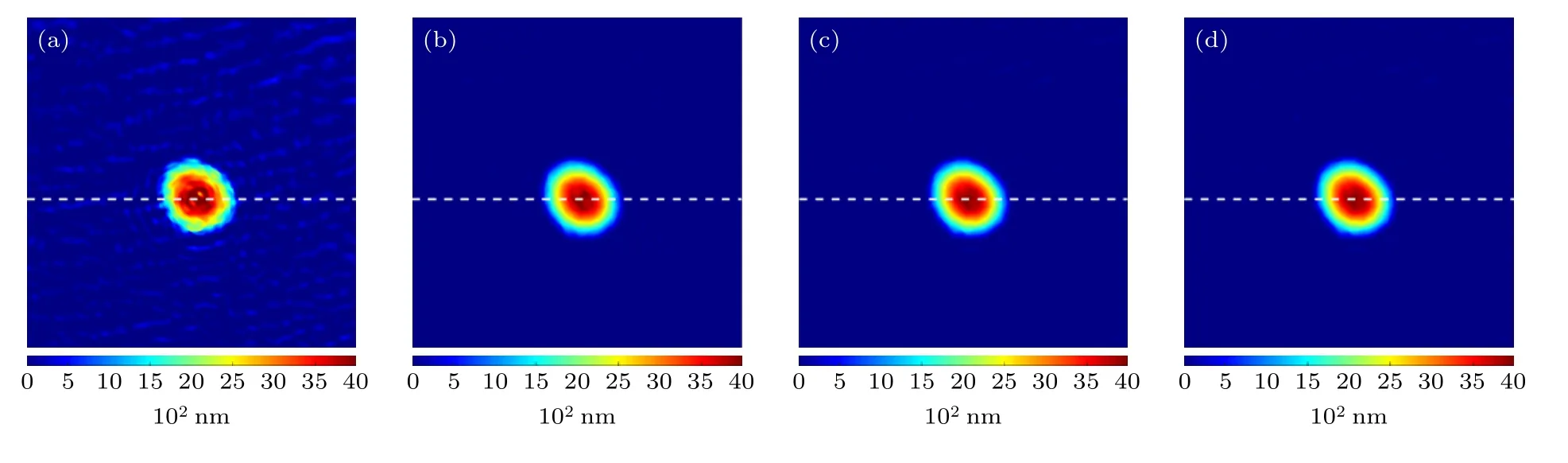
图10 液滴酒精恢复结果 (a)算法I;(b)算法Ⅱ;(c)算法Ⅲ;(d)算法Ⅳ;Fig.10.Reconstructed result of a drop of alcohol:(a) Algorithm I;(b) Algorithm Ⅱ;(c) Algorithm Ⅲ,;(d) Algorithm Ⅳ..

图11 恢复结果的一维剖面图(图10 中白色虚线)Fig.11.Reconstructed result of 1 D height profiles (along the white dashed lines in Fig.10).
传统的双波长解包裹算法由于噪声放大问题,在造成恢复质量下降的同时,降低了双波长共路数字全息的系统稳定性.因此,在评价恢复质量的同时,利用所提算法分析了系统的稳定性.在实验中,在无样品的情况下以30 s 为间隔采集100 幅全息图,任意选择其中1 点,计算出该点在每个波长下的波动范围,并计算其方差,如图12 所示.其中,算法Ⅰ、Ⅱ、Ⅲ和Ⅳ对应的标准差分别是31.02 nm,9.32 nm,7.72 nm 和7.72 nm.可见,使用本方法不仅可以提升恢复质量,也使系统的稳定性显著提升,从而证明本方法可用于动态测量的低噪声解包裹.
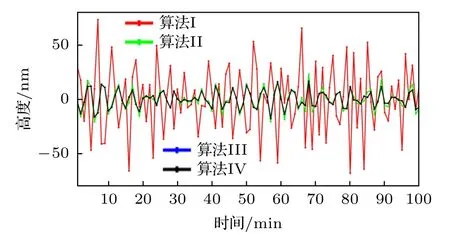
图12 稳定性实验Fig.12.Stability test for the proposed method.
5 结论
本文充分利用差分合成波长和加性合成波长各自的优势,提出一种双合成波长数字全息低噪声分级解包裹方法,按照差分合成波长-单波长-加性合成波长的顺序,逐级分布解包裹,达到加性合成波长解包裹噪声水平.实验结果表明,所提方法不仅成像恢复质量高,而且计算过程简单、速度快,同时提高了双波长共路数字全息系统稳定性,从而为双波长数字全息实现台阶、沟槽等边缘锐利物体高精度成像测量奠定了理论基础和实验基础.
猜你喜欢
网络与信息安全学报(2021年6期)2022-01-18
聊城大学学报(自然科学版)(2020年1期)2020-11-27
天文研究与技术(2019年4期)2019-10-23
数字通信世界(2019年3期)2019-04-19
系统管理学报(2018年3期)2018-08-13
系统管理学报(2018年2期)2018-08-13
中国光学(2016年1期)2016-02-26
发明与创新·中学生(2015年9期)2015-09-05
应用光学(2015年3期)2015-06-10
光学仪器(2012年1期)2012-01-21