USSV 与AUV协同工作系统设计
2021-12-10 17:03李壮壮谈果戈唐梓力
舰船科学技术 2021年10期
刘 蔚,李壮壮,邹 劲,谈果戈,董 超,唐梓力
(1. 国家海洋局南海调查技术中心,广东 广州 510300;2. 自然资源部海洋环境探测技术与应用重点实验室,广东 广州 510300;3. 南方海洋科学与工程广东省实验室(珠海),广东 珠海 519000;4. 哈尔滨工程大学船舶工程学院,黑龙江 哈尔滨 150001;5. 珠海云洲智能科技有限公司,广东 珠海 519099)
0 引 言
自主式水下航行器(Autonomous Underwater Vehicle,AUV)具有机动性好、安全、智能化、噪声小等优点,成为实施各种水下任务的重要工具[1-2]。但AUV往往针对单一的水下区域进行作业,受到水下通信和定位的制约,作业范围和效果受限且信息获取类型少。针对该问题,国内外研究学者提出的跨域无人装备协同作业模式,成为了当今无人海洋装备研究的热点[3]。
近些年来,国内外有关跨域无人装备协同作业模式的研究中大都采用无人水面艇(Unmanned Surface Vehicle,USV)辅助下的AUV作业[4-5]、USV辅助下的无人水下航行器(Unmanned Underwater Vehicle,UUV)作业[6]和多AUV协同作业[7-8]3种模式。USV辅助作业模式解决了AUV/UUV在水下工作时通信、定位困难问题,但USV的隐蔽性较差且受波浪的影响较大,致使这种模式很难在未知水域中展开;多AUV协同模式虽然利用水下空间位置差异实现了AUV之间的协同导航[8],但在工作时无法实现实时操控、通信,存在环境适应能力较差、回收困难等问题。
1 设计概况
针对现存的跨域无人装备协同作业模式存在的问题,设计以AUV为核心、USSV为信号中继站的协同工作系统,系统由USSV、AUV、基站和远程控制端构成,执行的工作模式如下:
1)基站在收到远程控制端发送的任务信息后,由搭载的有人驾驶船舶从港口驶向与目标水域一定距离的安全区域并投放USSV和AUV(见图1),其在借助搭载的设备对基站附近水域进行水面和近水面侦察和勘测的同时,对AUV在某些需要人员介入的作业过程提供航行控制。

图1 协同工作方式Fig. 1 Cooperative working method
2)在远程控制端下达任务指令后,基站搭载的人员根据区域环境建立任务环境态势图;AUV离开基站执行任务时,通过USSV接收来自基站传递的指令,于近水面附近驶向目标水域,同时,USSV与其伴随航行,在到达目标水域外围后,AUV进行下潜作业,USSV保持静浮。
3)任务结束后,AUV就地上浮或驶离目标水域后上浮,通过USSV向基站发送定位、运动、环境勘测等工作信息,基站根据AUV的定位位置进行运动控制并将其回收。
同时,在到达目标水域后,系统中基站、USSV和AUV之间由于通信限制,需要保证USSV在基站无线电信号的最大通信范围内、AUV在USSV的声呐最大通信范围内[10]。
2 远程控制端-基站- USSV-AUV通信、控制、定位系统设计
2.1 通信系统
海上通信方式,按照传输媒质的不同可以分为无线电和有线电通信;按照工作频率的不同可以分为长波、短波、超短波、微波通信等[9]。协同工作系统将通信联系划分为3个部分:远程控制端-基站通信、基站-USSV通信和USSV-AUV通信,各部分通信方式的选择如表1所示。

表1 通信方式的选择Tab. 1 Choice of communication method
远程控制端-基站通信采用卫星通信,实现远程控制端和基站在海上远距离通信并可以保证通信质量。基站和USSV采用的无线电短波通信方式,可较好地支持数据话音、传真、静态图像和计算机数据保密通信业务[9],且经济有效。USSV和AUV在水下环境采用声呐通信方式。
2.2 控制系统
AUV和USSV在控制系统的选择上保持一致。以USSV为例(见图2),USSV的首部安装侧推、尾部安装垂推,为无人艇提供转向动力和垂直动力;两侧加装减摇鳍,减轻无人艇在遭遇浪、流时发生的横摇运动。针对无人艇可能遭遇的纵倾变化,使用丝杠机构改变重心位置来进行调整。丝杠机构结构简单、噪声小且调节过程呈线性,对小型无人艇的隐蔽性和搭载设备的稳定工作有利。侧推、垂推、减摇鳍和丝杠分别由相应的反馈控制单元进行控制。

图2 控制系统示意图Fig. 2 Control system diagram
无人艇进行调整纵倾时,控制丝杠使得滑台移动,以无人艇抬首时滑台前移距离a为例,无人艇的重心前移,产生垂直于无人艇方向的合力F1,与尾部动力推进力F形成力矩减小纵倾。当无人艇需要转向时,以无人艇左转向为例,启动侧推产生垂直于艇体方向的力F2,与尾部动力推进力F形成力矩控制转向。滑台的移动距离和方向、侧推的转速和旋转方向分别与纵倾角、转向角相关。
2.3 USSV-AUV定位设计
USSV-AUV定位包括水面定位和水下定位,水面定位采用卫星定位获取水面二维位置信息,卫星定位模块分别安装在USSV的上层结构和AUV的主舱;水下定位利用定位声呐、水听器、罗经和压力传感器等设备获取AUV在水下的三维位置信息,区别于传统的超短基线水下定位系统将声信标安装在定位目标上向水面船只发送声波信号的方法,协同工作系统将定位声呐安装在USSV艇体底部、水听器安装在AUV(定位目标),以期减轻系统中存在多个AUV定位的数据处理繁杂问题并降低多个定位声呐造成的成本激增。水面、水下定位原理如图3所示。
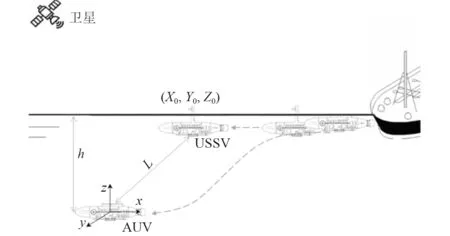
图3 协同定位原理Fig. 3 Co-location principle
AUV在t0时刻入水,记此时USSV的卫星定位信号坐标(X0,Y0,Z0)、罗经读取AUV运动方向与坐标轴X的角度θ。USSV搭载的定位声呐与AUV上的水听器测算时刻t时两者的距离L;USV上的压力传感器读出水压P,则AUV所在深度为:

式中:ρ为水的密度;g为重力加速度。USSV和AUV在水平面x,y方向上的距离分别为:

AUV搭载的罗经测算t0时刻其在x,y,z方向的加速度分别为,则其在单位时间不同方向航行的距离分别为:

则AUV在航行单位时间后的位置坐标可以记为(X0+Lx+x0,Y0+Ly+y0,Z0+h+z0),据此测算任意单位时间后AUV在水下的位置信息。
3 协同工作系统的总布置和电路系统设计
3.1 协同工作系统的总布置
USSV包括5个部分:首舱、侧推舱、主舱、尾舱和上层结构,总布置如图4(a)所示。首舱安装成像声呐,布置在艇体水下部分,用于对USSV附近水域的近水面环境探测;侧推舱为USSV提供径向推力;主舱包括丝杠、罗经、GPS、通信声呐和定位声呐,为USSV提供姿态信息并进行纵倾控制的同时,实现对AUV的通信和定位;尾舱提供航行推动力,控制航速;上层结构包括摄像头、激光雷达和天线,用于探测水面环境信息并与基站通信。

图4 无人艇的总布置Fig. 4 General arrangement of unmanned boat
AUV包括4个部分:首舱、垂推舱、主舱和尾舱,总布置如图4(b)所示。主舱上方安装压力传感器、水听器和通信声呐,在AUV下潜后,获得水下压力信息,同时与USSV进行水下通信并完成辅助定位;其他舱室的布置与USSV相同。
基站由一艘具备远距离输送及长距离通信能力的船舶承担,它的构成包括:无人艇储放装置、通信设备、信息存储模块、遥控和显示组件等。无人艇储放装置用于基站携带、释放、回收无人艇。通信设备分别建立与远程控制端和USSV的通信联系。在海上通信中断的情况下,信息在存储模块中临时存储,作为搭载人员对无人艇信息处理的依据。
远程控制端作为协同工作系统的中枢,兼具任务规划、指令下达和对外通信功能,设有港口、工作间等配套设施。工作间保障远程控制端与基站之间信息进行双向传递,接收来自基站包括无人艇的运动路径、水面水下环境图像、基站对无人艇的操纵信息等各类信息,并向外发送任务指令。港口负责基站和无人艇的临时停靠、日常维护等。
3.2 电路系统设计
结合USSV和AUV的工作需要和所处的空间环境,分别对其电路系统进行设计,如图5和图6所示。
4 协同定位仿真实验
利用Matlab软件对USSV和AUV的协同运动进行仿真,并验证AUV水下定位的精度。给定USSV和AUV的规划路径,对AUV从USSV释放后下潜进行作业且USSV伴随AUV航行这一过程进行模拟。为了对定位算法进行验证,给定AUV在75 s内的角速度和加速度信息,用以模拟AUV的光纤罗经及惯性导航系统模块的信号输出,计算对应时刻AUV在水下的三维位置信息,并与相应运动信息下的设定路径进行对比,验证定位精度。仿真中AUV的设定运动情况如表2所示。
假设AUV从USSV释放后的初始位置坐标为(0,0),所处水下位置的压力为2 940 Pa(按式(1)计算所得深度H=3 m)。之后AUV沿规划路径航行,通过角速度和加速度信息对自身航位进行计算。假设光纤罗经及惯性导航系统模块的信号采样周期为0.1 s,根据上述信息通过仿真获得AUV的运动轨迹如图7(a)所示。为了验证水下定位精度,将不同测量点下AUV仿真轨迹与其规划路径进行对比,所得二者之间的偏移量如图7(b)所示。

图5 USSV的电路布置Fig. 5 Circuit layout of USSV
从仿真结果来看,在AUV执行任务的过程中,USSV根据通信声呐获得的AUV水下位置信息对自身的航速和航向进行反馈控制,使得USSV可以伴随AUV航行,二者之间的距离一直保持在通信范围以内,则USSV可以实现对AUV的通信中继。同时,在AUV运动的75 s时间内,根据水下定位方法利用光纤罗经和惯性导航系统模块对AUV的水下位置进行计算得到的结果与其规划路径之间的最大偏移量没有超过4 m,定位精度比较可靠。但从图7(b)中可以看出,利用光纤罗经和惯性导航系统对AUV的水下位置进行推算的误差随时间累积这一弊端仍然存在,因此为了满足AUV水下定位的精度要求,需要其在规定时间内上浮到海面上使用GPS进行定位校正。

图6 AUV的电路布置Fig. 6 Circuit layout of AUV

表2 无人艇的运动信息Tab. 2 Movement information of unmanned boat

图7 仿真结果Fig. 7 Simulation results
[][]
5 结 语
传统的几种AUV跨域无人装备协同作业模式存在系统隐蔽性和实时性较差、受海上风浪影响较大等问题,导致AUV的工作范围和工作环境受限。针对上述问题,本文提出了USSV与AUV协同工作系统。协同工作系统利用USSV作为信号中继站,配合基站对AUV进行协同位置定位、运动控制并实施与远程控制端的多级通信,在保证无人艇基本运动指标的前提下,提升了系统的隐蔽性和工作的稳定性,进而扩大AUV的环境适应力。提出的基于USSV运动轨迹信息的AUV水下定位方法,偏移误差在75 s内呈增大趋势,但在设定时间内的最大偏移量不超过4 m,有一定的实际应用价值。提出的协同工作模式对于开展离岸侦察、海洋资源开发具有重要意义。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国新通信(2022年4期)2022-04-23
恋爱婚姻家庭·青春(2019年9期)2019-12-10
恋爱婚姻家庭(2019年26期)2019-09-14
文萃报·周二版(2019年32期)2019-09-10
价值工程(2017年4期)2017-02-16
东方教育(2016年15期)2017-01-16
现代兵器(2016年12期)2016-12-22
现代兵器(2016年12期)2016-12-22
少年科学(2009年10期)2009-07-09