开阔水域直航船自主避碰决策方法
2021-12-24 02:17贺益雄李丽玲胡惟璇牟军敏
武汉理工大学学报(交通科学与工程版) 2021年5期
贺益雄 李丽玲 胡惟璇 牟军敏
(武汉理工大学航运学院1) 武汉 430063) (内河航运技术湖北省重点实验室2) 武汉 430063)(武汉交通职业学院3) 武汉 430065)
0 引 言
智能航行是智能船舶八大功能模块之一[1],进阶功能要求船舶在开阔水域按照预定航路实现自动避碰并自主航行.其决策系统需智能识别航行态势,确定避碰方案.根据《1972年国际海上避碰规则》(以下简称《规则》),本船所承担的权利、义务和应采取避碰行动时机和方案取决于会遇态势中角色.文献[2-3]研究了交叉相遇、追越局面中让路船和对遇局面船舶的自动避碰行动方案.《规则》中第13、15条对直航船可独自采取和应采取避碰行动时机、方案只有原则性规定,因此有必要开展量化研究,为自主避碰决策提供基础理论和方法.
文献[4-5]对碰撞危险、紧迫局面、紧迫危险,以及直航船保向保速的含义进行了解读.尤庆华[6]总结了交叉相遇局面直航船四个会遇阶段的时空界限和行动纲要,提出了定量标准.张铎[7]根据《规则》解读了交叉相遇局面中直航船可独自采取避碰行动的时机,分析了让路船与直航船的法律义务关系.范海涛[8]提出交叉相遇直航船可独自采取避碰行动时机是紧迫局面形成点(first time-point of close situation,FTCS)或在此之前,应采取避碰行动的时机是紧迫危险形成点(first time-point of immediate dangerous,FTID).周振路[9]研究了不同交叉相遇局面下直航船的避碰行动时机和方案.李家骈等[10]提出在让路船没有履行让路责任与义务时,直航船应更积极主动地行动,可采取避碰行动的时机应早于FTCS.赵月林[11]结合“桑吉”轮与“长峰水晶”轮碰撞事故,阐述了交叉相遇局面适用时机和保向保速的含义.
因此,会遇局面各个阶段含义、直航船避碰行动时机和方案的总体原则已明确.但考虑船舶尺度和操纵运动特性,提出具有工程应用价值、可自主执行的直航船自主避碰决策方法,还有待深入研究.目前,自动控制船舶转向的航向控制系统已装船实用,亟待解决以该类系统为执行机构时直航船自主确定避碰行动时机和方案的问题.
开阔水域中船舶定速航行,由于主机保护程序和船舶惯性大等原因,减速避让基本不可行,只能改向避让.文中以《规则》和良好船艺为基本原则,结合船舶领域理论,基于MMG(mathematical model group)模型和模糊自适应PID(proportion integral derivative)航向控制系统实现本船非线性改向运动过程预测,提出符合航海实践和船舶运动特性等的自主避碰决策方法,完成直航船会遇过程中的阶段划分、自动避碰行动时机和方案选择,并仿真验证.
1 会遇阶段与应采取的行动
按照《规则》第13、15和17条等的规定,直航船的避碰行动时机和行动原则可以总结为:①碰撞危险未形成阶段,可自由采取避碰行动;②碰撞危险形成之后,应履行保向保速的义务;③当发现让路船显然没有按照《规则》采取避碰行动,直航船可独自采取操纵行动,但交叉相遇局面直航船,如当时环境许可,不应对在本船左舷的船采取向左转向;④当直航船发觉不论由于何种原因逼近到单凭让路船的行动不能避免碰撞时,也应采取最有助于避碰的行动.根据《规则》第2条的规定,如需背离《规则》采取避碰行动,直航船应当背离《规则》采取行动.
Goodwin提出了船舶领域定义:船舶领域指船舶操纵人员意图防止他船和静止物标进入的船舶周围一定范围内的有效区域.文献[12]认为船舶领域是指在船舶周围一个主观或客观的不受侵犯的区域.文献[13]定义紧迫局面:存在碰撞危险的两船不论由于何种原因相互驶近到单凭一船最有效的避让行动已不能使两船在安全距离上驶过开始,到单凭一船的最有效避让行动已不能避免发生碰撞之前的一种局面.该定义已被航海界广泛接受,实际上描述了FTCS和FTID的物理意义,紧迫局面存在于FTCS和FTID之间.文献[14]将操满舵作为最有效的避碰行动,这种思维方式接近于人类思维,而对于装备有航向控制系统的智能船舶,需要另行定义最有效避碰行动.
结合航向控制系统特性,定义FTCS/FTID为:自该时间点开始,交叉相遇和追越局面中存在碰撞危险的两船不论由于何种原因相互驶近到单凭本船航向控制系统采取最有效的避让行动,已不能使他船在本船船舶领域以外驶过/已不能避免碰撞.
2 基础模型与方法
2.1 船舶领域模型
建立两个坐标系:固定坐标系XOY,X、Y轴正方向分别指向正东、北方向;随船坐标系xoy,x、y轴正方向分别指向右舷、船首方向,见图1.坐标转换关系:
[X,Y]=[x,y]·A+[X0,Y0]
(1)

考虑《规则》条款和良好船艺,具有多年船长工作经历的研究人员选用图1的船舶领域模型,本船位于圆或椭圆的后部,在本船前部和右舷留有较多安全距离,更为贴近航海实践.为方便计算,假设在船舶领域中心有一艘虚拟船.
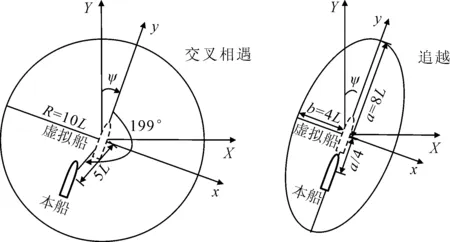
图1 船舶领域
R为圆半径;a、b分别为椭圆长、短半轴长;L为船长.船舶领域是一个统计学概念,特定船舶领域模型很难满足所有船舶的需要.针对实践中的特定场景,图中参数可由本船船长根据情况调整.以虚拟船的圆心作为随船坐标系的原点,圆形船舶领域边界方程为
x2+y2=R2
(2)
椭圆形船舶领域边界方程为
(3)
2.2 三自由度MMG模型
本文研究开阔水域中直航船的自主航行.该水域船舶密度较小,在天气良好时可使用三自由度MMG模型,仅考虑横荡、纵荡和首摇运动.

(4)
式中:各参数物理含义详见文献[15].
2.3 航向控制系统
自主航行船舶的航向控制系统可采用图2的模糊自适应PID控制方法.

图2 模糊自适应PID控制原理图
图2中yd和y为目标航向和实际航向.模糊控制器的输入量包括航向差(e)和转首角速度(ec);输出量为PID参数Kp、Ki、Kd.采用正态型高斯函数作为隶属度函数,所采用的模糊规则详见文献[16]中的参数Kp、Ki、Kd调节规则表.
基于MMG和模糊自适应PID控制的航向控制系统可在已知船舶初始运动状态和改向幅度的情况下,求取任意时刻船舶的位置、航向和航速等船舶运动状态参数.
3 基于航向控制系统的局面要素模型
3.1 碰撞危险形成点
碰撞危险形成点(first time-point of collision risk,FTCR)、FTCS和FTID统称为局面要素.根据四个阶段的时空界限和船舶在各个阶段的操纵行动,交叉、追越局面FTCR量化标准见表1.
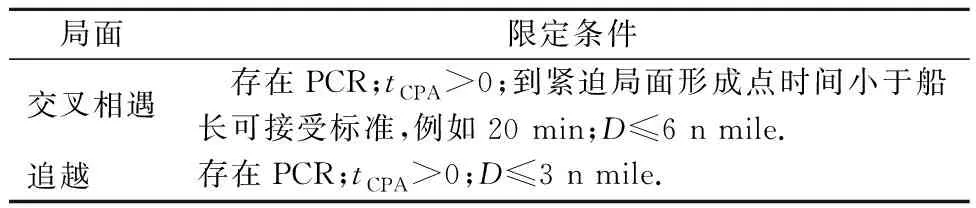
表1 碰撞危险开始适用的限定条件
表1中,PCR为指潜在碰撞危险(potential collision risk),表示若两船保持当前航向航速,目标船最终将不能在本船船舶领域以外通过;tCPA为最近会遇时间;D为本船与目标船的距离.目标船坐标由式(5)计算,PCR是否存在可由以下方法确定.
(xr(t),yr(t))=(xr(0),yr(0))+(u,v)·t
(5)
式中:(xr,yr)和u、v为目标船xoy中的坐标和沿x、y轴速度;t为时刻.追越局面中,将式(5)、式(3)联立可得:
(a2u2+b2v2)·t2+2(uxr(0)a2+vyr(0)b2)·t+
a2(xr(0))2+b2(yr(0))2-a2b2=0
(6)
根据方程(6)的解的情况可以判断PCR是否存在,判断条件详见表2.

表2 PCR存在的判断条件
交叉相遇局面中,船舶领域模型为圆形,因此在上述计算方法中将式(5)、式(2)联立,令R=a=b并化简即可.
3.2 紧迫局面形成点(FTCS)
FTCS的含义可以理解为某个时间点,若最有效改向幅度为θ,在该时间点采取改向θ时,让路船将和本船船舶领域相切通过;该时间点之后,航向控制系统中无论输入多大改向幅度控制本船转向,让路船都将会进入本船船舶领域.在交叉相遇和追越局面中,直航船独自采取避碰行动的过程见图3.

图3 直航船避碰行动过程
图3中Dv、DT分别为目标船到本船船舶领域中虚拟船、沿本船船舶领域中心方向边界距离;RT为虚拟船沿目标船方向到船舶领域边界的距离;t时刻的DT值DT(t)是关于时间t、避让行动时刻tm以及预设改向后的角度Cp的函数:
DT(t)=f(t,tm,CP)
(7)
设固定坐标系XOY中本船、虚拟船中心坐标分别为(X1,Y1)、(Xv,Yv),航速v1,航向C1,本船船长L1;他船中心坐标(X2,Y2),航速v2,航向C2,他船船长L2.交叉相遇、追越局面DT(t)可用式(8)、(9)计算:
(8)
(9)
式中:Q为目标船舷角,可以根据两船相对位置和本船航向求取.
若本船为交叉相遇局面中的直航船,在改向操纵时刻tm前,可按匀速直线运动求取本船位置(X1(t),Y1(t)).改向后,可由tm时刻的本船初始状态,模拟船舶向右改向指定幅度θ0(Cp=C1+θ0)的操纵过程,进而计算(X1(t),Y1(t)).令g(tm,Cp)=min(DT(t))=min(f(t,tm,Cp)),其中min(f(t,tm,Cp))表达的物理含义为本船从当前时刻起保持匀速直线运动,在tm时刻向Cp改向,是改向运动过程中目标船沿虚拟船方向距离本船船舶领域距离的最小值.当Cp确定时,g(tm,Cp)是关于tm的一元方程,可写成g(tm).
g(tm)=min(DT(t))=min(f(t,tm))=0
(10)
方程(10)的解为在tm时刻改向θ0,DT的最小值为0,让路船将与本船船舶领域相切通过.
根据问题的物理意义,存在PCR时,在让路船较远时,即使改向较小幅度,让路船仍将和本船船舶领域相切通过,此时存在多个θ0满足方程(10)有唯一正解;然而,随着两船靠近,只有输入一个较大的θ0,方程(10)才有唯一正解;在tFTCS时刻,当且仅当改向幅度θ0=θ时,方程(10)有唯一正解,换言之,当某时刻仅有一个改向幅度使得方程(10)有唯一正解时,该时刻即为tFTCS.在此之后,无论输入多大的改向角,让路船将进入本船船舶领域.
g(tm)形式很复杂,无法求取解析解,但可结合问题的物理意义寻求数值解.显然,g(tm)在解附近是单调连续的,若还未形成紧迫局面,在区间(0,tCPA)有且只有一个解.其数值解法见图4.

图4 基于航向控制系统的FTCS数值求解方法
追越局面类似,只需将船舶领域模型改为图1的椭圆形,改向方向变为最有效改向方向.
3.3 紧迫危险形成点(FTID)
为保留一定安全空间,定义两船碰撞是指两船重心距离接近至小于两船船长之和的一半.FTID为该时刻当本船采取向最有效方向改向θ0时,目标船重心运动轨迹与圆形区域相切的时间点.其计算方法同FTCS,只需要将船舶领域改成半径R为两船船长之和的一半的圆形区域即可.
在某一时刻,最有效方向可用两种方法确定.
1) 向左、右能避让目标船的最小改向幅度为α1、α2.α1<α2、α1>α2分别表示向左、右最有效,`α1=α2则相同.
2) 确定改向幅度,向左、右能避让目标船的最晚时间点为t1、t2.t1
这两种判别方法融入了当前会遇态势和本船操纵性能,求解过程和难度相近,分别从改向幅度和行动时机两个维度分析,适用于所有会遇局面.
4 直航船避碰行动时机与方案
4.1 碰撞危险形成之前
在FTCR前,直航船可自由采取避碰行动.按照《规则》第8条和良好船艺的要求,改向幅度在保证目标船安全通过的前提下不宜太小,以便本船改向时目标船能及时发现本船动态.具体数值可由船长设定,自主航行系统自主执行.
4.2 碰撞危险阶段
在碰撞危险阶段,直航船应保向保速,直到《规则》第17条规定的情况出现,方可独自采取避让行动.独自行动时,交叉相遇局面直航船只能向右转向,而被追越船应向最有效改向方向避让.避让的时机是FTCS或之前的某个时机.
按《规则》第8条,任何船舶采取的避让行动应该是大幅度的.可认为:若让路船一直没有按照《规则》采取避让行动,两船接近到本船需要采取大幅度的行动才能安全避让时,已满足第17条中“让路船显然没有按照《规则》采取避碰行动”的要求,本船即可独自采取避让行动.由此,可预设一个“大幅度的改向幅度”,以确定独自采取避碰行动的时机.当两船接近到某个时间点,达到该转向幅度方能安全避让时,航向控制系统将自主执行避让操作.一般认为“大幅度”的含义是至少改向30°或降速一半,开阔水域中只考虑改向避让,上文所述的大幅度改向可以设置为30°或更大.计算方法和3.2节FTCS时刻求取方法类似,只需将改向幅度定为30°或其他值.
4.3 紧迫危险阶段
当构成紧迫危险时(FTID以后),单凭让路船的行动已经无法避免碰撞,直航船必须采取最有助于避免碰撞的行动,应向最有效改向方向采取大幅度的转向行动—改向90°或以上,直到两船中心距离开始变大.
5 仿 真
选用一艘名为“CAPE SPLENDOR”的散货船作为本船进行仿真试验,主要船舶资料见表3.交叉相遇和追越局面初始状态见表4.交叉相遇局面预设不同改向角度的最晚避碰行动时间点见图5.
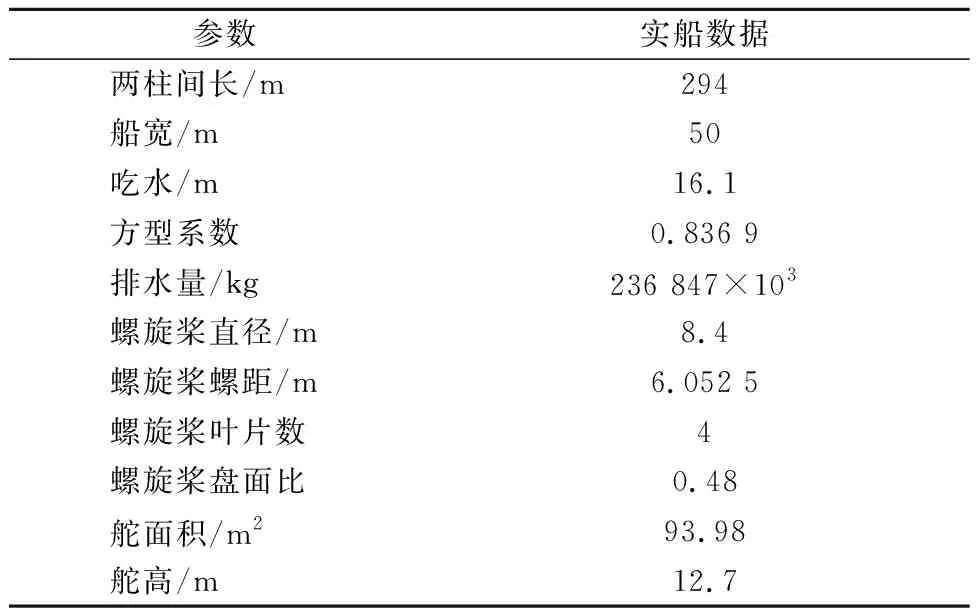
表3 “CAPE SPLENDOR”主要船型参数

表4 交叉相遇局面中船舶初始状态

图5 交叉相遇直航船不同改向角度的最晚行动时间点
由图5可知,在该会遇态势下的直航船:
1) 按3.3的方法2,向右为最有效方向.
2) FTCR之前自由行动阶段,可以采取向右转向避让的方案.
3) 向右改向能安全避让的最晚时间点tm=1 487 s,对应改向幅度105°.1 487 s后,无论预设多大改向角,目标船将无法安全通过.因此,可认为该时间点以后构成紧迫局面,即为FTCS.
4) 若船长根据《规则》和良好船艺预设一个改向幅度(例如30°),本船中止保向保速独自采取避碰行动的时机可相应求取,本例中为930 s.
紧迫危险仿真图见图6.FTID为1 642 s,此时直航船应采取最有效避碰手段.
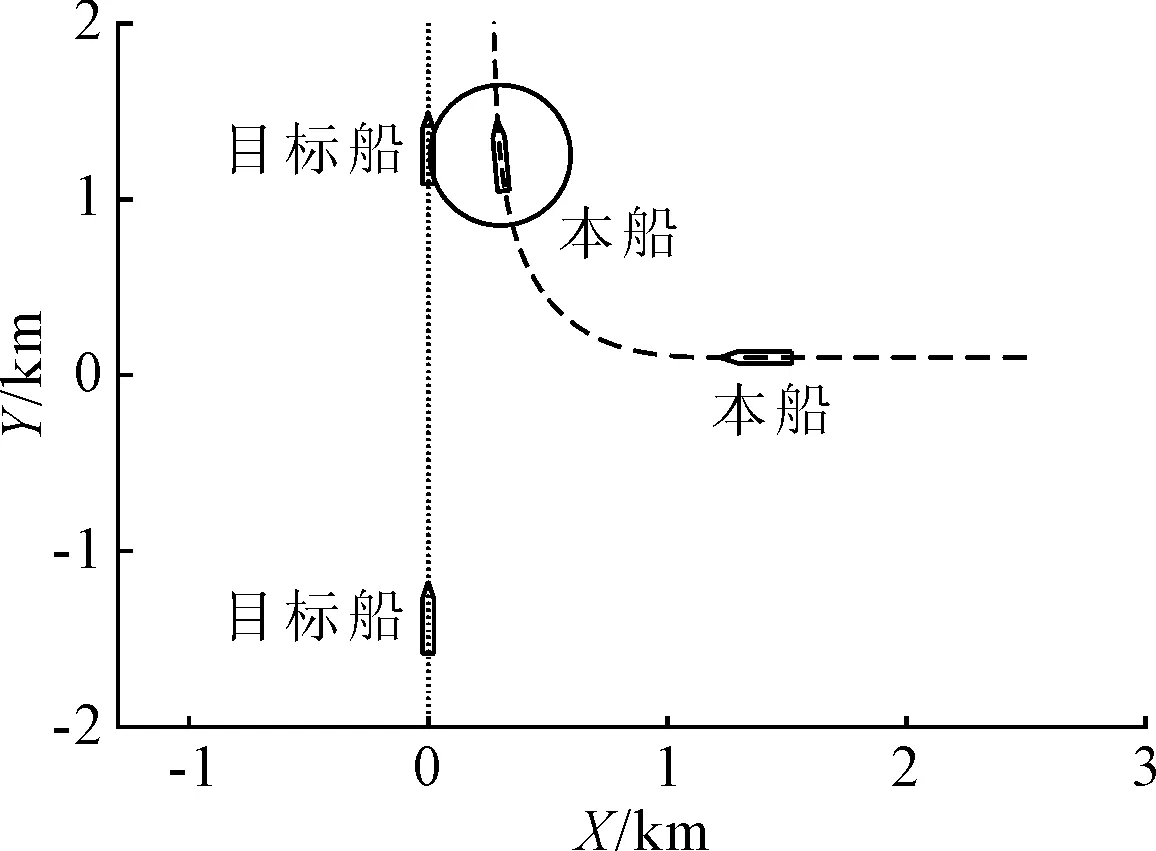
图6 交叉相遇直航船FTID时刻避让
追越局面预设不同改向角度的最晚避碰行动时间点见图7.

图7 追越中直航船不同改向角度的最晚避碰行动时间点
由图7可知,在该会遇态势下:
1) 按3.3的方法2,向右为最有效改向方向.
2) FTCS之前自由行动阶段,可以采取向右转向避让的方案.
3) 同交叉相遇类似,在FTCS时刻1 221 s后,无论预设多大的改向角,无论本船如何转向,目标船都将进入本船船舶领域.
紧迫危险仿真图见图8.FTID为1 965 s.

图8 追越直航船FTID时刻避让
6 结 束 语
文中以《规则》为基本原则,总结了航海界对直航船避碰行动时机和方案的观点,在航向控制系统环境下,依靠MMG模型和模糊自适应PID控制方法仿真了的船舶改向运动过程,提出了局面要素量化理论模型和算法.基于局面要素量化模型,考虑航海实践中的各种特殊环境,充分发挥本船船长的主观能动性,提出了开阔水域良好天气条件下自适应各种情况的直航船自主避碰决策方法.
本研究可作为船舶智能航行决策、自主避碰的基础理论与方法,为其最终实现奠定基础.后续可在基于多源信息融合的数字孪生交通环境构建、航迹控制系统环境下的碰撞危险度模型、规则量化解析下的最优路径规划和真实环境下的船舶操纵性在线辨识等方面继续开展深入研究.
猜你喜欢
华人时刊(2022年7期)2022-06-05
今日农业(2021年12期)2021-11-28
舰船科学技术(2021年5期)2021-07-03
武汉理工大学学报(交通科学与工程版)(2020年3期)2020-07-27
航运交易公报(2016年6期)2016-03-05
中国航海(2015年3期)2015-11-29
学习月刊(2015年12期)2015-07-09
重庆交通大学学报(自然科学版)(2015年4期)2015-06-07
航运交易公报(2015年18期)2015-05-27
中国卫生(2014年3期)2014-11-12