直线型助力特性曲线在电动助力转向系统中的应用
2021-12-30 14:22张思怡高峰罗鹰
时代汽车 2021年24期
张思怡 高峰 罗鹰




摘 要:电动助力转向系统(EPS)具有结构简单、装配灵活等优点得到广泛使用,在现有助力特性曲线的基础上,对电动助力转向系统的助力特性曲线进行了研究。结合所选的小型汽车的参数,分析了电动助力转向系统中转向力和助力电流之间的关系,确定了最大目标电流,得出了合理的助力特性曲线函数。为电动助力转向系统的设计提供应用依据。
关键词:助力转向系统 转向阻力矩 助力特性曲线
Application of Linear Power Assist Characteristic Curve in Electric Power Steering System
Zhang Siyi Gao Feng Luo Ying
Abstract:Electric power steering system (EPS) is widely used because of its simple structure and flexible assembly. Based on the existing power-assisted characteristic curve, the power-assisted characteristic curve of the electric power steering system has been studied. Combined with the parameters of the selected small car, the relationship between the steering force and the assist current in the electric power steering system is analyzed, the maximum target current is determined, and a reasonable assist characteristic curve function is obtained, which provides application basis for the design of electric power steering system
Key words:power-assisted steering system, steering resistance torque, power-assisted characteristic curve
1 引言
EPS系统能否成功的两大关键技术就是助力特性和控制策略,助力特性是决定控制器控制程序的关键[1]。行驶过程中,当方向盘转动时,ECU接收到来自传感器发送的转矩信号和车速信号,然后根据助力特性曲线决定助力电机的旋转方向和提供助力的大小,使驾驶员获得辅助转向力。
EPS的工作环境多变,又相当地复杂,助力电机转矩的波动、传感器生成的噪声、复杂路况的干扰这些因素都会影响到EPS的运作,这就对EPS控制策略设计的要求大大提高。EPS的控制主要包括助力控制、回正控制以及阻尼控制[2]。EPS最基本的控制模式是助力控制,在大多数情况下,汽车都是处于助力控制模式;回正控制主要是通过克服方向盘转动的摩擦,使车轮回正恢复直线位置,从而改善EPS的回正性能;当方向盘转动位置处于死区时,阻尼控制则会通过对方向盘阻力的加重,从而使驾驶员操作方向盘稳定。由于助力控制模式约占行驶过程中95%的时间,本文主要针对EPS的助力特性曲线应用展开分析。图1为EPS控制策略框图。
2 EPS助力特性曲线的要求和特征
在EPS中,助力电机输出助力的大小随着方向盤转矩和车速变化而变化的规律,因此助力特性曲线表示在EPS中助力电机所提供的力矩和目标电流大小形成的线性关系[3]。助力特性曲线是用来调整助力电机提供的助力大小,助力电机提供的力大则驾驶员转向使用的力小,操作起来就更加轻便灵活;但是提供的力过大,就会使驾驶员感觉车子发飘,缺少路感,甚至车身不稳还容易产生安全问题,所以对于助力特性曲线的要求就是确保车辆在驻车或低速行驶时,驾驶员能轻易地转动方向盘,在高速行驶时,车子稳定不发飘,给予驾驶员一定的路感。
EPS助力特性可以实时调整助力电机提供助力的大小,影响着系统的整体性能,综合EPS的特征,所设计的助力特性应该满足以下的要求:
(1)当方向盘输入的力矩较小时,EPS不需提供助力,此时助力距为零;
(2)当方向盘输入的力矩处于较小的范围内,可提供较小的助力,为保持较好的路感;
(3)当方向盘输入的力矩处于较大的范围内,需要提供较大的助力,以便转向;
(4)当方向盘输入的力矩达到极限时,需提供最大的助力;
(5)当行驶车速不断提高时,提供助力的大小应相应地减小。
EPS助力特性曲线有三种常见的助力特性曲线:直线型、折线型、曲线型,如图2所示。图中,无助力区:0≤<区;助力变化区:≤<区;助力不变区:≥。
(1)直线型助力特性曲线的函数表达式为(图2a):
(1)
公式(1)中,是电机的电流;表示电机输出的最大电流值;是助力特性的梯度,即在不同速度下的助力直线的斜率;是方向盘转动时的输入力矩;为EPS刚开始助力时,方向盘的最小力矩;是EPS助力最大时,方向盘的输入力矩。
(2)折线型助力特性曲线的函数表达式为(图2b):
(2)
公式(2)中,、是助力特性曲线的梯度,即在第一段和第二段的直线斜率;是助力特性梯度由变为时,方向盘的输入力矩。
(3)曲线型助力特性曲线的函数表达式为(图2c):
(3)
曲线型助力特性曲线对比前面两种曲线,有线形平滑、准确并连续助力的效果,但是表达式复杂,计算速度慢,不适合实时调节;直线型助力特性曲线可以看作是最容易控制的;折线型助力特性曲线位于两者中间,并且折点处会存在隐患。
3 EPS助力特性曲线函数的应用
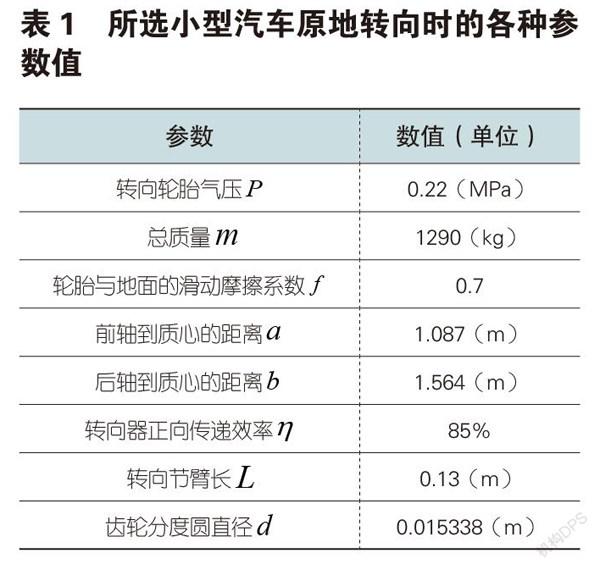
选择某款小型汽车原地转向时的相关参数作为EPS系统设计中直线型助力特性曲线函数的应用,如表1所示。
在原地时,汽车的转向阻力矩最大,经多次测量,得到汽车在路面上的最大转动阻力距即原地转向力矩经验公式为:
(4)
上式中,是汽车轮胎与路面间的滑动摩擦系数;是转向轴的阻力,单位是N;是轮胎的压力,单位是MPa。其中,通过整车的受力分析可以得出转向轴的阻力的公式:
(5)
上式中,是汽车的重力,单位是N;是汽车前轴与质心间的距离;是汽车后轴到质心的距离,和的单位均为m。因此,可以计算出汽车的转向横拉杆上所需力的最大值,单位是N,公式为:
(6)
上式中,是汽车的转向节臂长,单位是m。可以計算出转向柱杆的转向力矩,单位是N·m,公式为:
(7)
上式中,是齿轮齿条式转向器的齿轮分度圆直径,单位是m,是转向器的正向传递效率。
EPS的助力特性应满足,当方向盘转动时的输入力矩小于一特定值(通常取1N·m)时,EPS所提供的助力大小为零,即不为驾驶员提供助力,以防转向操作过轻;但是驾驶员转动方向盘的手力是有最大限度的,即方向盘输入的最大转向力矩也不可以太大。假设在本次设计中,车辆在做原地转向操作时,驾驶员的最大手力是40N,那么此时方向盘输入的最大转向力矩为:
(8)
上式中,是人手作用于方向盘上的力,单位是N;是方向盘的半径,单位是m,取方向盘半径为0.175m;即经计算可得7N·m。
因此,当车辆在原地转向时,助力电机可提供的最大转向力矩为:
(9)
经计算可得:15N·m。因为本设计选用的是直线型助力特性,因此可根据、、计算出原地转向时的最大助力比:
(10)
原地转向时,最大助力比为2.5,助力电机可以提供较大的助力,以便驾驶员转向轻便,符合设计的要求。
在式(1)中,助力特性曲线的梯度,随着车速的增加而减小。
(11)
上式中,、都是系数,其大小取决于所选的车型及EPS。本文中取3.33,取0.01。方向盘的最小力矩为1N·m,即转向力矩为1N·m时,助力电机开始提供助力;7N·m,即转向力矩大于时,助力电机提供的助力保持不变;助力电机提供的最大助力距为15N·m;当行驶车速不断增大,提供助力的大小应随之不断减小,所选小型汽车直线型助力特性曲线函数表达式为:
(12)
4 结语
采用模糊PID控制策略,运用Proteus软件用于调试所设计的EPS控制系统,按照所设计的直线型助力特性曲线,以及需要达到的控制目标进行仿真。
(1)当时,EPS不需要提供助力,电机不工作,助力矩为0。T=+0.7N·m(+代表方向盘左转,-代表方向盘右转,左转右转结果一致)助力电流为0;
(2)当时,助力电机提供助力呈线性增长,使转向轻便。通过对比转矩为3.1N·m和5.2N·m两个数据的仿真结果,电机的助力电流随转矩增加而增大;
(3)当时,转矩极限值为7,助力大小不变,助力电流输出的最大值约为20A;符合汽车转向系统助力特性要求。
基金项目:本论文为 2021年江苏省大学生创新创业训练计划项目《小型汽车电动助力转向控制系统设计》的研究成果。项目编号:202112056035Y。
参考文献:
[1]陈奎元,马小平,季学武.电动助力转向系统控制技术的研究[J].江苏大学学报(自然科学版),2004(01):21-24.
[2]栗明,邓召文.电动助力转向系统仿真与控制策略研究[J].汽车实用技术,2017(10):167-170.
[3]王望予.汽车设计.第四版[M].北京:机械工业出版社,2016,112-156.