多旋翼无人机二维超声波测风算法研究*
2022-01-06 08:36周川川李傲梅
舰船电子工程 2021年12期
周川川 李傲梅
(陆军炮兵防空兵学院信息工程系 合肥 230031)
1 引言
如何提高超声波测风传感器测量精度一直是超声波测风领域的研究热点,但其应用领域多是对固定点位风场二维水平风信息的长期测量。对于采用二维正交测风阵列结构布局的二维超声波测风设备,其工作前,需将设备按要求进行“调平”和“对北”,“调平”是指将二维测风阵列调成水平状态,“对北”是指借助指北针等辅助器材让设备对正北向。“调平”和“对北”是二维超声波测风传感器发挥灵敏优势、实现对水平风速及风向准确测量的基础,而旋翼无人机由于受气流扰动、机架震颤、机体摇摆等因素影响,悬停状态下不能时刻保持平衡状态,如若将二维超声波测风传感器安装于无人机平台,势必影响超声波测风传感器的测量准确性。
为将二维超声波测风传感器与多旋翼无人机的优势结合,以实现对空中原位水平风场信息的准确测量,本文从超声波测风原理着手,通过对三维超声波测风传感器系统测风原理分析,基于旋转矩阵原理,提出一种机身倾斜情况下,二维超声波测风传感器也能完成对水平风测量的方法,为多旋翼无人机二维超声波测风方案的实现提供算式依据。
2 超声波测风基本原理
超声波是频率高于20000Hz的声波,具有指向性好,穿透能力强,能量较集中等特点,相较于气体,其在固体及液体中传播距离较远,在测距测速、工业探伤、医用、清洗、杀菌消毒等领域均有较为成熟的运用。
2.1 超声波特性
1)衰减特性
能量衰减是超声波传播时的固有特性,衰减程度同自身频率及传输介质均相关,在理想的空气中,扩散现象是超声波能量衰减主要因素,超声波的能量和传输距离成反比的关系[1~2]。控制衰减程度有助于提高其应用领域测量范围,实验表明在空气中超过1m的传输距离时,其能量衰减较快,200kHz超声波在0.1m~0.5m能维持在10%左右的衰减幅度[3]。
2)传播特性
超声波传播速度主要受温度、湿度、压强等影响,如在一些应用领域,常用温度补偿方式提高超声波测量的准确性,所以在使用超声波进行测量时应该尽量用超声波在空气的实际速度作为参数,如超声波在风速测量的的波速表示为

其中r是比热比,p为压力,ρ为密度,超声波在20°C的空气中进行传播时,速度约为343.59m/s。
2.2 测量风速基本原理
超声波的发射与接收是通过超声波传感器(亦称超声波换能器或超声波探头)来完成的。而超声波传感器就是利用超声波的特性研制而成的一种传感器[4],其主要由压电晶片组成,收发独立型的超声波传感器组工作时,一个传感器发射超声波,则对应的传感器则负责接收超声波。
由于空气中传播时顺风与逆风方向传播的速度不同,所以对于收发一体的超声波传感器,距离固定后,接收到发射波的时间也不同,形成一个时间差值,这个时间差值与待测风速具有线性关系[5]。
如图1所示,设传感器1到传感器2的方向为风向,风速为V,超声波传播速度为Vu,传感器距离为d,超声波由传感器1到传感器2的传播时间为t12,传感器2到传感器1的时间为t21,则有:


图1 超声波检测风速原理
从式中可以看出风速的测量没有包含影响风速测量的超声波传播速度Vu(不同环境下数值不同),即避免了温度等其他因素对系统测量精度的影响[6]。
2.3 测量风向基本原理
如图2所示,设两对超声波传感器距离均为d,x轴方向的传输时间分别为t12和t21,y轴方向的传输时间分别为t34和t43,风速为V,x轴方向的风速分量为Vx,y轴方向的风速分量为Vy,超声波传播速度为Vu。根据式(1)可得:


图2 二维正交阵列检测风向原理
设x轴正方向为0°,角度按逆时针方向增大,则风向:

化简并求反函数:

随着风向的变化,可得某时刻风向为

当t12≤t21且t34≤t43,k=0 ;当t12>t21且t34>t43,k=1 ;当t12>t21且t34<t43,k=1 ;当t12<t21且t34>t43,k=2 ;
3 三维超声波阵列三维风测量原理
根据超声波测风基本原理知,一对超声波传感器可测得其所在直线上的风速,则三对超声波传感器经过一定设计可实现对三维风的测量。
3.1 建立三维风模型
如图3所示,在空间直角坐标系中,y轴指向正东方向,为一个风速矢量,风速矢量的映射线与正东方向的夹角α为风向的水平偏角,风速矢量与水平面的夹角β为风向的垂直偏角,可以用风速大小、水平偏角α、垂直偏角β来表示三维风。水平偏角α的范围为,垂直偏角β的范围为为了便于计算模型的建立,本文规定(x,y,z)象限为正风向的象限[7](以下公式中用V代表风速大小

图3 三维风模型示意图
3.2 超声波测风设备垂直正交阵列设计
如图4所示,垂直正交测风阵列中,有PP'、QQ'、RR'共计6个传感器,每组所在直线分别对应空间坐标系的三个轴。L为每对传感器中探头之间的距离,三组传感器所在的直线与空间直角坐标系的三条轴重合,其中,y轴指向正东方向,V为三维风[8]。

图4 三维超声波垂直正交测风阵列
3.3 时差法测风
将风速矢量沿着三个坐标轴正交分解为Vx、Vy、Vz,根据式(1),Vx、Vy、Vz的表达式如下:

根据正交分解原理,原始风速与分解风速之间的关系如下:

由式(11),结合式(8~9),实际风速归一化公式如下:

由图4,水平偏角α为风速矢量的映射线与正东方向的夹角,垂直偏角β为风速矢量与水平面的夹角,那么根据直角三角形勾股定理可知,水平偏角α只与水平分量Vx、Vy有关,垂直偏角β与垂直分量Vz以及水平分量Vx、Vy的合分量有关,其角度解析式如下:


3.4 倾角存在下的风速和风向值变化分析
1)风速变化情况
如图5,当三维测风阵列相对于空间直角坐标系产生倾角,由立方体对角线理论知风速V不变,即:


图5 三维垂直正交测风阵列倾斜示意图
2)风向变化情况
倾角存在时,V在x'y'z'及xyz上的投影不同,故不能根据Vx'、Vy'、Vz'通过式(13)、(14)直接求得风向,需首先根据矩阵旋转理论通过Vx'、Vy'、Vz'推导出Vx、Vy、Vz,而后可依据前述时差法测量三维风向方法计算出风向值。
4 二维超声波阵列水平风测量方法研究
风主要是指空气运动时的水平分量,风速是指空气在单位时间内移动的水平距离,风向是指风水平吹来的方向,所以在超声波测风技术的具体应用中,从成本考虑出发,多选用二维测风阵列用于对水平风的测量[9~11]。根据超声波测风原理,二维测风阵列需保持水平状态才能测得水平风场准确数据,阵列倾角对测量精度影响较大。为研究影响情况,现从三维坐标系倾角情况着手进行分析。
1)构建坐标系倾角模型
首先基于二维测风阵列构建直角坐标系,其中正交的超声波传感器分别与空间直角坐标系的x轴及y轴重合,对直角坐标系正直向上作垂直分量,构建阵列坐标系x'y'z',与空间直角坐标系的z轴重合。倾斜使得二维阵列产生俯仰角θ、翻滚角φ及偏航角ω,如图6所示。
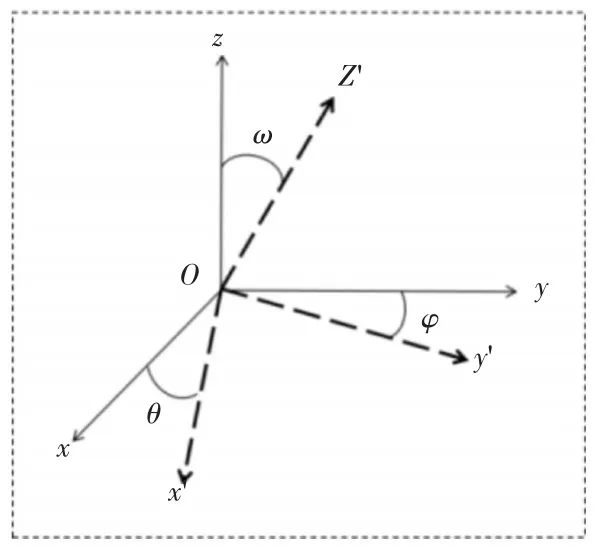
图6 空间直角坐标系与阵列坐标系
2)三维坐标系旋转矩阵
根据三维坐标系空间旋转变换相关理论[12~13],结合图7,现规定从空间直角坐标系xyz到阵列坐标系x'y'z'的顺序:先绕x轴旋转φ,而后绕旋转后的y轴旋转θ,再绕第二次旋转后的z轴旋转ω,即每一次旋转都是上一次旋转的叠加。相应的,从阵列坐标系x'y'z'到空间直角坐标系xyz的顺序刚按相反旋转顺序得到。其中最右图中的x2y2z2即为x'y'z'。对于z,y,x方向的旋转都是按照右手系定则:大拇指指向轴线方向,四指方向为旋转的正方向。

图7 三维坐标系空间旋转变换示意图
根据矩阵理论,从空间直角坐标系到阵列坐标系的旋转矩阵有如下定义:


根据旋转矩阵左乘原理,阵列坐标系到空间直角坐标系的旋转矩阵为

设x'y'z'坐标系下测量值为(OA'OB'X),其中X为z'轴方向未知值,则其与xyz坐标系中各分量对应关系为

结合图5,理论上,水平风速值OD由分解风速值OA及OB通过三角函数关系计算得出:

根据式(20)、(21)看出影响OD的因素主要包括θ、φ、ω及阵列垂直分量X的影响,其中θ、φ、ω取值由机载陀螺仪测得。
考虑到无人机通过自旋可以修正偏航角,本文提出首先根据机载陀螺仪测得的偏航值,通过使无人机自旋让偏航值ω归零;另外考虑到机体坐标系x'y'z'的垂直分量X未知,而理论上水平风速最大时,机体倾斜最大,基于此建立线性关系,对X进行赋值。本文主要对以下算法进行实验验证。

其中,∅为机体姿态倾斜角,∅max为机体的最大姿态角限幅,Vmax为旋翼无人机允许的最大水平风速,V为实际水平风速。
5 实验结果与分析
本文实验主要利用Matlab软件对算法进行核算。关于X与OD的关系,主要从以下方面来考虑。
1)旋翼无人机的最大姿态角限幅
根据当前多旋翼无人机发展现状,通用的无人机有效适飞风力等级一般为六级(10.8m/s~13.8m/s),最大姿态角限幅一般为20°,如图8所示。
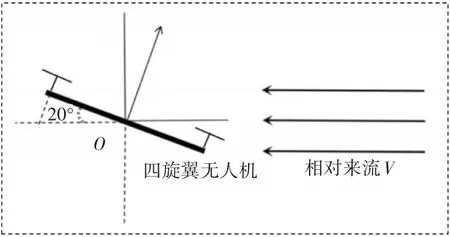
图8 多旋翼无人机迎风倾角示意图
2)实际应用领域对风场数据的测量范围及精度要求
为某型固定翼飞机安全起降提供风场信息数据是多旋翼无人机超声波测风系统的研究初衷,其要求系统的最大测风力范围为13m/s,精度误差小于0.5m/s。
根据如上信息,实验中将最大水平风力Vmax设定为15m/s,测量精度0.5m/s,最大姿态角限幅∅max为20°,偏航角ω的取值范围0~45°,同时考虑到俯仰角θ、翻滚角φ同样受最大姿态角限幅制约,为适当扩大测量范围,规定θ、φ取值为实际倾斜值∅,即二维正交阵列的两测量值相等:

结合式(25)~(28),求取了风速计算值OD与给定风速值V之间的差值Δ,通过分析Δ以验证算法可行性。将算法编程输入Matlab软件,随着水平风速V及偏航角ω的增加,计算后得到一系列差值Δ相关数据,如表1所示。

表1 航角归零及线性赋值算法误差分析表
表1中,横轴为给定水平风速值V,取值范围为0~15m/s,纵轴表示偏航角ω,取值范围为0~45°,其中V及ω的步长分别为1m和1°。
从表1中可以看出,未着色区域Δ值均小于精度值0.5m/s,浅色区域Δ差值在0.5~1m/s之间,深色区域Δ差值大于1m/s,以此得出在风速小于13 m/s且偏航角归零情况下,计算水平风速值与给定水平风速值之间误差在许可范围内,风速值在13m/s~15m/s时,误差小于1 m/s。
6 结语
本文针对倾斜情况下多旋翼无人机二维超声波测风系统不能准确测量水平风场信息的问题,根据机载陀螺测得的数据,提出系统每次工作前需首先利用无人机自旋将偏航角归零,同时对未知的垂直分量值通过线性关系进行赋值的方法,并结合软件进行了实验验证。实验证明,对于正交二维超声波测风传感器发生倾斜情况下,在一定的倾斜角度及风速范围内,根据旋转矩阵理论,可以通过偏航角归零及给垂直分量线性赋值的方式,近似求出水平风速值,但也存在由于搭载的无人机平台需自旋使偏航角归零后,测得的数据才可用于计算,故风速识别周期较长的缺点,但此方法能够保证测量精度基本满足实际的需要,具有一定的实用价值。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
语数外学习·初中版(2020年3期)2020-09-10
新课程·中学(2019年7期)2019-09-17
少年文艺·我爱写作文(2019年8期)2019-09-12
初中生世界·九年级(2019年6期)2019-08-15
科学与财富(2019年16期)2019-01-04
物理教学探讨(2018年1期)2018-02-13
中学课程辅导·教学研究(2017年11期)2017-09-23
小猕猴学习画刊(2015年10期)2015-10-26
中学生数理化·高考版(2008年2期)2008-11-01