
基于输出反馈和滑模控制的一类二阶非线性系统有限时间镇定方法
2022-01-08 12:25孙训红陈维乐都海波李世华
控制理论与应用 2021年11期
孙训红, 陈维乐, 都海波, 李世华
(1.合肥工业大学电气与自动化工程学院,安徽合肥 230000;2.东南大学自动化学院,江苏南京 210096)
1 引言
众所周知,对于控制系统,收敛性能和抗干扰性能是重要的性能指标,这也是工程师在设计控制器时所关注的重点.注意到大多数控制器设计满足局部利普希茨条件,这意味着闭环系统是渐近稳定的,收敛速度只能做到指数收敛.为了提高收敛速度,文献[1-5]等相继提出并发展了有限时间控制算法,系统状态将在有限时间内收敛到平衡点.目前主要的有限时间控制算法有齐次性法[3]、加幂积分法[4]和终端滑模算法[5]等.其中,齐次性法控制器结构简单且易于设计[6-7],但是在高阶系统中是一种存在性设计而不是构造性设计,抗干扰能力难以定量分析[3].而加幂积分法一方面能够结合反步设计思想,另一方面可以通过显式构造李雅普诺夫函数,定量分析抗干扰性能,因此得到了广泛应用[4,8-11].终端滑模方法结合了传统滑模控制算法和有限时间算法,设计了非线性滑模面,从而使得状态在到达滑模面后,能够沿着滑模面有限时间内收敛到平衡点[5,12].特别地,如果将有限时间控制算法定义为能够使系统稳定且系统状态有限时间收敛的算法,滑模算法[13-14]也可以看成是一类有限时间控制算法.
文献[4]提出并利用加幂积分技术构造了非光滑连续状态反馈控制器,对一类广泛的本质非线性系统实现了全局渐近镇定.随后,结合加幂积分技术,文献[15]考虑了一类带不确定动力学的非线性系统的有限时间镇定问题.文献[16]基于逻辑切换,实现了一类不确定非线性系统的自适应有限时间镇定.此外,文献[17]针对一类带匹配不确定非线性动力学的系统,提出了一种时变反馈调节方法,可以在预定的时间内对系统状态进行调节.值得注意的是,上述的控制器设计方法都是基于全状态反馈的,这意味着系统的所有状态都必须是已知的.而在实际中,有一些场合,如电机系统,由于技术限制或成本考虑,采用无速度传感器实现其控制[18-19].因此,基于输出反馈的有限时间控制算法值得深入研究.在文献[20]中,首次实现了双积分系统的有限时间输出反馈镇定问题.随后,在文献[21-22]中,利用递归设计方法和齐次控制方法,研究了一类高阶不确定非线性系统的全局有限时间输出反馈镇定问题.
文献[20-22]等尽管已经考虑了系统的不确定动力学,但是没有考虑外部干扰的影响.在实际工程中,外部干扰是不可避免的.考虑到系统的输出反馈需要对系统状态进行观测,而外部干扰将影响观测器的收敛性.对于有界干扰,超螺旋算法具有良好的收敛性能和抗干扰性能,因此得到了广泛的研究和应用[23-26].然而,由于不确定动力学的存在,无法“独立”证明观测器的收敛性.此时,“分离原理”不适用.因此本文采用了“非分离原理”,主要思路如下.首先,设计了一种状态反馈控制器,实现了系统的有限时间镇定.然后,考虑到只有系统输出可知的情况,设计了一种基于状态观测器的复合有限时间控制器,实现了系统的有限时间输出镇定.此外,本文的有限时间观测器与控制器采用了状态的非连续函数,这导致在通常意义下无法解释系统解,而是Filippov意义下的解[27].
本文的结构如下:第2节介绍了被控系统的模型,以及预备知识,包括一些有用的假设、定义和引理;第3节是全文的主要内容,分为3个步骤并在开始时作了详细介绍;第4节给出了一个仿真实例;最后,第5节对本文进行总结.
2 问题描述和预备知识
2.1 问题描述
考虑一类具有不确定动力学和未知外部扰动的二阶非线性系统
其中x=[x1x2]∈R2是系统状态向量,y ∈R是系统输出,u ∈R为控制输入,f1(·)是系统非匹配未知非线性动力学,f2(t,x,d)= ¯f2(t,x)+d(t), ¯f2(t,x)和d(t)分别是控制输入通道中的不确定动力学和未知外部干扰.
本文的最终目的是为非线性系统(1)设计一个基于输出反馈的控制器,实现闭环系统的有限时间镇定.控制器设计和稳定性分析面临以下难点:i)系统存在不确定的非线性动力学和未知的外部扰动;ii)对于系统的状态,只有x1作为系统的输出是可测量的.一些假设如下.
假设1 对于系统(1),有两个已知的非负常数a1,a2使得

注1参考文献[21-22,28-30]等均有类似的假设.文献[21-22]不考虑外部有界干扰,而本文假设匹配不确定动力学¯f2(t,x)和未知外部干扰d(t)都是全局有界的.文献[28-29]的非线性动力学形式是已知的,但是假设条件更加宽松.而对于非匹配干扰f1,其约束条件直接参考了文献[30]的假设条件.实际上,本文也可以看成是对文献[30]的部分结论进行了基于输出反馈的扩展.此外,文献[30]中对于Buck型电路的应用,也体现了上述假设的合理性.
2.2 预备知识
定义1(Sig函数)


引理1[2]考虑如下系统:

其中f(·):Rn →Rn是一个连续函数.假设存在一个正定连续函数V(x):U →R,有实数c>0和α ∈(0,1),并且存在一个包含原点开区域U0⊂U使得˙V(x)+c(V(x))α≤0,x ∈U0{0}.那么V(x)将在有限时间内到达0.此外,有限收敛时间T满足

引理2[5]如果m>1,那么

3 主要结果

通过坐标变换,将本文的控制目标转化为系统(6)的有限时间输出镇定.
本节分为3个步骤.
步骤1 对于系统(6),设计了状态反馈控制器来实现全局有限时间镇定.
步骤2 考虑到z2不能直接测量,设计了一个观测器来估计z2.这种观测器的形式是基于超螺旋观测器.但是,由于非匹配不确定动力学g1的存在,不能单独证明观测器的有限时间收敛性.
步骤3 步骤1和步骤2表明系统不能使用“分离原理”进行输出反馈控制.因此,本文同时进行控制器和观测器的稳定性分析.通过设计总李雅普诺夫函数,证明了总闭环系统的有限时间稳定性,同时实现了z2的有限时间估计和系统的全局有限时间输出镇定.
3.1 状态反馈控制器设计
定理1 对于系统(6),在假设1条件下,如果状态反馈控制器设计为


这意味着系统的状态会在有限时间内收敛到原点.
3.2 状态观测器设计

定理2 对于系统(6),在假设1条件下,如果状态观测器设计为式(22),
·在李雅普诺夫函数(24)下,W沿系统(23)的导数满足式(42).
·如果a1=0,则存在合适的增益k1,k2>0实现状态的有限时间观测.
证 构造李雅普诺夫函数


接下来,本文在两种情况下估计不等式(26)的最后一项.



这实际上是超螺旋算法(super twisting algorithm,STA).因此,与已有超螺旋算法的李雅普诺夫函数法证明[32-34]不同,本文设计了一个新的李雅普诺夫函数,提供了一种新的、简洁的STA算法的证明方法.
注3根据定理1和定理2,如果a1=0,可以使用“分离原理”实现系统(6)的有限时间输出镇定.具体地,首先通过定理2,在有限时间T1后得到z2的估计.之后,输出反馈控制实际上变成了状态反馈控制,由定理1可知,在T1+T2之后,系统将收敛到0.但本文主要考虑a1>0的情况.在这种情况下,“分离原理”并不适用.因此,接下来本文将利用“非分离原理”来解决有限时间输出镇定问题.
3.3 基于输出反馈的有限时间控制器设计
当不能直接获得状态z2时,上述状态反馈控制不再适用.此时,使用如下输出反馈控制器:

定理3 对于系统(6),在假设1条件下,若将输出反馈控制器设计为式(44)且状态观测器设计为式(22),则存在适当的正增益β1,β2,k1,k2和L使得整个闭环系统有限时间输出镇定.
由于摆杆在运动过程中会受到各种扰动因素的影响.为提高摆杆的控制精度,下面采用自抗扰控制方法设计控制倒立摆摆杆角度的控制器.



其中ˆρ是一个正的常数.
基于式(57),U(z,e)会在有限时间内收敛到0.因此,V(z)和W(e)都将在有限时间内收敛到0,这意味着本文同时实现了系统状态的有限时间估计和系统的有限时间输出反馈镇定.
回到最初的问题,即系统(1)的有限时间输出反馈镇定.根据定理3和坐标变换(5),可以得到以下结论.
定理4 对于系统(1),在假设1条件下,若将输出反馈控制器设计为

则存在合适的增益β1,β2,k1,k2和L使得整个闭环系统有限时间稳定.证毕.
4 仿真
在仿真中,假设系统(1)的不确定动力学和未知外部扰动满足

则|f1|≤1.5|x1|1/2和|f2|≤3,满足假设1.控制增益分别取β1=15,β2=3,k1=20,k2=15和L=2.为了更好地表现系统能够全局有限时间输出镇定,选择较大的输出初值,即y(0)=x1(0)=100.其它初值选取为x2(0)=0, ˆx1(0)=0, ˆx2(0)=0.仿真结果见图1-3,其中图1是系统状态x1和x2,图2是系统状态x1及其估计ˆx1,图3是系统状态x2及其估计ˆx2.从图1可知,系统状态在有限时间内收敛到原点;由图2和图3可知,在系统状态镇定的同时,实现了状态的有限时间观测.

图1 系统状态x1和x2Fig.1 System’s states x1 and x2

图2 系统状态x1及其估计ˆx1Fig.2 System’s state x1 and its estimate ˆx1
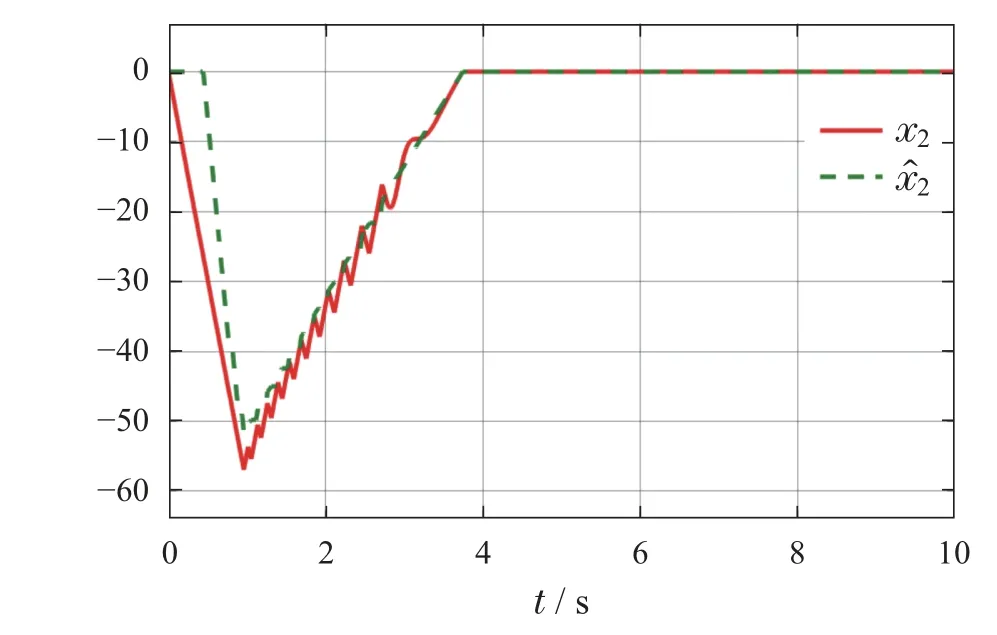
图3 系统状态x2及其估计ˆx2Fig.3 System’s state x2 and its estimate ˆx2
5 总结
本文研究了一类具有不确定动力学和未知外部扰动的二阶非线性系统的输出镇定问题.当系统状态可测时,提出了一种全局状态反馈有限时间控制器.当只有系统输出可测时,采用“非分离原理”,构造了状态观测器和基于观测器的输出反馈控制器,通过李雅普诺夫函数方法,证明了整个闭环系统的有限时间稳定性.最后,一个仿真实例验证了理论的有效性.
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
火力与指挥控制(2022年6期)2022-07-25
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
黑龙江大学自然科学学报(2022年1期)2022-03-29
科学技术创新(2021年35期)2022-01-14
计算机仿真(2021年3期)2021-11-17
水下无人系统学报(2021年1期)2021-03-10
北京航空航天大学学报(2020年10期)2020-11-14
- 控制理论与应用的其它文章
- 基于扩展状态观测器的随机隐Markov正跳变系统有限时间异步控制
- 矩阵方程的分布式求解算法研究概述
- Average cost Markov decision processes with countable state spaces
- 任意相对阶下非线性切换系统的事件触发漏斗控制
- Enhanced active learning for model-based predictive control with safety guarantees
- State-flipped control and Q-learning algorithm for the stabilization of Boolean control networks