在轨实时空间目标检测算法研究
2022-01-11 12:15韩璐瑶谭婵刘云猛宋锐
航天返回与遥感 2021年6期
韩璐瑶 谭婵 刘云猛 宋锐*
在轨实时空间目标检测算法研究
韩璐瑶1谭婵2刘云猛2宋锐*1
(1 综合业务网理论及关键技术国家重点实验室,西安电子科技大学,西安 710071)(2 中国科学院上海技术物理研究所,上海 200083)
空间目标监视是保证空间活动正常运行的重要前提,利用光学设备进行光电探测是空间目标监视的重要手段之一。在天文光电深空图像序列中,恒星目标和空间目标成像特性相似,对目标检测产生干扰,因此实时稳健地进行空间目标检测有着很大的难度。文章对天文光电图像目标成像的规律进行了分析研究,提出一种基于帧间匹配的目标检测算法:首先通过形态学操作进行图像预处理,再通过帧间匹配提取特征,进而检测空间目标。FPGA与DSP硬件平台下的图像数据测试结果显示,该算法对不同工况均具有良好的检测概率和较低的虚警概率,图像处理速度可达5帧/s,具备有效性和实时性,适用于深空背景下天文光电探测系统对空间目标的实时检测需求。
目标检测 形态学 实时图像处理 可见光图像 空间遥感
0 引言
空间目标监视是对空间目标进行探测和跟踪的过程[1],对于避免空间碰撞、维护空间环境的安全有着重要意义。利用光学设备进行探测以及星上信息处理[2],要求目标检测的精度高、虚警概率低、检测速度快。空间目标的光电成像特征与深空背景有着明显的差异,但由于观测相机与目标距离远,且观测相机视场大,导致视场内出现多颗恒星,恒星的光电成像特征与目标相似,呈现弱、小的特征,会干扰对目标的检测。
为解决这一问题,国内外研究学者针对深空背景中成像的特性,提出了一系列性能优异的算法,主要有:1)在时域的角度利用多帧图像的投影关系进行检测的差分图像法[3-5]和多帧图像累加法[6-7]。这两种方法利用了空间目标运动轨迹明显、恒星运动缓慢的特征,然而当探测器移动时,恒星会产生位移,会给算法带来很大的误差。2)利用星图背景的确定性,基于参考星来检测运动目标[8-9]的三角形法[10]、多边形匹配法[11]以及栅格算法[12]等。这类方法对背景噪声大的场景适用性不好。3)利用目标运动轨迹的连续性特征来进行检测的光流法[13-17]。因其实效性不好,不适于天基系统实时的目标监视。
针对深空背景下的光电成像特点,本文分析了恒星与目标在图像序列中的特征,提取差异性,实现对目标和恒星的检测;通过图像序列的帧间匹配,分别建立目标与恒星的运动轨迹;最终根据轨迹的特异性特征,完成目标的检测与跟踪;最后,根据实测数据在特定硬件平台中的测试结果,验证了算法的准确性和实时性。
1 光电成像特征分析
在大视场的天文光电图像中,搭载在空间飞行器上的CCD相机目标呈现亮度低、面积小的星点特征。星点的运动轨迹如图1所示。
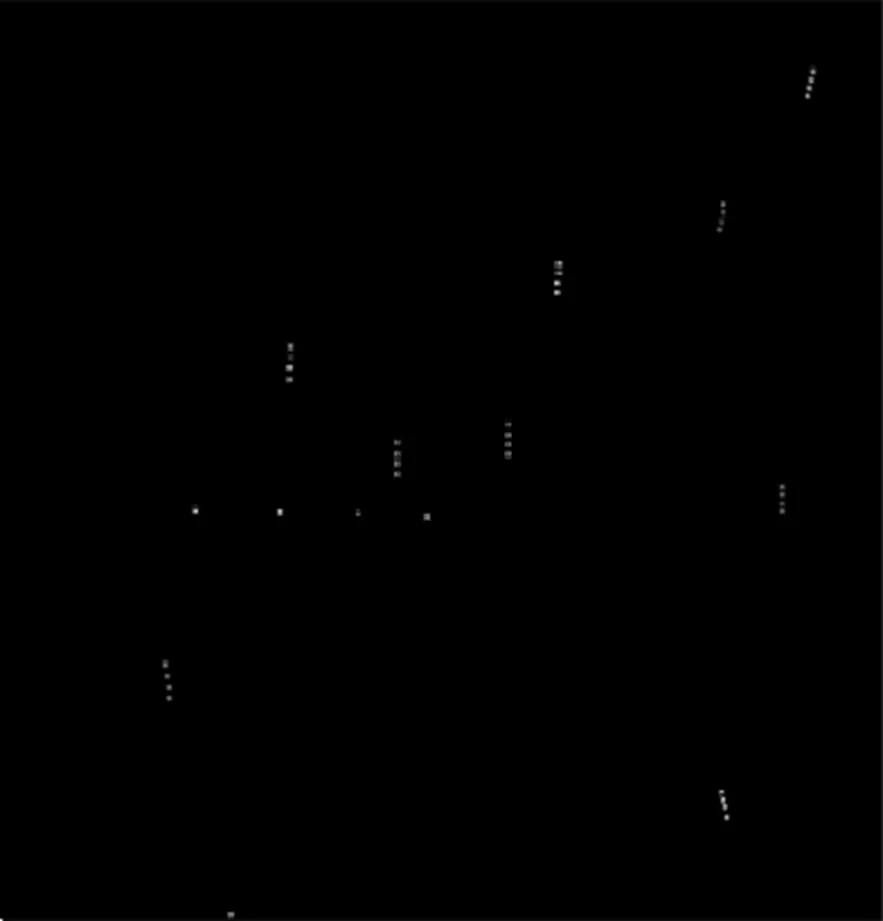
图1 星点运动轨迹
分析其成像特征和运动轨迹有以下特点:1)目标只占少量像素,呈现点目标的状态,成像具有“弱”、“小”等特征[18-19],且不具有细节与纹理。2)成像背景中有大量恒星,恒星的成像特征与目标相似甚至一致,必须依靠多帧图像才能区分目标。3)恒星距离相机较远,其运动速度与方向基本取决于相机的运动状态,众多恒星拥有相同的运动特征。4)目标与相机的距离相对恒星与相机的距离来说较近,其运动速度与方向不仅取决于相机的运动状态,还取决于与目标的距离和目标本身的运动状态。5)恒星以及目标的运动方向呈直线形,且在间隔相同帧数时,其运动距离也近似相同。6)目标运动在不同轨道时的运动状态不同,在高轨状态下,目标运动缓慢,与恒星的速度相近,但运动方向会有不同;在低轨状态下,目标运动快速,会明显大于恒星的运动速度。7)与目标相距50km以内时,开始呈现面目标的状态;且因为近大远小的特点,会呈现不同的大小形态。
因为恒星目标和空间目标在形态上的相似性,对空间目标的检测提出了更高的要求。由于目标的运动状态不可控,可能存在被遮挡甚至丢失的情况,这些特殊状态的处理对目标检测的准确度、目标质心定位的准确度有着重要的影响。
观察空间飞行器上实际搭载的CCD相机所获取的视频序列,可以发现图像由深色背景、目标、恒星三部分组成,特殊情况下会存在月亮。恒星均呈现点目标的状态,大小约为3×3个像素,灰度值分布呈现中间高、四周低的特点;目标在视野中有0~1颗,在远距离时呈现点目标的状态,大小约为3×3个像素,在近距离时呈现面目标的状态,大小可能至50×50个像素,灰度值分布呈现中间高、四周低的特点;月亮因为距离较近,大小可能达200×200像素以上,呈现面目标的状态。在时间域上对目标、恒星和月亮的运动状态进行分析,可以发现恒星均做匀速直线运动,运动方向与速度取决于空间飞行器的运动状态,因此恒星和月亮具有一致的运动方向和速度,每帧移动不到1像素。目标的运动状态未知,其运动方向与恒星运动方向不一致,每帧移动像素低至1像素,高至50像素。综合分析恒星和目标的运动状态,发现恒星的运动轨迹一致且不会互相重合,目标由于运动状态不同会呈现一条特殊的运动轨迹。因此,对运动轨迹进行计算与分析是本算法进行目标检测的重要前提。
2 实时目标检测算法
分析空间目标和恒星在成像特征和运动轨迹方面的差异,设计实现一个基于帧间匹配的实时空间目标检测算法,流程如图2所示。

图2 实时空间目标检测算法流程
首先对图像进行形态学处理,得到所有星点的基本位置;进而从基本位置开始计算得出所有星点的静态特征,包括大小和均值亮度;再通过帧间的星点匹配,得到星点的动态特征,包括运动方向与运动速度;利用目标与众多恒星的特征不同,给所有星点赋予为目标的概率值;积累一定序列后,寻找拥有最大概率的星点为空间目标,并输出结果。
2.1 形态学处理
为了分别获得目标和恒星的运动轨迹,首先要从图像中提取其位置,并用特定的特征描述记录。可将图像有效信息分为深空背景与星点两部分,此处采用二值化、形态学处理的方法进行星点的提取。
二值化的目的是将灰度图像转换为二值化图像A。设定阈值,图像中灰度值大于该阈值则置为1,否则置为0。
形态学处理的目的是将视场内存在的所有星点从深空背景中提取出来,每一个星点表示为一个连通分量。形态学操作为了提取多个连通分量[20],采用先膨胀后腐蚀的流程。
结构元素的选取对于形态学的效率和结果有着很大的影响。膨胀的目的是“增长”或“粗化”二值图像中的有效物体,此时的有效物体即视场内的所有星点。但“增长”的方式与“粗化”的宽度是由选择的结构元素来控制的,需要根据膨胀的具体目的来决定。膨胀的目的是提取每一个星点在图像中的位置,这就包括了坐标与大小;与此同时,也希望每一个可视星点是独立的。因此理想的膨胀效果是每一个星点都由不规则成像变成最小外接矩形。
采用的膨胀模板如图3所示。

图3 膨胀结构元素
图3中结构元素B1、B2、B3、B4、B5、B6阴影部分表示为0,空白部分表示1,以结构元素左下角作为准心,让结构元素遍历整幅二值化图像A,并进行卷积运算,如果结构元素中任意一个完全被A包含了,则将该位置标记为新集合的成员(如图4表示);如果没有被包含,则将该位置标记为非新集合的成员(即不变)。

图4 修改结果
在图像卷积运算过程中,修改结果在图像A中实时更新,下一步的卷积运算在更新后的图像A上运行。因此,对图像的遍历顺序也会影响膨胀的结果,此处选择图像的遍历方向为从上到下、从左到右。图5显示了二值图像按照此方式膨胀的结果。

图5 膨胀示意
膨胀后,每个星点都是一个比较规则的连通分量,其右下角是矩形。腐蚀的操作则可以把二值化图像中的物体进行缩小或“细化”。此时的目的是把每一个矩形变成一个像素点,这样在遍历图像一次之后,图中有效点的个数就是视场内星点的个数。为了实现这个腐蚀操作,选取如图6所示的3×3像素的结构元素。
图6 腐蚀结构元素
图6中,白色部分表示为1,阴影部分表示为0。以中心为准心,在图像上进行卷积运算,如果结构元素与图像A不一致,则把此结构元素覆盖的地方置为0,否则图像不变。腐蚀的结果会实时对图像A产生修改,并对下一次的卷积运算产生影响。图像的遍历顺序会对腐蚀结果有影响,其方向一般选取和膨胀方向一致。本算法选择遍历顺序为从上到下、从左到右。
形态学操作后,全图得到多个孤立的像素点,每一个代表了一个星点,这是对星点位置的初始判断。在腐蚀图像的基础上进行全图扫描,即可得出所有星点的外接矩形的右下角坐标。
2.2 特征提取
根据深空图像的成像特点,分别描述星点的静态特征和动态特征:静态特征描述包括大小和均值亮度;动态特征描述为运动矢量,由运动方向和运动速度组成。本章节将在形态学计算结果的基础上进行静态特征的提取。
对星点大小的描述可以通过外接矩形的高度和宽度完成。计算思路为从每一个星点的右下角坐标出发,根据膨胀图像的连通性,向左向上寻找至像素值为0的点,作为外接矩形的左上角位置,具体思路如图7所示。具体步骤为:


4)根据右下角坐标和左上角坐标进行高度、宽度和大小的计算。计算公式为


对星点亮度的描述通过均值亮度完成。遍历星点外接矩形内所有像素,对二值图像中非零点的灰度值进行统计,然后计算均值,公式为
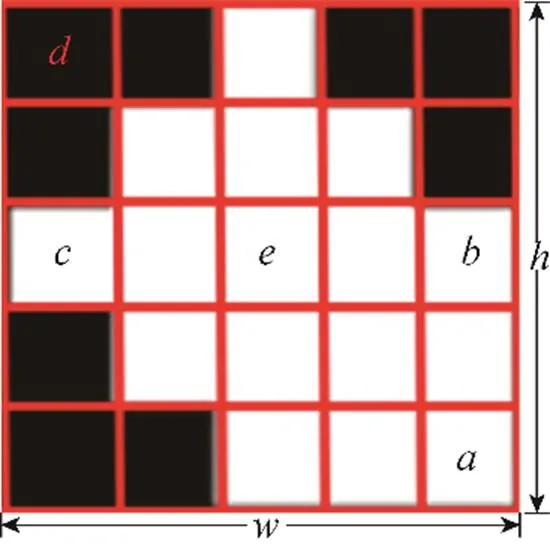
图7 计算思路示意
考虑到月亮在视场中的运动状态与恒星一致,但两者大小具有显著差别。为了防止在目标检测时把月亮误判成目标,并降低虚警概率,可在此阶段对于月亮进行判别并标记,后续算法忽略月亮即可。
此部分算法在消除背景噪声、处理相机坏点方面作用显著。该阶段对所有的星点、噪点、坏点均计算了高度与宽度,对于孤立的坏点或者椒盐噪声,多数情况下会表现出孤立的亮点,其高度与宽度均为1,因此可通过高度或宽度达不到有效阈值来进行滤除。
2.3 帧间匹配
对星点动态特征的描述需要借助相邻两帧图像完成。
根据恒星运动速度缓慢的特点,在前后帧中恒星的位置变化小于1像素,因此很容易根据前帧图像中恒星星点的位置确定其在后帧图像中的大概位置。所以,首先以前帧图像为基础,寻找距离前帧图像中星点欧氏距离最小的后帧图像中的星点;然后以后帧图像为基础,寻找距离后帧图像中星点欧氏距离最小的前帧图像的星点。在此阶段,除两种异常情况外,均会达成一对一的匹配。两种异常情况如下:
1)恒星在前帧中出现,后帧因为恒星移动消失在视场中。具体表现为后帧图像的恒星星点数少于前帧的恒星星点数,在匹配时,前帧图像的2颗星点均会匹配到后帧图像的1颗星点。因此,匹配不成功。
2)恒星在前帧中未出现,后帧因为恒星移动出现在视场中。具体表现为前帧图像的恒星星点数少于后帧的恒星星点数,在匹配时,后帧图像的2颗星点均会匹配到前帧图像的1颗星点。因此,匹配不成功。
算法需要对以上两种情况进行判断,并完成相应的处理。判断方式即计算匹配不成功的星点与图像边界的距离,当小于一定阈值时,即可认为其是一个边界点。
然而,目标的运动速度是未知的,由其运动轨道决定。当目标的空间位置与空间飞行器距离较远时,在图像序列中显现的运动速度较慢,帧间匹配情况与恒星星点的匹配情况类似。若目标的空间位置与空间飞行器距离较近,在图像序列中显现出较快的运动速度;或者目标的运行轨迹与恒星的运行轨迹在某一帧中发生重合,此时也无法造成确定的匹配,会出现前帧1颗星点匹配到后帧2颗星点,或者前帧2颗星点匹配到后帧1颗星点的情况。对此情况的辨别是帧间匹配中的难点。根据恒星和目标运动的连续性和规则性,以及其形态(包括大小和亮度)变化的连续性,可以确定无论是恒星还是目标,其静态特征和动态特征在短时间内具有稳定性,因此可以通过相似性度量筛选出确定的匹配对。
综上分析,为了对星点的大小、亮度、运动矢量(可以分为运动方向和运动速度)进行统一的比较,需要首先确定这四个特征进行相似性度量时的权重,分析过程如下:
1) 形状作为依据。因为恒星的大小表现基本一致,目标的大小可能与恒星一致,但也可能会明显大于恒星,因此形状可以作为目标检测的依据,但权重不宜过高。
2) 亮度作为依据。因为深空环境的复杂性以及CCD相机成像的特点,亮度的权重应设为最低。
3) 运动矢量作为依据。由于目标与恒星在运动状态上明显不同,这是能够区分两者最有效的方法;同时,恒星在图像序列中的位置改变是由相机的移动引起的,因此恒星的运动状态几乎一致,这也使得目标的运动状态尤为突出,因此权重可设为最高。运动方向与运动速度的权重可以根据不同工况来设置,考虑到高轨工况目标运动缓慢,极有可能仅运动方向不同,因此运动方向的权重设为最高;而低轨工况目标运动速度较快,因此运动速度的权重设为最高。
记星点大小的权重为s,星点亮度的权重为L,星点运动方向的权重为O,星点运动速度的权重为W。各权重间的关系为

最后,对2颗星点的大小、亮度、运动矢量特征与1颗星点的大小、亮度、运动矢量特征均进行差值计算,比较2个差值的大小,选择较小的那颗星点作为正确匹配星点。
图8 星点运动示意
Fig.8 Star motion diagram

通过综合星点1在方向和方向的距离,即可得到其运动速度1,计算公式为


2.4 概率积累
前帧图像与后帧图像的星点达到一一匹配后,便获得了所有星点的特征描述,包括静态特征和动态特征。进而需要对特征进行差异值的提取,即寻找特征描述与其他星点差异性最大的星点。特征从四个方面进行描述,分别是大小、亮度、运动方向和运动速度。以星点大小为例,需要量化每个星点与其他星点在大小上的差异程度,量化方式如下:
1) 对所有星点的大小进行统计,计算星点大小均值,公式为




据此,可以获得每个星点在亮度、运动方向和运动速度等特征维度的归一化偏差值。
对目标的检测是从4个维度计算的综合结果,因此按照帧间匹配阶段对特征权重的规定进行该星点为目标的概率计算,即

每帧图像均会计算星点为目标的概率值,并且根据图像序列进行累加。空间目标因为其特征的差异性,计算得到的概率值会大于其他星点;通过帧数的累加,某一星点的概率会逐渐增大,与恒星的概率值的差距也会越来越大。图9所示的概率累积结果可以清晰的展示这一规律。

图9 概率累积结果

当某一概率值均达到这两个条件时,即可判断为找到了目标。
3 试验结果
为了验证算法的有效性和实时性,采用大量通过模拟生成的图像数据进行验证测试。每帧图像大小为1 024×1 024像素,位数为8bit,全部图像序列的帧数为100帧。为了验证此算法在不同工况下的适用性,对目标运行在低轨、高轨,以及月亮出现在视场内等三种工况分别运行算法。三种工况下,目标、恒星以及月亮在图像序列中的具体情况如表1所示。
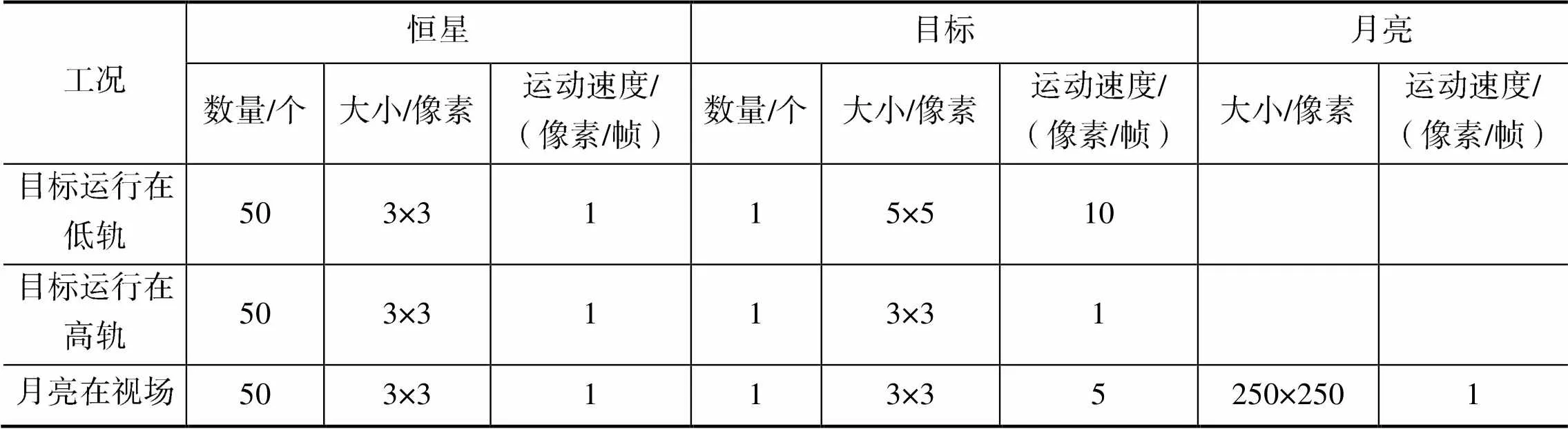
表1 不同工况下的星点呈现情况
对于三种工况的检测概率和虚警概率进行统计,结果如表2所示。

表2 目标检测结果
可以看出,此目标检测算法在三种工况下均具有良好的检测概率和较低的虚警概率。其中,低轨工况下算法的适用性最好。算法可以在避免虚警的前提下,对空间目标准确检测。
实时性是目标检测算法的另一重要指标,若结果产生滞后会影响目标检测系统的正常使用。为了验证此算法的实时性,选择具有FPGA和DSP(主频为150MHz,外接16Mbyte的存储芯片)的图像处理硬件系统。为达到更快的处理速度,考虑到FPGA适用于流式的计算密集型任务,一些涉及形态学处理图像的操作在FPGA中进行,其余操作在DSP中进行。图像大小为1 024×1 024像素时,该图像处理系统的处理速度可达5帧/s。由于算法避开了对图像的大数据量操作,处理更高分辨率的图像也不会增加计算量,因此算法可以满足大视场、高帧频、高分辨率的天文光电探测系统的实时目标检测要求。
4 结束语
本算法适用于实时的天文光电探测系统,用以实时检测空间目标的位置。首先通过形态学的处理,提取出目标以及恒星星点的位置,并提取出所有星点的静态特征,可以对背景噪声和坏点进行有效抑制;依据恒星和目标运动的连续性和稳定性,通过帧间的星点匹配,完成星点动态特征的提取;最后通过目标运动的奇异性,对特征进行综合判断,避免了恒星星点在目标检测阶段的干扰,寻找出特定目标,在保证虚警概率的前提下提高了检测概率。通过FPGA与DSP的图像处理系统进行数据验证,表明算法可以对恒星和目标进行实时检测,并计算得出准确度高的目标检测结果。
[1] 汤泽滢, 黄贤锋, 蔡宗宝. 国外天基空间目标监视系统发展现状与启示[J]. 航天电子对抗, 2015, 31(2): 24-26, 30.
TANG Zeying, HUANG Xianfeng, CAI Zongbao. Development Status and Enlightenment of Foreign Space-based Space Target Surveillance Systems[J]. Aerospace Electronic Warfare, 2015, 31(2): 24-26, 30. (in Chinese)
[2] 乔凯, 智喜洋, 王达伟, 等. 星上智能信息处理技术发展趋势分析与若干思考[J]. 航天返回与遥感, 2021, 42(1): 21-27.
QIAO Kai, ZHI Xiyang, WANG Dawei, et al. Analysis and Some Thoughts on the Development Trend of the On-board Intelligent Information Processing Technology[J]. Spacecraft Recovery & Remote Sensing, 2021, 42(1): 21-27. (in Chinese)
[3] JAIN R, NAGEL H H. On the Analysis of Accumulative Difference Pictures from Image Sequences of Real World Scenes[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 1979, 1(2): 206-214.
[4] 张磊, 史金飞, 罗翔. 运动目标检测的差分图像法分析研究[J]. 工业仪表与自动化装置, 2007(3): 7-11, 48.
ZHANG Lei, SHI Jinfei, LUO Xiang. Analysis and Research of Differential Image Method for Moving Target Detection[J]. Industrial Instrumentation and Automation, 2007(3): 7-11, 48. (in Chinese)
[5] 杨嘉琪, 韩晓红. 基于自适应混合高斯的改进三帧差分算法[J]. 计算机工程与设计, 2021, 42(6): 1699-1705.
YANG Jiaqi, HAN Xiaohong. Improved Three-frame Difference Algorithm Based on Adaptive Gaussian Mixture[J]. Computer Engineering and Design, 2021, 42(6): 1699-1705. (in Chinese)
[6] LIPTON A J, FULIYOSHI H, PATIL R S. Moving Target Classification and Tracking from Real-time Video[C]//Proceedings of the 4th IEEE Workshop on Applications of Computer Vision (WACV'98), Oct. 19-21, 1998, Princeton, New Jersey. [S.l.]: IEEE, 1998: 8-14.
[7] 李刚, 邱尚斌, 林凌, 等. 基于背景差法和帧间差法的运动目标检测方法[J]. 仪器仪表学报, 2006(8): 961-964.
LI Gang, QIU Shangbin, LIN Ling, et al. Moving Target Detection Method Based on Background Difference Method and Frame Difference Method[J]. Chinese Journal of Scientific Instrument, 2006(8): 961-964. (in Chinese)
[8] 程军, 张伟, 丛明煜, 等. 基于星图识别的空间目标检测算法研究[J]. 光学技术, 2010, 36(3): 439-444.
CHENG Jun, ZHANG Wei, CONG Mingyu, et al. Research on Space Target Detection Algorithm Based on Star Pattern Recognition[J]. Optical Technique, 2010, 36(3): 439-444. (in Chinese)
[9] 王敏. 复杂背景下的空间目标自动识别技术[D]. 北京: 中国科学院大学, 2017.
WANG Min. Automatic Recognition Technology of Space Targets under Complex Background[D]. Beijing: University of Chinese Academy of Sciences, 2017. (in Chinese)
[10] 宿德志. 一种快速稳定的星图识别方法及单星模拟器的调校[D]. 长沙: 国防科学技术大学, 2010.
SU Dezhi. A Fast and Stable Star Pattern Recognition Method and Adjustment of the Single-star Simulator[D]. Changsha: National University of Defense Technology, 2010. (in Chinese)
[11] 王波. CMOS星敏感器星图识别方法研究[D]. 武汉: 华中科技大学, 2004.
WANG Bo. Research on CMOS Star Sensor Star Map Recognition Method[D].Wuhan: Huazhong University of Science and Technology, 2004. (in Chinese)
[12] PADGETT C, KREUTZ-DELGADO K, UDOMKESMALEE S. Evaluation of Star Identification Techniques[J]. Journal of Guidance Control & Dynamics, 2012, 20(2): 259-267.
[13] FUJITA K, HANADA T, KITAZAWA Y, et al. A Debris Image Tracking Using Optical Flow Algorithm[J]. Advances in Space Research, 2012, 49(5): 1007-1018.
[14] 裴巧娜. 基于光流法的运动目标检测与跟踪技术[D]. 北京: 北方工业大学, 2009.
PEI Qiaona. Moving Target Detection and Tracking Technology Based on Optical Flow Method[D]. Beijing: North China University of Technology, 2009. (in Chinese)
[15] 袁国武, 陈志强, 龚健, 等. 一种结合光流法与三帧差分法的运动目标检测算法[J]. 小型微型计算机系统, 2013, 34(3): 668-671.
YUAN Guowu, CHEN Zhiqiang, GONG Jian, et al. A Moving Target Detection Algorithm Combining Optical Flow Method and Three-frame Difference Method[J]. Small Microcomputer System, 2013, 34(3): 668-671. (in Chinese)
[16] 杨叶梅. 基于改进光流法的运动目标检测[J]. 计算机与数字工程, 2011, 39(9): 108-110, 160.
YANG Yemei. Moving Target Detection Based on Improved Optical Flow Method[J]. Computer and Digital Engineering, 2011, 39(9): 108-110, 160. (in Chinese)
[17] 李成美, 白宏阳, 郭宏伟, 等. 一种改进光流法的运动目标检测及跟踪算法[J]. 仪器仪表学报, 2018, 39(5): 249-256.
LI Chengmei, BAI Hongyang, GUO Hongwei, et al. A Moving Target Detection and Tracking Algorithm Based on Improved Optical Flow Method[J].Chinese Journal of Scientific Instrument, 2018, 39(5): 249-256. (in Chinese)
[18] 胡谋法. 复杂背景下大视场弱小目标检测技术研究[D]. 长沙: 国防科学技术大学, 2008.
HU Moufa. Research on Detection Technology of Small and Large Field of View under Complex Background[D]. Changsha: National University of Defense Technology, 2008. (in Chinese)
[19] 胡建明, 乔凯, 智喜洋, 等. 天基观测条件下复杂环境对空中弱小目标可探测性的影响[J]. 红外与毫米波学报, 2019, 38(3): 351-357.
HU Jianming, QIAO Kai, ZHI Xiyang, et al. Influence of Complex Environment on the Detectability of Weak and Small Aerial Target under Space-based Observation Mode[J]. Journal of Infrared and Millimeter Waves, 2019, 38(3): 351-357. (in Chinese)
[20] 王树文, 闫成新, 张天序, 等. 数学形态学在图像处理中的应用[J]. 计算机工程与应用, 2004(32): 89-92.
WANG Shuwen, YAN Chengxin, ZHANG Tianxu, et al. Application of Mathematical Morphology in Image Processing[J]. Computer Engineering and Applications, 2004(32): 89-92. (in Chinese)
Research on the On-orbit Real-time Space Target Detection Algorithm
HAN Luyao1TAN Chan2LIU Yunmeng2SONG Rui*1
(1 State Key Laboratory of Integrated Service Networks, Xidian University, Xi′an 710071, China)(2 Shanghai Institute of Technical Physics of the Chinese Academy of Sciences, Shanghai 200083, China)
Space target surveillance is an important prerequisite for ensuring the normal operation of space activities. The use of optical equipment for photoelectric detection is one of the important means of space target surveillance. In the astronomical photoelectric deep-space image sequence, the imaging characteristics of stellar targets and space targets are similar, which will interfere with target detection. Real-time and robust target detection is also very difficult. The article analyzed and studied the astronomical photoelectric image target imaging law, and proposed a target detection algorithm based on frame matching. By performing image preprocessing through morphological operations, and extracting features through inter-frame matching, and then detect spatial objects were detected. This algorithm is suitable for the real-time detection requirements of the astronomical photoelectric detection system for space targets under the background of deep space. Under the experiment of FPGA and DSP hardware platform, the validity and real-time performance of the algorithm were verified.
target detection; morphology; real-time image processing; visible light image; space remote sensing
TN957.51
A
1009-8518(2021)06-0122-10
10.3969/j.issn.1009-8518.2021.06.012
2021-09-03
韩璐瑶, 谭婵, 刘云猛, 等. 在轨实时空间目标检测算法研究[J]. 航天返回与遥感, 2021, 42(6): 122-131.
HAN Luyao, TAN Chan, LIU Yunmeng, et al. Research on the On-orbit Real-time Space Target Detection Algorithm[J]. Spacecraft Recovery & Remote Sensing, 2021, 42(6): 122-131. (in Chinese)
韩璐瑶,女,1996年生,2019年获中国石油大学(华东)通信工程专业学士学位。研究方向为图像传输与处理。E-mail:han_xidian@sina.com。
宋锐,男,2009年获西安电子科技大学博士学位,西安电子科技大学通信与信息系统教授,博士生导师。研究方向为视频编解码算法及硬件架构、计算机视觉(三维)算法研究。
(编辑:夏淑密)
猜你喜欢
中国药学药品知识仓库(2022年10期)2022-05-29
小哥白尼(军事科学)(2022年2期)2022-05-25
光子学报(2022年3期)2022-04-01
小资CHIC!ELEGANCE(2021年27期)2021-07-30
红领巾·萌芽(2019年8期)2019-08-27
红领巾·探索(2018年7期)2018-10-16
小学科学(2017年1期)2017-02-16
百科知识(2016年18期)2016-10-28
CHIP新电脑(2016年3期)2016-03-10
小哥白尼·趣味科学画报(2009年8期)2009-08-07