混凝土复杂表面裂缝特征自动提取算法研究
2022-01-15 06:15徐春雷徐文强
三峡大学学报(自然科学版) 2021年6期
王 康 强 晟 徐春雷 李 禹 徐文强
(1.河海大学 水利水电学院, 南京 210098;2.无锡市重点水利工程建设管理处, 江苏 无锡 214000)
大坝、泵站、水闸等水利工程中的大体积混凝土,因为水泥水化产生大量的热、混凝土收缩变形、结构约束、外界温度变化等,加之在实际工程中大体积混凝土温度控制措施不严密,会产生表面裂缝[1-3].作为工程结构缺陷标志之一的表面裂缝,在工程前期仅影响外观质量,若不及时检测和补救,可能会发展成不可挽回的深层裂缝和贯穿裂缝,极大地影响工程质量和安全.相比于传统的人工检测的低效性和主观性[4],近年来随着人工智能的发展、无人机和无人车在工程应用上的推广以及基于机器视觉混凝土裂缝检测方法的不断完善,无人检测技术更适用于工程应用,且其有更大的提升空间.
针对基于机器视觉的混凝土裂缝检测技术和设备,国内外学者已经有了一定的研究.周颖等[5]采用消费级照相机成功提取混凝土裂缝特征,在实验室条件下将裂缝宽度误差控制在1 mm 左右;蒲炳荣等[6]提取了分岔裂缝的分岔点生长编码特征,量化其初始生长方向;方志[7]在混凝土表面粘贴纯色标定块来标定、修正原始图像从而提取出裂缝宽度,并以正拍和斜拍图像两种方式对提取方法进行了验证;郝更新等[8]针对现有大坝巡检方式的缺点,自研了一套大坝裂缝巡检骨架提取系统.但目前大部分研究是针对单一裂缝,对于如图1所示多条裂缝、分岔裂缝、弯曲裂缝等复杂裂缝特征提取研究还处于起步阶段.本文首先对混凝土裂缝图像进行前处理,得到裂缝骨架,适当分割分岔裂缝和弯曲裂缝,用线性函数拟合裂缝骨架线,获取裂缝走向和倾斜角度,引入裂隙玫瑰图对提取到的裂缝特征进行统计.分别对虚拟裂缝和实际裂缝进行特征提取,并绘制“裂缝玫瑰图”.此方法为混凝土裂缝自动检测提供可靠依据,进而分析大体积混凝土裂缝产生的原因奠定了基础.
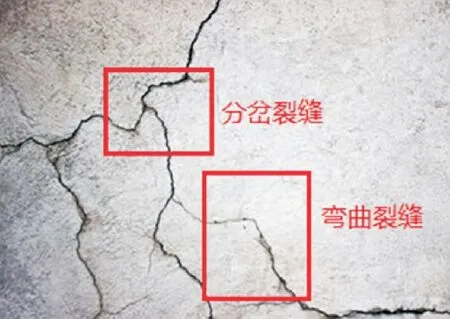
图1 复杂裂缝
1 裂缝图像前处理
裂缝图像前处理的目的是在保证目标特征不丢失的前提下,尽量去除因为混凝土表面光照不均匀、坑槽、斑点和污染痕迹而产生的图像噪声,增强有关信息的可检测性,最大限度地简化数据,降低裂缝骨架提取和裂缝特征提取的难度.
1.1 图像灰度化
通过相机采集到的混凝土裂缝图片为三通道的RGB图片,将其转换为灰度图片以备裂缝特征的提取.本文采用加权平均法将图片进行灰度化,公式[9]为:

式中:Ggray为像素点灰度值;R、G、B分别为像素点的红、绿、蓝分量.
1.2 图像平滑
图像平滑处理的目的是消除图像因拍摄、传输过程中产生的噪声,尽可能地保留其目标特征.常见的图像平滑处理有均值滤波、高斯滤波、中值滤波和双边滤波等[10].均值滤波随着卷积核的增大,图像失真越严重,对裂缝特征影响越大,需要平衡失真和去噪效果;高斯滤波考虑中心点附近点的权重大小,相对改善了模糊问题,但仍要平衡图像失真和去噪效果;中值滤波不存在图像模糊的问题,可以在不影响原有图像的情况下去除全部噪声,但由于排序等操作,运算量太大.
本文采用双边滤波,对图像进行平滑处理.双边滤波综合考虑空间和色彩信息,在滤波过程中能够有效的保护混凝土裂缝的边缘信息.各个滤波处理效果如图2所示,注意黑白边界模糊情况.经过双边滤波处理后的裂缝图像能适当的去除图像噪声,方便进一步提取裂缝特征.
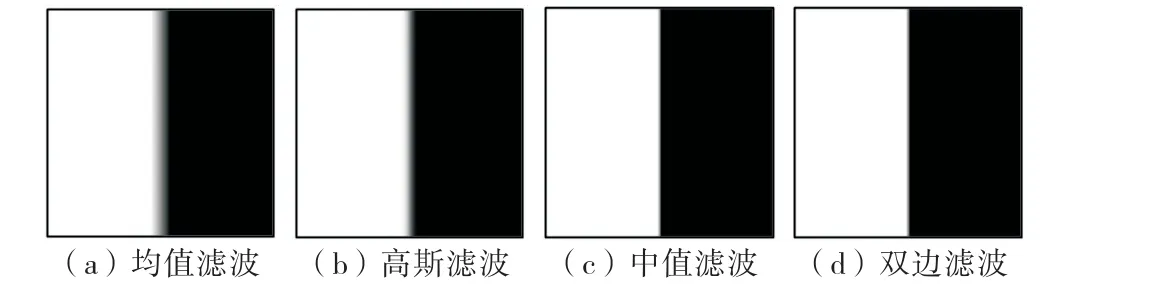
图2 4种滤波效果图
1.3 阈值分割
常用的分割算法为基于阈值的分割算法,其主要原理是利用图像中待提取的裂缝与背景的灰度差异,设置合适的阈值,把图像中的混凝土裂缝从背景中区分出来.其公式为:

式中:f(x,y)为原始图像;T为阈值;g(x,y)为获得的二值图像.
本文采用自适应分割算法[11],根据不同区域的亮度分布,将裂缝图像分割成小区域,分别计算其局部阈值.本方法可以极大地降低光照不均匀对裂缝图片的影响,很好地获取完整的裂缝区域.混凝土表面裂缝原始图像如图3(a)所示,经过图像灰度化、图像平滑、阈值分割处理后如图3(b)所示.
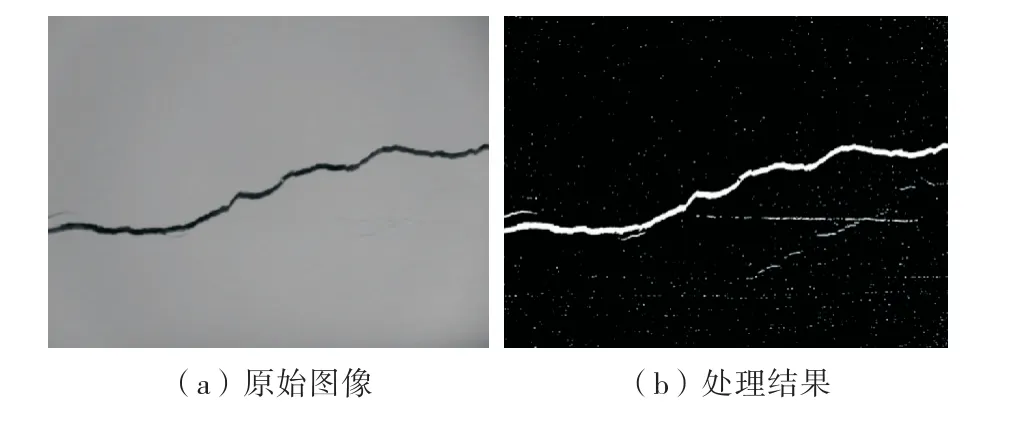
图3 混凝土表面裂缝
1.4 形态学处理
形态学运算主要包括开运算和闭运算,开运算可以适当地去除混凝土裂缝的毛刺,去除部分噪声;闭运算可以填充混凝土裂缝内部的毛孔,拼接识别不完整的混凝土裂缝碎片,但二者都需要设置合适大小的结构元.在裂缝处理中二者需要灵活地运用.分别对图像进行开运算和闭运算处理,结果如图4所示.
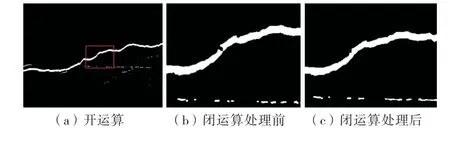
图4 形态学运算
1.5 非裂缝区域的删除
删除非裂缝区域包括连通域标记和孤立点消除.八连通区域是指对应像素点的上、下、左、右、左上、右上、左下、右下,共8 个方向的像素点,其示意如图5(a)所示.遍历图像所有像素点,根据八连通域原理对二值图像所有连通区域进行标记,利用噪点和裂缝区域面积大小不同,设置合适的阈值,去除噪点区域,获得混凝土裂缝二值图像.其成果如图5(b)所示.
1.6 裂缝骨架的提取
裂缝骨架是指能够有效反映混凝土裂缝特征的单像素点组成的骨架线,除端点和分岔点外,骨架像素点八连通域内有且仅有两个像素点.本文首先采用Zhang并行细化算法[12],从裂缝边缘不断迭代计算,逐层剥离裂缝的边界像素点直至删除所有满足条件的像素点,得到初步的裂缝骨架.然后采用安世全等[13]提出的结合模板思想对Zhang并行细化算法的裂缝骨架成果进行完善,消除非单一像素宽度的像素点,并适当去除毛刺,裂缝骨架提取结果如图6所示.裂缝图像前处理工作已完成,其基本流程如图7所示.
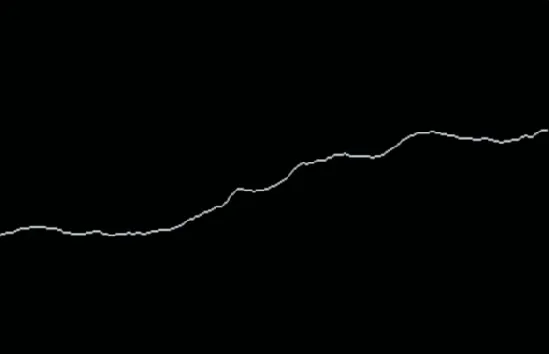
图6 裂缝骨架
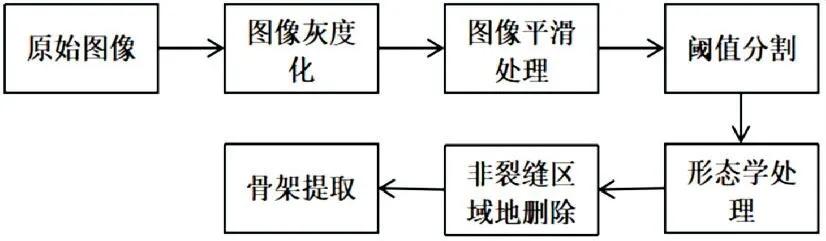
图7 裂缝前处理流程图
2 裂缝特征提取
裂缝走向与倾斜角度是混凝土裂缝的重要特征,可以帮助分析裂缝的成因并判断混凝土主应力方向.本文采用线性函数拟合裂缝骨架线,获取裂缝特征.根据裂缝走向和倾斜角度将裂缝分成4 类:垂直裂缝、水平裂缝、左斜裂缝(从左上到右下)、右斜裂缝(从右上到左下).
2.1 单个一般裂缝
对单个混凝土裂缝骨架进行如下的操作,获取裂缝走向和倾斜角度.
1)以裂缝图像左下角为坐标原点,建立坐标系,对裂缝骨架线进行线性拟合得到函数y=kx+b.
2)根据k值,得到裂缝的倾斜角度θ,裂缝的倾斜角度定义为拟合直线和X坐标轴正方向的夹角.

3)当θ<22.5°或157.5°≤θ<180°时裂缝为水平裂缝;当22.5°≤θ<67.5°时裂缝为右斜裂缝;当67.5°≤θ<112.5°时裂缝为垂直裂缝;当112.5°≤θ<157.5°时裂缝为左斜裂缝.对图6的裂缝骨架进行线性拟合,成功地获取了裂缝特征,拟合结果如图8所示(图中坐标单位为像素点).拟合函数为y=0.193 8x+92.73,裂缝为水平裂缝,裂缝倾角为11.04°,拟合优度R2为0.922 9,函数拟合效果良好.
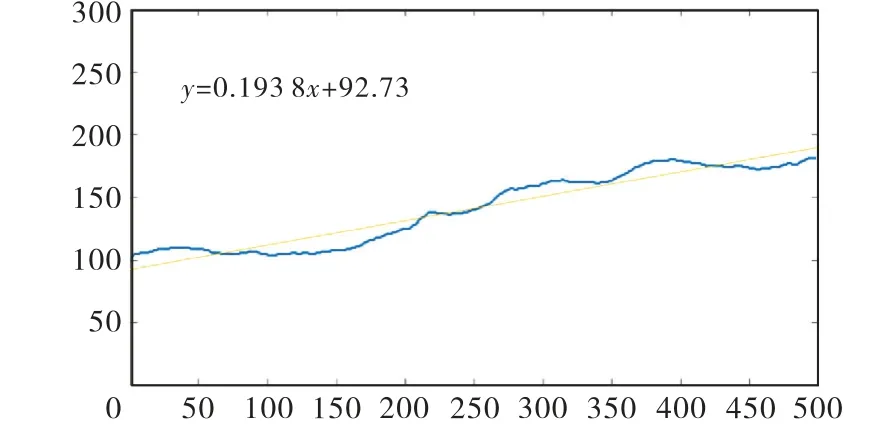
图8 拟合函数和骨架图像
2.2 弯曲裂缝
对于弯曲裂缝,直接进行线性拟合并不能反映其特征,因此必须寻找其拐点,在拐点处分割裂缝,进而分段处理.拐点的识别是分割裂缝的前提,算法流程如图9所示,具体步骤如下:
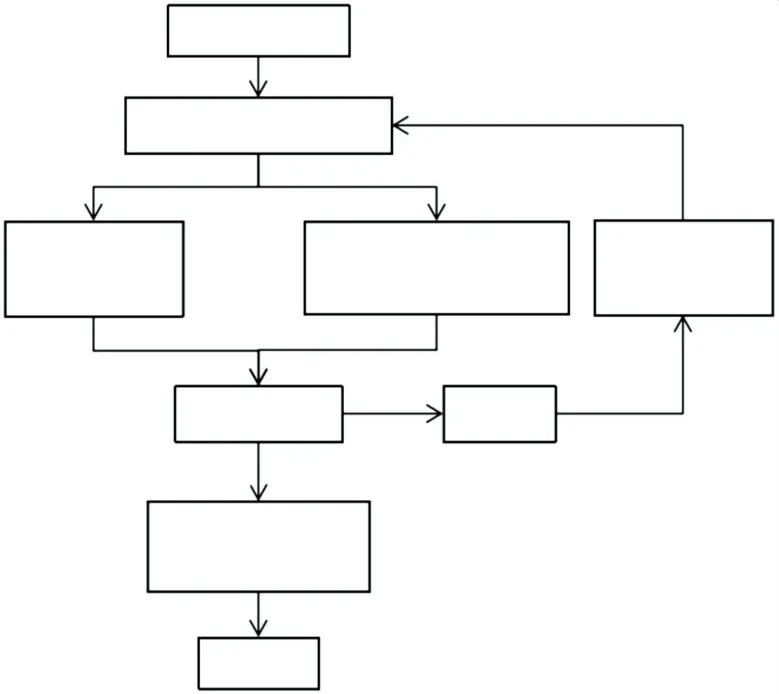
图9 弯曲裂缝特征提取算法流程图
1)遍历图像所有像素点,根据八连通域内像素点个数,找到裂缝的端点A与B,并计算其距离D.
2)再次遍历图像所有像素点,找到骨架像素点上距离直线AB最大的像素点,记录其坐标及其最大距离dmax.
3)设置阈值T阈=k D(k为系数),当dmax<T阈时,裂缝为非弯曲裂缝,直接输出裂缝骨架;否则记录为拐点,分割并存储裂缝,将其作为裂缝骨架不断迭代计算.
4)分别对得到的所有裂缝进行线性拟合,提取裂缝特征.
对图10所示的弯曲裂缝骨架进行处理,弯曲裂缝分割效果如图11所示,特征提取结果见表1.此算法可以有效地分割弯曲裂缝,为进一步提取裂缝特征奠定基础.
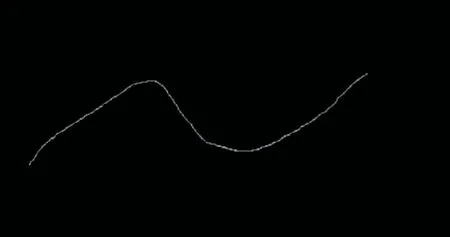
图10 弯曲裂缝骨架
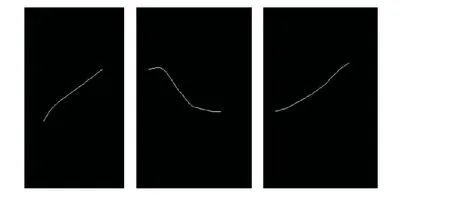
图11 弯曲裂缝分割结果图
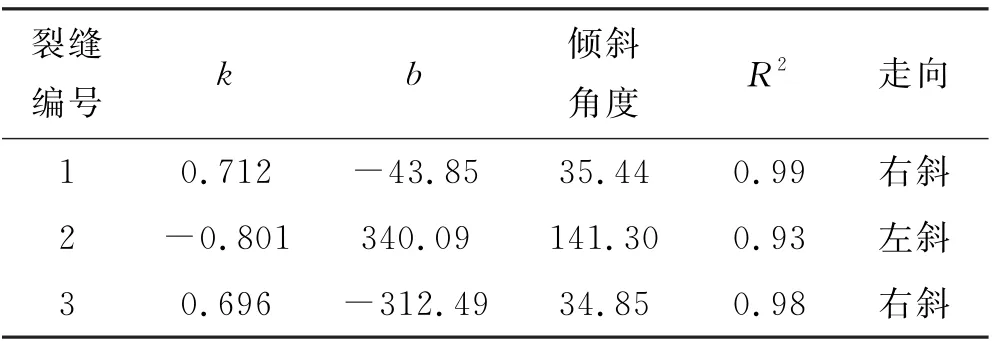
表1 弯曲裂缝特征提取结果表
2.3 分岔裂缝
为了简化后续裂缝特征提取,将分岔裂缝骨架线根据分岔点分成多条分支,分割裂缝骨架线,并根据连通域原理进行标记和存储.具体步骤如下:
1)遍历图像所有像素点,记录每个像素点八连通域内骨架像素点的个数,像素点个数为3或大于3的记录为分岔点,并存储分岔点.
2)在原骨架图像中适当消除分岔点,将分岔点八连通域像素点均改为背景像素点,分割裂缝骨架并存储.
3)根据连通域原理标注并存储单个裂缝,分别对单个裂缝提取裂缝特征,最后汇总.
为了验证算法的可靠性,对如图12(a)所示的分岔裂缝骨架,提取裂缝特征.分割效果如图12(b),特征提取结果见表2.本算法成功地分割了裂缝并提取裂缝特征.
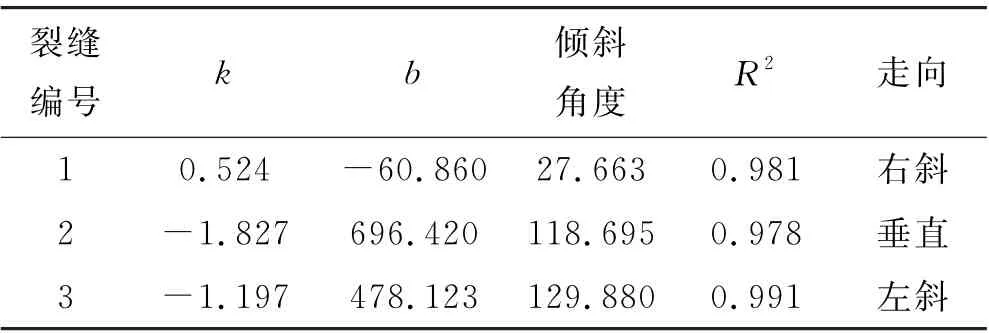
表2 分岔裂缝特征提取结果表
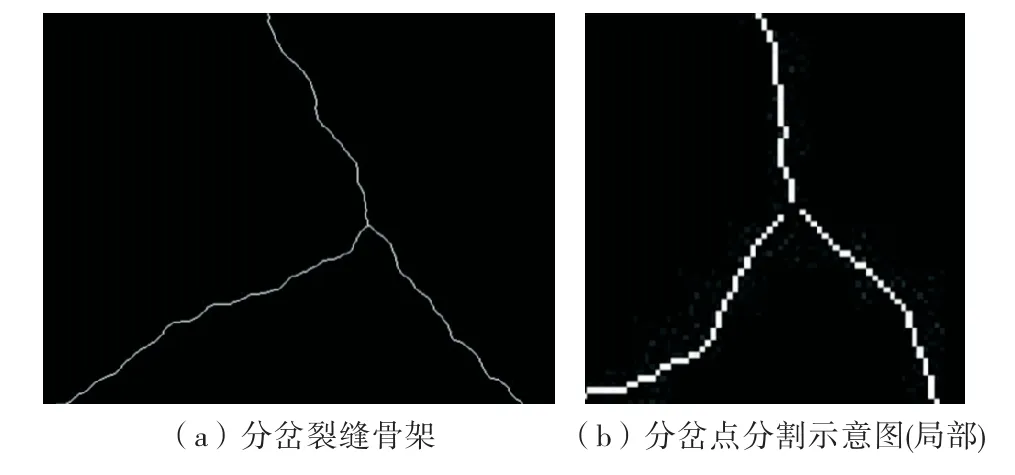
图12 分岔裂缝
3 基于计算机视觉的复杂裂缝特征提取算法
3.1 裂缝特征提取总体流程
本文所提出的复杂裂缝特征提取算法,适用于多条裂缝、弯曲裂缝、分岔裂缝等复杂裂缝,具体步骤如下:1)原始图像前处理,得到复杂裂缝骨架线;2)遍历图像所有像素点,寻找分岔点并分割裂缝;3)依次对所有单条裂缝,寻找拐点并分割裂缝,存储分割结果;4)依次对所有裂缝进行线性拟合,提取裂缝特征.
3.2 可靠性验证
为了验证算法的有效性和可靠性,虚拟了一套裂缝,如图13(a)所示;并对图1所示的复杂裂缝进行前处理,得到如图13(b)所示的实际裂缝骨架.这两套裂缝并无关联,是验证算法的两个不同算例.分别对图13中的虚拟裂缝骨架和实际裂缝骨架进行特征提取,特征提取结果见表3~4.
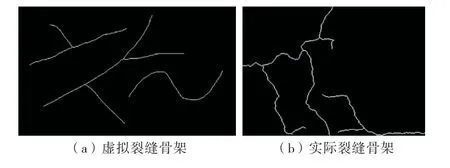
图13 裂缝骨架
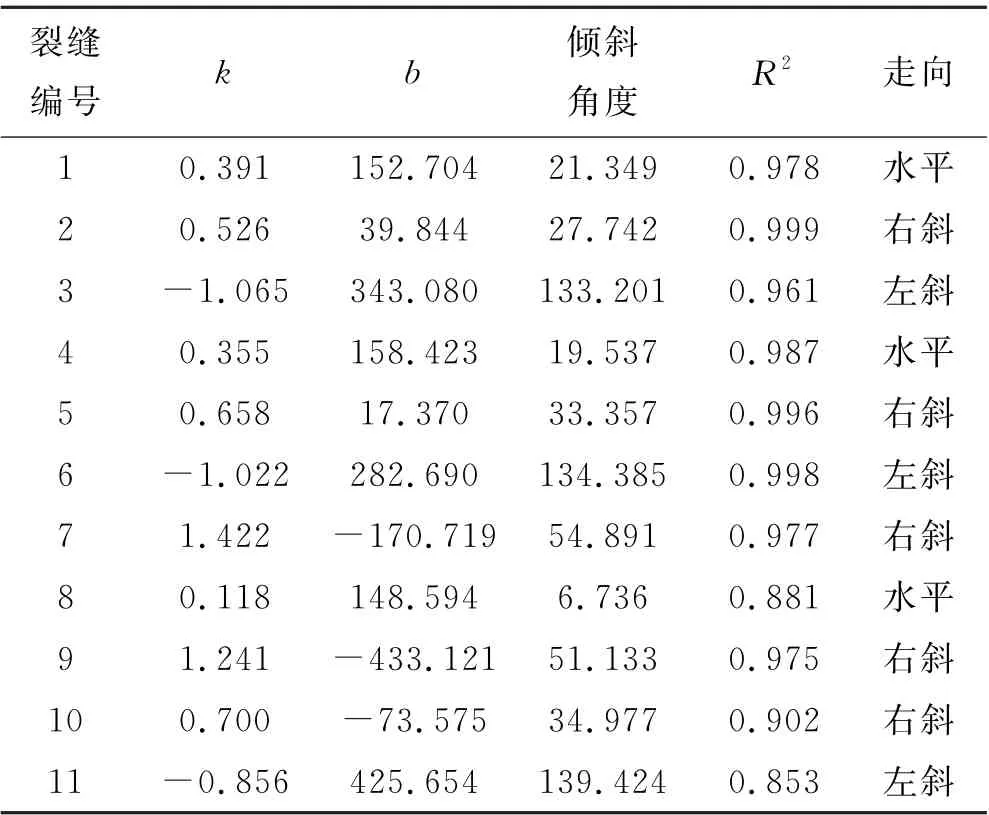
表3 虚拟裂缝特征提取结果表
虚拟裂缝和实际裂缝均被分割成11条裂缝骨架线,并成功地提取了裂缝特征,因图幅限制,不再一一展示其分割图像.二者特征提取结果良好,进一步验证了算法的可靠性,为复杂裂缝特征的可视化打下基础.
分析得知:当裂缝接近水平或者垂直时(见表4,11号裂缝),对应的拟合优度R2较低,但根据图14(图中坐标单位为像素点)所示的拟合图像,拟合效果良好,其拟合直线可以表征裂缝特征,并不影响裂缝特征提取结果.进行线性拟合时,当数据点集合接近水平和垂直时,拟合优度R2不能作为判断线性拟合优良的依据,这是由于其本身的性质决定的.因此拟合优度不能作为评价水平裂缝和垂直裂缝的拟合效果依据.
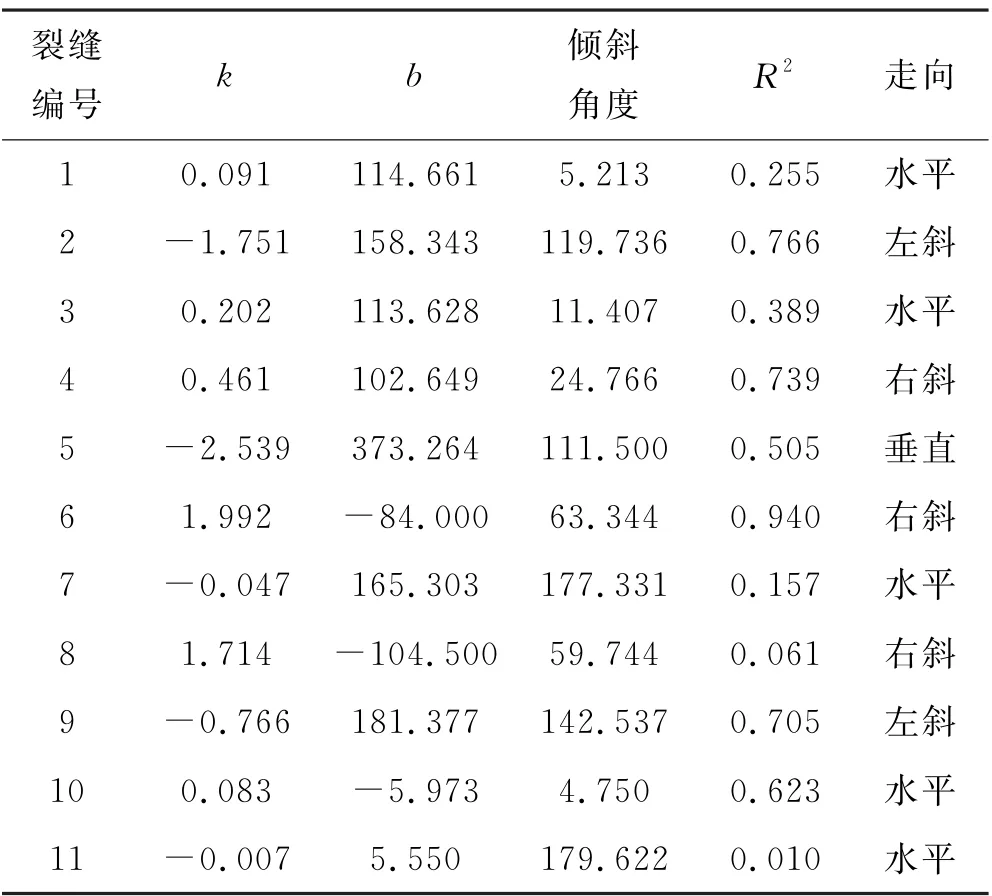
表4 实际裂缝特征提取结果表
图14 拟合结果
4 裂缝玫瑰图
为了统计提取到的裂缝特征,将工程地质中裂隙玫瑰图的概念引入裂缝统计.将裂缝根据倾斜角度分类,统计不同角度范围内裂缝条数,以半径表示条数,制作半圆“裂缝玫瑰图”,图中不同颜色代表不同倾角范围的裂缝.从图中可以直接看出裂缝大致走向和裂缝倾斜角度,有利于获取大体积混凝土产生裂缝的主应力方向统计信息,进而有利于分析裂缝产生的原因.虚拟裂缝玫瑰图和实际裂缝玫瑰图如图15所示.
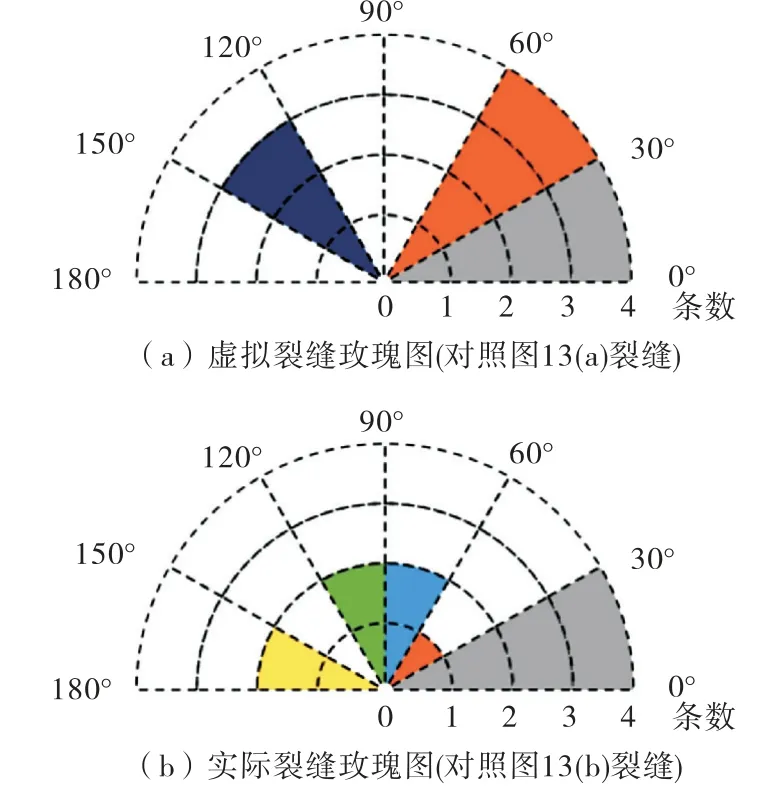
图15 裂缝玫瑰图
5 结 论
1)在单个混凝土裂缝特征提取的基础上,将线性拟合引入裂缝特征提取,并分别对单个一般裂缝、分岔裂缝和弯曲裂缝适当处理,获得裂缝走向和倾斜角度特征.
2)本文提出的复杂裂缝特征提取算法,经过虚拟裂缝和实际裂缝验证,具有一定的适用性,此算法可以作为自动化检测系统的基础,为大体积混凝土裂缝检测与防治奠定基础.
3)将工程地质中裂隙玫瑰图的概念引入裂缝统计中,成功将复杂裂缝特征统计可视化,为分析大体积混凝土裂缝产生的原因并对裂缝修补提供定量依据.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
电子乐园·上旬刊(2022年5期)2022-04-09
现代电子技术(2021年1期)2021-01-17
发明与创新·大科技(2020年6期)2020-06-22
中国新技术新产品(2020年5期)2020-05-06
北京航空航天大学学报(2019年9期)2019-10-26
现代电子技术(2018年18期)2018-09-12
电机与控制学报(2018年9期)2018-05-14
电脑知识与技术(2018年35期)2018-02-27
科学家(2017年12期)2017-08-10