基于SLAM移动测量技术的逆向建筑模型获取
2022-01-21 06:15谢孔振
北京测绘 2021年12期
谢孔振
(1.北京市测绘设计研究院, 北京 100038; 2.城市空间信息工程北京市重点实验室, 北京 100038)
0 引言
近年来,随着北京市老城保护、历史文化保护区房屋修缮、背街小巷整治、城市环境景观提升的推进,尤其是不久前《首都功能核心区控制性详细规划(街区层面)(2018—2035年)》的发布,在首都对于保护老城整体格局、加大文物与历史建筑保护力度,且鼓励开放与适度利用相结合的规划理念指导下,需要对一些历史建筑进行保护性修缮、加固、外立面美化改造。但由于建成年代久远等历史原因,这些建筑原设计图纸往往早已灭失,设计单位亟须对建筑的现状进行精准测绘,恢复建筑平面图、立面图、剖面图、结构图纸,这种测绘实现方式称为逆向工程(Reverse Engineering,RE)测绘。测绘目的是在所恢复的建筑平立剖面图基础上进行结构加固、内部装修、外立面改造等设计,甚至可以为设计、施工过程提供全景影像视图、三维点云数据、建筑信息建模(Building Information Modeling,BIM)模型等。传统的古建筑测绘大都采用人工作业的方法,一般通过全站仪和普通钢尺来测绘建筑物的平面、立面和剖面图[1],这种方法获取数据单一,对实体的反映形式简单单调,且传统方法投入人员多、工作量大、作业效率低,在遇到复杂建筑物时难以满足测绘要求[2]。因此,这种对建筑物室内外的精细化、可视化的测绘需求给传统测绘方式带来了不小的挑战。
1 三维数据采集与SLAM技术的结合
1.1 批量化三维数据采集手段
测绘地理信息行业作为当前新兴的战略产业,可以为大量上下游行业的发展提供强大的空间大数据支撑。随着光学、电子、传感器、计算机等技术的发展,基于激光扫描的三维技术成为当前空间数据获取的重要手段。三维激光扫描是数字化、信息化测绘阶段的代表技术,不同于常规的测绘数据获取方法,常规测量获取到的往往是单一的、二维的信息,很难大规模获取三维空间信息。而三维激光扫描技术以其特有的技术优势可以快速、直观、有效地将所在环境的三维信息实现数字化、可视化、仿真化。它克服了传统测量手段效率低、劳动强度大、采集速度慢的局限性,具有采样率高、精度高、受外界影响小、非接触测量等特点[3],能够对任意物体进行扫描,且不受天气影响,可以不分昼夜地完成各类测量任务[4],其信息量丰富、可视化强、便于使用。随着现代社会对信息化程度及大数据需求的提高,特别是很多城市提出了数字城市、智慧城市等概念后,市场对空间三维信息的需求更加迫切。
20世纪90年代中期,以三维激光扫描为代表的激光雷达测量系统应运而生,它是当前三维空间数据采集应用最为广泛、技术最为成熟的测量系统,三维激光扫描技术是一项通过非接触式高速激光扫描测量,以阵列式点云的形式获取物体表面三维空间数据的新技术[5]。随着三维激光扫描测量系统在测量速度、测绘精度、抗干扰能力等各方面性能的提升,它逐渐成了测绘地理信息行业研究的热点,应用领域不断扩展,逐步成为快速获取空间实体三维数据的重要方式之一。
1.2 SLAM在激光扫描技术中的应用
SLAM技术无须全球导航卫星系统(Global Navigation Satellite System,GNSS)信号,在封闭空间能够实现快速准确定位,在地下空间与建模中应用广泛[6]。在运动过程中,机器人通过激光雷达(Light Detection And Ranging, LiDAR)传感器或相机测定自身的姿态、位置以及运动轨迹,并且可以在运动过程中进行增量式的地图构建,从而达到实时定位和地图构建的目的。因此,SLAM技术解决了机器人“我在哪里”(在陌生的空间环境中如何准确判定自身位置)与“我周围的环境是什么”(Mapping即地图构建)的问题。它可以利用机器人自身搭载的传感器观测到的空间数据来增量式地构建建筑物的 3D 模型,同时利用构建出来的环境模型来计算出机器人的位置与姿态。
近年来,地面三维激光扫描仪已较多地应用于测绘领域。2007—2010年,法国Julien Travelletti 等[7]利用远距离地面式激光扫描仪连续3年对Super-Sauze滑坡体进行了数据采集,并从点云时间序列中提取相关有用信息;Rongjun Qin等[8]研究了三维激光扫描技术应用于街面变化监测;2011年,俄罗斯测绘工作者开始对莫斯科城市标志性建筑 Shukhov 无线电塔进行了三维激光扫描及3D建模。所用到的这些设备均为地面型固定式三维激光扫描系统,但基于SLAM移动测量技术的扫描系统应用尚少。推车式SLAM移动测量技术则是将SLAM技术与三维激光扫描技术相结合,使用推车式移动测量设备上搭载的LiDAR传感器,实现三维空间数据的高效与全方位采集。它能够应用于室内及地下没有被GPS信号覆盖的环境中,进行点云扫描,从而实现三维建模。在推车式SLAM移动测量技术克服了地形环境的限制后,被广泛地应用于室内空间数字化、房产测绘、室内地图、工厂改造、场馆改造、街区改造、地理信息系统融合建筑信息建模(Geographic Information System+Building Information Modeling,GIS+BIM)、会展等领域。这种基于SLAM的空间三维数据获取技术,同时拥有激光扫描和移动测量两种技术的优点[9],作为目前测绘界最先进的三维空间数据采集手段之一,它的成熟应用将会极大地减少测绘工作者的外业工作量,也代表着今后测绘地理信息行业在数据采集方面的一个应用发展方向。
本文通过案例,对推车式SLAM移动测量技术在建筑逆向测绘中进行应用尝试,对其数据采集精度进行分析,并提出提高数据采集及后处理精度的方法。
2 应用案例
什刹海环湖地区景观提升项目测绘项目为西城区重点项目,旨在对环什刹海历史文化保护区进行保护性修缮。除测绘环湖周边地形图外,重点对荷花市场、什刹海会馆以及小王府(图1)等所有古建及仿古建筑进行平面、立面、剖面测绘,为设计提供详细的建筑图纸,并提供全景影像视图、三维点云数据,供设计使用以便于今后对建筑进行保护改造。

图1 项目范围
2.1 使用设备介绍
本项目数据采集所使用的设备是德国NavVis公司生产的S365推车式SLAM移动测量系统(图2),它拥有6台1 600万像素的相机、3台LiDAR扫描头,最大测距30 m,标称扫描精度0~30 mm。具体指标如表1所示。

图2 S365测量系统
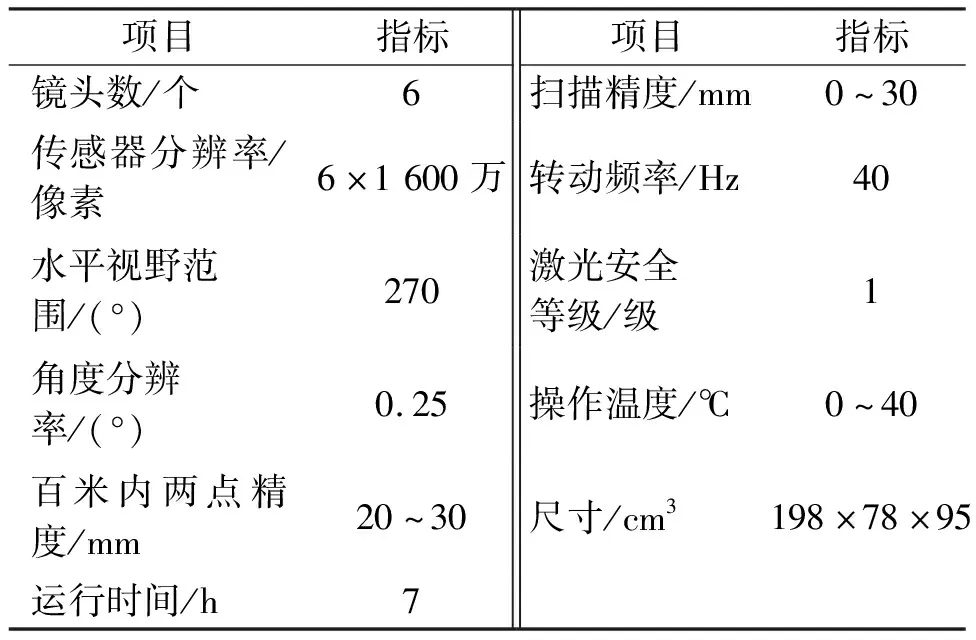
表1 S365精度指标
2.2 作业流程
作业流程如图3所示。首先按照设计要求进行技术方案设计,并于第一时间组织了现场踏勘,通过了解现场标的详细情况,以便确定推扫方案及锚点位置选设。
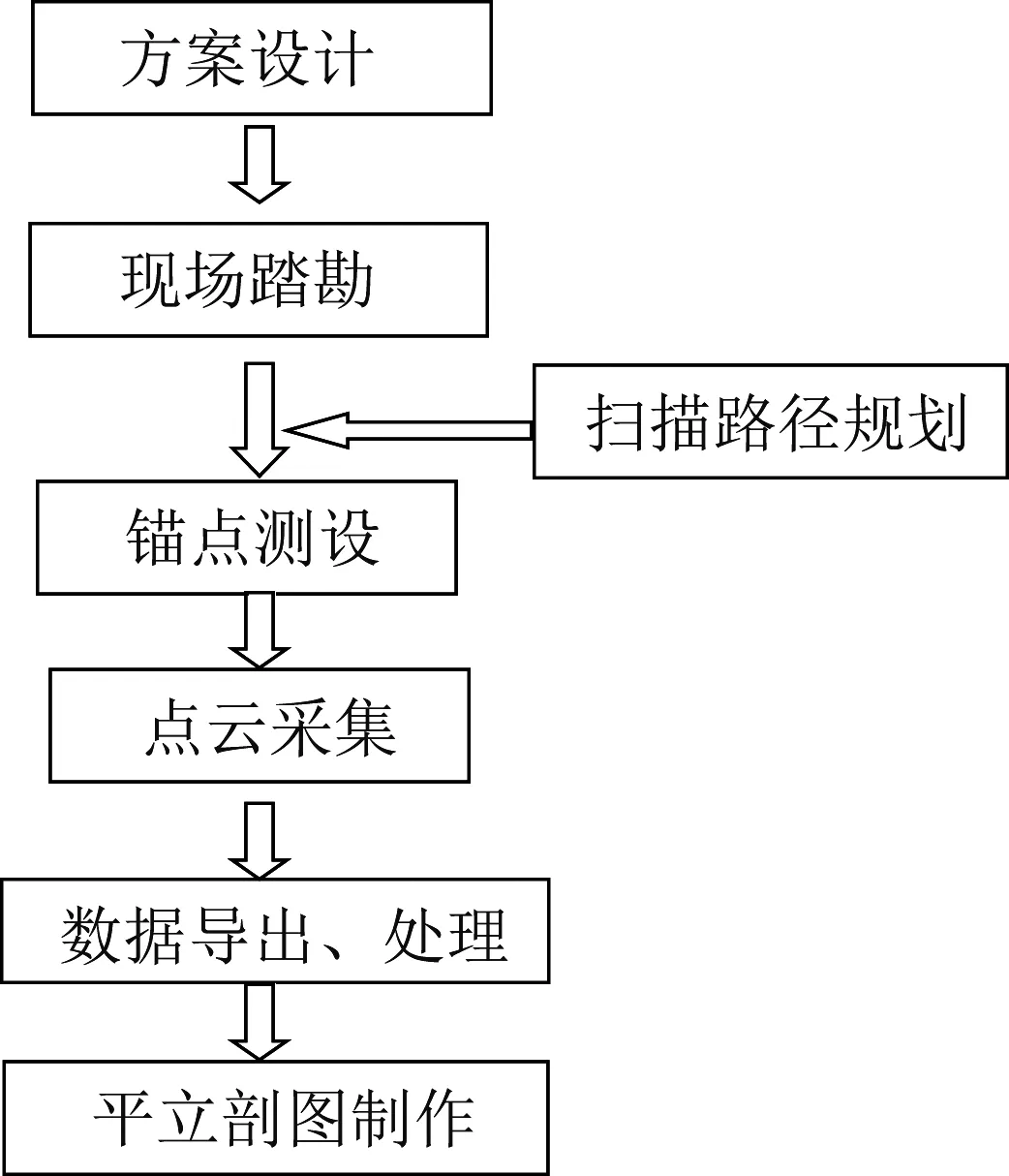
图3 作业流程图
2.3 路径规划
根据踏勘情况,分别对荷花市场、小王府、什刹海会馆的外部及室内进行推扫路径规划,具备条件的区域尽量设置成闭环路径,不能形成闭环路径的,注意在局部区域设置重叠或交叉路径。
2.4 锚点测设
现场沿规划路径每隔30 m左右布设锚点,室外用钢钉及红色油漆标记,室内采用锚点贴纸。利用北京市连续运行参考站系统,采用RTK 方式配合全站仪进行测设。
当然,并非所有锚点必需测定绝对坐标,部分测定坐标的锚点在后处理阶段参与数据重建,可以将点云数据定位至绝对位置;没有测定坐标的锚点作用也很重要,当SLAM移动测量系统重复经过该锚点时,2次或多次采集到的数据将用于重算整合并用以提高点云精度。至于按照多大的密度测设锚点坐标,这需要在目标测绘精度与布设并测量锚点所花费的时间成本之间进行权衡。
2.4.1实时差分定位(GPS-RTK)测量
锚点宜选择在扫描路线上观测条件良好的地方,观测时应满足下列要求:位置精度因子(Position Dilution of Precision,PDOP)小于6;卫星高度截止角大于15°;有效的观测卫星数不少于5颗;实时差分定位(Global Positioning System-Real Time Kinematic,GPS-RTK)测量,应进行不少于2个测回独立观测;记录的观测数据应是GPS-RTK观测值的固定解,固定解应是稳定收敛至毫米级精度后开始定位观测、记录并存储;测回间的平面坐标分量较差不应超过2 cm,应取各测回结果的平均值作为最终观测成果。
2.4.2导线测量
根据现场的情况,对于不利于开展GPS-RTK测量的地方,在场区内采用三级导线测量方法测定锚点坐标,观测时,宜采用2″级的仪器一测回测定水平角。三级导线测量的主要技术要求如表2所示。
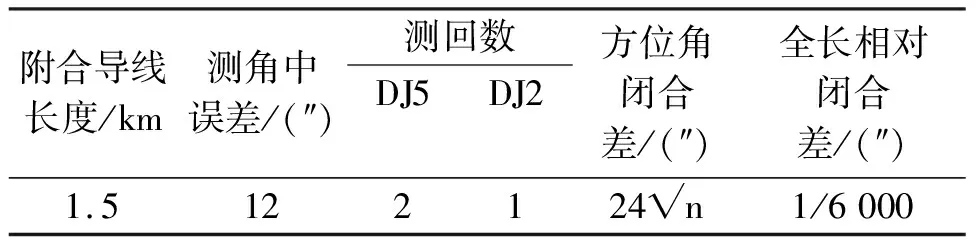
表2 三级导线或导线网的技术要求
导线测量时应满足如下要求:导线宜布设成直伸等边形状。导线网中结点与高级点间或结点与结点间的导线长度不应大于附合导线规定长度的0.7倍。
附合导线长度短于上表规定长度的1/3时,导线全长的绝对闭合差不应大于130 mm。
2.5 数据采集及需要注意的问题
按照预先规划的路径对荷花市场、小王府、什刹海会馆分别进行数据采集,室内空间扫描时注意与室外路径的锚点相结合,对于大型(较长)数据集采集时段,注意定期重新扫描已经扫描过的区域,这样可以减少漂移误差并创建更准确的扫描数据。其原理是当移动推车扫描系统经过其先前的路径时,该软件将会自动“识别”先前采集到的地图环境,并调整采集数据,减少推车扫描系统自首次通过该区域以来发生的漂移误差。
推扫过程中,相机每隔一段时间在即将触发拍照前会发出提示音,这时需要将推车式SLAM移动测量系统暂时停止推进,使得采集到的照片保持较高的清晰度,便于后期生成高质量的全景影像视图。
经过锚点时,按动锚定位按钮,仪器发出十字红外线,移动扫描设备,使得十字红外线对准锚点,按动设置锚点按钮,输入锚点编号,点击确认,这样则形成锚点文件,用于后期数据处理。
每个扫描时段结束即形成一个数据集(Dataset),需要注意的是,为了每个数据集的拼接精度,相邻数据集之间至少要共用2个锚点。
扫描完成后,通过扫描设备的IndoorViewer软件可以查看数据集中的图像信息及扫描质量。
2.6 数据处理
2.6.1数据导出
将设备的ssd磁盘驱动器或将设备通过网络连接到计算机,即可导出扫描数据。
2.6.2数据处理
利用SiteMaker软件将所采集的数据转换为点云、地图、全景影像。因为扫描设备在数据采集阶段采样率为5 mm,数据量很大,巨大的数据量在处理时需要大量的时间成本。因此,需要统筹考虑项目所需精度及数据量,对点云进行抽隙处理。本项目设置10 mm的分辨率,是考虑到较快处理速度与高点云分辨率。
处理点云时有三种模式:锐利边缘(Sharp_Edges)模式、平衡(Balanced)模式、平滑表面(Smooth Surfaces)模式。因本项目需要提取建筑平立剖面图,为保证边缘清晰,所以选择Sharp_Edges模式,使得处理后的点云有比较清晰的边缘,便于后续平立剖面图绘制。
选择使用SLAM锚文件,处理过程中,软件通过算法对点云着色、全景拼接,并使用锚文件坐标进行数据重建。
值得注意的是,数据采集过程中,有可能因操作员身高对部分目标对象产生遮挡,那么在数据处理时进行消除操作员遮蔽操作。反之,如果确定操作员没有产生任何遮蔽,则可以取消“使用操作员遮罩”设置。
动态对象滤除功能:扫描过程中,附近经过的人或其他物体也会在采集到的数据中产生伪像,通过动态对象滤除可以消除这些伪像,以便获得更加清晰的点云。滤除前后对比图见图4。

图4 动态对象滤除对比图
经过以上数据处理后,生成了2D平面图、质量图、点云数据、全景影像等,供后续使用。
2.6.3绘制平立剖面图
利用所生成的点云数据结合实景影像,很容易判断建筑物轮廓,在CAD软件环境下即可以绘制任意需要的平面图、立面图、剖面图及细部结构图(图5)。

图5 点云(a)及图件(b)
2.6.4精度分析
在绘制完成的建筑平面图中,任意选取8条边长进行误差分析(表2),量取边长di,通过全站仪双极坐标法串测所选取边长的房角坐标,量取边长Di,
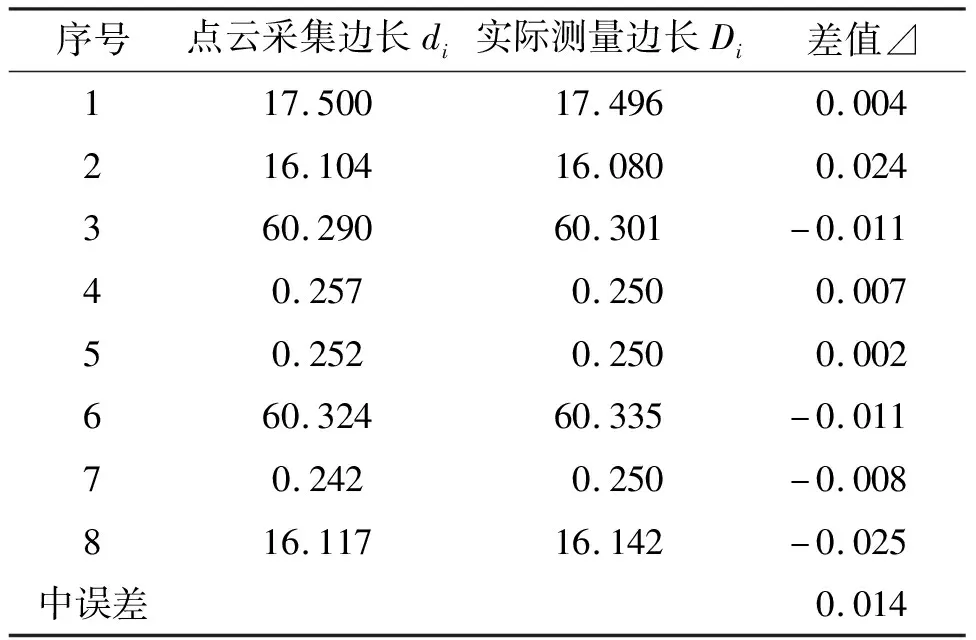
表2 误差分析表 单位:m
边长真误差⊿i=di-Di
3 提高数据获取精度方法分析
3.1 保持正确的推行姿态
数据采集时,使得SLAM移动测量系统运行姿态平稳,在转弯时应缓慢,不能猛拐。当相机拍照提示音响起时,应使SLAM移动测量系统处于停止状态。这样,可以获得高质量的点云及影像数据。
3.2 需要适当的光亮度
虽然激光雷达对光照度没有要求,但是为了后期处理时生成的全景影像的清晰度,仍然要求在数据采集时有适当的光照度,以保证六台相机能获得清晰的照片。
3.3 规划闭环路线使得数据自我纠正
当移动扫描系统经过其先前的路径时,系统将“识别”已扫描过的地图环境,它将对扫描数据进行纠正,以减少漂移误差。因此,推扫过程中的路线规划应该尽可能选择闭环路线。
3.4 利用锚点提高相对精度及绝对精度
另一个提高地图准确性的有效方法是SLAM锚点的利用。通过锚点坐标文件参与结算,在后处理时可以对漂移的点云数据进行纠正,以便提高扫描对象的绝对精度。
方法是每25 m左右、在路线拐点、室内通道尽头尽量均匀布设锚点。
4 结束语
推车式三维激光扫描系统实现了SLAM技术与三维激光扫描技术的融合,利用它可以实现对建筑物的连续性、批量式点云数据采集,同时可以实现实景影像获取,为逆向工程设计所需要的各种、各部位平立剖面、结构图、实景影像、三维模型的实现提供了解决方案。本文结合具体案例对这种数据采集及数据处理方法进行了阐述,分析了提高数据精度的方法,并与传统测量模式结果进行比对及精度分析,证明这种基于SLAM移动测量技术的数据采集方式是逆向建筑模型获取的可靠手段,将其应用于复杂、不规则的古建筑中具有无可比拟的优势[10]。然而,相对于地面型三维激光扫描系统而言,推车式三维激光扫描系统也有一定的局限性,其扫描距离较短,对于高层建筑立面测绘难以实现,为了保证精度需要提前布设较多的锚点。但是瑕不掩瑜,相信随着激光扫描头性能的提升以及后处理软件功能的不断完善,其必将具有广阔的应用前景[11]。
猜你喜欢
通信电源技术(2021年2期)2021-05-21
纺织科学研究(2021年1期)2021-03-19
电子技术与软件工程(2020年22期)2021-01-30
数字技术与应用(2020年12期)2021-01-22
移动通信(2020年5期)2020-06-08
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
中国公共安全(2017年7期)2017-10-13
电子制作(2017年9期)2017-04-17
河南科技(2014年10期)2014-02-27