基于E-R需求模型的特勤绿波协同控制系统设计
2022-01-22 06:05刘红业程泊静
装备制造技术 2021年10期
刘红业,华 实,程泊静
(1.湖南汽车工程职业学院,湖南 株洲 412000;2湖南省交通科学研究院有限公司,湖南 长沙 410000)
0 引言
城市的紧急救护、消防救援、特勤护卫等工作至关重要,其直接关系人民群众生命和财产的安全以及社会的稳定。目前救护车、消防车在执行紧急任务时容易受红灯的影响而耽误时间。在执行特勤护卫任务时虽然会提前进行交通管制和制定绿波带方案,但绿波功能需要在指挥中心提前设置和执行,无法根据车队的通行情况进行灵活调整,且对交通监控系统的布局程度和局域网的稳定性有较高的要求。针对当前特勤任务在交通中存在的问题,本文通过分析车载终端通信单元的需求,实现车载终端与交通信号控制机、车载终端与指挥中心信号控制系统的实时通讯,研究了基于E-R需求模型的特勤绿波协同控制系统,以保障紧急救护、消防救援、特勤护卫等任务的通行安全及任务执行过程中的最高通行权[1]。
1 特勤绿波协同控制系统结构设计
特勤绿波信号协同控制系统主要由车载终端(手机APP、平板)和路侧设备(信号控制机及检测设备)、交通信号控制中心系统三部分组成。车载终端集成了GPS导航与定位技术,能实时获取特勤车辆的位置信息传输给交通信号控制中心,同时车载终端电子地图上同步显示车辆位置、前方路口交通信号灯状态等。路侧单元可实时采集交通信号灯的运行工作状态,并上传至信号控制中心。交通信号控制中心的主要功能是处理来自道路监控摄像头的视频信息、路侧单元采集的信号灯状态信息、车载系统采集的车辆位置信息等,根据车辆位置数据计算分析车辆到达前方路口的时间,并将前方路口的信号灯状态传输给车载终端。
1.1 基于E-R模型的车载终端通信单元需求建模分析
R模型又称为实体-联系模型,是使用E-R图来描述现实世界的概念模型。E-R图通过实体、属性、联系等概念对现实世界进行基本抽象,建立实体与实体之间的联系建立更高层次的概念,称其为概念模型[2]。
特勤绿波协同控制系统的车载终端是采用交通信息动态交互的方式来保障紧急救护、消防救援、特勤护卫的快速通行服务,因此,通信单元是车载终端的重点。其主要功能是完成车载终端与路侧单元、车载终端与信号控制中心之间的实时信息交互。在设计车载终端通信单元的过程中,首先要对通信单元建立需求分析。需求分析是设计和构建车载终端通信单元的起点和关键环节,其结果的准确性直接影响车载终端功能的设计和实现。车载终端通信单元作用于道路交通环境中,因此其需求分析需要对城市道路交通现状进行调查,明确车载终端通信单元的需求和边界,并对调查数据资料进行概念结构设计,通过抽象认知建立基本概念模型,对抽象概念模型进行具体化,从而形成具体概念模型。E-R需求分析方法是对现实世界进行需求分析的一个有力手段。整个需求分析流程图如图1所示。
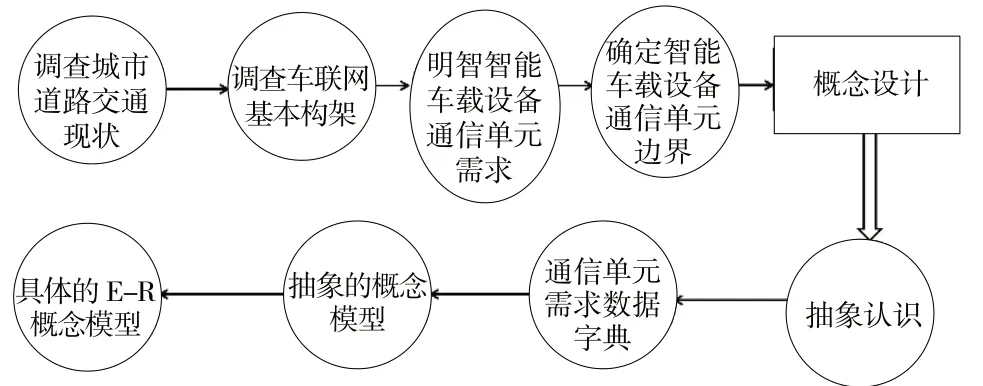
图1 交通流需求分析流程图
在需求分析的基础上,对车载终端系统进行抽象认知和具体化建立E-R概念模型,如图2所示。该模型存在4个实体,分别为车载终端通信单元、车载信息处理和控制单元、智能路侧设备、智能路侧设备软件单元、控制中心。车载终端通信单元分为两部分:车载终端与路侧单元之间的通信、车载终端与信号控制中心的通信。其中车载终端与路侧单元之间的通信主要负责与智能路侧设备进行车辆位置信息、行驶速度、交通信号灯状态等信息的交互。信号控制中心对车载终端采集的信息进行存储,并形成最佳的信号方案,尽量提高整个路网通行效率。
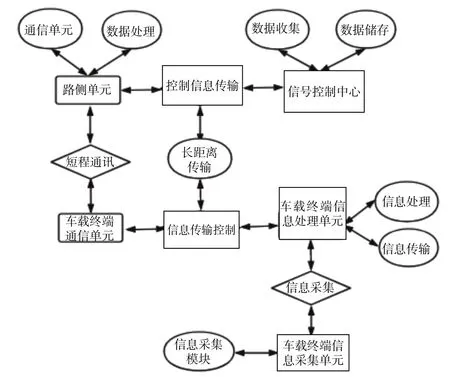
图2 车载终端E-R概念模型
1.2 基于E-R模型的车载终端通信技术选择
E-R需求模型展示了车载终端与路侧单元、交通信号控制中心之间的交互感知的过程。各实体之间需选取合适的通信技术来完成交通信息动态传输的目的,因此特勤绿波协同控制系统主要采用两种通信方式:(1)车载终端与路侧单元(信号控制机及检测设备)主要采用短程通信方式(DSRC),DSRC具有网络通信延时少、通信质量高等优点,适用于紧急特殊事件优先申请和应用。(2)车载终端与交通信号控制中心的通信方式主要采用4G无线网络,4G网络其具有覆盖范围广、带宽高、应用灵活性好等优点,适用于常规数据通信、非紧急信号通信等场景[3]。
2 特勤绿波交通信号协同控制系统功能设计
针对在遇到紧急救护、消防救援、特勤护卫等任务时,信号控制系统无法快速有效实现智能绿波控制的问题,该系统在设计上充分考虑交警特勤场景,在使用自动特勤路线功能时,特勤车辆只需携带经交警部门授权的车载终端(手机、平板)通过路口时即可实现一路绿灯快速通行。
2.1 车载终端通信单元功能设计
移动终端通信单元内置GIS地图和基于GPS卫星定位的手机控制系统。当车载终端的导航功能启动后,车载设备读取特勤车辆速度信息、通过GPS定位当车辆的地理信息。当特勤车辆距离交叉路口200m范围内,车载终端通过DSRC无线通讯和该路口的路侧设备进行数据传输。车载终端全程通过4G与信号控制中心系统通讯,可实现手动控制路口绿波、设置自动特勤路线以及路口智能绿波等功能。
2.2 信号控制中心通信单元功能设计
信号控制中心可设置多条特勤警卫路线、设置不同的手机APP用户控制权限,通过PC客户端远程强制干预路口信号灯状态,实现远程手动控制等功能;可灵活增加、修改和删除特勤路线,随时查看已执行特勤车辆的行车轨迹。中心平台系统除完成数据汇集、分析、转发外,还提供数据管理、数据存储、运行监控的功能[4]。
2.3 特勤绿波交通信号协同控制系统工作流程
特勤绿波信号协同控制系统主要由车载终端(手机APP、平板)、路侧设备(信号控制机及检测设备)和交通信号控制中心系统三部分组成。车载终端集成了GPS导航与定位技术,能够获取目标车辆的当前位置、行驶车速、规划路径等数据,并发送至交通信号控制中心,控制中心获取车辆的行驶信息则可处理车辆的优先通行请求。优先通行请求分为自动请求和手动请求两种方式。
自动请求是信号控制中心根据车载终端获取的目标车辆或车队的定位信息、规划行驶路径和行驶方向等信息,自动预测目标车辆到达前方交叉路口的时间,并获取该交叉路口的信号状态,向路侧设备及信号控制机提前发送优先通行请求,切换信号控制状态。同时信号控制中心将路口信号数据整合后传输给车载终端,可通过车载终端截面显示前方交叉路口的信号灯状态信息。
手动方式是指驾驶员通过操作车载终端向信号控制中心发送优先通行请求。当目标车辆距离交叉路口200m范围内,车载终端通过DSRC无线通讯和该路口的路侧设备进行数据传输。车载终端与路侧设备通讯的数据包含车辆的位置信息、行驶速度信息和规划路径信息等,信号灯接收到数据后判断目标车辆的行驶方向后中断路口信号控制机的控制,将该方向的信号灯放行绿灯,其他方向的信号灯则变为红灯,使目标车辆能不停车快速通过,待目标车辆驶离路口,车载终端和信号灯连接断开,信号灯重新由信号控制机进行控制。特勤绿波信号协同控制如图3所示。
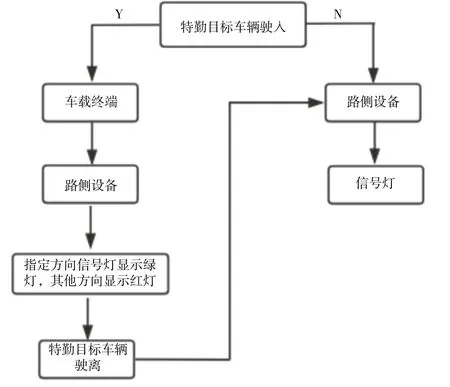
图3 特勤绿波信号协同控制流程
3 结论
针对城市在遇到紧急救护、消防救援、特勤护卫等任务时,无法快速有效地实现交叉口智能绿波的问题,本特勤绿波交通信号协同控制系统在功能设计上充分考虑到可能出现的应急需要,在使用自动特勤路线功能时,特勤车辆只需携带经交警部门授权的用户手机通过路口时即可实现一路绿灯情况,对于车队该系统还可实现“前车开道后车押尾”的双车特勤控制模式,只需头车及尾车分别携带授权手机即可保证车队一次性完整通过,彻底杜绝了特勤车队分离的情况出现,有效地提高了特勤控制效率及线路的安全性。其中路口智能绿波控制模式主要针对于消防及救护车辆特殊应急通行,授权用户使用该功能后无需设置特勤路线即可“畅通无阻”无需等待前方路口红灯。
猜你喜欢
铁道通信信号(2020年8期)2020-01-05
东坡赤壁诗词(2019年5期)2019-11-14
铁道通信信号(2019年1期)2019-01-16
铁道通信信号(2018年6期)2018-08-29
发明与创新(2016年34期)2016-08-22
西南军医(2016年5期)2016-01-23
西南军医(2015年5期)2015-01-23
西南军医(2015年4期)2015-01-23
吉林大学学报(工学版)(2013年1期)2013-08-16
中学生百科·小文艺(2009年8期)2009-11-24