
家猫爪垫减振机理及其在轮胎花纹中的仿生应用研究
2022-01-27 14:15王国林周海超刘从臻
振动与冲击 2022年1期
王国林, 梅 烨,2, 周海超, 刘从臻
(1. 江苏大学 汽车与交通工程学院, 江苏 镇江 212013; 2. 安徽工程大学 机械工程学院, 安徽 芜湖 241000)
动物在长期进化中形成对自然界的高度适应性和充分协调性,展现出多种多样的生物功能特性。例如猫科动物,在野外生存过程中,复杂的地形和捕捉猎物时的需要使得爪垫在与地面接触过程中进化出极强的减振生物功能特性,以削弱来自地面的冲击和实现运动静音特征。猫科动物减振生物功能的实现得益于长期进化过程中形成的独特长腕骨、跗骨和爪垫结构等。其中,爪垫作为猫科动物与地面接触的唯一身体部件,对其减振生物功能的实现起着至关重要的作用。近年来,国内外学者对于猫科动物爪垫的力学行为,如爪垫组织的非线性黏弹性特性和触地时的垂直地反力等已经做出了细致地研究。Alexander等[1]研究了家猫爪垫的动态弹性特性,发现了爪垫具有非线性弹性特性。Biewener[2]发现猫科动物运动时爪垫可以有效缓冲大小为其体重2倍~3倍的地面垂直反作用力。Chi等[3]认为猫科动物的爪垫在不同的运动过程中具有以下不同的力学特性:为了减小冲击力,爪垫应具有一定的柔韧性;为了传递地面支撑力,它们应具有一定的刚度。张晓鹏等[4]根据猫在落地时爪垫承受的垂直地反力变化规律,对爪垫的减振特性进行了理论分析,并构建了质量-弹簧黏弹性力学模型。然而,相关研究普遍关注于猫科动物的爪垫在减振生物功能实现过程中的量化特征,缺少深入的定性分析来揭示爪垫减振生物功能的实现机理。目前,仿生学理念逐渐促进人们运用生物界的规律、功能特征作为技术革新进步的依据,例如在现代轮胎花纹设计领域,大陆公司受豹爪垫接地运动过程中的强抓地功能实现机理启发研制出了一款仿豹爪花纹轮胎,大大提升了轮胎的抓地性能[5];王国林等[6]借鉴蝗虫脚掌表面的结构形态,提出轮胎胎面弧结构的仿生改型设计,协同提升了轮胎的抓地和磨损性能;周海超等[7-8]基于鲨鱼体表非光滑结构的减阻机理对轮胎的纵向花纹沟底面进行了改型设计,提出一种仿生非光滑结构花纹沟底设计,实现了轮胎抗滑水和噪声性能的协同提升。深入明晰生物功能特性的实现机理无疑会更有助于有效、合理地基于机理来耦合其他元素从而实现生物功能的仿生应用,提升应用领域的发展。同样地,猫科动物的爪垫所呈现出来的极强减振生物功能特性,值得轮胎、步行机器人、隔振系统等领域借鉴和仿生应用。
因此,本文选取普通家猫作为研究对象,通过爪垫的组织学和爪垫-地接触力学试验研究来揭示家猫运动过程中减振生物功能的实现机理,并结合仿生学理念提出仿家猫爪垫减振机理的轮胎花纹沟壁改型设计,以期通过仿生途径来优化轮胎胎面花纹的径向振动特性,从而降低轮胎花纹的振动噪声。
1 家猫爪垫的试验内容和方法
试验内容主要包括两个方面:家猫爪垫的组织学试验和其直线运动过程中的爪垫-地接触力学试验。其中,爪垫的组织学试验是在吉林大学工程仿生教育部重点实验室进行,爪垫-地接触力学试验是在江苏大学轮胎与车用橡胶研究生实验室进行。
试验对象为6只普通家猫。其中,2只家猫属于正常老死,用于爪垫的组织学试验;其余4只家猫来源于养猫人士,经医学临床检验后它们的爪垫部位轮廓完整且没有肌肉、骨骼等方面的疾病,主要用于直线运动过程中的爪垫-地接触力学试验。为了提升试验结果的可靠性与可信度,4只力学试验用家猫的年龄范围为4~8岁,体重范围是3.8~5.6 kg,肩高范围处于20~25 cm。相关力学试验在家猫完全适应试验环境和训练后开展。
1.1 爪垫组织学试验
试验时,首先从两只死亡家猫的脚掌爪垫中分别取出趾垫和掌骨垫部位的组织学样本;然后将样本放入4%的多聚甲醛溶液中保存24 h后,并予以常规石蜡包埋、切片处理,以从样本中提取5 μm厚的切片;最后,切片在蒸馏水中洗涤,酒精脱水,在60 ℃下石蜡包埋3 h,经用苏木精和伊红染色后在用医学生物显微镜(日本,Olympus IXplore SpinSR)进行试样的组织学观察。
1.2 爪垫-地接触力学试验
爪垫-地接触力学试验的目的是为了获取家猫直线运动过程中爪垫所承受的垂直地反力和爪垫在与地面接触过程中的平面内应变特征。试验时,利用美国Tekscan公司的Walkway压力毯来测量家猫直线运动过程中的爪垫垂直地反力。在完成对走道压力毯传感器的平衡和校准后,借助玩具、食物的引诱下实现家猫以不同的速度直线走过压力毯区域,以记录爪垫所承受的垂直地反力,并使用采样频率设定为200 Hz的高速摄影机(日本,Olympus i-SPEED 3)记录家猫的运动速度;利用采用美国CSI公司的VIC-2D设备来测量家猫直线运动过程中爪垫与地接触面内的应变特征,试验过程如图1所示,选用玻璃板为基板,在爪垫上完成黑点散斑制作后,让家猫在玻璃板上做直线行走。安装在基板下方的高速摄像机以200帧/s的速度捕捉爪垫运动图像,后续利用VIC-2D设备的数字图像相关技术对采样图像实现数字化处理,获得爪垫与地接触面内的应变特征及相关信息。
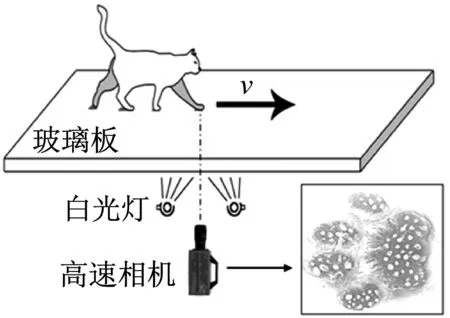
图1 爪垫接触应变试验示意图Fig.1 The contact strain test of claw pad
本文家猫作直线运动过程中“正常行走”步态的速度范围设定为0.4~0.8 m/s,其步态特征表现为家猫行走过程中,始终保持三条腿与地面接触;“对角小跑”步态的速度范围设定为1.0~2.0 m/s其步态特征表现为家猫行走过程中,始终保持对角两条腿与地面接触[9-10]。
2 家猫爪垫的减振机理研究
2.1 爪垫的组织学分析
通过家猫爪垫的组织学试验研究获得了如图2所示的爪垫掌垫区域和趾垫区域的组织学图像。对比发现,两只家猫爪垫的掌垫区域和趾垫区域都呈现出多层组织结构,从外向内由复层上皮层、真皮层和皮下组织层三层组成。图2中“I”区域所示复层上皮层可分为两部分:角质层部分主要承受运动时的摩擦和冲击,非角质层部分主要起保护层作用;真皮层(图2中“Ⅱ”区域)主要由致密的结缔组织组成,具有高强度的黏弹性特性;皮下组织层(图2中“Ⅲ”区域)主要由脂肪组织组成,呈现出网状纤维层结构,是三层中最重要的能量吸收层。另外,脂肪组织主要由脂肪细胞组成,主要由胶原膜分离,其力学行为被认为等同于充满不可压缩流体的静压系统。

(a) 掌垫区域

(b) 趾垫区域图2 爪垫的组织学结构特征Fig.2 Histological characteristics of claw pad
为了对比研究家猫爪垫的组织学多层复合结构的生物力学功能,借鉴文献[11]的研究方法建立了家猫趾垫的生物学模型及其对比模型,分别如图3(a)和3(b)所示,其中3(a)趾垫模型为三层复合结构,并分别赋予复层上皮层,真皮层和皮下组织层的材料参数,如表1所示。对比模型为均一化模型,赋予其复层上皮层的材料参数。随后,在Abaqus软件中创建地面支撑部件定义为离散刚体并与两个模型进行装配,地面赋予质量为1 kg,并对模型上表面施加位移约束,用于仿真地面以不同垂直初速度向上冲击模型,获取两个模型接触面的峰值力变化,结果如图3(c)所示。
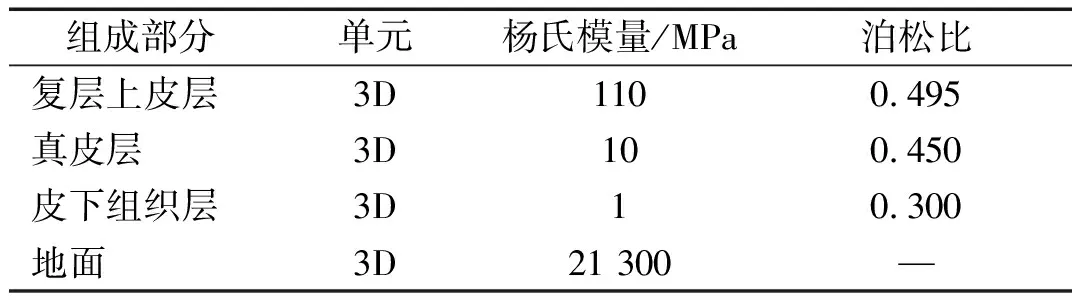
表1 有限元模型中的材料参数和单元类型
有限元结果表明:随着地面冲击速度的增加,两个模型与地面接触的峰值力增大,然而,趾垫模型的峰值力大小明显小于对比模型,并且随着速度增加,其峰值力增大的趋势也明显缓于对比模型,从而说明家猫爪垫组织学多层复合结构是有利于降低接触力,实现减振特性功能的。

(a) 趾垫模型

(b) 对比模型

(c) 仿真结果对比图3 爪垫组织学复合结构的仿真分析Fig.3 Simulation analysis of composite structure of claw pad
2.2 爪垫-地接触力学分析
利用压力毯获得了4只家猫直线运动过程中的前爪垫/后爪垫的垂直地反力峰值,根据式(1)计算,家猫在正常行走步态下,前爪垫的垂直地反力峰值占其体重的(64.4±8.7)%,后爪垫占其体重的(46.6±6.1)%;在对角小跑步态下,前爪垫的垂直地反力峰值占其体重的(85.4±9.6)%,后爪垫占其体重的(59.6±8.2)%。说明家猫在直线运动过程中,前爪垫在与地面接触过程中承受的垂直地反力要高于后爪垫的。相关研究也验证了试验数据和结果的有效性和可靠性[12-14]。为进一步分析家猫爪垫的力学特性,将爪垫分成掌垫和四个趾垫区域(趾垫区域按爪垫外侧到内侧方向依次为第2、第3、第4和第5趾垫),掌垫和四个趾垫的垂直地反力峰值分布情况如表2所示。由表2可知,家猫前爪垫各区域的垂直地反力峰值都高于后爪垫的对应区域峰值。掌垫区域承受的垂直地反力峰值是整个爪垫5个区域中的最大区域,特别是随着运动速度的加快,前爪掌垫的力学响应更加明显。因而,家猫在运动过程中,前爪的掌垫区域是研究其生物减振功能实现机理的关键区域。
(1)

表2 直线运动过程中的家猫前、后爪垫各区域峰值垂直地反力

图4 前爪垫接地区主应变分布(t总=0.300)
利用VIC-2D设备获取了家猫正常行走时的爪垫与地接触过程的主应变场和应变方向分布情况,如图4所示,图中X方向为家猫前进方向,Y方向指向爪垫的内侧方向。由图4可知,相比较于四个趾垫区域,掌垫区域在整个接地过程中的接触变形特征有着明显的区别。一方面,体现在主应变的变形方向上,四个趾垫区域的主应变方向在整个过程基本没有变化,均为以Y方向为主的拉伸变形;而掌垫区域在接触过成的前半段时间域内(0.18 s前)主要是以Y方向为主的拉伸应变,在接触过成的后半段时间域内主要以X方向为主的拉伸应变,即掌垫存在接触面内的摆动变形现象。另一方面,在主应变值的分布上,四个趾垫区域在整个过程中主应变值不断增大,如3rd趾垫和5th趾垫的内侧边缘处主应变值不断增大达到了15%左右,成为了趾垫的最大应变区域;而掌垫区域在整个接地过程中由于应变方向的时刻变化导致应变值在内侧和外侧区域交替出现先增大后又减小现象,并最终形成以掌垫后侧区域为主要变形特征的主应变分布,最大主应变值范围为9%左右,明显低于趾垫区域的最大主应变值。
为进一步阐明掌垫区域摆动变形的作用效果,提取了图4中的3rd趾垫和掌垫区域接地过程中在X和Y两个方向上的应变值随时间变化趋势,结果如图5所示。考虑家猫爪垫在X或Y方向上均主要以拉伸变形为主,且爪垫的不可压缩性使得其在X或Y方向的局部压缩变形会在Y或X方向上表现为拉伸变形,因此,在计算X和Y方向上的应变值时,先分别筛选出3rd趾垫和掌垫区域在X方向和Y方向大于零的应变值,再对筛选值取平均,即可用于表征各自区域在X和Y两个方向上的应变值,记作Ex和Ey。由图5可知,由于3rd趾垫区域在接地过程中的变形方向恒定,Ex和Ey均呈现出累计增大趋势;而掌垫区域由于摆动变形的作用,Ex和Ey并没有表现出随时间不断增大的趋势,各自表现出波动变化且彼此间的趋势相反,即Ex增大或减小时,Ey相应为减小或增大,实现将来自地面的冲击能转变成应变能并通过X和Y方向上的交替变形中耗散,达到减振的效果,实现了优于趾垫区域的减振效果。

(a) 3rd趾垫区域
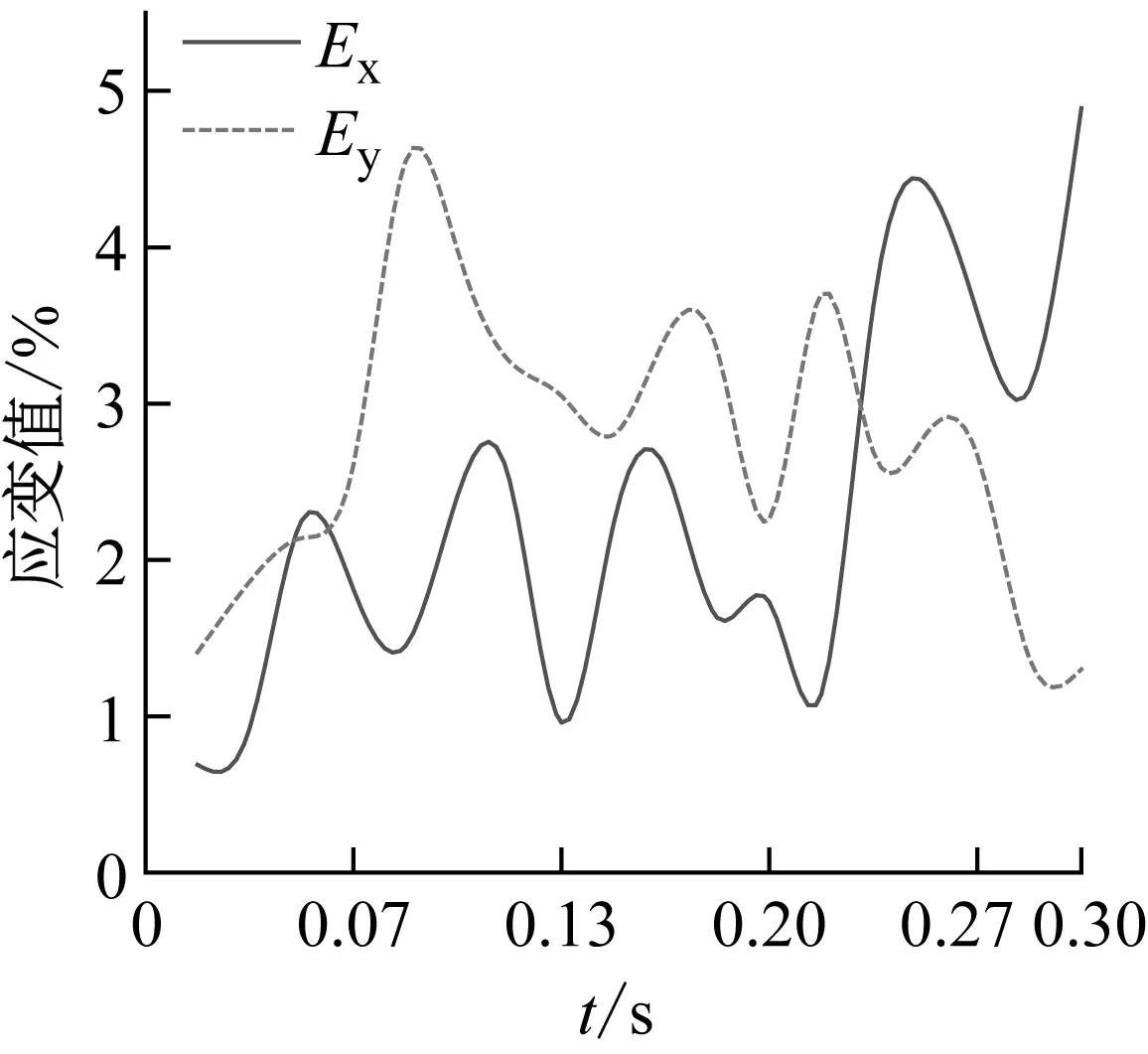
(b) 掌垫区域图5 3rd趾垫和掌垫区域X和Y方向应变值时域分布Fig.5 Distribution of strain values in X and Y directions
通过对比趾垫和掌垫区域的主应变值等特征,说明掌垫区域在整个接触过程中表现出了更强的冲击衰减效果。结合掌垫区域的应变方向特征等变化规律,反应了掌垫区域通过前-后、左-右摆动变形来实现对地面冲击的削弱达到减振的目的。
2.3 爪垫减振生物功能的实现机理
试验研究表明,家猫爪垫在与地面接触过程中表现出的减振生物功能是通过爪垫的微观组织结构特性和其运动过程中的步态特征耦合实现的。
一方面,家猫爪垫的组织学结构表现出的三层复合结构,且分别具有不同的力学特性,如复层上皮层的刚弹性[15]、真皮层的黏弹性以及皮下组织层的超弹性。这种由不同力学特性结构的复合结构,使得家猫爪垫更易于实现从外到内的冲击力衰减以及有效地吸收运动过程中的振动能量[16],利于生物减振功能的实现。
另一方面,家猫在正常行走时,爪垫特别是掌垫区域表现出接触面内前-后、左-右摆动变形特征,有助于削弱地面的冲击能,是家猫爪垫为实现减振特性而形成的自主适应性调整在力学上的表征。
3 轮胎花纹仿生设计与分析
3.1 轮胎花纹仿生设计
轮胎振动特性是影响汽车NVH的重要因素[17],改善轮胎振动特性的有效途径之一是提升轮胎胎面的径向减振特性。因此,借鉴家猫爪垫的减振机理,耦合仿生学领域公认具有良好缓冲吸能特性的仿蜂巢六边形结构[18-19],以205/55R16型乘用车轮胎为研究对象,进行胎面花纹沟壁的仿生改型设计,以期通过仿生改型设计将家猫爪垫的减振机理应用于轮胎产品,达到改善轮胎运动时的振动特性,提升汽车NVH性能的目的。
如图6所示,205/55R16型乘用车轮胎胎面采用非对称花纹设计,其中,中间区域胎面为纵向沟槽分割胎面形成的纵向花纹,其径向断面呈等腰梯形状。该轮胎中间胎面区域是胎面弧的制高点区域,最先与地面接触承受冲击载荷作用,也是对整个胎面振动噪声特性贡献度较大的区域[20]。因此,选取中心区域胎面,利用仿蜂巢六边形凹坑结构设计来实现家猫爪垫组织结构的吸能特性,采用花纹沟壁两侧非对称布局的方式让轮胎滚动过程中实现类似家猫爪垫-地接触中的摆动变形特性,完成对中间区域纵向花纹沟壁的仿家猫爪垫减振机理的仿生应用改型设计。通过结构参数DOE分析后,确定了最佳仿生结构如图6所示,其中,六边形边长为1.5 mm,凹坑深度9.5 mm,左右两侧凹坑高度差为2 mm。

图6 轮胎花纹沟壁的仿生改型设计Fig.6 Bionic modification design of tread groove wall of tire
为分析仿家猫爪垫减振机理的仿生轮胎在径向上的减振特性,利用Abaqus软件对其分别进行了隐式和显示有限元仿真分析,并通过获取胎面接地特征参数与原始轮胎进行对比来进行分析。同时,为消除仿生结构设计等因素影响和说明摆动变形在减振过程中的贡献度,增加一组中间区域纵向花纹沟壁采用相同结构参数的仿蜂巢六边形结构但对称布局的花纹结构设计作为对比轮胎进行对比分析。
3.2 仿生轮胎有限元分析
3.2.1 有限元模型的建立
利用Abaqus软件建立轮胎有限元模型过程如图7(a)所示。建模时将轮胎断面图导入Hypermesh软件中进行胎体的二维网格划分,并将胎体断面网格进行旋转后得到对应的单节距3D胎体网格模型;其次,进行单节距花纹模型的网格划分,并采用Abaqus中的绑定约束(*Tie)命令来对胎体和花纹模型进行贴合,形成单节距轮胎网格模型;之后,将单节距轮胎网格模型进行旋转形成整胎网格模型。胎体二维模型的橡胶单元类型为CGAX3H和CGAX4RH,Rebar单元类型为SFMGAX1,模型中共计1 862个节点,1 619个单元。胎面花纹的橡胶单元类型为C3D6H和C3D8RH。通过建模分别获得了原始轮胎、仿生轮胎和对比轮胎的有限元模型,其中,它们中心区域胎面的纵向单截距花纹块有限元模型分别如图7(b)、(c)、(d)所示。
3.2.2 材料参数获取及本构模型选择
为准确描述橡胶材料的非线性力学,首先采用GOTECH AI-7000M型拉伸试验机参照GB/T2941—2006标准来对胎面胶材料进行单轴拉伸试验;其次,将试验测得的橡胶材料单轴拉伸试验数据输入Abaqus软件中,并采用不同类型的橡胶材料本构模型来拟合试验数据,拟合结果如图8所示。对比发现,采用Yeoh模型的拟合精度较高。因此,本文选用Yeoh模型来描述橡胶材料的力学特性。
3.2.3 仿真分析条件
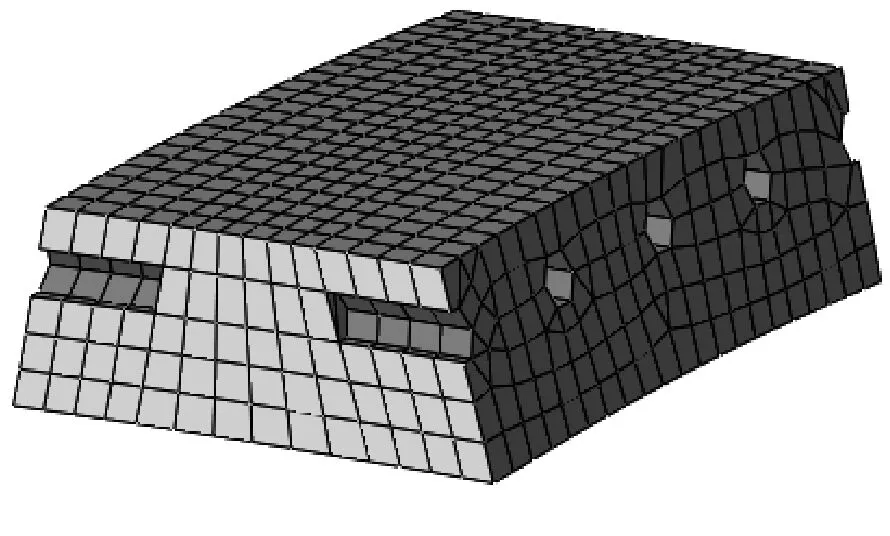
将轮辋和路面简化为解析刚体,采用文献[21-22]的方法,在Abaqus中完成对轮胎的充气、静态加载以及隐式和显示滚动分析。仿真分析时轮胎气压为额定气压0.24 MPa,载荷为额定载荷4 021 N。轮胎的有限元仿真分析模型如图9所示,由于后续分析需要单独提取轮胎各区域胎面的接地特征参数,因此把路面分为连续的5个区域来与各区域胎面相对应。非对称轮胎胎面区域由轮胎外侧到内侧可划分为外胎肩区域1、外过渡区域2、中间区域3、内过渡区域4和内胎肩区域5共计5个胎面区域。有限元模型坐标系以前进方向为X轴正方向、沿轴向由轮胎外侧指向内侧为Y轴正方向、垂直指向轮辋中心方向为Z轴正方向。
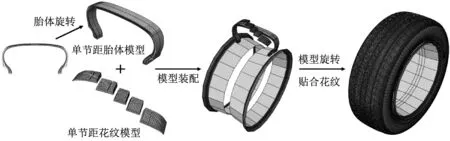
(a) 有限元模型建立过程

(b) 原始轮胎

(c) 仿生轮胎
(d) 对比轮胎图7 有限元建模过程及3种轮胎中心区域胎面的单截距结构模型Fig.7 The finite element modeling process and single intercept structure model in center area of three tire tread

图8 胎面橡胶本构模型拟合曲线Fig.8 The constitutive model fitting curve of tread rubber

图9 轮胎有限元仿真分析模型Fig.9 The finite element simulation analysis model of tire
3.2.4 有限元模型的验证
文中采用的有限元模型精度已通过大量试验得以验证[23-24],为进一步验证轮胎有限元模型的有效性,采用轮胎综合强度试验机进行轮胎三向刚度测试,试验方法参照GB/T 23663—2009《汽车轮胎纵向和横向刚性试验方法》[25]。轮胎三向刚度仿真值与试验值的对比结果如表3所示。结果表明:轮胎三向刚度仿真值与试验值的误差均在7%以内,验证了轮胎有限元模型的有效性。
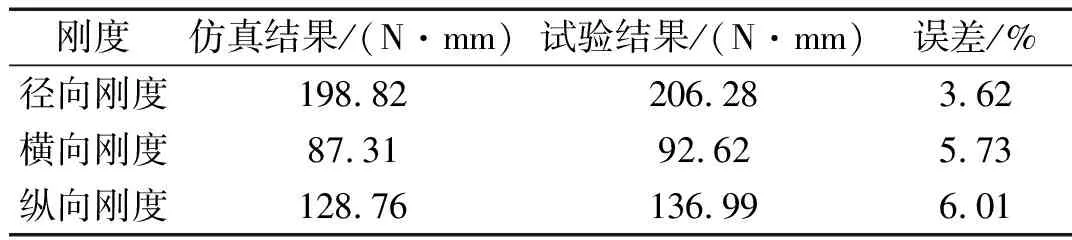
表3 刚度仿真值与试验值对比结果
3.3 有限元分析结果及讨论
为表征3种轮胎与路面间的接触作用力,比较3种轮胎径向减振特性优劣程度,一方面,通过 Abaqus 中的 *STEADY STATE TRANSPORT 命令进行3种轮胎自由滚动仿真分析,提取了轮胎自由滚动时接地各区域胎面的径向力、侧向力和接地压力分布特征;另一方面,借助Abaqus/Explicit方法进行了轮胎60 km/h下的滚动仿真分析,并提取了轮胎稳态滚动一周后的路面时域内径向激励力。
3.3.1 轮胎自由滚动下的接地力分析
表4列出了3种轮胎自由滚动下整个胎面和5个区域胎面的接地径向力和侧向力。由表4可知,与原始轮胎相比,仿生轮胎和对比轮胎的中间区域胎面的接地径向力均有所降低,分别降低了4.6%和2.6%;对于其他4个区域胎面,除对比轮胎的外过渡区域和内过渡区域胎面的接地径向力相较原始轮胎有所增加外,3种轮胎其他区域胎面的接地径向力基本保持一致,如图10所示。与原始轮胎相比,仿生轮胎整体接地径向力降低了37.21 N,对比轮胎整体接地径向力降低了5.11 N。此外,3种轮胎自由滚动时轮胎的侧向力基本保持一致。
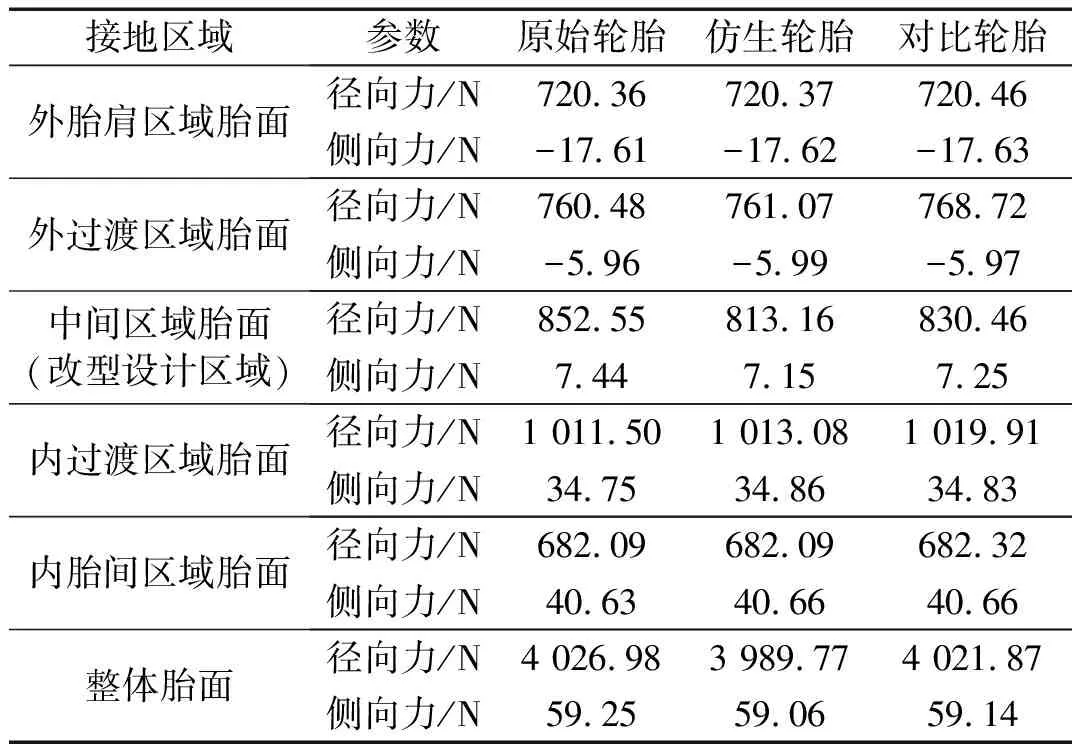
表4 3种轮胎自由滚动时胎面径向力和侧向力对比

图10 3种轮胎各接地区域径向力对比Fig.10 Comparison of radial forces of of tyres in regions
可见,仿生轮胎滚动时,中间区域胎面花纹通过摆动变形有效削弱了地面对胎面的冲击,通过降低中间区域胎面的接地径向力来实现降低了整体接地径向力;而对比轮胎在滚动时虽然降低了中间区域胎面的接地径向力,但两侧相邻区域胎面的接地径向力反而增大,中间区域胎面对冲击的响应转移到了两侧相邻区域胎面,最终使得整体胎面的接地径向力降低程度小于仿生轮胎。
3.3.2 轮胎自由滚动下的接地压力分析
图11示出了3种轮胎滚动过程的胎面接地压力分布。由图11可知,与原始轮胎相比,仿生轮胎和对比轮胎的接地压力峰值均得到明显降低,分别从0.850 9 MPa降低到0.619 5 MPa和0.737 3 MPa。同时,由图11还可知,原始轮胎和对比轮胎的接地压力峰值都出现在中间区域胎面花纹块处,而仿生轮胎的接地压力峰值出现在外胎肩区域胎面花纹块处,由此说明中间区域胎面作为改型设计区域,仿生轮胎实现了接地应力的有效削弱。此外,从轮胎胎面的接地压力分布来看,相较于原始轮胎,仿生轮胎和对比轮胎在外过渡区域、中间区域和内过渡区域的胎面接地压力值呈现出整体增大趋势。根据轮胎接地压力偏度值计算式(2)[26]计算得出原始轮胎、仿生轮胎和对比轮胎的接地压力偏度值分别为0.412 MPa、0.386 MPa和0.391 MPa。由此说明,仿生轮胎和对比轮胎,特别是仿生轮胎,有效改善了接地压力分布不均匀分布情况,有利于改善轮胎滚动过程中的磨损特性。

(a) 原始轮胎
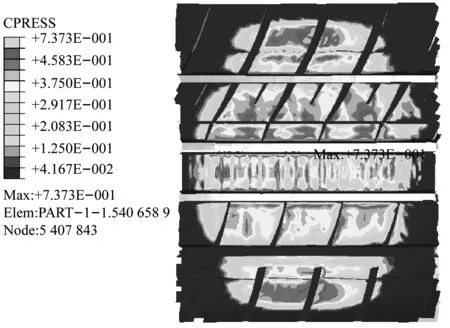
(c) 对比轮胎图11 3种轮胎滚动过程接地压力分布图Fig.11 The distribution of pressure during tire rolling
(2)

3.3.3 轮胎显示滚动下的路面径向激励力分析
轮胎振动噪声与轮胎滚动下的路面径向激励力密切相关,且激励力值越大,轮胎的振动噪声值越高。为表征3种轮胎滚动时路面的径向激励力特性,分别提取3种轮胎显示滚动分析稳态滚动一周后的整个胎面路面时域内径向激励力,结果如图12所示。对比发现,相比较原始轮胎,仿生轮胎和对比胎面都不同程度的降低了轮胎滚动时的路面径向激励力;特别是仿生轮胎的径向激励力的峰值处降低程度更为明显,表明了仿生改型结构有利于减振的特性。同时通过仿生轮胎整个胎面区域承受的路面激励力最小,特别是降低了激励力的峰值,因此,仿生轮胎对轮胎的振动噪声特性有着明显的改善。
为了明晰仿生轮胎和对比轮胎在降低路面径向激励力上的差异性原因,图13示出了路面激励力的频域结果,由图13可知,仿生轮胎相较于对比轮胎在500 Hz内的峰值显著降低,且出现峰值的峰数量减小,特别是在10~40 Hz,160~190 Hz以及300 Hz附近。进

图12 3种轮胎胎面的路面径向激时域励力分布对比
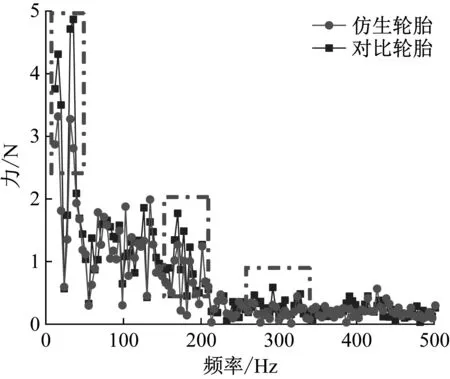
图13 仿生轮胎、对比轮胎路面径向径向激励力频谱对比
一步说明了仿生轮胎可以通过摆动变形特征来削弱冲击,从而有效降低500 Hz频率范围内的振动波幅值,增强轮胎的径向减振特性。
4 结 论
(1) 通过试验探究,发现家猫爪垫多层的组织结构通过接地过程中爪垫接触面内的摆动变形力学运动实现其生物减振功能特性。
(2) 基于家猫爪垫的减振机理提出针对轮胎中间区域处花纹沟壁的仿生改型设计,有限元仿真分析结果表明,仿生改型设计轮胎可有效降低接地压力偏度值和胎面-路面间径向激励力,从而可以改善了轮胎滚动时的胎面磨损和振动噪声特性。
猜你喜欢
轮胎工业(2022年10期)2022-12-30
轮胎工业(2022年5期)2022-07-20
轮胎工业(2021年9期)2021-07-20
红领巾·成长(2021年2期)2021-06-20
大自然探索(2021年2期)2021-04-02
诗潮(2020年6期)2020-06-24
中学生物学(2020年8期)2020-03-08
时代邮刊·下半月(2019年4期)2019-09-10
阅读与作文(小学高年级版)(2018年9期)2018-10-25
恋爱婚姻家庭(2018年33期)2018-07-22
