基于剖面声呐的海底微地貌观测研究*
2022-01-27 10:58田壮才彭子奇贾永刚张明伟
古地理学报 2022年1期
田壮才 彭子奇 贾永刚 张明伟
1 中国矿业大学深部岩土力学与地下工程国家重点实验室, 江苏徐州 2211162 中国海洋大学山东省海洋环境地质工程重点实验室, 山东青岛 2661003 广东省海洋发展规划研究中心, 广东广州 5102204 青岛海洋科学与技术国家实验室海洋地质过程与环境功能实验室,山东青岛 266061
1 概述
海底地貌是指海水覆盖下的固体地球表面形态,是各种形态特征、成因类型、分布格局及其发育过程的综合,常见的有海底沙波地貌、海底滑坡地貌和海底液化地貌等。由于海水的覆盖,海底地貌难以直接观察(赵晓明等,2018)。海底地貌与工程地质灾害、资源勘探、陆架沉积物输送等密切相关,海底沙波的内部结构记录了不同的沉积阶段,代表着特殊的水动力—沉积物进程(李勇航等,2021a)。此外,海底沙波与古气候、古环境、古岸线的重建与反演密切相关,对海底地貌的研究不仅能预防工程地质灾害,还有助于古环境和沉积过程的重建(李勇航等,2021b)。
在近岸海域,海洋中广泛分布着各种海洋工程设施,它们的安全性往往与海底地貌的演变息息相关。当有较强的外力作用时海底会发生地质灾害,进而引起海底地貌较大变化,会对海底管线、海底电缆、港口航道、海上平台、海上风电基础设施等海洋工程设施造成危害,极易导致海底管线等悬空或掩埋,甚至导致海底管线的断裂,进而造成巨大的生命财产损失与潜在的海洋环境灾难(Némethetal., 2006;李泽文等,2010;Blondeaux and Vittori,2016;孙永福等,2018)。实时获取海底地貌数据可以为海洋工程设施的建设提供基础数据,为地质灾害提供预警,对港口、航道以及海岸带的防护具有重要意义(彭子奇等,2020)。
海底地貌观测研究的进展与观测方法的发展密切相关,已有的海底地貌观测方法主要包括绳索测量技术、潜水测量技术、测深仪测量技术、水下摄影测量技术、侧扫声呐技术、浅地层剖面技术、单波束与多波束测量技术、高分辨率地震探测技术、海底原位观测技术和卫星遥感观测技术等(Langhorne,1982)。中国最早关于海底地貌方面的研究始于马廷英(1941)。20世纪50年代以后,随着回声测深仪在中国得到广泛应用,中国先后开展了大量海底地貌调查研究,并取得了一定成果。1958年,秦蕴珊基于大量测深仪数据较系统地研究了中国近海大陆架地貌; 陈吉余基于测深仪数据较早地系统论述了长江三角洲地貌发育的规律(郑勇玲等,2012)。
海底地貌原位观测技术一般是使用坐底声呐观测系统,通过调整观测参数来获取测区一定范围内海底地貌形态特征数据,能够长时间、持续并实时地获取一定时间间隔的观测数据。海底地貌原位观测技术开始于20世纪80年代,广泛应用于90年代,通过将声呐观测系统搭载在观测平台上进行测量工作(Rubinetal., 1983;Favali and Beranzoli,2006)。关于海底地貌原位观测技术的研究始于1983年,Rubin等(1983)为了观测海底微地貌使用小巧型侧扫声呐和旋转系统发明了早期的图像声呐观测系统。随后多位学者使用类似的图像声呐系统进行了测量工作, 早期声呐系统为固定频率,无法根据实际需求进行调整,观测范围小,噪点多,精度低。同时,由于采用人工测量的方法提取声呐数据图像中海床形态参数,往往会导致数据准确度偏低。20世纪90年代末期,随着声学仪器和电子科学技术的进一步发展,声呐观测系统实现了一次飞跃。新一代的声呐观测系统是当前海底地貌原位观测的主要设备,相对而言其功能更加强大,一般可以用于固定剖面或三维地貌成像测量,观测系统精度较高。而频谱分析技术的应用使得声呐数据的处理更加规范化,数据准确性更高。陈景东等(2014)使用声呐观测系统和水动力观测系统在江苏如东潮间带对海底微地貌进行了观测研究,研究发现潮周期内海床形态特征变化显著,海床形态与近底流速存在一定相关关系;马小川(2013)和柏秀芳(2008)使用声呐观测系统对南海的沙波地貌形态进行了观测研究。综上所述,海底地貌声呐原位观测技术精度较高,适用性较广,既可以应用于潮间带等浅水区域又可以应用于南海等深远海,同时正朝着更高精度、更规范化的方向发展。但当前声呐观测系统精度不一,仅可以用于固定剖面或三维地貌成像测量,且没有水声通讯模块。因而,研发一套海底地貌特征原位长期观测系统能扩展中国的海底地貌原位观测手段,具有重要意义。
本研究基于多频率数字剖面图像声呐(简称剖面声呐)传感器,增加供电系统、采集系统和数据分析系统,以完善海底地貌原位长期观测系统,观测系统可以用于获取观测区域内海底地貌数据。完善观测系统后,通过室内实验来验证观测系统的可行性和数据准确性。并在此基础上将该观测系统应用到实际原位观测工作中,以揭示海洋动力作用下海底地貌的演变过程,为确定灾害事件的发生机制提供数据支撑,为海洋工程设施的建设提供数据参考。
2 海底地貌原位长期观测系统设计
2.1 观测系统组成
海底地貌特征原位长期观测系统由可以采集数据的剖面声呐传感器、自容式存储数据的采集系统和供电系统3部分组成,为了保证观测系统能够实时传输数据,在采集系统中增加水声通讯机模块。同时,增加了上位机直连模块,可以高效地从采集系统中提取出观测数据并解译数据。
1)剖面声呐传感器。海底地貌特征观测系统的传感器单元是整个观测系统的核心部分,采用了加拿大IMAGENEX公司生产的881A型数字多频率剖面图像声呐(简称剖面声呐)。该型号剖面声呐传感器在国外应用较多,性能较为稳定,既能够获得全方位的高分辨率三维海底地貌图像,又能够获取固定测线上的二维剖面图像。剖面声呐传感器是一款可编程、多频率的数字图像声呐,使用的是以太网接口,工作最大水深3000m,盲区为150mm,能够在1~100m范围内达到每秒100次的发射次数,分辨率高达2mm。
2)采集系统。本研究设计的采集系统是由外部金属密封舱体和内部控制系统组成。按照现有设计理论及经验,球型壳体承压能力最好,其次是圆柱型容器,方形容器最差。从制造角度来看,球型容器制造工艺特殊,加工难度较大,制造成本高。而圆柱型容器加工制造很方便,精度用常规手段即可控制,被广泛用来制作水下密封舱。因而本研究的控制系统设计为长方体型,采用圆柱体型密封舱。舱体顶部配备有4个接插口,用于数据传输、供电和水声通讯等;舱体侧面配备有2个凹槽,用于固定采集装置,通过特制的卡扣可以将采集仪固定在观测平台上。
3)供电系统。本研究采用的供电系统为锂电池组电池舱,由密封舱和内部锂电池组组成。声呐传感器正常工作时,电流为24V和0.5A,而观测系统设计最长观测时间3个月,每天采集2次,每次采集时间20min至2h,同时采集系统也需要电流供应,基于以上这些因素,内部锂电池组由锂电池串联组装而成,设计容量为100Ah,输出电压27V,内部安装有稳压模块,能保证电池舱持续输出24V的直流电流。
2.2 观测系统工作原理与工作模式
海底地貌特征原位长期观测系统属于声学仪器范畴,采用回声测距原理。声呐传感器探头发射出声波信号,当声波信号到达海底后会发生反射,回波被换能器接收,通过发射和接收声波的时间差以及实际声速可以计算得到海底任意一点与声呐探头的相对距离(图 1)。接着,以声呐探头为原点,以向下方向为z轴正方向,以初始测线方向为y轴,垂向为x轴建立三维空间坐标系,通过对回波信号方向和计算得到的相对距离的进一步加工处理和计算,可以得到海底各点相对于声呐探头的位置,即海底各点在建立的三维坐标系中的三维坐标。最后,通过三维数据处理软件进一步处理可以得到海底地貌图像。同时,选取固定的x值或y值,也可以利用二维软件绘制得到yz或xz剖面数据图像,进一步可以分析出随时间的剖面形态变化。

图 1 声呐观测系统工作流程示意图Fig.1 Schematic workflow of sonar observation system
优化集成后的观测系统具有旋转测量(又称全方位角测量)和不旋转测量(又称直线测量)2种可设置的工作模式。旋转测量时,声呐每次工作最少需要旋转1周(360°),角度间隔0.3°~3°。而不旋转测量是根据实际情况和观测需求选定一个角度,始终只测量该角度下的剖面数据。
3 观测系统可行性实验研究
3.1 标志物检验实验设计
为了验证该观测系统能够反演出地形地貌特征,作者设计了标志物检验实验。实验在山东省海洋地质工程重点实验室的仪器检测池中进行,该仪器检测池长度为3m,宽度为1.6m,高度为1.2m,自带有梯形搭载平台和固定仪器的金属卡扣,通常用于检测仪器状态的实验测试。实验采用了2种标志物,分别为正方体和圆柱体标志物(图 2)。正方体标志物为无色透明,由亚克力板制作而成,3条边边长均为13cm。圆柱体标志物为黑色,由塑料制成,直径为26cm,高度为51cm。
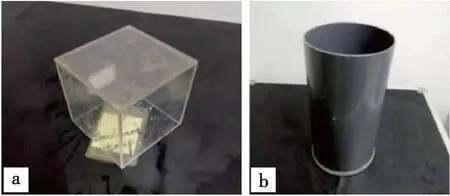
a—正方体标志物,材质为亚克力板;b—圆柱体标志物,材质为塑料图 2 室内水池实验人工标志物实物照片Fig.2 Photos of artificial markers in indoor pool experiment
实验时,仅使用声呐传感器和采集仪,采集仪与电脑直连由电脑控制采集过程,可以实时调整声呐探头采集模式、采集时间间隔和采集范围等参数。同时通过实验室供电代替供电系统直接进行供电,供电线与高精度可调直流稳压电源连接,通过调整输出参数可以将常规的交流电流转化为观测系统可用的24V、0.5A的恒定直流电流。
首先将剖面声呐传感器安装固定并放置于检测池中央(图 3),并对供电线和数据连接线等进行连接,确保数据传输通路正常,剖面声呐传感器距底0.57m。为了确保声呐探头发射的声波到达标志物表面后能够产生有效回声信号,将2标志物分别放置于声呐探头两端,正方体标志物无盖侧朝下,圆柱形标志物水平放置,无盖侧远离声呐探头,2标志物与声呐探头水平距离均为0.45m。随后向检测池中缓慢注入自来水,直至水深0.8m。

图 3 室内水池实验仪器布置(2标志物分别放置于声呐探头两端,正方体标志物无盖侧朝下,圆柱形标志物水平放置)Fig.3 Instrument layout in indoor pool experiment(Two markers were placed at both ends of the sonar probe. Cube markers were uncapped side down,and cylindrical markers were placed horizontally)
实验开始前需对声呐传感器和采集系统进行检查,打开控制软件win881A对声呐进行初步调试,以检查声呐探头是否正常工作。测量近距离小型标志物时,扫描半径一般选择1~4m(步长1m),扫描半径越小数据精度越高。设置接收声波强度时需要进行多次调试以选择合适数值,接收声波强度一般与声呐距底距离和水体环境等相关。检查完毕后,对声呐进行了参数设置并开始实验。
3.2 标志物检验实验结果与分析
3.2.1 不旋转测量结果


图 4 室内水池实验圆柱体标志物二维剖面图像Fig.4 Two-dimensional profile image of cylindrical marker in indoor pool experiment
从图4可以看出3组声呐数据曲线基本一致,说明声呐数据稳定性较好。同时,3组数据曲线的最大高程与实际标志物高度线相交,说明声呐测得的圆柱体标志物的最大高度数据与实际数据一致,且对应的x=-0.45m与实验前测得距离0.45m一致。剖面声呐在测量圆柱体标志物时(图 5),标志物仅有1段弧面(正对面)正对着声呐,这一部分能够接收并反射声呐发射的声波信号,因而会有相应的剖面数据即1段弧线数据,而其他部分由于正对面的阻挡不能产生有效回声信号。标志物的声呐剖面图像是由1段弧线和2条倾斜线段组成,拐点在高程为26cm和12cm附近,图像组成及拐点位置与预期结果一致,说明声呐数据较准确。

图 5 声呐测量圆柱体标志物工作原理示意图Fig.5 Measurement schematic diagram of cylinder markers by sonar
图 6为正方体标志物的二维剖面数据图像,图中横纵坐标含义同图 4。图中标志物高度直线(粉红色直线)为正方体标志物最高高度(正方体边长)为13cm,正方体标志物反射数据在x=0.4~0.75m段,左右两侧均为检测池池壁。从图中可以看出3组声呐数据曲线变化趋势趋于一致,说明声呐数据稳定性较好。同时,3组数据曲线的最大高程与实际标志物高度曲线相交,声呐测得的正方体标志物的最大高度数据为0.132m,与实际数据0.130m相近,对应的x=0.455m与实验前测得距离0.45m相近,说明声呐数据较为准确。图中正方体标志物的声呐数据由1条近垂直线段、1条倾斜线段和1条水平波浪线组成,倾斜线段是由于标志物正对面的阻挡产生的,近垂直线段高度即为正方体标志物的边长,水平波浪线长度为正方体标志物的长度(标志物边长),图中数据测得的水平波浪线长度为16cm,与实际边长13cm相差较大,这主要是由于声呐0°剖面的测线与正方体标志物不垂直,导致测得的平面长度不等同于边长。
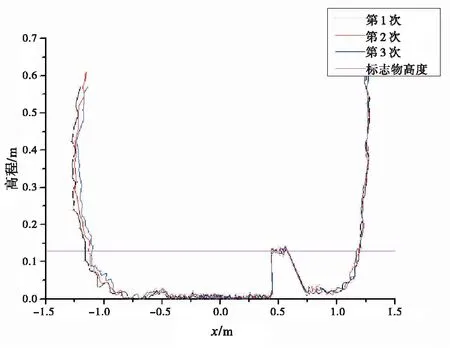
图 6 室内水池实验正方体标志物二维剖面图像Fig.6 Two-dimensional profile image of cube marker in indoor pool experiment
3.2.2 三维旋转测量结果
通过旋转测量获得大量的标志物三维立体数据,本研究基于这些测量数据绘制了标志物的三维图像(图 7,图 8),以确定声呐数据的准确性。图中右侧为高程色标,0m为水底面高度;图中x轴、y轴分别对应声呐自定义三维坐标系中的x轴和y轴,x=0,y=0处为声呐探头处于平面中的位置。从 图 7 中可以看出存在有2个明显的物体,这说明声呐扫描到了标志物。结合 图 8 可以发现,左侧为1个近似正方体的物体,形态上与正方体标志物近似一致,通过对数据的进一步计算得到了该物体的长宽高均接近13cm,与实际的正方体标志物的数据一致,这说明声呐在扫描正方体标志物时数据正确性较好。右侧物体对应的是圆柱形标志物,其上部是1个曲面,对应着标志物的正对面(详细解释见图 5),变化趋势与实际情况基本一致,其最高高度为26cm,长度为51cm,与实际高度一致。
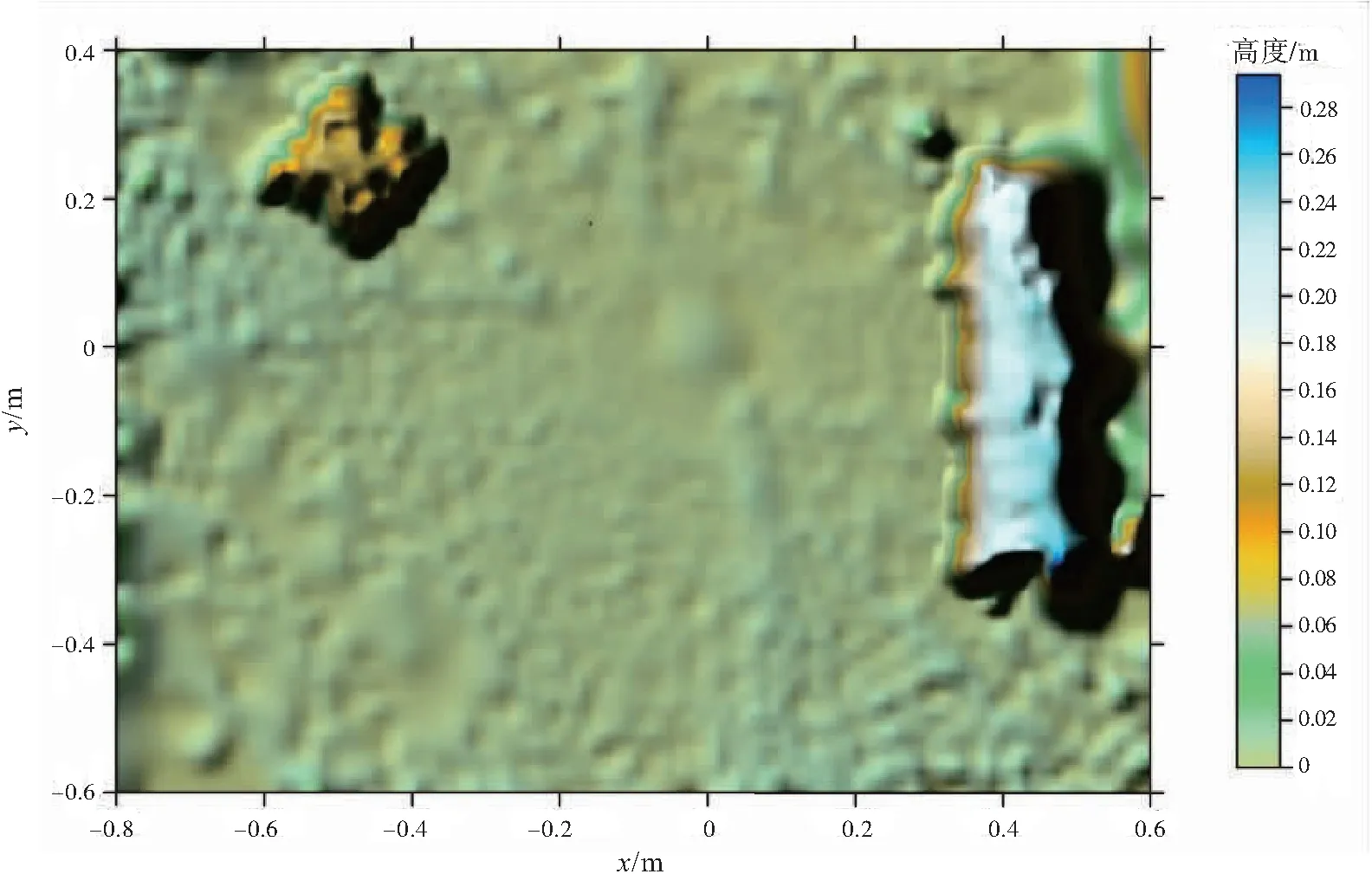
图 7 室内水池实验标志物旋转测量数据平面三维图Fig.7 Plane 3-dimensional image of markers based on rotation measurement data

图 8 室内水池实验标志物旋转测量数据立体三维图Fig.8 Three-dimensional image of markers based on rotation measurement data
通过标志物实验测试可以看出,二维剖面测量时声呐测得的数据点的位置和高程信息较为准确,数据稳定性较好;三维立体测量时声呐的数据(如高程、长度等)较为正确,对于1个平面位置对应1个高程值的标志物(如正方体等),声呐数据能较好地反演出其形态特征,但对于1个平面位置对应多个高程值的标志物(如放倒的圆柱体等),声呐只能反演出其正对面的形态特征。总体而言,剖面声呐数据稳定性和准确性均较好,能够很好地反演出观测目标体的形态特征。
4 舟山海域朱家尖海底地貌现场观测
4.1 研究区概况
研究区为长江口南侧舟山群岛海域朱家尖滑坡区,其位于朱家尖岛西南侧海域,紧靠朱家尖岛围海工程西南侧(图 9),地理坐标: 29°54′1″N,122°20′36″E。根据水深调查数据,朱家尖滑坡所在区域水深在0~120m之间,水深由东北至西南向逐渐变深(张朝阳,2013)。

图 9 长江口南侧舟山群岛海域朱家尖滑坡区地理位置Fig.9 Location of Zhujiajian landslide in Zhoushan islands sea area in the south side of Yangtze River mouth
基于前期物探调查结果,发现朱家尖滑坡区位于朱家尖岛西南侧潮流冲刷槽的东北侧边坡上,深槽深度超过100m(图 10)。该地区地势东北高西南低,地形呈下凹状。滑坡上部位于滩地与斜坡间的坡折带上,地形变化较大,坡度变化在0°~40°之间,滑坡中部坡度在0°~35°之间,滑坡下部坡度稍缓,坡度在10°~22°之间。

图 10 长江口南侧舟山群岛海域朱家尖滑坡多波束数据三维地形图Fig.10 Three-dimensional topographic map of Zhujiajian landslide in Zhoushan islands sea area in the south side of Yangtze River mouth with multi-beam data
4.2 观测设备与过程
2019年11月17日至2019年12月4日在选定的监测点使用搭载有集成研发的观测系统的观测平台(图 11)进行了原位长期观测,获取了监测点的地形地貌数据。本次使用的监测平台主体由内外2个框架组成,内部小框架由不锈钢管焊接而成,在框架两侧设置侧面一半的钢板作为导流板,防止监测平台在水中由于水流的作用发生旋转,在框架上部配备有与配重相连接的脱钩,平台坐底后框架与配重通过脱钩分离,内部小框架可置于外部大框架内部,主要用于搭载监测仪器及配套的采集仓和电池仓(图 11)。外部大框架由不锈钢管和钢板组成,在下部四周和中部密封焊接钢板,保证平台在下放至海底过程中始终密封一部分气体,为平台提供浮力,防止平台整体发生过大的沉降,底部设置圆盘作为止位盘,并在四角的圆盘下方加装钢钎,可以插入泥土中,防止不必要的横纵向位移。2个框架之间设置扳机释放结构,在设备回收过程中通过扳机释放结构实现2个框架之间脱离,对内部小框架和搭载的仪器进行回收,外部大框架弃置海底。

图 11 长江口南侧舟山群岛海域朱家尖滑坡原位观测平台(图片为平台被吊起的状态)Fig.11 In-situ observation platform in Zhujiajian landslide in Zhoushan islands sea area in the south side of Yangtze River mouth(Picture shows state of platform being hoisted)
本次观测工作使用声呐观测系统分别进行了船载测量和坐底原位观测。船载测量时,先调整声呐观测系统程序,接下来将声呐观测系统组装,声呐传感器固定于船舷一侧并入水至水深约3m处,然后连接供电系统对观测点的地貌形态特征进行多次测量,确保能够获取到声呐观测数据。船载测量完毕后,将观测仪器依次安装固定在观测平台上,将声呐观测系统固定于观测平台一侧外部,仅测量靠近海岸一侧的海底地貌形态特征变化;安装完毕后,连接配重与钢缆,平台挂止荡绳,用绞车将设备吊起入水;解除止荡绳,用绞车将平台缓慢下放至海底;潜水员下潜,对平台进行检查,确保平稳布放,连接定位浮球,解除配重与平台间的扳机连接;潜水员回返,通过绞车将配重回收,完成布放。
4.3 观测数据结果与分析
4.3.1 船载测量结果与分析
通过对观测数据进行去噪—制图处理,船载测量结果如 图 12所示。基于测量结果可以得出,测量区域水深最深处与声呐传感器的垂直距离为15.896m,最大水深值约为18.896m,水深最小处与声呐传感器的垂直距离为6.081m,最小水深值约为9.081m。海床上发育有泥纹等微地貌,整体较为平整,地势东北高西南低,倾斜角约为21°27′,与同期进行的浅地层剖面数据结果一致。

图 12 长江口南侧舟山群岛海域朱家尖滑坡观测区海底地貌三维立体图像Fig.12 Three-dimensional image of submarine landform in survey area of Zhujiajian landslide in Zhoushan islands sea area in the south side of Yangtze River mouth
4.3.2 原位观测结果与分析
通过17天的原位观测获取了70余组有效观测数据,选择部分观测数据进行解译处理,对数据进行多次去噪—平滑处理后,结果如 图 13 所示。基于观测结果可以看出,测区地貌形态为平滑海床,海底较为平整,整体呈21°16′倾角,在0°至35°之间,与同期观测的浅剖数据结果一致。

图 13 长江口南侧舟山群岛海域朱家尖滑坡海底原位观测数据三维图像Fig.13 Three-dimensional images of seafloor of Zhujiajian landslide in Zhoushan islands sea area in the south side of Yangtze River mouth based on in-situ observation data
通过将船载测量结果与原位观测结果对比,可以看出2次测量得到的海床形态特征基本一致。但此次观测中船载测量数据精度要高于坐底原位观测精度,这主要是由于使用的观测平台含有较多的钢结构,剖面声呐观测系统固定于观测平台内,工作时发射的声波信号被观测平台结构遮挡,使得声波信号不能到达海底面,声呐接收到了大量无效数据。
5 结论
本研究基于国内外海底地貌特征观测方法和原位观测技术的研究现状,设计了剖面声呐原位观测系统,并提出了观测数据处理方法。通过标志物检验实验对观测系统的性能进行了检验,并将观测系统进行了实际应用。主要结论如下:
1)本研究研制的剖面声呐原位观测系统,主要由负责采集数据的剖面声呐传感器、负责能量供应的供电系统以及负责控制数据采集过程和存储数据的采集系统3个部分组成。通过将声呐观测系统搭载于观测平台上,可以获取海底地貌形态特征参数,能够实现对海底地貌演变规律的原位长期观测研究。同时,基于文献调研和多次对观测数据的处理经验,提出了剖面声呐观测系统的数据处理方法,详细阐述了数据处理流程,需要对数据进行多次去噪处理,然后依据研究需求提取剖面数据或三维地貌数据绘制剖面图像或三维地貌图像。
2)在水槽底部放置了2个已知形态的规则标志物,使用剖面声呐观测系统对标志物进行测量,通过将测量数据与实际形态参数进行对比,验证了剖面声呐观测系统的可行性和准确性。剖面声呐观测系统能较好地反演出特定目标体的形态特征,测得的数据点的位置和高程信息较为准确,数据稳定性较好。
3)基于前期的物探调查结果,选取了舟山海域海底滑坡区作为观测地点进行了原位观测,通过剖面声呐观测系统获得了研究区的地形地貌数据。观测结果进一步表明本研究的剖面声呐观测系统可以用于地形地貌的观测研究。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
实用手外科杂志(2022年2期)2022-08-31
陶瓷学报(2021年5期)2021-11-22
小学生学习指导(低年级)(2021年3期)2021-07-21
小学生学习指导(低年级)(2020年9期)2020-11-09
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
数学小灵通(1-2年级)(2019年10期)2019-11-02
小学生学习指导(低年级)(2018年12期)2018-12-29