
磁链控制型双馈风电机组及其弱电网阻尼优化策略
2022-02-02 08:39冯艳涛
电力系统自动化 2022年24期
谢 震,李 喆,冯艳涛,张 兴
(合肥工业大学电气与自动化工程学院,安徽省合肥市 230009)
0 引言
双 馈 感 应 发 电 机(doubly-fed induction generator,DFIG)因其经济高效的运行能力而在风力发电中广泛应用[1-2]。随着局部区域新能源渗透率不断提升,风电场接入点呈现出弱惯量、低阻尼、高阻抗等弱电网特征,双馈风电机组面临的频率稳定、电压稳定以及谐波谐振等威胁加剧,优化控制结构是保障系统稳定的关键[3-6]。
现有双馈风电机组大多采用基于锁相环同步的矢量控制方法,一般称其控制结构为跟网型或电流控制型。电流控制型双馈风电机组结构简单、功率响应迅速,针对其惯量调频、谐波抑制及故障穿越等研究较为成熟[7-11]。然而在高线路阻抗条件下,并网点电压波动增加,锁相控制与电流控制存在耦合关系,电流控制型双馈风电机组运行受到弱电网限制[12]。
为保障弱电网下新能源的稳定高效开发,要求新能源机组具备维持并网点电压/频率稳定的能力,因此许多学者开始关注构网型控制结构[13-15]。构网型控制结构一般包括同步控制、励磁控制与幅相控制三部分,其中,同步控制基于有功功率平衡调节同步角度输出,并模拟同步机的惯量/调频特性;励磁控制实现机组的稳压/无功支撑能力;而幅相控制负责响应同步控制与励磁控制的下发指令,在结构上属于内环,实现形式较为多样。关于构网型双馈风电机组(以下简称为构网型DFIG),文献[16]针对低短路比电网提出一种构网型DFIG 控制方案,证明其相比矢量控制存在惯量调频优势;文献[17]针对构网型DFIG 的并网功率耦合问题,提出一种自适应定子虚拟阻抗控制策略;文献[18]提出一种针对构网型DFIG 的无锁相环预同步方案;文献[19-20]分别基于对称故障和不平衡电网条件优化构网型DFIG 控制策略。上述构网型DFIG 在实现方式上的差异主要体现为定子电压闭环[17]、定子虚拟阻抗[18]、转子虚拟阻抗[16,19-20]等不同形式的幅相控制环节。实际上,尽管在幅相控制环节上与构网型变流器控制[21]存在差异,构网型DFIG 仍遵循构网型结构的基本特性。而相比跟网型结构,构网型结构被证明在弱电网下具有稳定裕度优势,阻抗分析法[22-24]与特征值分析法[25-26]在其稳定性分析中广泛应用。文献[22]基于谐波线性化方法建立电压控制型/电流控制型虚拟同步机的序阻抗模型,分析得出电压控制型虚拟同步机在弱电网下无锁相环约束,稳定性更好。文献[23]针对应用虚拟同步控制的永磁直驱风电机组建立阻抗模型,提出通过增加网侧变流器电压环的比例系数或减小直流侧电容来重塑网侧变流器阻抗特性,减少机组失稳风险。文献[24]针对基于虚拟同步控制的双馈风电系统建立dq域阻抗模型,得出功率外环导致系统存在低频段振荡风险,并分析虚拟同步控制参数与稳定裕度的关系。文献[25]以虚拟同步机-同步机互联系统为对象建立状态空间模型,研究虚拟同步控制的转子运动方程与虚拟阻抗环节对系统低频振荡的影响。文献[26]基于虚拟同步机小信号模型提出一种综合考虑稳定裕度、二倍频脉动与动态性能的参数设计简化方法。
目前构网型结构在光伏、风电以及储能中均有涉及,其典型方案基于功率控制器特征进行分类,包括下垂控制、虚拟同步控制以及功率同步控制等。现有研究证明构网型控制支撑能力强、弱电网适应性更好,并进一步关注构网型新能源发电装备稳/动态性能的提升。然而,目前关于双馈风电机组的构网型方案研究整体相对较少,幅相控制作为DFIG与构网型控制结合的关键,参与影响系统整体的稳态/暂态特性,其动态在已有研究中尚未得到充分关注。
本文旨在探索构网型DFIG 方案的新实现方式,并关注DFIG 自身特性以及幅相控制环节对系统稳/动态性能的影响。在分析DFIG 定子传输功率与定子磁链矢量关系的基础上,提出一种磁链控制型双馈风电机组(flux-controlled DFIG,FCDFIG)构网方案。通过构建定子磁链-转子电流双闭环结构实现其幅相控制,并基于小信号建模验证系统可控,探究定子磁链幅相控制参与影响机组输出特性的机制。基于特征方程与奈奎斯特曲线分析弱电网下FC-DFIG 的阻尼特性,提出基于定子d轴磁链微分前馈的附加阻尼控制策略,增强其弱电网稳定性。最后,基于实验证明了所提方案及控制方法的可行性与有效性。
1 FC-DFIG 基本结构
1.1 DFIG 功率传输模型
双馈风电机组经线路电感接入远端电网的等效拓扑如附录A 图A1 所示。考虑到网侧变流器稳态时向电网传输转差功率,将DFIG 的定子电流视为并网电流。忽略定子电阻,有

式中:s为拉普拉斯算子;ωs和Lg分别为同步角频率和线路电感;Ψs,dq、Us,dq、Is,dq、Ug,dq分别为dq坐标系下定子磁链、电压、相电流及远端电网电压向量。以Ψs,dq为例,有Ψs,dq=[Ψs,d,Ψs,q]T,其中Ψs,d和Ψs,q分别为Ψs,dq在d、q轴的投影。其他向量的d、q轴投影同理。
结合式(1),DFIG 定子端传输功率满足:

式中:S、Pe、Qe分别为机组定子侧输出的视在功率、有功功率、无功功率;上标“∧”表示共轭运算。
令s=0,由式(2)可得稳态传输视在功率、有功功率、无功功率S0、Pe0、Qe0满足:

式中:Ψs和δ分别为定子磁链向量Ψs,dq的幅值、相角;Ug为远端电网电压的幅值。如附录A 图A2 所示,考虑到Ψs,dq与Us,dq近似正交,有δ≈θ-π/2,其中θ为定子电压向量相角。δ和θ均以远端电网电压向量Ug,dq为相位参考。
在实际运行中一般有θ→0,即δ→-π/2,因而式(3)可简化为:

稳态时DFIG 输出有功功率Pe0主要与定子磁链向量的相位δ有关,系统输出无功功率Qe0主要与磁链向量的幅值Ψs相关,因而可以通过调节定子磁链向量的相位/幅值,实现其并网有功/无功功率控制。
1.2 定子磁链幅相控制
定子磁链的幅相控制是实现系统运行的关键。本文在dq坐标系下构建定子磁链-转子电流双闭环结构,其定向角度由同步控制环节提供。
定子绕组采用发电机惯例,转子绕组采用电动机惯例,则DFIG 的定、转子电压方程及磁链方程可表示为:

式中:Ur,dq、Ir,dq、Ψr,dq分别为dq坐标系下转子电压、电流、磁链向量;Rs和Rr分别为定、转子电阻;ωsl=ωs-ωr为转差角速度,其中,ωr=p0ωm为转子电角速度,p0为电机极对数,ωm为转子机械角速度;Ls、Lr、Lm分别为dq坐标系下的定子自感、转子自感和定转子间的互感。
由式(5)中的定/转子电压方程、磁链方程可得:

式中:σ=(LsLr-L2m)/(LsLr)为漏磁系数。
根据式(6)和式(7),分别构建转子电流内环、定子磁链外环的控制方程如下:



图1 FC-DFIG 控制框图Fig.1 Control block diagram of FC-DFIG

1.3 同步/励磁控制
同步/励磁控制分别提供幅相控制环节的相角、幅值指令。同步控制环节决定系统机电特性,影响同步角度动态。同步控制采用的典型环节包括一阶惯 性[16-20]、P-ω下 垂[21]等。为 避 免 弱 电 网 下FCDFIG 的有功功率/功角振荡现象,选用具有P-ω下垂特性的一阶同步控制结构如下:

式中:Ψs0为定子磁链的前馈值;Qref为无功功率的指令值;n为积分系数。
2 FC-DFIG 建模分析

2.1 考虑定子磁链动态的FC-DFIG 建模
考虑转子电流环的高带宽设计,认为转子电流始终跟随指令值,有

将式(15)代入式(1),得到定子输出电压为:

定义X ij为矩阵X的第i行第j列元素,简化式(17)和式(18)可得FC-DFIG 输出功率为:

基于式(15)至式(19),系统输出有功、无功功率与定子磁链幅值、相角指令之间的数学联系得以建立,在此基础上将通过线性化处理以分析FC-DFIG的稳态、暂态性能。
2.2 FC-DFIG 模型线性化与定子磁链动态



结合式(10)和式(11),FC-DFIG 小信号控制框图如图2 所示。图中:GLPF为功率反馈滤波;ΔP'和ΔQ'分别为无功响应过程中由于功率耦合作用产生的有功变化量和有功响应过程中由于功率耦合作用产生的无功变化量。根据图2(a)可知,A12、A21通道体现了有功无功控制的耦合,因此在建立有功小信号传递函数时,将无功控制作为有功控制的内环[27]。无功传递函数的推导过程类似,其结果如图2(b)所示。

图2 FC-DFIG 简化控制框图Fig.2 Simplified control block diagram of FC-DFIG
基于FC-DFIG 的小信号数学模型,系统的有功、无功传递函数如下:
式中:GP,kh,cp和GQ,kh,cp分别为有功、无功开环传递函数。
结合附录B 表B1 相关参数,绘制FC-DFIG 有功、无功开环传递函数Bode 图如图3 所示。图中,FC-DFIG 有功/无功开环传递函数对应Bode 图在低频段具有正增益,在中低频段相位裕度接近90°,且在高频段具有良好的衰减特性,证明所提FCDFIG 构网方案可以实现并网功率的稳定有效控制。
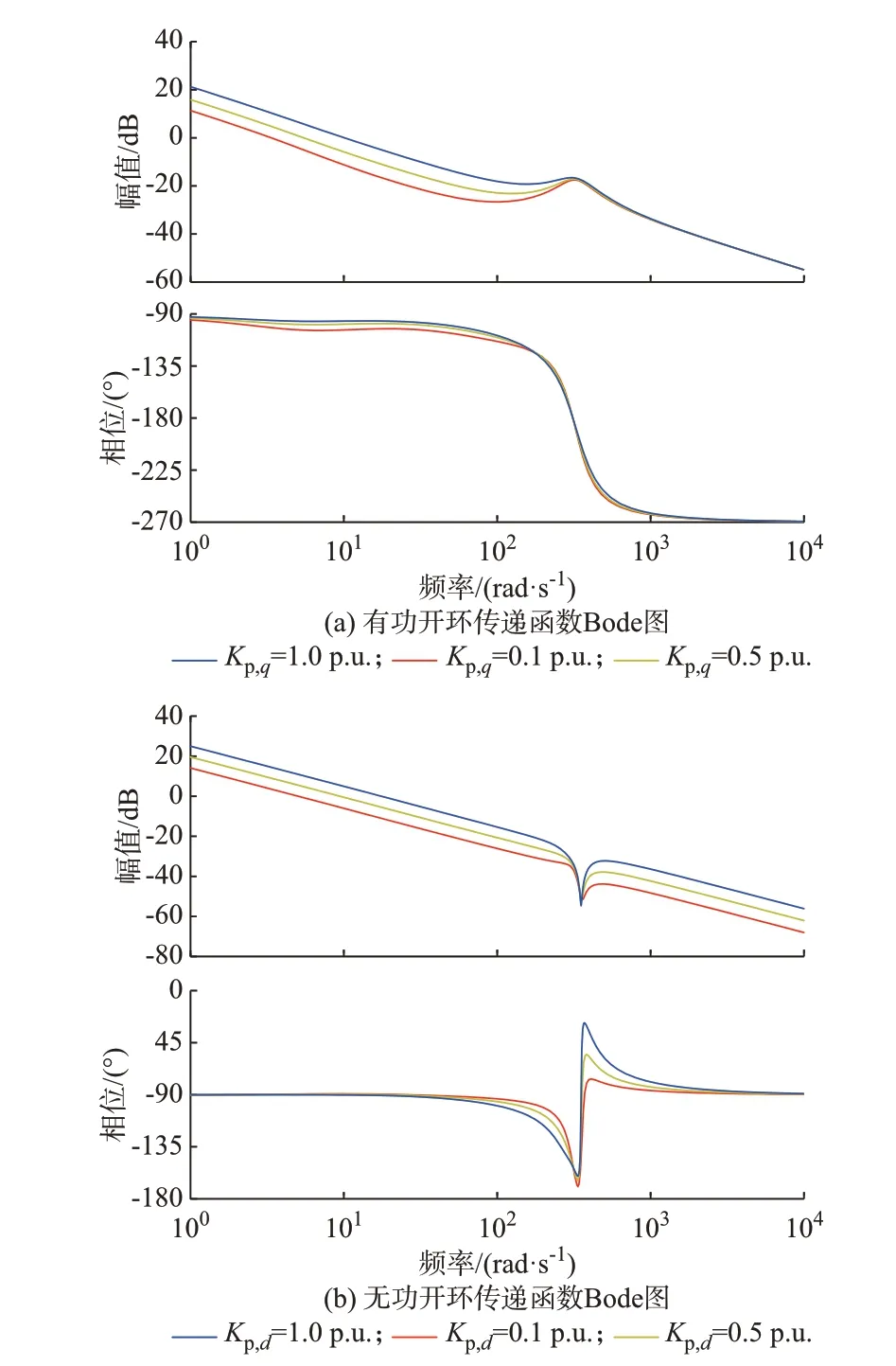
图3 考虑定子磁链动态的FC-DFIG 输出特性Fig.3 Output characteristics of FC-DFIG considering dynamic state of stator flux
此外,为探究定子磁链幅相控制与系统输出特性间的关系,设置定子磁链外环PI 调节器的比例系数Kp,d、Kp,q分别为0.1、0.5、1.0 p.u.。对比图3(a)和(b)可知,系统有功/无功传递函数的低频增益与截止频率分别与Kp,d、Kp,q正相关,即增加其数值能够加快系统有功/无功响应。值得注意的是,Kp,q仅在工频段以下影响系统有功输出,而改变Kp,d会在全频段影响FC-DFIG 的无功幅频特性,这意味着增强Kp,d一定程度上会放大系统无功输出中的高频干扰。为保证定子磁链无静差控制,同时降低其超调动态,这里统一设置定子磁链环PI 调节器的积分系数满足Ki,d=Ki,q=0.01 p.u.。
事实上,以上分析体现了幅相控制环节参与构网型双馈风电机组的重要作用。附录A 图A3 清晰地展示了定子磁链动态参与FC-DFIG 的并网功率调 节 过 程,其 中,t0、t1时 刻 分 别 对 应FC-DFIG 先后2 个不同的稳定状态。如图A3(a)所示,t0时刻给定有功指令增量ΔPref,在t0至t1期间同步控制输出相应增加Δδ*,因而t0时刻定子磁链向量Ψs0在新坐标系dq-frame-1 下的投影ΔΨs,q将负方向偏离零值,经定子磁链环q轴PI 作用,转子有功电流Ir,q增加ΔIr,q。最终,Ψs0过渡到t1时刻的定子磁链向量Ψs1,新坐标系下再次达到Ψs,q==0 的稳态。与有功加载过程类似,t0时刻给定无功指令增量ΔQref,具体过程如图A3(b)所示,在t1时刻满足Ψs,d=,其中为t1时刻定子磁链向量的幅值指令,系统再次进入稳态。值得注意的是,在功率加载过程中,定子磁链环动态在dq轴上存在一定程度的耦合。如图A3(a)所示,假设t0至t1时刻磁链幅值指令不变,角度增量Δδ*除产生q轴上的负投影ΔΨs,q外,Ψs0的d轴投影会相对减小,引起d轴定子磁链环的响应过程。传输线路动态引起的功率耦合同样存在,在图A3(b)中,新坐标系dq-frame-1 相对原坐标系dqframe-0 的顺时针偏移角度为Δδ,这是由于无功加载抬升了公共连接点(PCC)电压,为恢复有功输出至原指令值,δ*相对减小。
4) 当政策模糊性高、冲突程度也高的情况下,选用象征性实行。 顾名思义,指的是政策实行“标记”过程,如再次申述政策的重要性。 它的支配要素是“参与者定约的稳定性”,越稳定,影响力优势越大,政策实行效果越好。
3 FC-DFIG 弱电网阻尼优化策略
随着风电机组装机容量不断提升,高比例风力发电系统接入弱电网易产生小干扰振荡[28-29]。许多文献基于阻抗建模理论[22-24]分析风电机组与弱电网间的交互失稳机理,并从阻抗特性出发优化机组控制参数。事实上,风电机组弱电网交互失稳是电网、机组、控制三方面共同作用的结果,从控制层面出发,减弱电网、机组本身产生的不利影响是提升风力发电整体稳定的有效途径。
3.1 弱电网下FC-DFIG 阻尼特性分析
对于本文所提FC-DFIG 系统,虽然其构网型结构在弱电网下具有稳定裕度优势[13,22,24],但考虑到双馈电机本身具有欠阻尼特性,弱电网下FC-DFIG系统仍存在小干扰振荡风险。
选取定子磁链为状态变量,根据式(1)和式(5)列写dq坐标系下FC-DFIG 的定子磁链状态方程为:

式中:p为微分算子;LΣ=Ls+Lg。
式(24)等号右边的转子电流微分项系数LgLm/LΣ相对较小,可近似忽略,得

由式(26)和式(27)可知,系统具有左边平面的共轭复根,自然振荡频率接近同步频率,且随着线路电感增加,特征根向虚轴靠近,系统阻尼降低。这说明随着电网强度降低,FC-DFIG 发生磁链振荡的风险增加。短路比(short-circuit ratio,SCR)是衡量电网强度的有效指标,其数值kSCR越低表明电网强度越弱,定义如下:

式中:Vgline为远端电网的线电压有效值;SN为机组额定容量。
分 别 设 置SCR 为1.5、3.0、5.0,基 于GP,kh,cp、GQ,kh,cp绘制奈奎斯特曲线如附录A 图A4 所示。根据奈奎斯特稳定判据,曲线是否包围点(-1,j0)决定系统是否稳定,且其与负实轴交点相对点(-1,j0)的距离表示系统的相对稳定裕度。对比图A4(a)和(b),在3 组短路比条件下,GP,kh,cp对应奈奎斯特曲线均不包围点(-1,j0),而随着短路比降低,GQ,kh,cp对应奈奎斯特曲线与负实轴的交点逐渐靠近点(-1,j0),在SCR 为1.5 时,曲 线包围点(-1,j0),这表明弱电网下FC-DFIG 的低阻尼特性会降低其无功稳定裕度,系统在无功加载后可能存在小干扰振荡现象。
3.2 基于定子d 轴磁链微分前馈的附加阻尼控制
为改善弱电网下FC-DFIG 阻尼特性,提升无功稳定裕度,构造基于定子d轴磁链微分前馈的附加阻尼控制方案。
如图4 所示,检测定子磁链d轴分量Ψs,d,将其微分项乘以补偿系数kd引入转子电流指令i*r,d中,所得补偿项与Ψs,d的变化方向相反。采用低通滤波以消除微分噪声,其滤波时间常数τ较小,在分析中可忽略。

图4 附加阻尼控制Fig.4 Additional damping control

根据式(32)可知,补偿后定子磁链状态方程的特征根位于左半平面,且随着补偿系数增加逐渐远离虚轴,即通过选取合适的补偿系数kd,可以一定程度抵消弱电网的不利影响,增强系统稳定。
3.3 附加阻尼参数设计
在SCR 为1.5 的条件下,绘制不同补偿系数下GQ,kh,cp的奈奎斯特曲线如附录A 图A5 所示。由图A5 可以看出,采用定子磁链阻尼策略使得曲线不再包围点(-1,j0),且随着补偿系数kd增加,曲线与负实轴的交点逐渐远离点(-1,j0),表明系统稳定裕度得到提升。
根据以上分析,所提附加阻尼策略可以优化系统阻尼,且其稳定裕度与补偿系数kd正相关。考虑到kd较大时不利于快速无功响应,依据式(33)选取kd满足系统阻尼比ξ=0.707,以附录B 表B1 参数为例,对应kd=0.263。此外,由于定转子电流采样及微分计算均存在噪声干扰,滤波时间常数τ需根据实际工况选取,本文设置τ=1.59×10-3s。

4 实验研究
为验证本文所提FC-DFIG 构网方案的有效性,搭建双馈风力发电实验平台如附录B 图B1 所示。实验相关参数如附录B 表B1 所示。
4.1 FC-DFIG 运行控制
如图5(a)所示,定子磁链指令Ψ*s,d在t=0.5 s时从0 阶跃到1 p.u.,Ψ*s,q保持为0。定子dq轴磁链对指令跟踪良好、响应较快。在Ψs,d响应的初始阶段,Ψs,q受耦合影响偏离零值,但在闭环控制作用下最终稳定,说明本文构建的定子磁链、转子电流双闭环结构可以有效实现定子磁幅相控制。图5(b)为FC-DFIG 接入4 mH 线路电感电网的功率阶跃响应波形。在t= 0.2 s 时,有功指令Pref从0 阶跃到0.8 p.u.,在t= 1 s 时,无 功 指 令Qref从0 阶 跃 到0.4 p.u.。稳态时机组输出有功、无功功率均准确跟踪功率指令,定、转子电流Isa、Ira响应平稳,证明FCDFIG 构网方案切实可行。
FC-DFIG 属于构网型结构,具备支撑电网电压/频率的能力,附录B 图B2(a)和(b)分别为电网发生频率跌落、电压跌落时FC-DFIG 功率响应波形。如图B2(a)所示,设置0.05、0.20 Hz 两种频率跌落深度,FC-DFIG 能够响应电网频率变化进行有功支撑。如图B2(b)所示,设置电网电压跌落0.2 p.u.,持续500 ms,FC-DFIG 增发无功功率0.3 p.u.。
附录B 图B3(a)和(b)为不同定子磁链环参数下FC-DFIG 的有功、无功输出特性,对应工况与图5(b)相 同,磁 链 环 积 分 系 数Ki,d、Ki,q固 定 为0.01 p.u.。可 知 随 着Kp,d、Kp,q增 加,FC-DFIG 的 有功、无功响应速度分别得到提升,且整体上无功响应速度更快。值得注意的是,以往研究往往忽略幅相控制动态,以同步/励磁控制本身的特性描述系统输出特性,因而理论上基于下垂控制的构网型方案由于其一阶系统特征而不存在输出超调现象。事实上由于双馈电机、传输线路的固有特性,转子变流器输入到定子输出存在不可忽略的动态过程。如图B3(a)和(b)所示,FC-DFIG 有功响应随Kp,q增加出现超调现象,而随着Kp,d增加,无功响应的超调动态得到抑制,这说明幅相控制环节作为构网型双馈风电机组的关键部分,其动态特征对系统整体的输出特性存在不容忽视的影响,在研究中需要得到充分的关注。

图5 FC-DFIG 运行工况Fig.5 Operation condition of FC-DFIG
4.2 FC-DFIG 附加阻尼控制
根据附录A 图A4 相关分析,GQ,kh,cp对应奈奎斯特曲线在SCR 大于等于3 时不包围点(-1,j0),上述实验中Lg=4 mH(SCR 为6.05),因此FC-DFIG 在无功加载时未发生小干扰振荡现象。为验证所提附加阻尼控制对弱电网下FC-DFIG 稳定性提升的有效性,设置线路电感Lg=24 mH(SCR 为1.01)。根据前文分析,GQ,kh,cp对应奈奎斯特曲线在SCR 小于等于1.5 时包围点(-1,j0),此时投入附加阻尼控制可以抑制系统小干扰振荡。
如图6 所示,0.4 s 前FC-DFIG 保持空载并网运行,在t=0.4 s 时加载有功功率,限制稳态有功功率为0.6 p.u.。在t=0.8 s 时加载无功功率,同时附加阻尼标志位Fd置1,0.8~1.1 s 内FC-DFIG 输出稳定。1.1~1.5 s 内Fd置零,附加阻尼控制切除后定子磁链Ψs,d、Ψs,q,定转子dq轴电流发生小干扰振荡。在t=1.5 s 时Fd再次置1,FC-DFIG 小干扰振荡得到有效抑制,证明所提附加阻尼策略可以优化FCDFIG 阻尼特性,保障机组弱电网运行稳定。实验中附加阻尼参数设置为kd=0.236、τ=1.59×10-3s。

图6 附加阻尼验证Fig.6 Verification of additional damping
5 结语
本文基于定子磁链、转子电流双闭环结构实现定子磁链幅相控制,提出一种FC-DFIG 构网方案。基于小信号建模探究考虑定子磁链动态的系统输出特性,并结合特征方程和奈奎斯特稳定判据,分析解决弱电网下FC-DFIG 由于低阻尼特性产生的小干扰振荡问题。经理论与实验验证,本文构建的定子磁链、转子电流双闭环结构可以有效控制定子磁链矢量,FC-DFIG 构网方案具备实际应用的可行性。所提附加阻尼控制能够效优化系统阻尼,提升机组弱电网稳定运行能力。本文仅研究该方案在弱电网下的稳态运行特性,针对FC-DFIG 在非理想电网条件下的工作表现与提升将是下一步研究的目标与方向。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
大电机技术(2022年3期)2022-08-06
湖南电力(2022年3期)2022-07-07
电机与控制应用(2022年4期)2022-06-27
大电机技术(2022年1期)2022-03-16
防爆电机(2021年6期)2022-01-17
制造技术与机床(2017年2期)2017-05-04
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
