基于闭环模糊控制的扰动观察法MPPT研究
2022-02-09 02:04方胜利侯贸军马春艳朱晓亮
计算机仿真 2022年12期
方胜利,侯贸军,马春艳,朱晓亮
(1. 湖北汽车工业学院电气与信息工程学院,湖北 十堰 442002;2. 十堰巨能电力设计有限公司,湖北 十堰 442000)
1 引言
随着社会能源问题的不断凸显,太阳能作为一种清洁、可再生能源在能源替代和能源升级中扮演着越来越重要的角色。而光伏发电作为太阳能被可靠、广泛利用的关键技术,是近年来能源领域的研究热点。但由于光伏电池的输出功率受光照强度、环境温度等因素影响,且具有典型的非线性特征,因此需采用最大功率点跟踪算法对其具体实现电路进行控制,以提高太阳能的利用率[1]。而在众多的MPPT算法中[2,3,4],由于扰动观察法具有控制回路简单、测量参数少、对传感器精度要求不高、易于实现等优点而被广泛应用[5]。但该方法也同时存在易于震荡、部分功率损失、可能误判等缺点,故需要对该方法进行改进优化。其中文献[6]提出了先恒压定位再变步长扰动观察的方法;文献[7]提出了根据环境因素实施修正参数变量以寻求最优补偿的方法;文献[8]则提出了一种根据功率变化大小自适应变步长的方法。这些算法均基于具体的数学模型对扰动观察法进行改进,而由于光伏电池输出具有时变性和非线性,因此无法同时顾及响应速度和跟踪精度;文献[9]、[10]虽然采用了模糊控制算法对步长进行优化,但由于选择的输入模糊变量及模糊变量值不合适,且在具体阻抗匹配实现电路上均采用开环控制,导致输出电压和功率波动较大,文献系统响应速度和跟踪精度都不高;文献[11]基于神经网络控制实现最大功率点预测和控制,其跟踪精度受神经元个数和训练数据准确度的影响较大;文献[12]、[13]则分别采用布谷鸟搜索算法和等面积法实现光伏阵列的最大功率跟踪,但均在系统搜索收敛的情况下可行,约束条件较多。
基于此,本文选择光伏电池输出的和作为输入模糊量,采用模糊控制理论对扰动观察法进行改进,根据光伏电池的输出状态实时调整扰动幅度,提高响应速度、减少震荡功率损失。此外,为进一步提高系统稳定性和实时性,通过基于PI闭环控制的Boost电路实现系统阻抗匹配。最终通过Matlab的仿真分析进行验证。
2 光伏电池输出特性
根据光伏电池的基本工作原理和物理学电子特性,其等效电路模型如图1[14,15]。
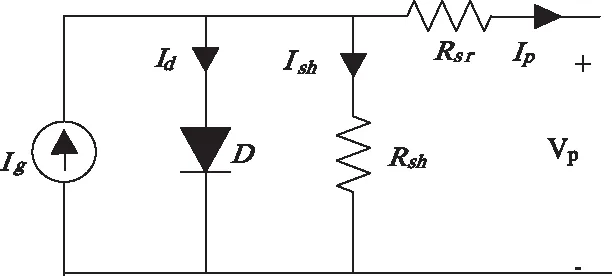
图1 光伏电池等效电路模型
其特性方程为
(1)
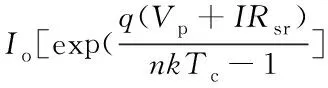
式(1)中,ISCR为光伏电池在参考光强GR和参考温度TcR时的短路电流,αT为光电流的温度系数(硅光电池为0.0017A/K),G和Tc分别是光伏电池的实际光强和以实际温度;式(3)中Rsr和Rsh分别是光伏电池等效串联电阻和并联电阻;式(4)中n为发射系数(对硅材料典型值为1.3),k为玻尔兹曼常数,q为电子电荷常数,Io为等效二极管D饱和电流,可表示为

(2)
式(2)中,IoR为参考温度下的饱和电流,eg为光电材料的带隙能量常数。
光伏电池输出功率为
Pp=VpIp
(3)
式(3)中,Pp为光伏电池输出功率,Vp、Ip分别为光伏电池输出电压、电流。
由以上数学表达式可知,光伏电池输出特性方程为超越方程,其输出随着外界光照强度和温度的变化而变化,且具有典型的非线性特征。
在实际工程应用中,通常对以上标准模型进行简化得到工程用光伏电池数学模型

(4)
式(4)中,Iscp、Vocp、Imp、Vmp分别为光伏电池在一定光照强度和温度条件下的短路电流、开路电压、最大功率点电压、最大功率点电流,可分别由参考光强和参考温度条件下的参考值Iscpref、Vocpref、Impref、Vmpref修正获得
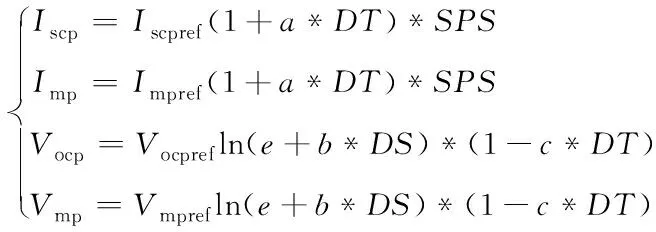
(5)
式(5)中,a、b、c均为补偿常数,a=0.0025/℃,b=0.0005/(W/m2),c=0.00288/℃,且
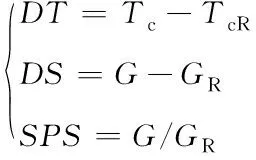
(6)
式(6)中,Tc、TcR、G、GR分别为光伏电池的实际温度、参考温度、实际光照强度、参考光照强度。
本文选择某光伏电池阵列参数为:参考光强GR=1000W/m2,参考温度TcR=25℃,Vocpref=45V,Iscpref=5.1A,Vmpref=35,Impref=4.5A。在Matlab中建立光伏阵列仿真模型如图2。
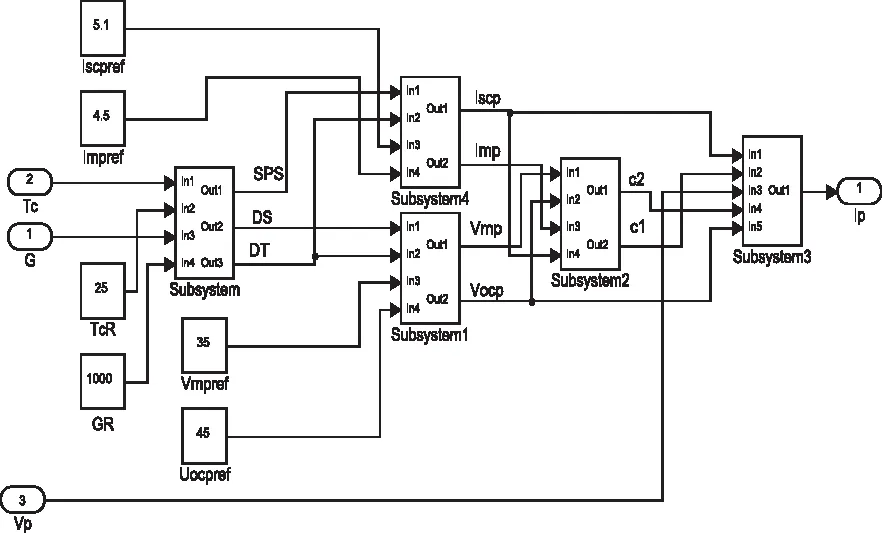
图2 光伏阵列仿真模型
对图2所示的光伏整列模型进行封装,并通过调节其光照强度和温度,得到当其输出电压改变时的输出特性,该部分仿真模型如图3,仿真分析如下:
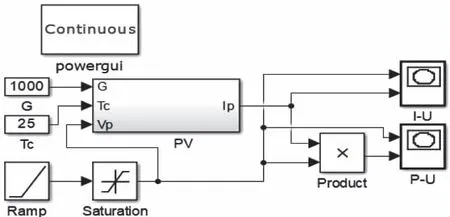
图3 光伏整列输出特性仿真模型
1)当温度恒定(25℃)时,不同光照强度下的输出特性曲线如图4。由图4可知,输出电流会随输出电压的增大而逐渐减小,而在某一特定电压下输出功率达到最大,且其最大输出功率随着光照强度的增大而显著增大。
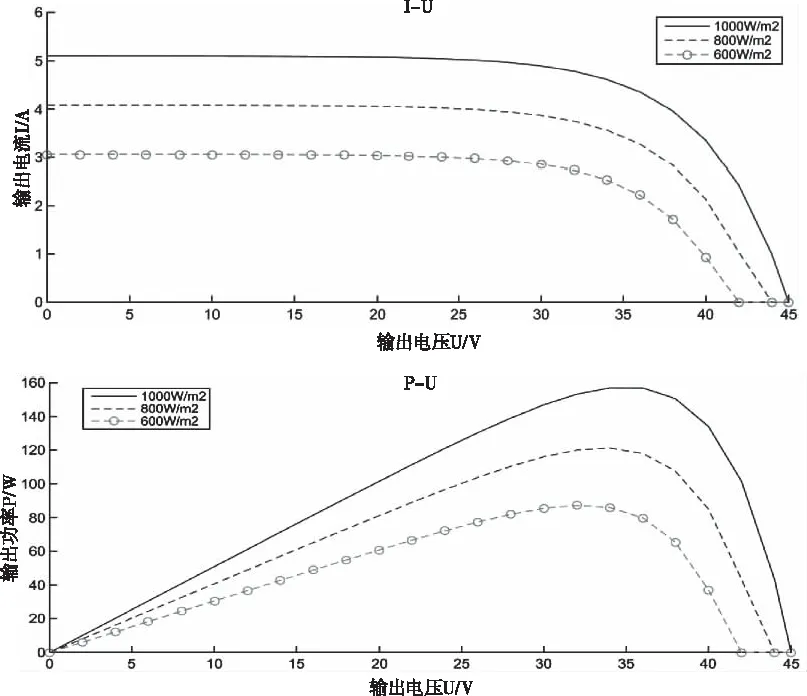
图4 相同温度不同光强下的输出特性曲线
2)当光照强度恒定(1000W/m2)时,不同温度下的输出特性曲线如图5。由图5可知,输出电流会随输出电压的增大而逐渐减小,而在某一特定电压下输出功率达到最大,且其最大输出功率随着光伏电池温度的增大而略微减小。
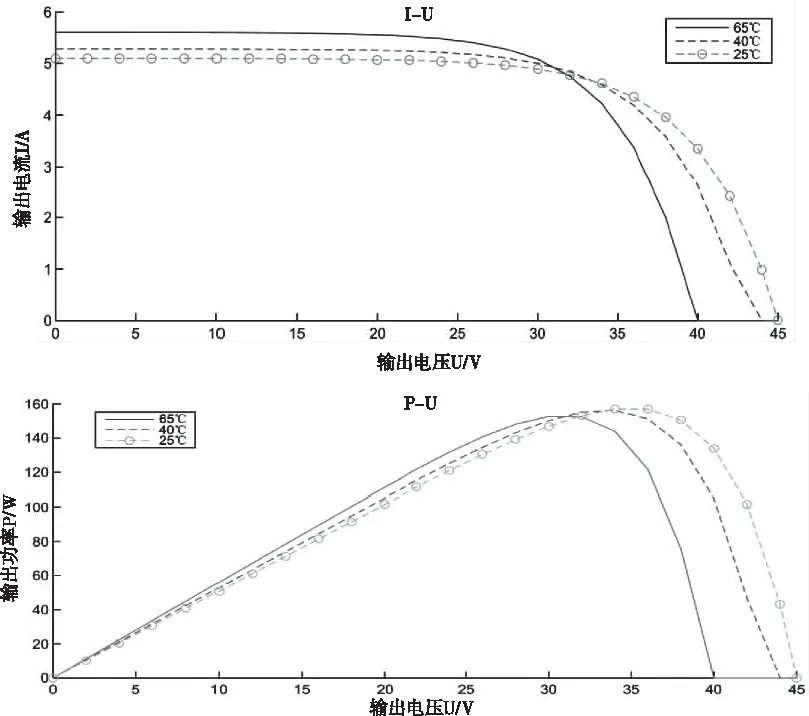
图5 相同光强不同温度下的输出特性曲线
综合图4、图5可知,在一定的外界光强和温度下,光伏阵列的输出功率与输出电压成“反V字形”变化趋势,故存在唯一的最大功率点。这为最大功率跟踪控制提供了理论基础。
3 扰动观察法原理
扰动观察法,作为一种在线式MPPT控制算法,其核心是根据其功率—电压输出特性(如图6)“主动扰动、自动寻优”[16,17],其基本工作原理是:周期性的改变负载(也即输出电压),并比较负载改变前后的输出功率大小,从而决定下一步负载的改变方向。若负载改变后输出功率增大,则下一周期继续同方向改变负载(如图中P1点“左侧爬坡”);反之则反方向改变负载(如图中P2点“右侧爬坡”)。如此反复扰动、比较,最终达到最大功率点Pm。
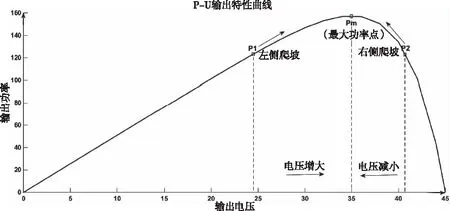
图6 光伏电池P-U特性曲线
根据扰动观察法工作原理,其控制流程如图7所示。
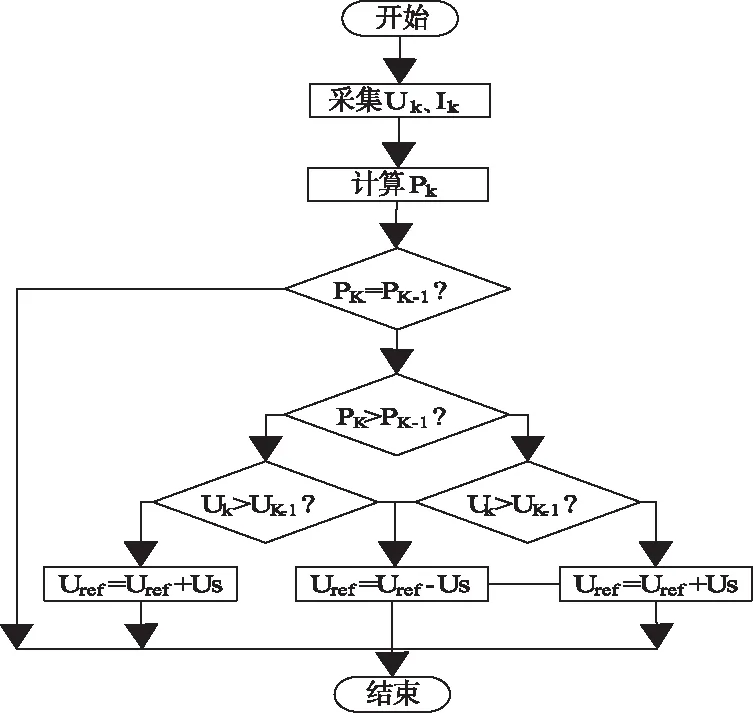
图7 扰动观察法控制流程图
由分析可知,扰动观察法是通过光伏电池各工作点的输出功率变化趋势进行最大功率点跟踪,故对测量传感器的精度要求不高,同时还具有算法简单、需要测量的参数少(仅需输出电压和输出电流)等优点,故易于实现。但当其达到最大功率点时,不会停止扰动,从而在最大功率点附近不停震荡,造成功率损失,导致其发电效率降低,在环境变化缓慢时尤为突出。当然可通过设置较小的扰动步长来减小震荡能量损失,但在环境变化较快时,较小的扰动步长会导致跟踪时间过长,造成大量的跟踪能量损失[18]。因此设置合适的扰动步长提高光伏发电效率的关键。
4 扰动步长的模糊控制
扰动步长的模糊控制即是选择合适的输入感应量,并将扰动前后该感应量变化的大小、正负用模糊语言进行描述,并结合光伏电池的输出特性制定模糊控制规则,经模糊运算和模糊推理后自动调整扰动步长Us,以提高最大功率点跟踪的速度和精度。
根据上文中对光伏电池P-U输出特性曲线分析可知,在最大功率点处曲线斜率为零,即dP/dU=0,离最大功率点越近则曲线斜率dP/dU的绝对值越小,离最大功率点越远则曲线斜率dP/dU的绝对值越大,据此可判断当前工作点离最大功率点的靠近程度。同时根据dP/dU的正负可判断当前工作点是在最大功率点的左侧还是右侧。此外结合电压变化量dU的正负可判断当前工作点的运动轨迹。根据这些判断结果结合实际模糊控制规则来确定适当的扰动步长Us。基于此,本文选择dP/dU和dU作为其模糊控制器的输入感应量,并选择扰动步长Us作为模糊控制器的输出控制量。其模糊控制结构如图8。
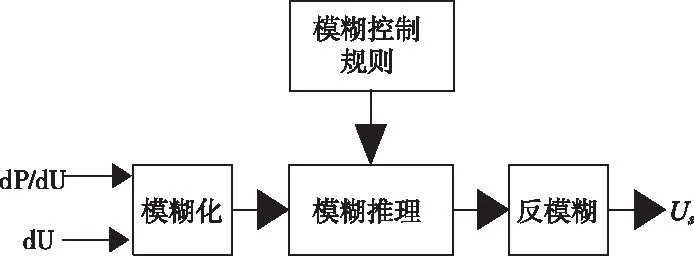
图8 扰动步长的模糊控制结构图
为进行模糊运算,首先需要对输入感应量和输出控制量进行模糊化。本文选择模糊量dP/dU和Us有相同的模糊变量值(负大、负中、负小、零,正小、正中、正大),对应的模糊子集记为
dP/dU,Us={NB,NM,NS,ZO,PB,PM,PS}
其中dP/dU的模糊论域定义为[-5.1,5.1],模糊子集NB、PB采用梯形型隶属度函数表示,其它模糊子集采用均匀三角型隶属度函数表示。其隶属度函数曲线如图9。
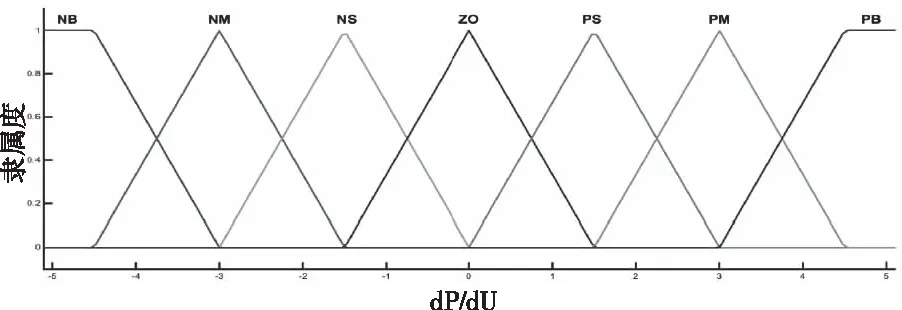
图9 dP/dU隶属度函数曲线
Us的模糊论域为[-6,6],所有模糊子集采用均匀三角型隶属度函数表示,隶属度函数曲线如图10。
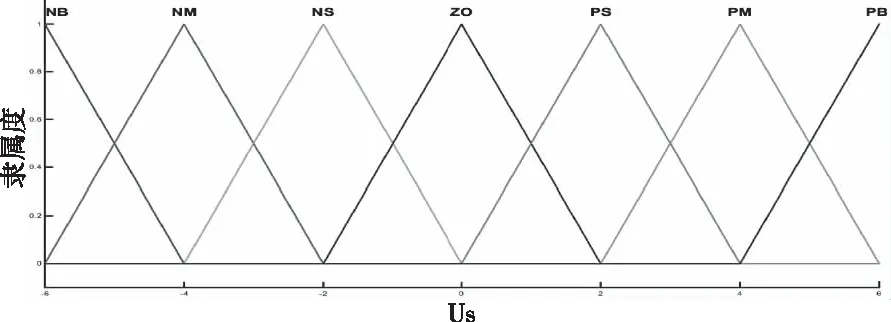
图10 Us隶属度函数曲线
对于变量dU,为减少模糊规则数、降低模糊控制调节频率,选择dU的模糊变量值为负、零、正,其对应的模糊子集dU={N,ZO,P}。其中模糊子集N、P采用梯形型隶属度函数,模糊子集ZO采用均匀三角型隶属度函数,模糊论域定义为[-1,1]。其隶属度函数曲线如图11。
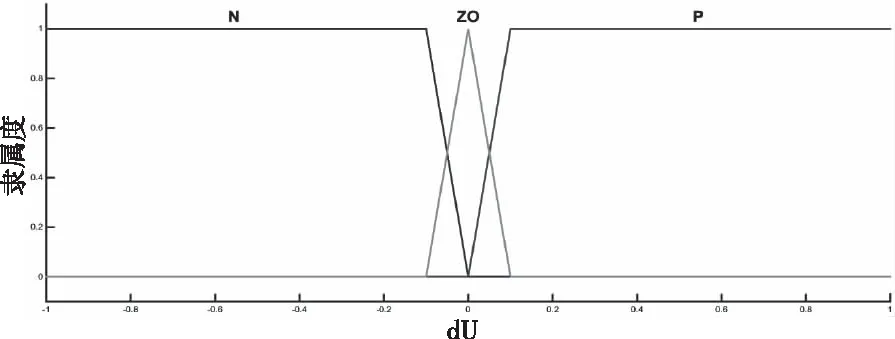
图11 dU隶属度函数曲线
对输入感应量模糊化后需结合光伏电池输出特性制定模糊控制规则,以便于根据各个工作点处输入感应量dP/dU、dU的模糊值给出输出控制量Us的模糊值。为保证光伏输出具有足够的跟踪速度和精度,Us的模糊控制规则见表1。
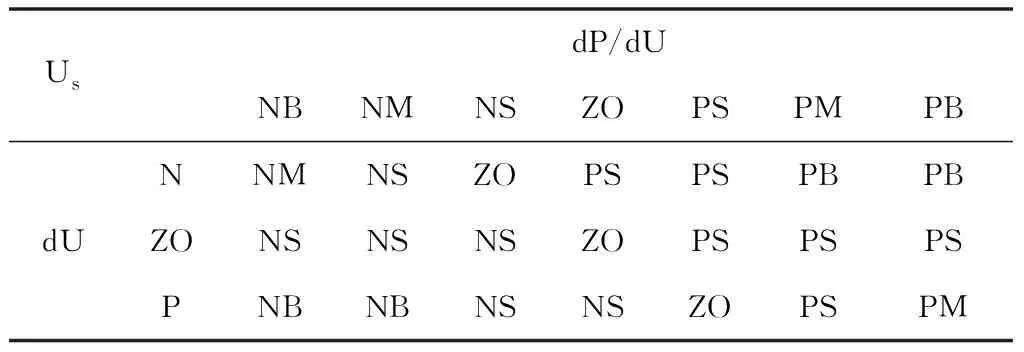
表1 模糊控制规则表
即表示:rule 1:If dP/dU is NB and dU is N,Then Usis NM;
rule 2:If dP/dU is NB and dU is ZO,Then Usis NS;
…
rule 21:If dP/dU is PB and dU is P,Then Usis PM。
本文采用Mamdani法模糊推理,将模糊控制规则表中的第i条规则(rule i,1≤i≤21取整)用等效条件语句代替,即:
rule i:If dP/dU is Aiand dU is Bi,Then Usis Ci
其中Ai、Bi、Ci为分别模糊变量dP/dU、dU、Us的各个模糊变量值。
由此生成第i条模糊蕴涵关系Ri,定义为
Ri(dP/dU,dU,Us)=μAi×Bi×Ci(dP/dU,dU,Us)
=μAi(dP/dU)∧μBi(dU)∧μCi(Us)
(7)
式中:μAi(dP/dU)、μBi(dU)、μCi(Us)分别为模糊子集的隶属度,符号“∧”表示取小运算。
则由整个模糊控制规则表确定的模糊蕴涵关系为

(8)

根据模糊控制器当前实际输入:dP/dUisA’,dUisB’,可在dP/dU、dU的论域上确定一个模糊集合U,其模糊隶属度函数可表示为
μU(dP/dU,dU)=μA′(dP/dU)∧μB′(dU)
(9)
则当前输出Us的模糊集合为
C′=U∘R
(10)
式中:符号“∘”表示其隶属度采用上确界算子进行计算。
经过模糊推理得到的仅是输出控制量Us的模糊值,采用通用的重心法(COA)进行反模糊以得到Us的单一精确值输出。其算法表达式为
(11)
5 Boost电路闭环PI控制
为具体实现最大功率跟踪,通常需要引入Boost电路,不仅可实现负载匹配,使光伏电池功率输出最大,另一方面将光伏电池与后续逆变环节独立分开,可使发电系统更加可靠。为进一步减小系统波动、消除稳态误差,提高整体的稳态性能,本文对Boost电路实施闭环PI控制。
系统模糊控制输出的扰动步长Us(k)也即光伏电池参考输出电压Uref与当前输出电压U(k)之间的误差量,通过PI计算对Boost电路中电子开关的调制信号Ur进行控制,然后通过该调制信号Ur和载波型号的比较实现对电子开关的PWM控制,最终使实际光伏输出电压能高效跟随参考电压的变化而变化,其控制结构如图12。
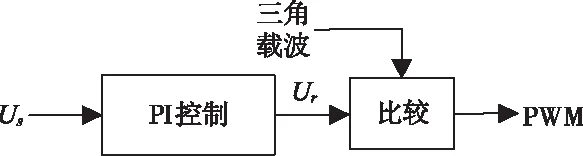
图12 Boost电路PI闭环控制结构图
6 Matlab控制系统建模
根据功能分析,光伏发电控制系统结构框图如图13。
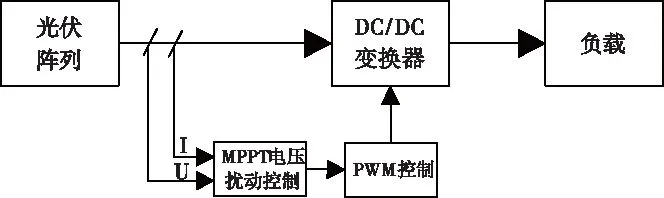
图13 光伏发电控制系统结构框图
在图13中,DC/DC变换器主电路设计参数C1=100μF、C2=300μF、L=10mH,系统负载R=20Ω。对电子开关IGBT驱动脉冲的控制包括两部分,即基于扰动观察法MPPT控制模块和Boost电路PWM控制模块,在Matlab中建立总体仿真模型如图14。
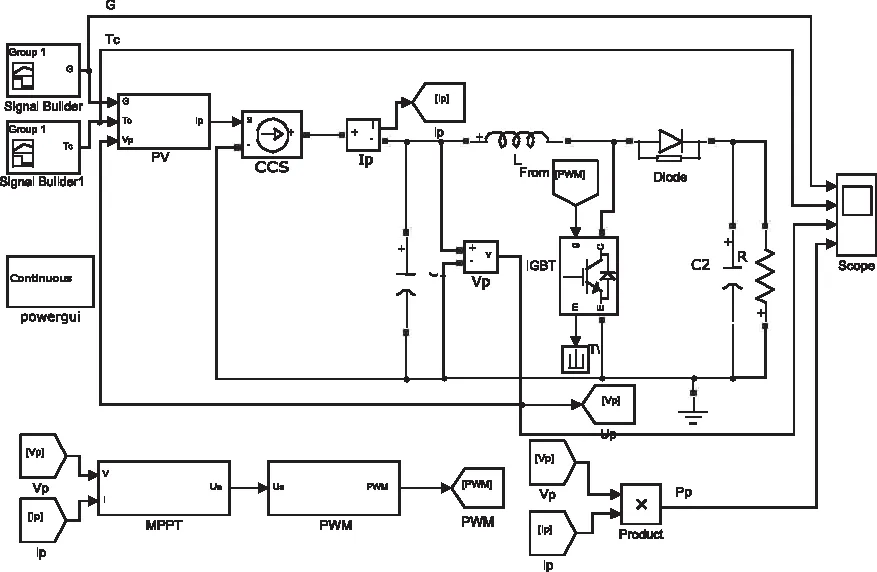
图14 系统总体仿真模型图
对图14中的MPPT和PWM模块分别采用以下三种方法进行建模分析:
1)建立传统定步长扰动观察法MPPT和Boost电路PWM开环控制模型,MPPT模块和PWM模块仿真模型如图15。此时MPPT模块输出的Us(扰动步长为定值±0.001)即为Boost电路中电子开关驱动脉冲PWM的调制信号,PWM载波幅值设置为±1。
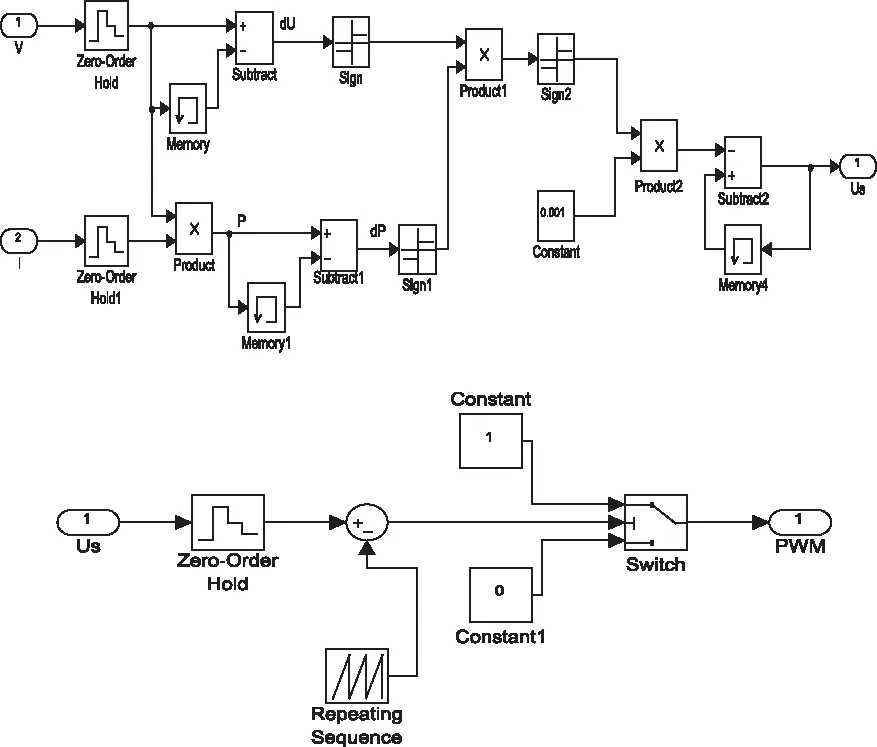
图15 定步长扰动观察法开环控制PWM模型
2)建立基于模糊控制的扰动观察法MPPT和Boost电路PWM开环控制模型,MPPT模块和PWM模块仿真模型如图16。此时MPPT模块输出的Us(变步长)即为Boost电路中电子开关驱动脉冲PWM的调制信号,PWM载波幅值设置为±10。
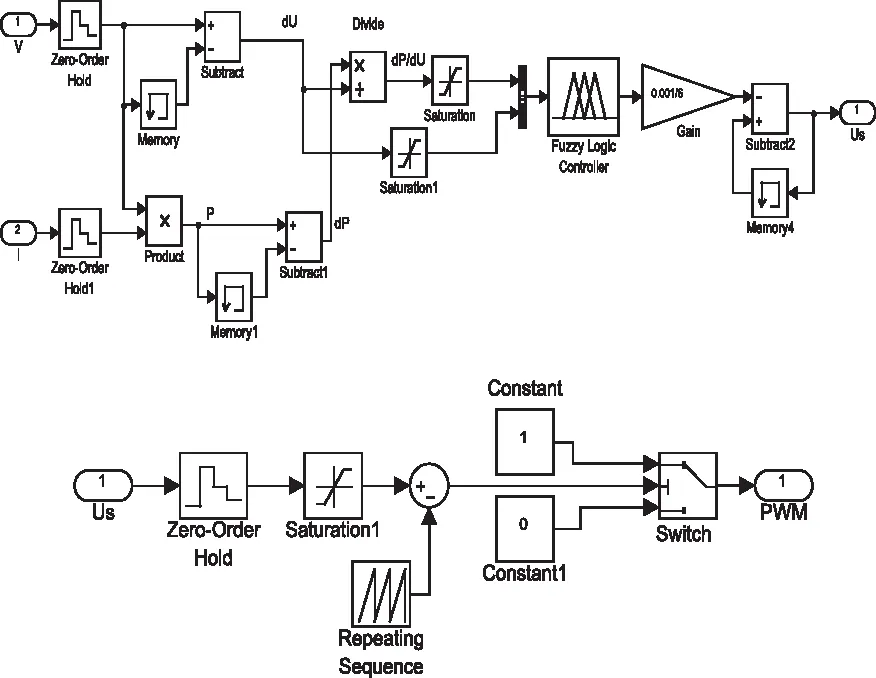
图16 改进型扰动观察法开环控制PWM模型
3)建立建立基于模糊控制的扰动观察法MPPT和Boost电路PWM闭环PI控制模型,MPPT模块和PWM模块仿真模型如图17所示。此时MPPT模块输出Us为扰动电压,其经PID控制输出Boost电路中电子开关驱动脉冲PWM的调制信号,PWM载波幅值设置为±10。
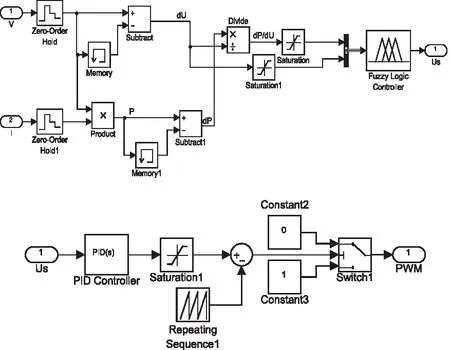
图17 改进型扰动观察法闭环控制PWM模型
7 仿真及分析
在Matlab环境中采用ode45变步长仿真算法对以上模型进行仿真,为检验当光照强度G和温度Tc变化时光伏阵列的功率跟踪效果,本系统按照表2在特定时刻改变光伏阵列光照强度G或温度Tc条件,并经式(3)~(6)计算出其在设定条件下理论最大功率点电压Vp及最大功率Pp。
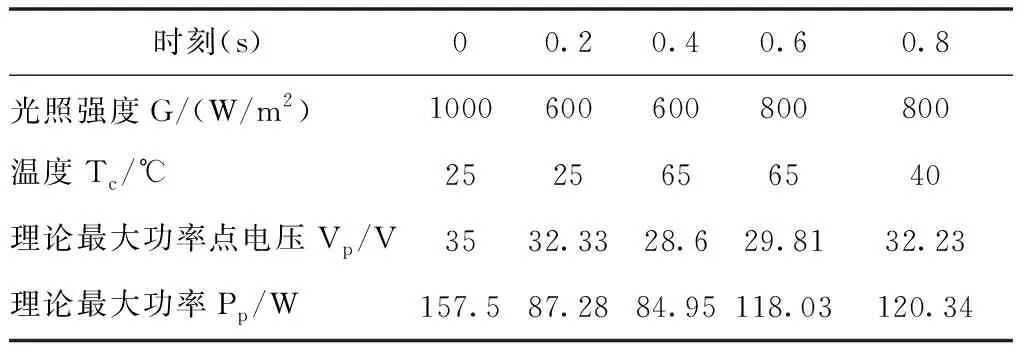
表2 环境条件变化
图18、图19分别为采用传统定步长扰动观察法MPPT和Boost开环控制(控制方法1)、基于模糊控制的改进型扰动观察法MPPT和Boost开环控制(控制方法2)、基于模糊控制的改进型扰动观察法MPPT和Boost闭环PI控制(控制方法3)等三种控制方法在设定条件下的光伏阵列输出电压(Vp1、Vp2、Vp3)和输出功率(Pp1、Pp2、Pp3)的变化曲线。
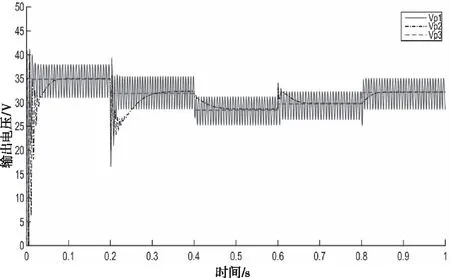
图18 光伏阵列输出电压变化曲线
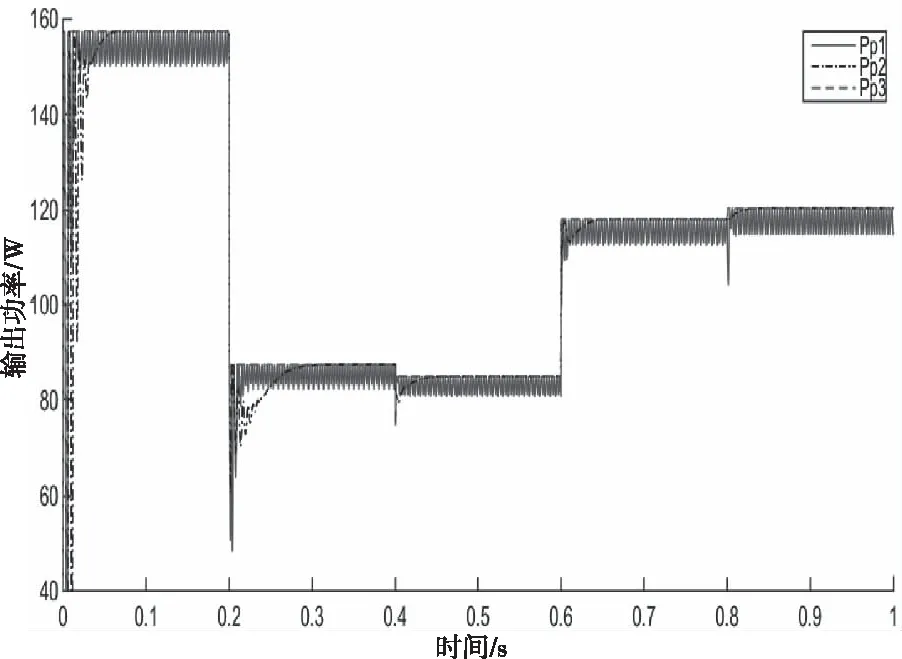
图19 光伏阵列输出功率变化曲线
对图18、19进行分析,其仿真结果见表3。

表3 仿真结果
对表3中的数据进行分析比较可知,采用本文设计的基于模糊控制的改进型扰动观察法不仅可使光伏阵列输出达到且近似稳定在最大功率处,获得较高的最大功率跟踪精度,而且采用PI闭环控制的Boost电路可使系统能高效跟踪外界光照强度和环境变化时的最大功率点,获得较快的最大功率跟踪速度,两方面结合,从而极大的提高光伏电池的发电效率。
8 结束语
本文在对光伏电池输出特性进行分析的基础上,将模糊控制算法引入扰动观察法最大功率跟踪中,并对其Boost实现电路进行PI闭环控制。通过Matlab仿真分析和对比,验证了该控制算法能兼顾光伏电池最大功率跟踪的实时性和稳定性,在提高其跟踪精度的同时可提高其跟踪速度,为改善光伏发电性能、提高光伏发电效率提供了一种重要的控制方法。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
河北理科教学研究(2020年2期)2020-09-11
作文成功之路·小学版(2020年1期)2020-03-03
数字技术与应用(2017年6期)2017-09-08
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
中学生数理化·高三版(2016年4期)2016-05-14
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
中国光学(2015年5期)2015-12-09