低轨卫星网络中基于用户位置的位置管理策略
2022-02-09 02:04孙移星陈前斌
计算机仿真 2022年12期
孙移星,杨 波,唐 伦,陈前斌
(1. 重庆邮电大学通信与信息工程学院,重庆 400065;2. 东方红卫星移动通信有限公司,重庆 401147)
1 引言
低轨(Low Earth Orbit,LEO)卫星通信系统是未来空天地一体化网络的重要组成部分,是当前及未来移动通信领域研究的热点与难点。移动性管理是移动通信领域的一个具有挑战性的问题,它主要包括:切换管理和位置管理。位置管理涉及是否可以成功寻呼,在移动性管理中具有举足轻重的作用。
位置管理包括两个方面,位置更新(Location Update)和位置寻呼(Paging)。位置更新是指用户向系统上报自己的位置信息,系统进行登记存储;位置寻呼指的是系统将主叫用户的寻呼消息成功地传递给被呼用户,实现两者之间通信的建立。如何实现较高寻呼成功率,减少寻呼时延,平衡位置更新与位置寻呼的总开销是位置管理研究的主要问题。
根据低轨卫星是否具有星上处理能力将低轨卫星通信分为两类:透明传输的低轨卫星通信系统和具有星上处理能力的低轨卫星通信系统。文献[5]研究了透明传输的低轨卫星通信系统中的位置注册与寻呼问题,讨论了四种位置区设计的优点与缺点,使用访问位置寄存器(Visitor Location Register,VLR)和归属位置寄存器(Home Location Register,HLR)的二级位置信息数据库,网络HLR与VLR相连,寻呼的时候根据存储的信息查找用户,从寻呼带宽和位置更新开销两方面分析基于卫星和信关站的位置区划分方案的性能;文献[6]提出了在上述网络架构下,一步指针转发策略(OPF),即不在HLR中更新自己的位置信息,而是在原VLR中建立一个指针,指向新的VLR,这种策略大大减少了信令的开销。为避免较长的VLR链表导致较长的呼叫建立时延,OPF链表中只有两个VLR;文献[7]在文献[6]的基础之上,提出了基于动态K步的用户位置更新策略,针对不同的业务需求,动态设置VLR中链表的长度,是一种动态的管理方案。上述几个研究,都停留在过去透明传输的低轨卫星通信系统下,并且严重依赖地球地面站的支持。在今后具有星上处理能力的低轨卫星通信系统中,上述方案显得臃肿复杂且难以实际部署实现。本研究将在具有星上处理能力,且仅有一个地面站的系统中,提出一个可用的位置管理方法,主要工作如下:
1)提出了一种基于终端自身地理位置信息的动态位置区划分,在该位置区划分方法下,终端超出了自己的位置更新半径R,或者终端超过一定的时间(强制更新时间)未更新,达到两个条件其中的一个条件,终端都将发起位置更新。
2)提出一种寻呼卫星及点波束确定算法,通过计算卫星与用户之间的距离确定寻呼卫星的方法,得到卫星及用户的位置,通过转换坐标系求出用户相对于被呼卫星的方位角,之后确定最有可能寻呼成功的波束,该方法将传统的寻呼范围从地面的位置区转移到了多波束卫星的波束。
3)仿真结果表明,本文提出的位置管理策略可以有效地实现高寻呼成功率,减少了信令开销,平衡了寻呼时延。针对不同运动特性的用户,提出最佳的位置更新半径和强制更新时间,在保证良好寻呼成功率的前提下尽可能减少了用户的开销,节约了网络的资源。
2 低轨卫星通信网络的位置管理
2.1 低轨卫星通信网络的特点
在低轨卫星网路中,造成用户与网络相对运动的因素有三种:
1)卫星在轨道上周期性运动带来波束的绝对运动;
2)用户随着地球自转所做的相对运动;
3)用户相对于地球的随机运动。
以上三种因素,前两种的影响比较大,尤其第一种,因为低轨卫星的轨道运行周期只有两个小时左右,终端用户的中低速运动相对于卫星来说可以忽略不计。一般情况下,终端与卫星之间的相对径向角速度是卫星与地球自转速度的合成。
2.2 低轨卫星网络中的动态位置区设计
位置区是人为划定,以便于对用户进行位置管理。常见的划分方法有动态和静态两大类划分方法,传统的静态划分由于比较死板,缺乏灵活性,无法解决“乒乓效应”,已逐步被淘汰,而基于卫星波束的位置区方案位置更新非常频繁,会带来极大的位置管理开销。
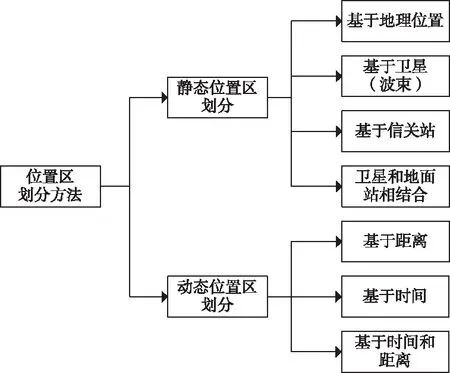
图1 常见的位置区域划分分类
在本研究中,将采用基于用户地理位置信息的动态位置区划分方法,该方法针对不同特性的终端用户设置不同的位置更新半径和强制更新时间,当终端越过自己的位置区或者到达强制位置更新时间,终端发起位置更新。
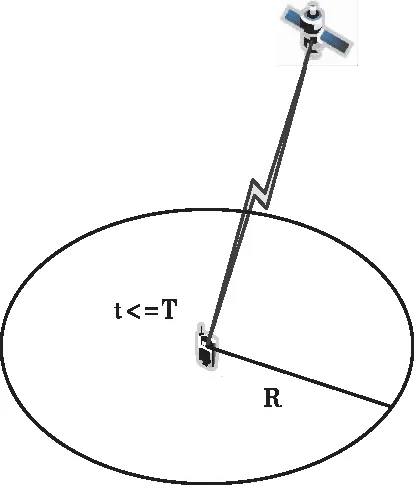
图2 基于用户地理信息的动态位置区划分
2.3 低轨卫星的多波束天线设计
在无线通信系统中,系统的最大容量在于有限的带宽。在地面移动通信系统中,可以将通过将服务区区域划分为多个小区,按照一定的划分规则将它们分开,并采用相同的频率资源(频率复用),以提高系统容量。在低轨卫星通信系统中,为了保证卫星的覆盖范围和增大系统的容量,同时保证一定的服务质量(QoS),卫星通常采用多波束天线,这些点波束在地面上形成连续的蜂窝小区,在不同的点波束间也需采用频率复用。
卫星多波束天线根据其辐射特点可分为等波束宽度和等波束面积两种。等波束宽度多波束天线是指各个波束的半功率宽度(点波束的天线视角)相等,优点是各个点波束天线的结构、参数呈规则分布,只用生成一个点波束天线模型,分别设置不同点波束的指向,这种设计有利于天线的简化,易于实现;等波束面积多波束天线是指点波束小区面积相等,其优点是等小区面积的覆盖,有利于系统为整个地面服务区提供均匀覆盖的系统容量,实现移动性管理相对容易,但这种设计方式在工程上难以实现,在仿真中难以建模,因此难以用到实际的卫星通信系统中。本研究中采用的多波束天线参考了铱星系统的多波束天线设计模式,将48个点波束设置在不同的4层圆上,每层圆上有不同的波束。
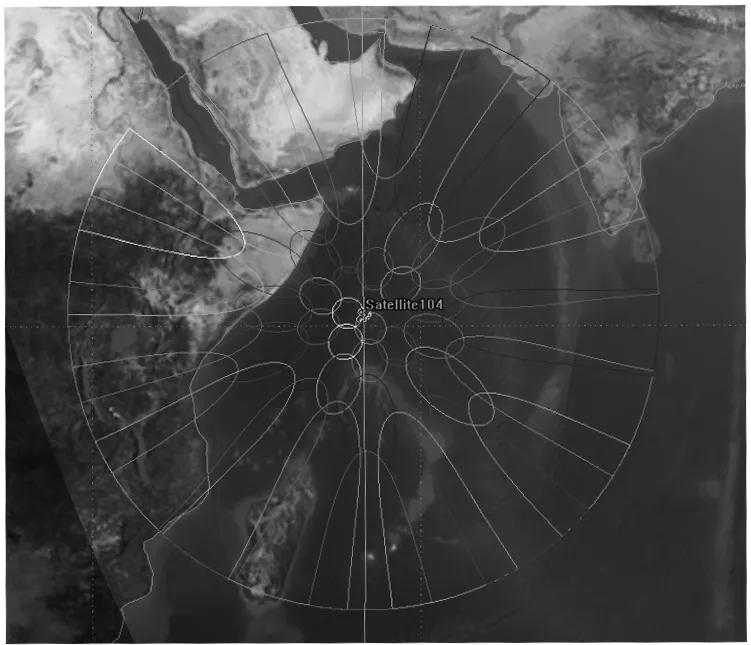
图3 多波束卫星48点波束示意图
3 基于用户自身位置的位置管理方案
3.1 位置管理开销
在位置管理开销中,位置管理总开销(Nt)有位置更新开销(NL)和位置寻呼开销(NP)组成,
Nt=NL+NP
(1)
Nt=NL+NP
(2)
NP=NSP×λ×NBpage
(3)
其中,位置更新开销由更新频率(LUR)和更新所需比特数(NBLUP)决定,位置寻呼(NP)由呼叫到达率(λ),寻呼所需的波束数(NSP)以及寻呼消息所需的比特数(NBpage)决定。
3.2 卫星及卫星点波束确定
用户开机之后,通过进行自我定位,将自己的位置信息进行上报。当需要对用户所处的点波束进行确定时,运控中心将用户的最近一次上报的位置信息作为用户的位置信息,首先通过卫星确定算法,确定一个最合适寻呼的卫星;接着,通过波束确定算法,选择一个合适的波束发起寻呼。
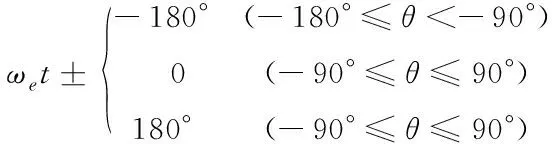
如图4所示,显示了用户与卫星之间的距离。已知被呼用户处于A(lon_A,lat_A)点,卫星处于Si(lon_i,lat_i),而卫星的经纬度和星下点经纬度相同,此时星下点的经纬度可以由以下公式求得(假设卫星的初始时刻在右升节点)
λs(t)=λ0+arctg(cos(I)·tg(θ))-
(4)
φs(t)=arcsin(sin(I)·sin(θ))
(5)
其中,λs(t)、φs(t)分别是卫星星下点的地理经纬度,λ0是t=0时刻卫星所在右升节点地面投影的经度,θ是t时刻卫星在轨道平面与右升节点投影之间的角距,逆时针方向为正,ωe是地球自转角速度,t是卫星运行的时间,±用来表示顺时针和逆时针方向。得到了卫星的经纬度,则卫星星下点与用户的弧线距离可以由以下公式算法
(6)
(7)

(8)
利用三角函数及其推导公式,可得
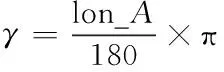
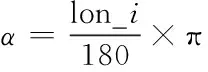
cosθ=sinαsinγ+cosαcosβcosγ
(9)
Di=R×arccos(sinαsinγ+cosαcosβcosγ)
(10)
其中,Di为被呼用户与卫星之间的弧线距离,R为地球半径。
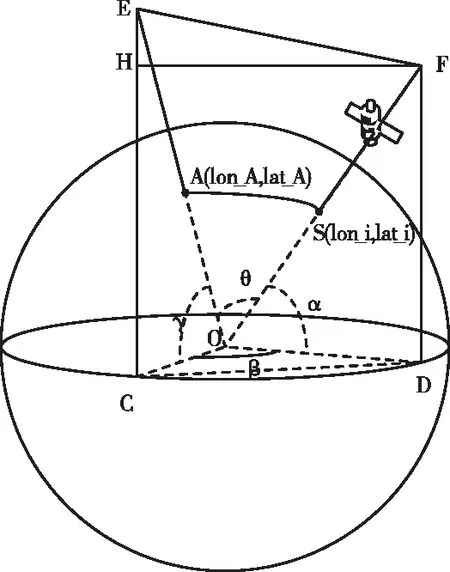
图4 卫星与用户之间的距离
取距离最近的卫星作为寻呼卫星,
Si=min{Di,i=1,2,…,65,66}
(11)
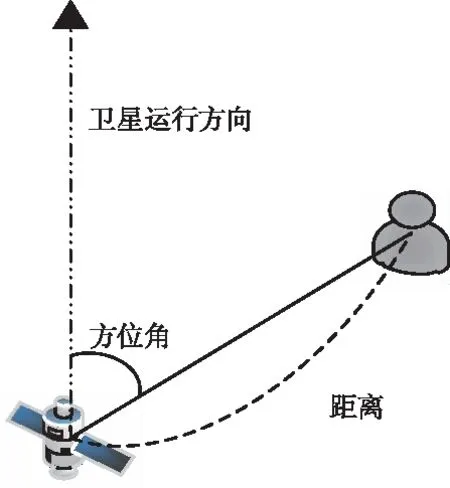
图5 用户方位角
在确定了寻呼卫星之后,得到了寻呼卫星的经纬度,如图5显示了用户与确定寻呼卫星之间的方位角,根据卫星和用户的地理信息,可以计算出用户相对于寻呼卫星的方位角
Δλ=λ2-λ1
(12)
θ=atan2[(sin(Δλ)cos(φ2)),(cos(φ1)sin(φ2)-
sin(φ1)cos(φ2)cos(Δλ))]
(13)
其中,λ2为用户的经度,λ1为卫星的经度,φ2为用户的纬度,φ1为卫星的纬度。
在计算得出了寻呼卫星和用户方位角之后,通过点波束确定流程选定一个波束作为寻呼波束。图6为卫星及点波束确定算法流程图,若得到用户相对于卫星的方位角之后,结合前面得到用户与被呼卫星之间的距离,先比较他们之间的距离,确定用户在卫星四层波束中的哪一层,然后在确定的那一层波束中找到最接近用户的那个波束,记录这个波束信息,并将此波束作为寻呼波束。
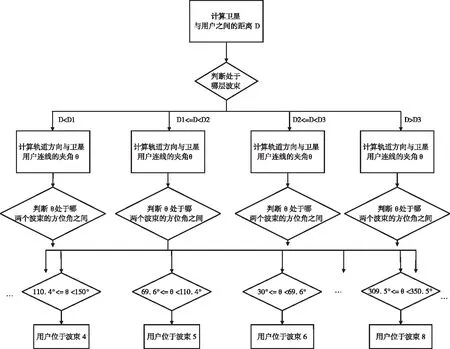
图6 卫星及点波束确定算法
3.3 位置更新
用户以自己的位置更新半径R1为半径画一个圆形,作为自己的动态位置区域,同时,用户自己有一个计时器。当用户出了自己的位置区或者计时器溢出,用户将进行位置更新。当用户由于越过更新半径而发起更新之后,用户将根据自己的运动状态设置一个新的位置更新半径R2,同时用户的计时器清零,用户将处在一个新的位置区。图7显示用户越过位置区示意图,用户将根据自己的状态来决定是否改变自己的位置更新半径。
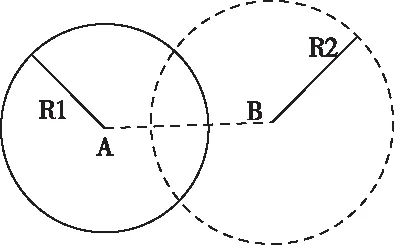
图7 用户越过更新半径示意图
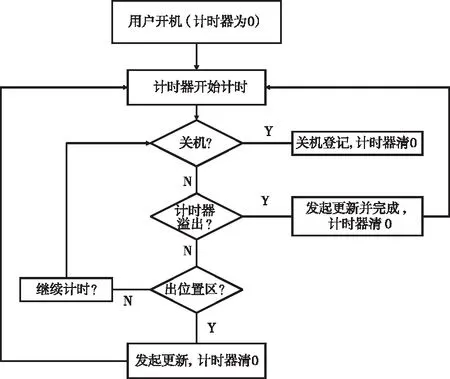
图8 用户判断是否进行位置更新
图8为用户判断是否需要进行位置更新示意图,用户位置更新的触发条件有两个,强制位置更新时间和位置更新半径,这两个中只要满足一个条件,即发起一次位置更新。
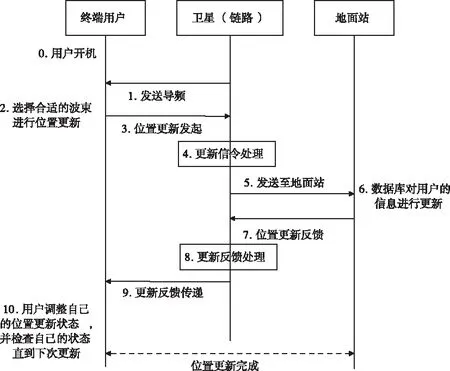
图9 终端用户位置更新流程图
采用动态位置更新方案,其位置更新流程如图所示,其位置更新如图9所示:
Step0:用户开机;
Step1:卫星的波束模块以一定的频率向地面发送导频信息;
Step2:用户在收到卫星的导频信息之后,以一定的准则(最强信号、最大仰角等)选择一个卫星波束进行位置更新;
Step3:卫星波束模块收到用户的位置更新信息,转发至卫星的中央处理器;
Step4:卫星的中央处理器将对该信令进行处理并查看是否与信关站直接连接;若与信关站直接连接,则将该信令发送至信关站;若没有与信关站直接连接,则通过星级链路将该信令发送至与信关站相连的卫星,与信关站相连的卫星把该信令转发至信关站;
Step5:信关站收到来自用户的位置更新信令,转发至运控中心;
Step6:运控中心对用户的位置更新信令处理,若数据库中无此用户,则存储该用户信息;若有,则更新;
Step7:存储、更新完成之后,系统将对该用户的位置更新发送一个反馈信息告知用户已完成位置更新;
Step8~9:位置更新反馈信令将原路返回至用户;
Step10:用户在收到位置更新反馈之后,将自己的更新状态调整为已更新状态,并每隔一定的时间检查一次自己的状态,查看是否需要发起新的位置更新,至此,用户完成一次位置更新。
在Step10中,若由于一些原因,用户在一定的时间间隔后没有收到来自运控中心的反馈信令,则重新发起一次位置更新,直到收到位置更新反馈。
3.4 位置寻呼
寻呼时根据网络的逻辑位置进行。地面控制中心收到主叫用户的呼叫请求之后,解析出被叫用户的相关信息。系统将被叫用户最近一次的位置更新信息作为其寻呼算法的信息。在这个过程中,系统调用星座的星历信息。
3.4.1 不同的寻呼策略
广播寻呼:选定寻呼卫星,在该卫星下的所有波束进行寻呼,该方法寻呼成功率高,时延低,但是开销大。
一次寻呼:系统对寻呼消息进行处理,选定一个合适的卫星和波束,在该波束内发起寻呼。这种方法寻呼开销低,时延低,需要更加精确的用户位置信息,适用于低速用户,但当用户移动速度过快时,寻呼失败率增大,为了提高成功率,不得不将用户更新半径和强制更新时间减小,加大位置更新次数。
二次寻呼:选定寻呼的卫星之后,通过计算得到用户与该卫星之间的距离和方位角,计算出最可能寻呼成功的波束,如寻呼失败,则在该波束的一周进行寻呼。此种方法平衡了寻呼开销和寻呼时延,是一种较为良好的寻呼方法,在本研究中,将采用此种寻呼方法。
多波束并行寻呼:为了解决二次寻呼带来的时延,将寻呼在多个波束同时进行,这种方法比广播寻呼开销小,比一次寻呼开销大,但是保证了一定的寻呼成功率,寻呼时延和广播寻呼时延一样。
逐个寻呼:选定寻呼的卫星之后,通过计算得到用户与该卫星之间的距离和方位角,计算出可能寻呼成功的概率波束,依次寻呼。
分组寻呼:选定寻呼的卫星之后,通过计算得到用户与该卫星之间的距离和方位角,计算出可能寻呼成功的概率波束,按照波束的分组情况进行寻呼。特点:时延和开销的平衡。
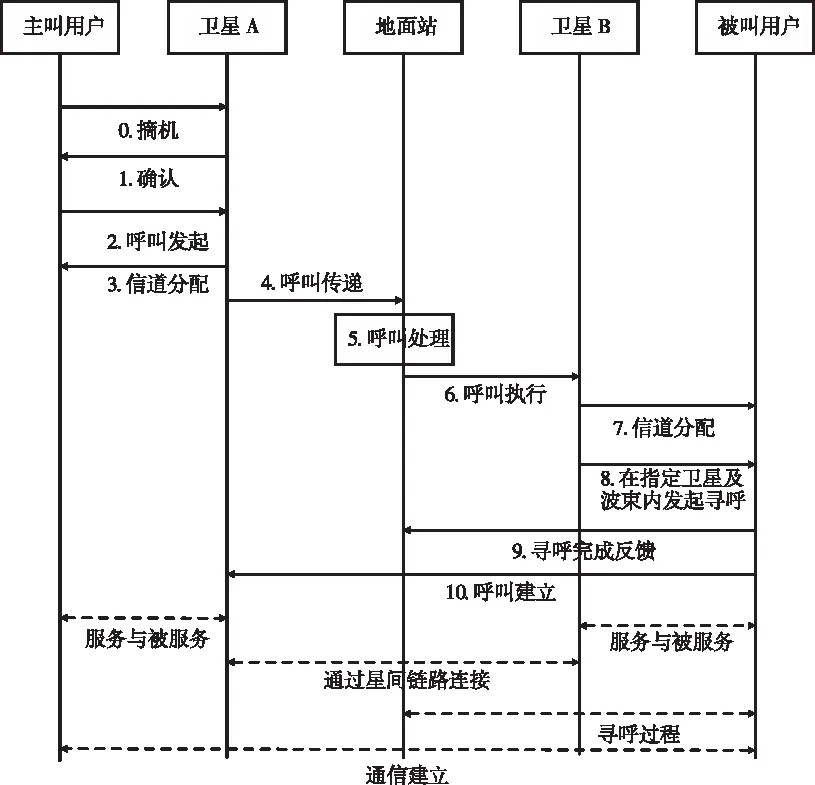
图10 位置寻呼流程图
假设主叫用户的服务卫星为A,被叫用户的服务卫星为B,则寻呼流程如图10所示:
Step0:用户摘机,准备发起寻呼,选择一个合适的卫星上报自己的请求;
Step1:卫星收到请求,若自身的状态(信道是否可以分配、波束是否要即将关闭等)满足该用户的请求,则发送确认消息;若不满足,则发送资源不可用消息;
Step2:主叫用户发起呼叫,并在确认的卫星及波束内进行上报请求;
Step3:卫星给主叫用户分配一个信道;
Step4:卫星收到用户的呼叫,若该卫星与信关站直接连接,将此信息传递至地面站,若不是,则查看哪颗卫星与信关站连接,并将此消息通过星间链路传送至于信关站连接卫星;
Step5:地面站收到主叫用户的呼叫请求,处理该请求,通过卫星及波束算法选定寻呼卫星及波束,并选用一种寻呼策略(广播寻呼、一次寻呼、二次寻呼、多波束同时寻呼等),将寻呼发出;
Step6:地面站将寻呼消息发送至确定的寻呼卫星;
Step7:给被呼用户分配信道;
Step8:在确定的寻呼波束内发起寻呼;
Step9:若被呼用户收到来自地面站的寻呼,给地面站发送一个确认消息,用以告知信关站收到了来自的地面站的寻呼请求;
Step10:被叫用户在完成Step5之后,给主叫用户发送信息,表明收到了主叫用户的请求,可以建立通信链路,至此,一个寻呼完成。
其中,在Step2之后的计时器之内,若没有收到被叫用户的反馈,表明第一次寻呼失败,系统将根据采用寻呼策略的不同采取不同的应对措施,采用二次寻呼策略,系统将在第一次确定的寻呼波束的周围同时发起寻呼。
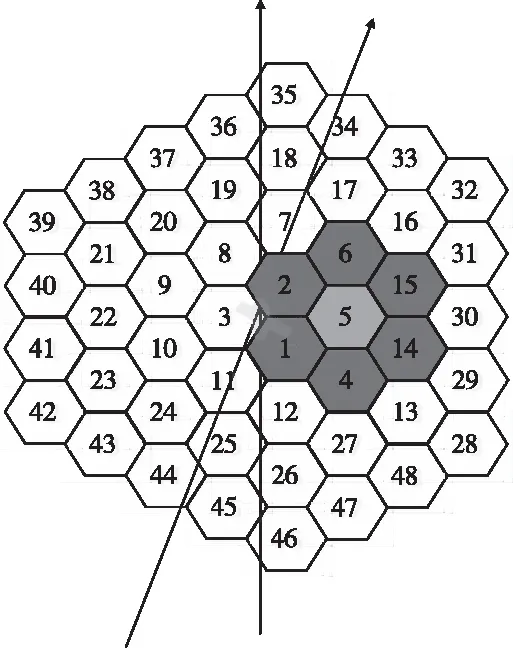
图11 多波束卫星寻呼示意图
4 仿真结果分析
OPNET 是一款网络仿真及优化领域性能较好的软件,它为解决通信网络的仿真和优化,以及高效的网络管理提供了整套的解决方案。此次仿真是基于 OPNET 14.5 版本。
在 OPNET 中的驱动机制是离散的事件。事件是指数据分组到达、时间到来时、切换发生等等网络中发生的变化。离散的事件是指这些事件在时间轴上都是一个个离散的点,当事件发生的时候,仿真时间停止,相应的事件处理程序在该时间点运行,那么在整个时间轴上这些事件是顺序排列的点。OPNET仿真的通信网络可以是固定网、移动网以及卫星网络,所采用的是三层建模机制:最上层为网络域,反映了网络的拓扑结构;再者是节点域,由相应的协议模块构成,反映了设备的特性;最底层是进程域,用状态机的形式来描述协议,反映了协议的具体功能是如何实现的。这种三层模型建模同实际的协议、设备和网络一一对应,能够全面地反映网络的相关特性基于地理位置的卫星通信网络。
4.1 网络模型
仿真平台参考了铱星星座,共有66颗卫星,分布在6个轨道平面上,每个轨道面上有11颗卫星,卫星轨道高度为780km;共设有两个信关站,一个运控中心。

图12 仿真平台网络拓扑图
4.2 关键节点
4.2.1 卫 星节点
卫星节点由波束模块,天线模型,星间链路模块等组成。其中,波束模块负责用户的接入及用户与用户之间的通信,天线模块负责加载及动态更新多波束天线,星间链路模块实现前后左右四条星际链路(反向缝除外),中央处理器模块实现各种信令的处理。
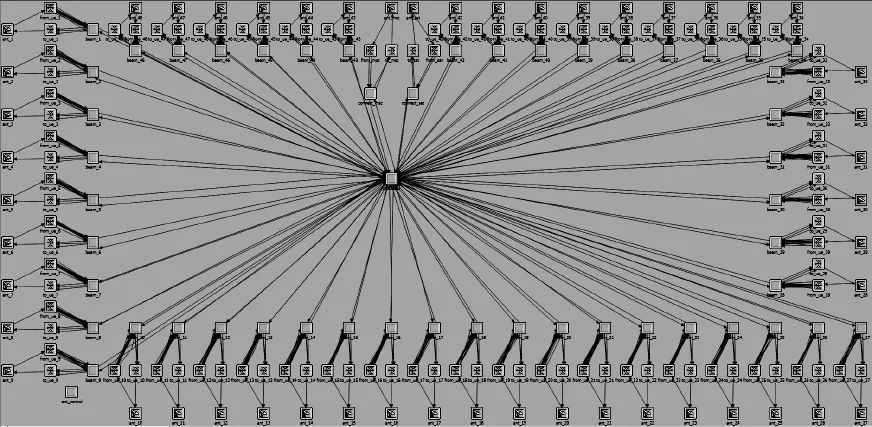
图13 卫星节点模型
4.2.2 终端用户节点
用户模块有两部分组成,一部分实现通信终端的功能,包括用户的接入,收发信令等,另一部分负责用户的移动,实现用户的随机运动,包括方向、速度、运动时间等。
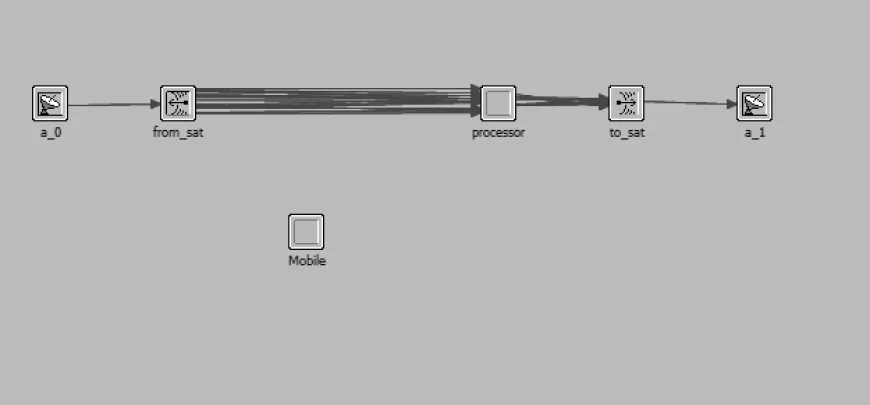
图14 终端用户节点模型
4.3 仿真结果分析
仿真将针对几种类型的终端用户进行,下表分别给出系统的仿真参数和不同移动终端的配置参数。每条更新消息为1108比特,每条寻呼消息为168比特[11],用户每2-3分钟检查一次自己的状态,用以判断是否需要发起新的位置更新。
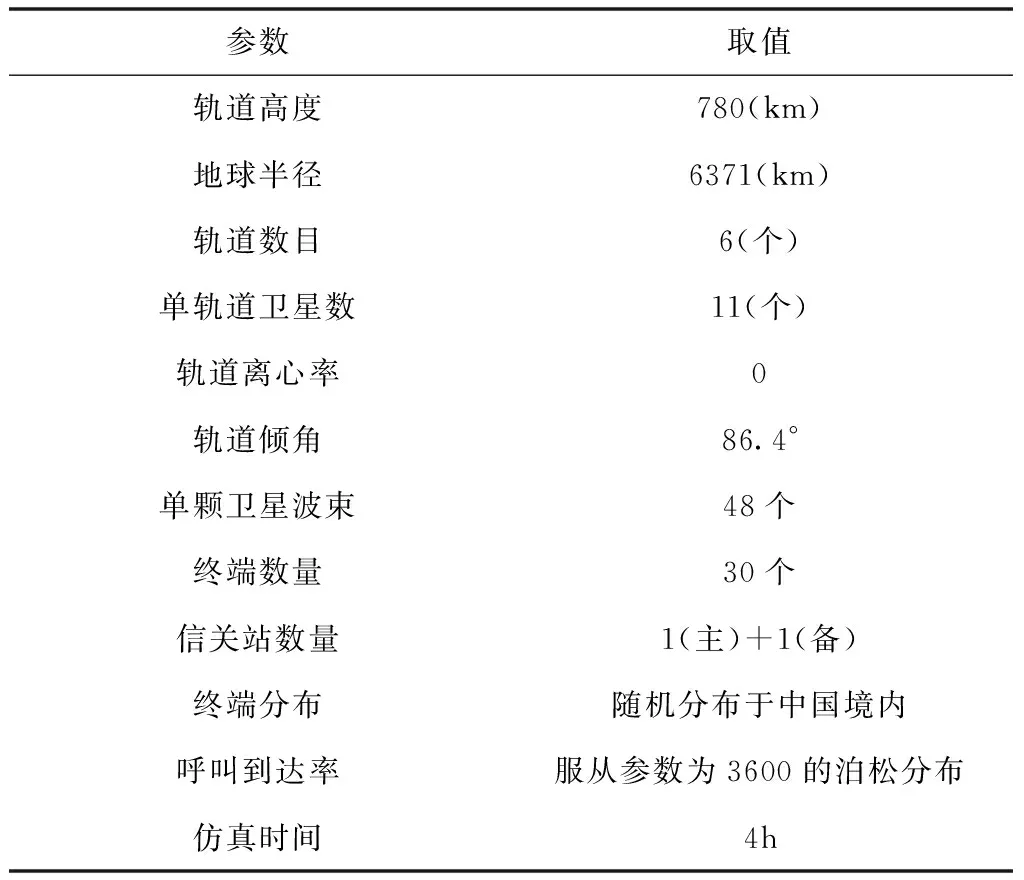
表1 系统仿真参数
参考UMTS中关于移动模型的定义及真实场景下用户的移动特性,将终端用户的移动模型设置为以下几类:A类终端代表地面行人;B类代表地面普通车载终端;C类代表火车终端;D类代表动车终端;E类代表高速铁路终端;F类代表普通民航客机终端。
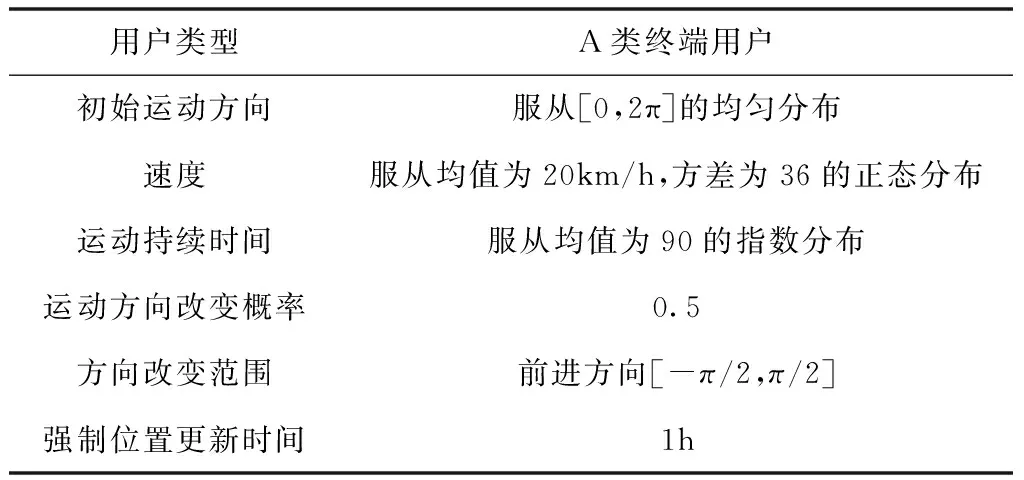
表2 A类终端用户参数设置
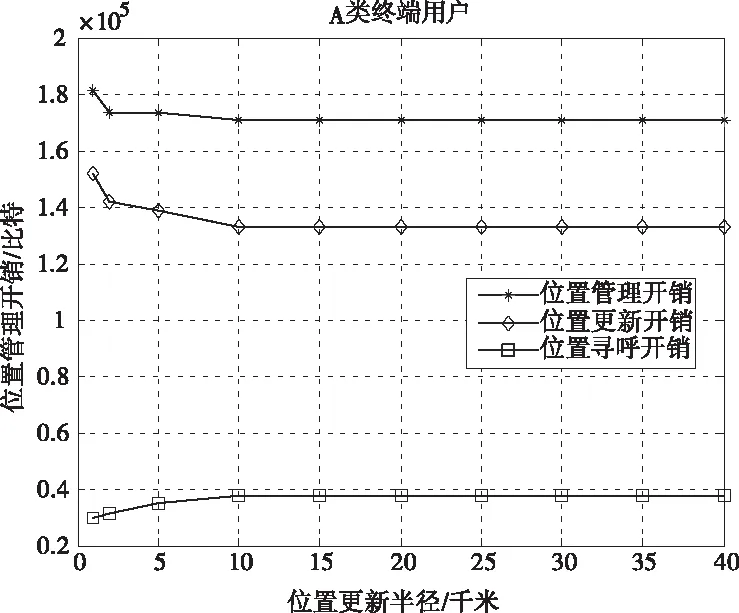
图15 A类终端用户位置管理开销
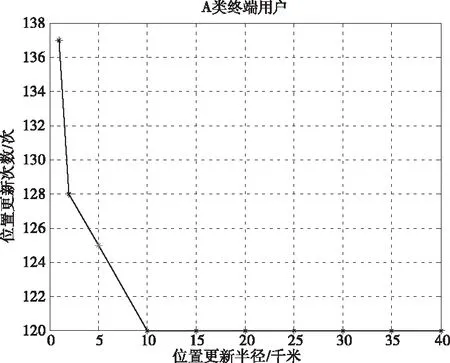
图16 A类终端用户位置更新次数
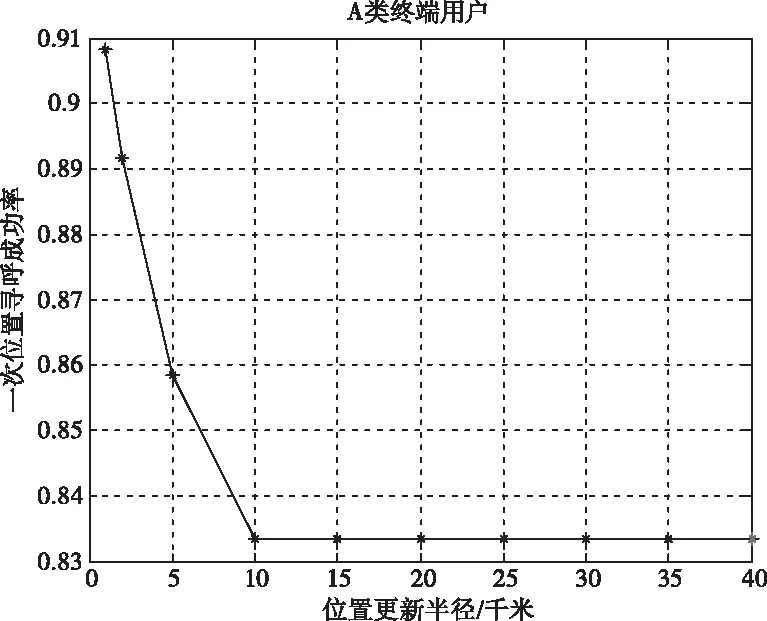
图17 A类终端用户一次位置寻呼成功率

表3 B类终端用户类型参数设置
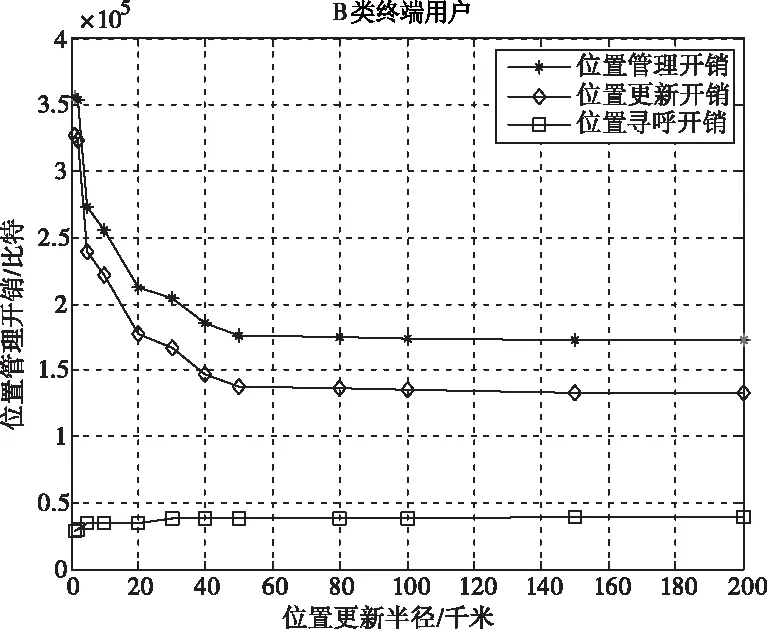
图18 B类终端用户位置管理开销
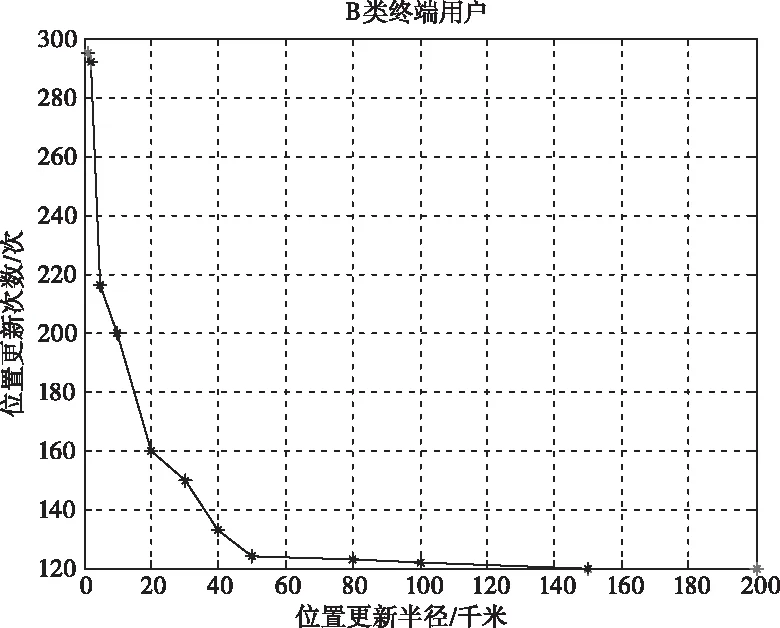
图19 B类终端用户位置更新次数
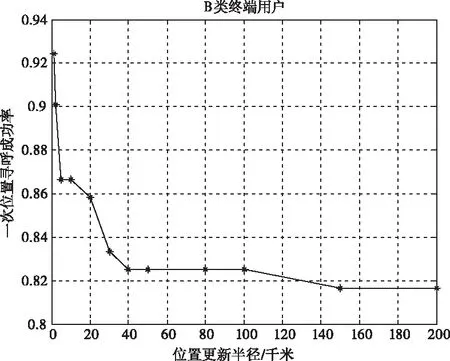
图20 B类终端用户一次位置寻呼成功率
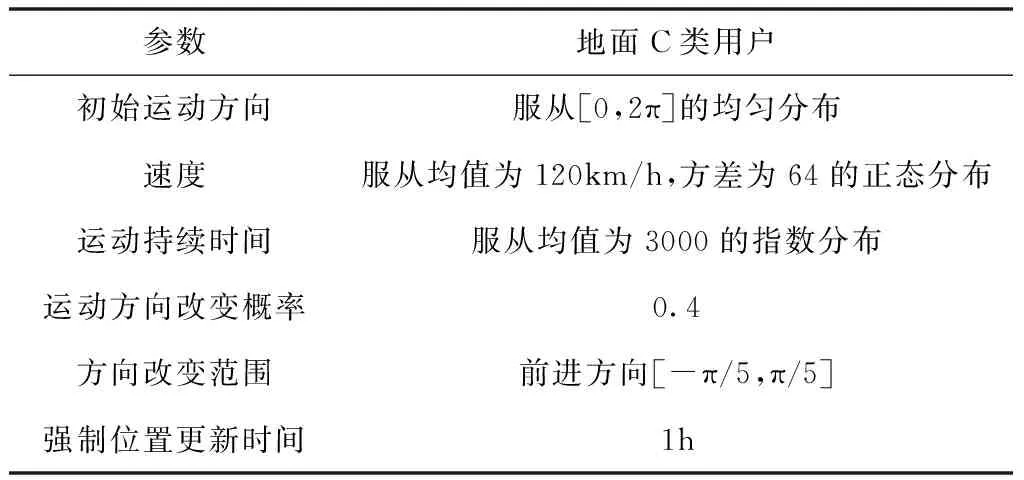
表4 C类终端用户类型参数设置
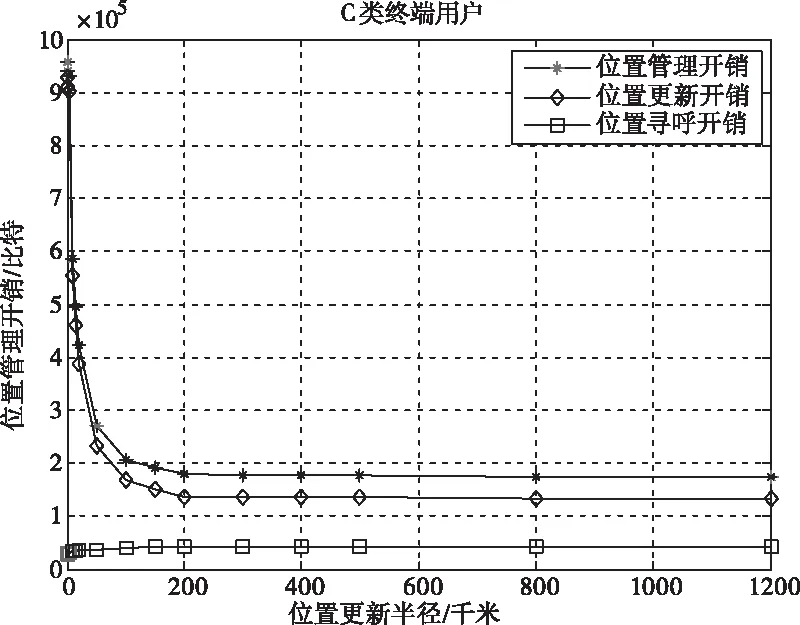
图21 C类终端用户位置管理开销
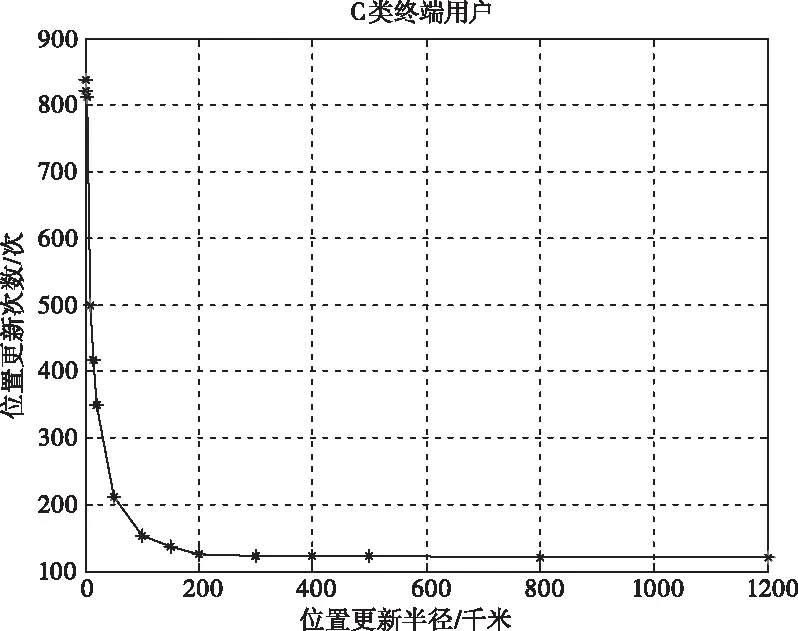
图22 C类终端用户位置更新次数

图23 C类终端用户一次位置寻呼成功率
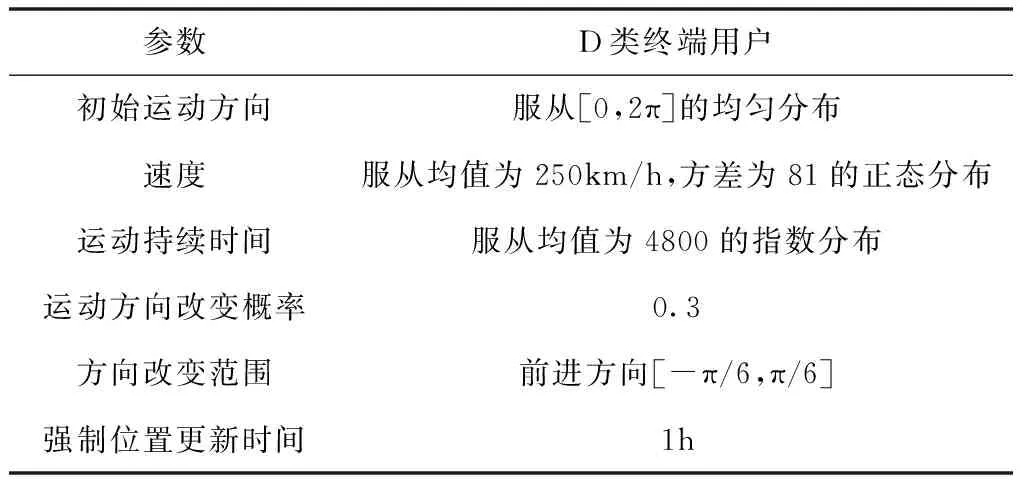
表5 D类终端用户类型参数设置
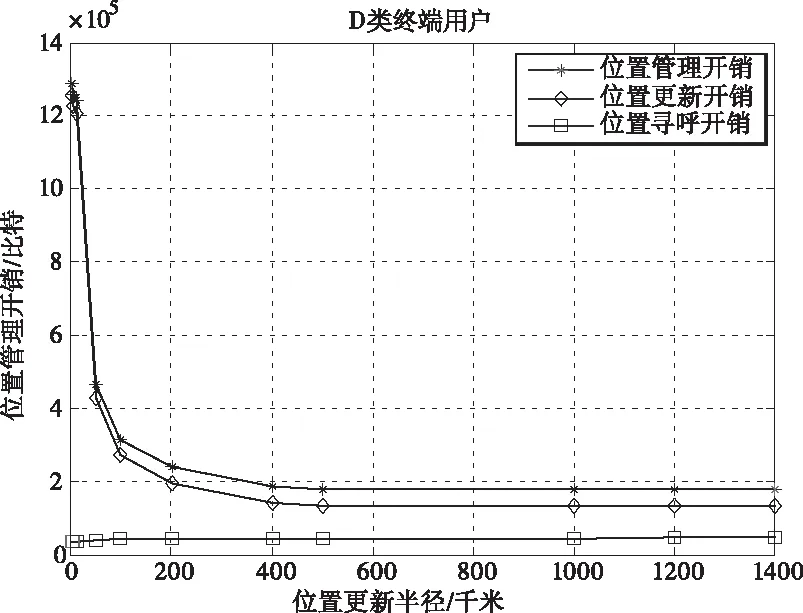
图24 D类终端用户位置管理开销
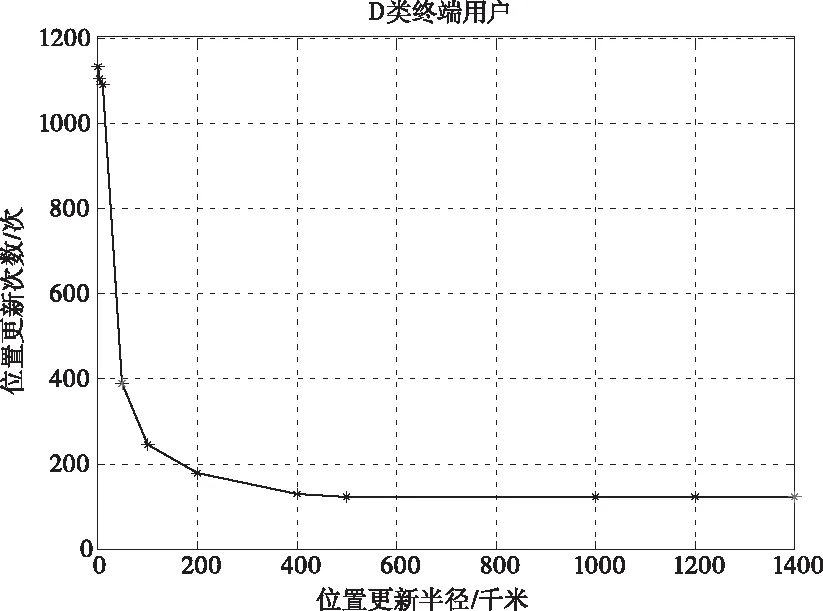
图25 D类终端用户位置更新次数
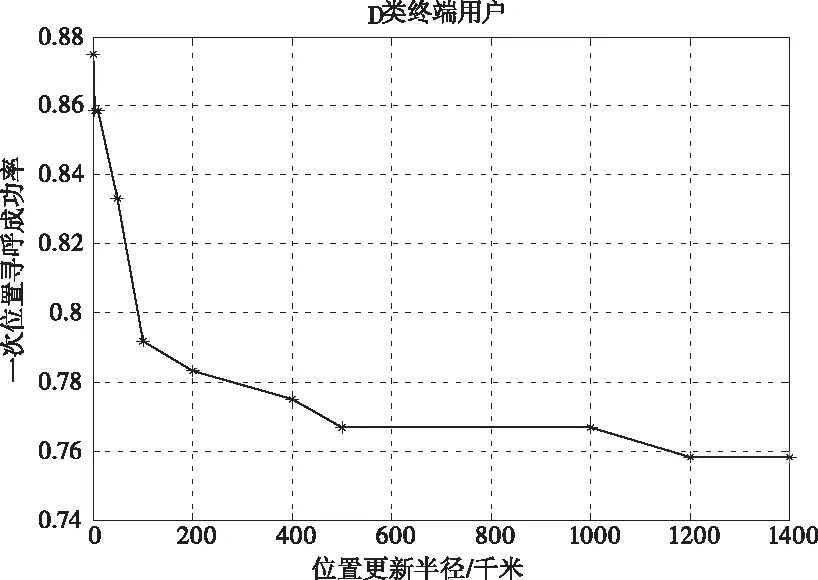
图26 D类终端用户一次位置寻呼成功率
图15~26分别显示A、B、C、D类四种终端用户的位置管理开销、位置更新次数和一次寻呼成功率。对于该四类终端用户,移动速度相对较小,随着位置更新半径的增大,位置管理开销和更新次数在减小,一次位置寻呼成功率也变化不大。当位置更新半径到一定的值之后,位置管理开销、更新次数以及一次寻呼成功率趋于一个定值。故为A、B、C、D四类终端用户分别设置10~40km、40~80km、200~400km、500~600km的位置更新半径可以到达位置管理开销最小。
表6 E类终端用户类型参数设置
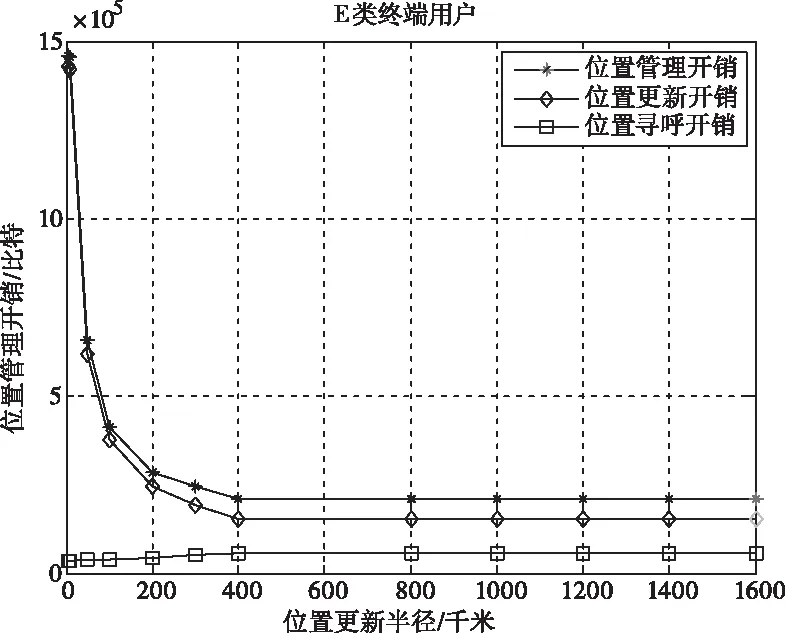
图27 E类终端用户位置管理开销

图28 E类终端用户位置更新次数
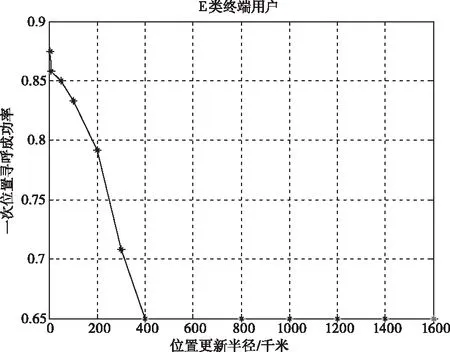
图29 E类终端用户一次位置寻呼成功率
图27~29为E类终端用户的位置管理开下、更新次数和一次寻呼成功率。对于E类终端用户,由于其移动速度相对快,在强制位置更新时间内,其运动出了一定的距离,位置更新半径超过400km,其管理开销到最值。但是随着更新半径增大,一次寻呼成功率有明显的下降,二次寻呼带来时延,故应该灵活设置位置更新半径,对于时延不受限终端用户,更新半径设置为400km,对于时延受限终端用户,更新半径设置应根据具体情况考虑。
表7 F类终端用户类型参数设置
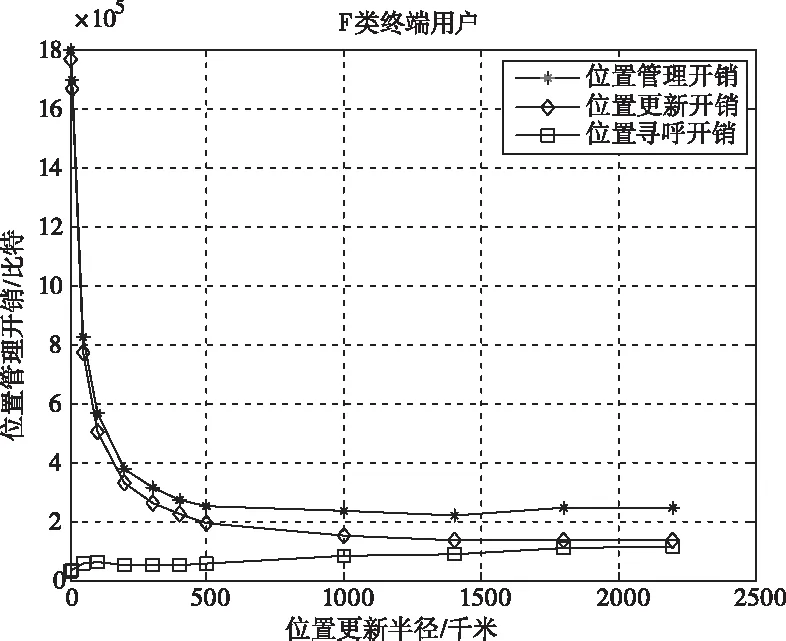
图30 F类终端用户位置管理开销

图31 F类终端用户位置更新次数
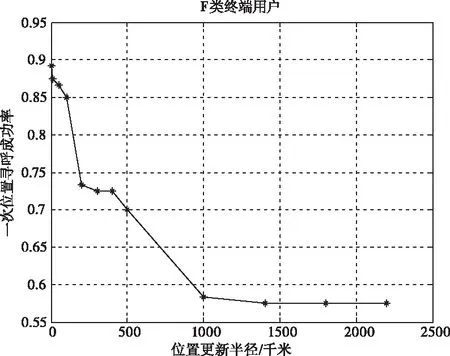
图32 F类终端用户一次位置寻呼成功率
图30~32为F类终端用户的位置管理开销、位置更新次数和一次寻呼成功率。该类终端用户移动速度较快,且方向改变的概率较小,随着位置更新半径的增大,其位置管理开销先减小,之后缓慢上升。故其位置更新半径设置为1000~1500km能够实现位置管理开销最小。
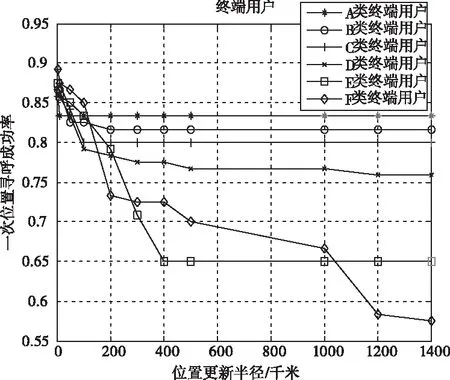
图33 各类终端用户一次寻呼成功率
从图33可以看出,随着位置更新半径的增大,各类终端的一次位置寻呼成功率在下降,当位置更新半径增大到某个值时,一次寻呼成功率趋于一个定值。
5 结束语
本研究充分利用了卫星通信的特点,在卫星具有星上能力和终端具有自主定位能力并采用单信关站的低轨卫星通信系统中,提出了一种基于用户自身位置信息的位置管理策略。与传统的位置管理相比,该方案摒弃了传统的多信关站模式,简化了系统的复杂度,提高了可实施性。之后,结合实际场景中终端的运动情况,针对具有不同移动特性的终端用户,分别设置不同的位置更新半径进行仿真,仿真结果表明,随着位置半径的增加,位置管理开销和一次寻呼成功率趋于一个极值,当位置更新开销达到理论最小值时,其一次位置寻呼成功率也比较高,表明该策略可以较好地实现位置管理,对于低轨卫星通信网络的发展和建设具有一定的参考价值。
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
铁路通信信号工程技术(2019年10期)2019-11-06
通信技术(2019年3期)2019-05-31
中国交通信息化(2019年2期)2019-03-25
消费导刊(2017年24期)2018-01-31
中国新通信(2016年21期)2017-01-06
互联网天地(2016年2期)2016-05-04
中国新通信(2016年2期)2016-03-11
舰船科学技术(2015年8期)2015-02-27