基于改进自抗扰控制的微电网混合储能控制策略
2022-02-28 12:07杨丰萍程权周铭栀张殷
科学技术与工程 2022年5期
杨丰萍, 程权, 周铭栀, 张殷
(华东交通大学电气与自动化工程学院, 南昌 330013)
随着世界经济的发展,传统不可再生能源存在的资源短缺以及焚烧对环境的污染等问题日趋严重,风能发电、光伏发电成为当前可再生能源发电的主流[1]。然而,微电网可再生能源的不可控性以及随机波动性的制约,成为电力系统运行稳定的强大阻碍。为了解决这种不确定因素所带来的难题,能够更高效地利用分布式电源,微电网的能量管理成为人们广泛研究的课题。超级电容与蓄电池混合储能为当前新型储能系统,不仅利用了超级电容的高功率型储能的优点,又利用了蓄电池的能量型储能的优势,将各自所具有的优点互补,成为微电网系统发挥技术优势和经济优势的桥梁[2-3]。
近些年来,中外学者及研究人员在自抗扰控制算法上进行深入广泛的研究,其在微电网的应用上逐渐走向成熟。王坦坦等[4]提出了一种传统复合控制的方法,由一阶自抗扰与二阶低通滤波器形成的混合储能系统,以电流内环自抗扰来跟踪电流的参考值,电压外环自抗扰使得直流(direct current,DC)母线电压维持稳定状态,证明了自抗扰控制技术与传统比例-积分(proportion-integration,PI)控制相比精度更高,动态响应速度更快,可平抑直流母线电压的波动性,提高电网运行的稳定。付建哲等[5]设计了一种将一阶非线性自抗扰控制器与二阶线性自抗扰控制器相结合的闭环控制系统结构,并将其运用于微电网蓄电池储能控制上,结果表明该控制方法可解决传统PI控制方式中超调量和响应时间不易兼顾的难题,抗干扰能力有所提高。张刚等[6]在微电网蓄电池储能控制上采用基于线性自抗扰的超导磁储能系统,利用线性自抗扰可估计并补偿扰动的特性,改进储能系统的电能质量,结果表明该控制方式具有抗干扰能力强、响应速度快等优点。矛靖峰等[7]提出了一种基于自抗扰补偿的混合技术阶非线性下垂控制策略,并应用于直流微电网系统中,该控制策略可在轻载或重载的情况下,可改善电压的调节能力,其应用增强了系统的抗干扰能力,系统适应性相对提升。
传统比例-积分-微分(proportion-integration-differentiation,PID)是基于线性化的一种控制技术,由于DC/DC变换器模型属于非线性,混合储能装置的输入电压以及负载也是非线性的,其具有时变性、不可预测性的特点,且具有耦合性,因此这种误差反馈控制难以取得较好的控制效果。为解决上述问题,现提出一种改进自抗扰控制(active disturbance rejection control,ADRC)下的微网混合储能综合控制策略,以改进ADRC控制代替传统的PID控制,同时根据超级电容的快速充放电特性以一种综合控制方式进行控制,从而对超级电容的充放电进行模式切换,该方法不仅对于因发电的随机波动性而对直流母线电压的波动进行改良,还有助于提高系统的动态响应速度,增强系统的稳定性。
1 微电网系统结构
1.1 交流微电网整体结构
典型的微电网整体结构图如图1所示,由分布式电源、蓄电池与超级电容混合储能装置、交直流母线、电网、负荷所构成[8]。

图1 微电网整体结构图Fig.1 The overall structure of the microgrid
1.2 混合储能单元及结构分析
微电网拓扑结构如图2所示,以光伏发电为例,由蓄电池与超级电容组成混合储能系统,因蓄电池能量密度大而功率密度小,其动态性能较差,超级电容功率密度大而能量密度小,动态性能较好,所以将两者结合,性能互补,混合储能系统的整体性能有效提高[9]。经研究,选择蓄电池与超级电容器分别经过DC/DC变换器连接在直流母线上的方法,该方法可分别对蓄电池和超级电容进行独立控制实现功率的充放电,稳定直流母线电压。
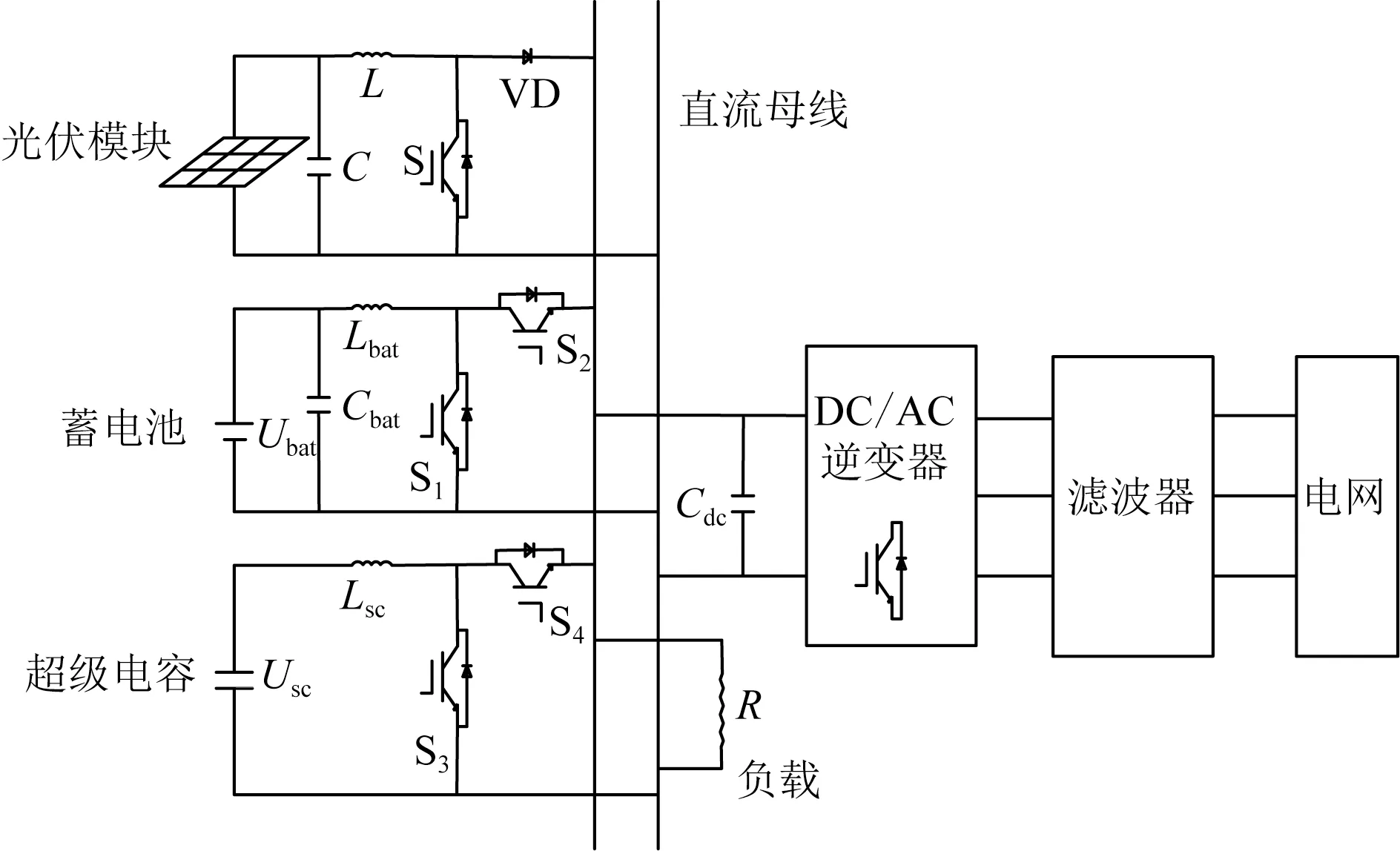
Ubat为蓄电池电压;USC为超级电容电压;L、Lbat、Lsc分别为光伏模块、蓄电池、超级电容所在电路的电感;Cbat为蓄电池滤波电容;Cdc 为直流母线端滤波电容;S、S1、S2、S3、S4为开关管;R为负载图2 微电网拓扑结构图Fig.2 Topological structure diagram of microgrid
1.3 双向DC-DC变换器的数学建模
双向DC-DC变换器的结构如图3所示。
根据图3建立Buck电路与Boost电路的数学模型,以状态空间平均法以及小信号建模,可得Boost电路传递函数为
(1)

Udc(t)、U(t)分别为直流母线电压和储能侧电压;VT1、VT2为开 关管;L为电感;C1为储能侧电容图3 双向DC-DC变换器结构图Fig.3 Structure diagram of bidirectional DC-DC converter
(2)
Buck电路传递函数为
(3)
(4)
式中:IL为电感电流;Dboost为升压电路下的占空比;C2为直流母线处的等效电容;R为储能侧等效电阻;C1为储能侧等效电容;GV2(t)、Gi2(t)为Boost电路下的电压、电流传递函数;GV1(t)、Gi1(t)为Buck电路下的电压、电流传递函数。
2 改进自抗扰下的混合储能研究
2.1 经典自抗扰控制算法基本结构
自抗扰控制(active disturbance rejection control,ADRC)技术由中科院韩京清教授所提出,这项算法继承了传统PID控制的精华,对于被控对象是否为精确模型几乎无任何要求,且引入了基于现代控制理论的状态观测技术实时估计总扰动,在传统的PID控制中融入这种抗干扰技术,最终设计出一种全新控制器广泛应用于工程实践中[10-11]。一般来说,ADRC由3
个组件所构成:跟踪微分器(tracking differentiator,TD)、非线性状态反馈(non-linear state error feedback,NLSEF)和扩张状态观测器(extended state observer,ESO),ADRC总体结构框图如图4所示[12]。
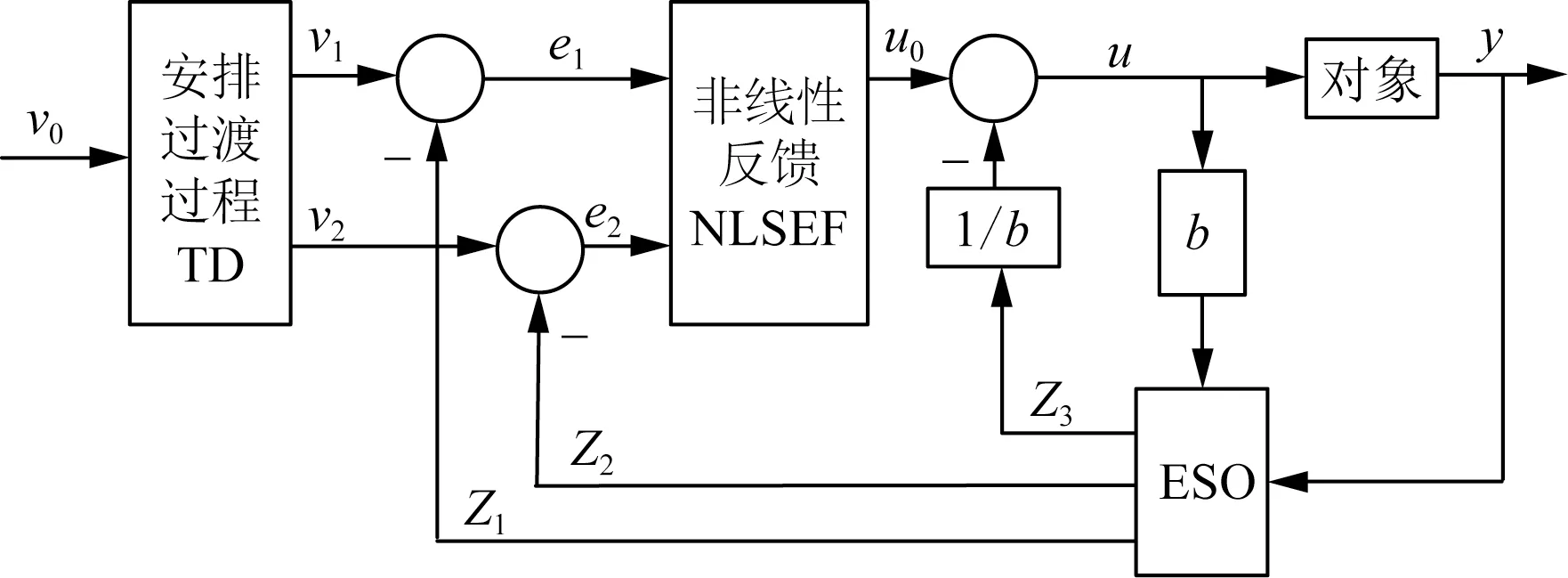
v0为目标跟踪信号;v1为经处理的目标跟踪信号;v2为经处理的目标跟踪信号的微分;e1为误差信号;e2为误差的微分信号;u0为所形成的控制律;u为经扰动估计量补偿后的最终控制量;Z1、Z2为系统跟踪控制的观测值,Z3为系统不确定函数变量的估计;b为常 数;y为输出图4 ADRC结构框图Fig.4 ADRC structure diagram

2.2 二阶自抗扰控制器的设计
传统PID控制算法因信号的初始误差很大,很容易引起超调,信号输出响应的跟踪速度慢,适应性与鲁棒性不强,导致输出信号的质量很低。然而传统ADRC控制技术虽然在一定程度上解决了上述问题,但直流母线电压在光照强度的随机变化时仍然存在着较强的波动。因此将一种改进的二阶自抗扰控制器引入双向DC/DC变换器控制系统中,电压外环和电流内环以改进ADRC代替传统PID控制,并设计一种储能系统综合控制结构,从而很好地平抑了直流母线电压,提高了系统的抗干扰能力及动态响应性能。

为直流母线参考电压;udc为电压实际输出值;为形成的电流及占空比控制律;为经扰动估计量补偿后的内环电流及占空比控制量;HV和Hi为电压与电流采样的反馈系数;iL为电流实际输出值;Gm(s)为PWM调制函数;Gid(s)为电感电流与控制量占空比 的传递函数;Gvi(s)为电感电流与直流母线电压的传递函数图5 ADRC双闭环控制结构框图Fig.5 ADRC double closed-loop control structure block diagram
2.2.1 跟踪微分器的设计
跟踪微分器即安排过渡过程,主要目的是输入量不要有跳变,便于实际系统实时跟踪,它不仅可尽可能快速地去跟踪输入信号,也可近似地给予输入信号的微分信号。二阶离散化非线性跟踪微分器控制表达式为
(5)

fst[v1(k)-v0,v2(k),r,h0]=-r*sat[g(k),δ]
(6)
饱和函数表达式为

(7)
非线性函数g(k)表达式为
(8)
式(8)中:sign()为符号函数;δ为线性段区间长度;δ1为积分步长限制下的线性区间长度。δ和δ1及y(k)由式(9)求得
(9)
2.2.2 扩张状态观测器的设计
扩张观测器(ESO)是一个状态观测器,对系统输出和输入信号的状态及扰动进行观测。二阶离散化非线性扩张状态观测器控制表达式为
(10)
式(10)中:ε1为非线性函数误差;h为积分步长;z1(k)为电流内环采样信号的跟踪信号;z2(k)为总扰动;z3(k)为系统总扰动的估计值;α1、α2为非线性因子;β01、β02、β03为可调参数,作为状态误差的反馈增益;b为放大系数。
(11)
式(11)中:ε为系统的输入误差;α影响fal函数非线性段区间的长度。
2.2.3 改进的非线性状态误差反馈控制律的设计
传统PID控制规则为
(12)
式(12)中:u(t)为控制量;KP为比例增益;KI为积分增益;KD为微分增益;e(τ)、e(t)为被控量与给定值的偏差,其中t为当前时间,τ为积分变数,数值从0到当前时间t。
在以上控制规则中,比例环节是基于偏差进行调节,当产生偏差时,控制器立刻产生控制作用从而减少误差,提高系统调节的灵敏度;积分环节对误差进行记忆,可消除静差,增强系统的无差度,从而避免系统振荡的发生;微分环节反应误差变化的趋势,可在系统产生严重超调之前及时给予一个修正信号。改进的非线性状态误差反馈控制律正是在传统PID控制的思想上进行调节,其结构框图如图6所示。将非线性增益可调参数β1和β2类比 PID控制中的比例环节与积分环节的增益,安排过度过程(TD环节)所产生的输出v1与扩张观测器(ESO环节)所产生的输出z1相减得到e1误差量,其通过积分后得到e0。因此,相当于引入了积分环节增益可调参数β0,和传统非线性误差控制律相比,添加了一处积分环节,提高了系统的稳态性能,跟踪精度有所提高,与此同时再引入非线性函数fal,可得电流内环未补偿控制量u0表达式为
u0=β0fal(e0,α0,δ)+β1fal(e1,α1,δ)+
β2fal(e2,α2,δ)
(13)

1/s为积分模块控制;e0为误差的积分信号图6 改进的ADRC结构框图Fig.6 Improved ADRC structure block diagram
类比于PID积分环节从而引入非线性fal函数,若令δ=0.2,α=0.5,得到误差e与函数fal的关系如图7所示。因此,从图7中可以观察出fal函数具有的特性:小误差,大增益;大误差,小增益。通过调节非线性参数α,在出现不同的输入误差时,产生满足需求的反馈增益,从而在系统满足较好的稳态性能的基础上,使其能更快地达到稳定状态,进而提高系统的稳态性能。

图7 非线性fal函数关系图Fig.7 Non-linear fal function relationship diagram
根据图6结构框图可以得知,改进的非线性状态误差反馈控制律控制规则表达式为
(14)
式(14)中:α0、α1、α2均为可调参数。
2.3 混合储能系统控制策略
为防止蓄电池过于频繁的充放电,延长其使用寿命,同时达到更好的平抑直流母线电压波动的效果,在传统的控制系统下做出改进,使得超级电容储能控制系统根据光伏发电的随机性和波动性实现恒流充放电的模式下工作,进而减少蓄电池充放电使用次数。如图8所示为蓄电池储能工作在低频分量的状态下实现双闭环控制,图9为超级电容储能采用综合控制策略。
该控制策略利用了蓄电池与超级电容各自的优点,超级电容既控制了波动所带的高频功率,又控制了蓄电池慢响应速度所带的低频功率,达到了更好的控制效果,可快速调节直流母线电压功率平衡,减小直流母线电压波动。功率平衡条件为

udc为直流母线电压实际输出值;idc为误差信号经ADRC控制器的输出电流信号;fLPF为低通滤波模块;为蓄电池内环参考电流;ibat为蓄电池实际电流;Dpwm12为占空比;SW1、SW2为PWM 输出信号图8 蓄电池储能控制Fig.8 Battery energy storage control

ierr为经ARDC控制器的输出电流信号滤波前后的误差值;ibat-err为蓄电池电流的误差信号;ubat为蓄电池电压;usc为超级电容 电压;Dpwm3、Dpwm4为占空比;SW3、SW4为PWM输出信号图9 超级电容储能控制Fig.9 Super capacitor energy storage control
PPV=Pbat+Psc+Pload
(15)
式(15)中:PPV为光伏电池板功率;Pbat为蓄电池功率;Psc为超级电容功率;Pload为负载功率。
超级电容补偿电流ierr表达式为
(16)

(17)
式(17)中:Pbat-dc为蓄电池未补偿而超级电容补偿时的功率;ubat、usc分别为蓄电池和超级电容的电压。
储能系统的充放电与可再生能源的发电和负载有关,当光伏电源无法达到负载所需的功率要求时,混合储能系统需要提供能量以稳定直流母线电压,此时超级电容器切换为恒流放电模式下进行工作,而双向DC/DC变换器等价于在升压电路下工作,系统给储能电感充电后,通过控制另一桥臂下的开关管来完成恒流放电,而给储能电感充电形成回路的开关管处于断开状态,恒流放电时所控制的开关管其导通占空比表达式为
(18)
式(18)中:Dpwm4为开关管S4的占空比;ierr为参考电流与实际电流所对比的误差量;KPI为比例积分系数。
当光伏电源的发电量较为充足,且比负载所需求的功率多,此时在混合储能模块未达到充满电的情况下,光伏电源既可满足负载的功率需求,还可以为储能系统提供部分电量,混合储能系统转为充电模式。光伏系统不但为负载提供功率,而且在超级电流恒流充电的情况下维持直流侧网压波动较小,为直流母线电压的稳定提供一定的保障。此时超级电容转为充电模式,而双向DC/DC变换器等价于在降压电路下工作,通过控制电感电流实现了恒流充电,这时充电回路所对应的开关管的导通占空比表达式为
(19)
3 算例仿真分析
为验证上述所研究的控制策略的有效性,在MATLAB/Simulink环境下搭建基于综合控制策略的微电网混合储能仿真模型,分别对经典PID双闭环控制方式、传统ADRC双闭环控制方式以和改进ADRC双闭环控制及改进ADRC综合控制方式下的微电网储能系统进行仿真分析,仿真时间截取至0~3 s。
ADRC控制器参数设计如下。
仿真步长h设置为0.01,安排过渡过程TD中表示跟踪快慢的r设置为100。
扩张状态观测器ESO中参数设置:β01=100;β02=200;β03=300;α1=0.5;α2=0.25;δ=10。
非线性误差反馈NLSEF中参数设置:α0=-0.9;α1=0.8;α2=2;b=1;δ=10。
混合储能控制仿真参数如表1所示。
如图10所示为系统直流母线电压仿真结果,将本文方案分别与传统PID双闭环储能控制和传统ADRC双闭环储能控制以及改进ADRC双闭环储能控制(未采用本文方案)方案进行对比分析。可以看出,基于传统PI双环控制系统在0.3 s时电压上升时刻,其电压波动至647.5 V,经0.25 s才恢复至稳态560 V,而另外3种控制方案在此刻的电压波动有明显提高,其中本文方案的电压波动值586.3 V为最小,并且0.1 s便恢复平衡,所达到平衡速度与其他方案相比为最快。在1 s时刻,传统PI双环控制与传统ADRC控制其电压上升产生波动,分别波动至606.5 V和570 V,经0.25 s才达到母线电压的设定值,改进ADRC储能控制在一定程度上缓解了电压的波动,并且在平衡速度上有所提高,然而本文方案所产生的结果表明其电压大小仅仅是极小范围的浮动,可近似为560 V,在调节时间上本文方案相比于传统控制策略减少了25%。

表1 混合储能控制仿真参数表Table 1 Hybrid energy storage control simulation parameter table
同样的,在1.5 s和2 s时刻,本文方案所在电压为560 V,无超调,而未采用综合控制策略下的改进ADRC储能控制仍然具有较小的波动,传统PI双环控制与传统ADRC控制电压上升产生明显波动,再次说明该控制策略在减小电压波动上所具有的优良效果。
4 结论
针对微电网直流母线电压波动及冲击问题,提出基于改进ADRC的综合控制策略,通过推导并分析验证了该控制系统的有效性与可行性,最后将该控制系统与传统PID控制和传统ADRC控制策略以及未采用综合控制策略的改进自抗扰控制进行仿真分析,得出以下结论。
(1)传统PID控制以及传统ADRC控制下系统稳定性较差,改进ADRC控制在一定程度上提高了系统的稳定性,减小了直流母线电压的波动和冲击,但所提的改进型ADRC综合控制策略在平抑直流母线电压波动上具有更加优良的效果。
(2)在同样的光照条件及其他环境约束下,本文方案的响应时间缩短,其动态响应速度更快,精度更高。
由此验证了本文方案具有更好的平抑直流母线电压波动的效果,响应速度有所提高,增强了微电网运行的稳态性能,鲁棒性更加优良。

图10 4种控制方案仿真结果对比Fig.10 Comparison of simulation results of four control schemes
猜你喜欢
煤气与热力(2021年6期)2021-07-28
煤气与热力(2021年4期)2021-06-09
课程教育研究·学法教法研究(2018年20期)2018-08-11
自动化与仪表(2018年7期)2018-07-31
通信电源技术(2018年3期)2018-06-26
能源(2017年12期)2018-01-31
中国设备工程(2017年24期)2017-12-28
汽车维修与保养(2017年1期)2017-05-15
汽车维修与保养(2016年1期)2016-09-07
汽车维修与保养(2016年12期)2016-03-14