外军无人蜂群作战概念研究进展及分析
2022-03-04 08:27谷康
航空兵器 2022年1期


摘 要:无人蜂群作战概念近几年来一直是世界各国竞相发展的重点。 本文列举了近几年国外在蜂群作战方面的最新研究进展和取得的阶段性成果,并总结分析了目前国外蜂群作战概念的主要技术发展方向,包括群体控制、通用性系统设计、智能化以及人机协作等。 在此基础上,进一步指出蜂群作戰技术发展存在的不足和难点,为国内下一步蜂群作战发展提供思路。
关键词:蜂群作战;群体控制;通用性;智能化;人机协作; 无人机
中图分类号:TJ760;V279 文献标识码: A 文章编号:1673-5048(2022)01-0052-06[SQ0]
0 引 言
近几年来,无人作战系统在战争中的地位愈发突显。 2020年,纳卡冲突中阿塞拜疆频繁利用无人机空袭亚美尼亚地面武装力量,导致亚方大量装甲车辆和火炮遭到袭击,损失惨重。 在近期爆发的巴以冲突中,巴勒斯坦利用进口无人机对以色列多个重要设施进行了轰炸。 从上述无人作战系统在战场上的使用情况来看,无人作战系统的研究已经逐渐从理论走向了战场,但并没有涉及到无人蜂群作战的概念,仅是无人作战的初级阶段。 虽然只是初级阶段,但从作战效果来看,已显现了无人作战低成本、打击成效显著的特点,证明了无人作战系统在战场上发挥的作用不可小觑。 而作为无人作战的高级形式——无人蜂群作战,必然会有更大的战争破坏力。 目前,世界各国军事力量不断加大对无人蜂群作战的研究,特别是美军在无人蜂群作战上的研究项目众多、成果显著。 文献[1-5]介绍了美军的多个无人蜂群作战研究项目,包括“小精灵”、“低成本无人蜂群技术(LOCUST)”等;文献[2]介绍了欧洲的多异构无人机实时协同和控制项目,以及俄罗斯下一代重点发展的与有人战机协同配合的无人机蜂群作战项目。
不难想象,无人蜂群作战必将很大程度上改变未来的战争形式,可以说未来谁拥有最先进的蜂群技术,谁就能占据战场主动权。
1 外军蜂群作战研究进展
1.1 追求蜂群群体协作控制和通用性架构
作为蜂群概念的提出者,美国在蜂群作战上已经取得了诸多成果,提出了多个蜂群作战演示概念。 2021年3月,美国国防部将其最新研发完成的无人系统技术移交给了陆、海、空三军的相关部门,以支持后续的发展计划。 而该无人系统实质上就是美国雷神公司研发的“土狼”无人机的Block 3版本以及相关的发射装置,隶属美军的LOCUST项目。 该项目的核心在于研发了抗干扰通信数据链路以及能够使无人机成群自主运行的软件系统。
美国空军正在实施的“金帐汗国(Golden Horde)”网络弹药项目计划在库存武器系统上增加无线数据链路和协作能力,以展示武器网络化协同功能的有效性,如图1所示。 网络化协同武器相互之间能够共享数据、交互,并能协同执行任务。 武器使用共享数据来改进整个武器群的信息,从而提高整个群体信息的有效性。 当每种武器探测到同一目标的位置数据时,综合这些信息数据则可以减小目标位置的误差,从而实现更精确的火力打击。 “金帐汗国”计划使用“战术召唤”的协作自治方法,核心在于当群体满足某些预设条件时会启用(或禁用)的既定协作行为。 该计划包含一个战术集合想定,在执行任务之前,战术想定会根据任务的不同选择相应的武器。 计划没有融入人工智能或机器学习来实现目标打击,仅从设定的战术集中选择方案,整个过程不会违反既定的交战规则,附带伤害可控。 俄罗斯近几年也逐渐加大无人作战的研究,在蜂群作战上提出了Flock-93蜂群概念,如图2所示。 Flock-
93蜂群概念中的无人机具有垂直起降(VTOL)能力,续
航能达到150 km。 Flock-93蜂群无人机计划装载2.5 kg载荷的炸药;由“单眼视觉系统”实现侦察定位,目标是卡车和轻型装甲车;采用分布式架构设计,如果领航机被敌方火力摧毁或因某种原因丢失,那么其功能就会转移到另一架无人机上重新配置。 设计“蜂群”由有人飞行器或地面控制站来指挥。
近期,英国宣布由国防科技实验室(DSTL)主导的多无人机轻量作业(Many Drones Make Light Work)项目完成结题,并于2020年1月28日公布了其大规模无人蜂群竞赛的验证飞行成果。 英国国防部通过“加速推进国防和安全(DASA)”计划为该项目提供了340万美元的经费资助。 DSTL实验室称,参加演示的共有220架具有不同作战能力的5种异构固定翼无人机,共携带6种载荷,实现了态势感知、医疗援助、后勤补给、爆炸物检测与处置以及电子干扰与欺骗等功能演示。 参加演示的蓝熊系统公司(Blue Bear Systems)采用移动指挥与控制系统(MCCS),由3名操作员管理着整个无人蜂群,协同处理超视觉飞行的无人蜂群异构载荷分析任务。 多无人机轻量作业项目于2016年10月启动,目标是实现由单操作员管理20架无人机,以紧耦合的方式在对抗环境中实现协同作战,实现全频谱(可见光、红外及电磁谱段)的态势感知;以竞赛的方式聚焦系统架构设计、无人平台与传感器、载荷系统、任务规划管理、组网通信、系统弹性与生存能力、军事任务与评估等方面的能力。 无人蜂群采用开放式体系构架,可执行电子干扰/电子对抗、电磁态势感知、情报监视侦察和通信中继等任务。
多无人机轻量作业项目的目标作战概念包括:(1)陆地战场支援。 在复杂战场环境下,采用EO/IR及电磁传感器进行广域侦察搜索及监视,实现群体智能的涌现性。 (2)海上作战支援。 在沿海区域战场对水面和陆地威胁进行侦察搜索,针对舰船、雷达等目标实现跨域态势感知。 (3)空中机动支援。 利用无人蜂群平台对敌空中威胁进行抵近探测和干扰,在复杂环境中搜索隐蔽的陆基威胁目标。 英国皇家空军与意大利国防承包商在空中机动支援概念研究上成功完成了一次重要的合作项目,项目演示了无人蜂群的自主飞行,蜂群中的每架无人机都携带了能够执行电子攻击的BriteCloud消耗性主动诱饵,如图3所示。 BriteCloud是一种数字式射频内存(DRFM)干扰器,该干扰器工作时,会首先检测来自敌对平台(包括飞机、舰船和地面防空系统以及来袭导弹上的主动雷达制导系统)发射的雷达脉冲,然后通过模拟这些信号来制造虚假目标。 BriteCloud可以从任何标准的55 mm诱饵发射器上发射,最初在台风战斗机上对该诱饵进行了测试,未来将会整合到F-35B联合打击战斗机上。 与单一飞机平台不同,新BriteClouds中的诱饵程序包经过编程和导航处理,多个BriteClouds可以协同工作以造成最大的破坏影响力。 将干扰器放置在无人机中可以在大范围内实现最佳的覆盖干扰,且整个无人集群能够快速进行区域转移,以达到快速响应的目的,灵活性极高。 Brite-Cloud还可以在更长的时间内执行多次电子攻击。 这种可消耗、可回收、再利用的功能设计,使其可以低成本执行高风险任务。
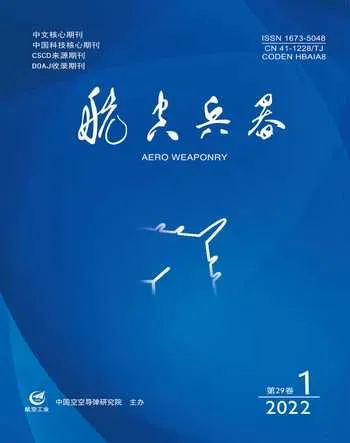
此外,英国陆军正在使用小型无人飞行器配合其执行任务,如图4所示。 小型无人机可以用标准的40 mm手榴弹发射器发射,小巧的四旋翼无人机可配备各种有效载荷,包括光学摄像机以及小型高爆弹和穿甲弹头,这些无人机在发射后可以成群飞行執行任务。
土耳其国防工业总统办公室启动了Swarm无人机技术开发和演示计划,目的是开发蜂群算法和软件,以配备至具有成群能力的无人平台。 土耳其安卡拉(ANKARA)开发的基于人工智能的MilSoft群载无人机软件,可以装载在从空中、陆上和海上平台发射的无人机群中,所获得的图像信息可以传输至其中央指挥系统。 无人机平台的飞行时间超过0.5 h,有效载荷容量为1 kg。 通过使用MilSoft公司的群控制软件,5架人工智能无人机协同完成了侦察、探测、识别、搜索、救援、跟踪等多项任务。 尽管目前只使用了5架无人机,但在受控环境中,最多可以达到25架,MilSoft的目标是控制多达50架无人机。 无人机之间的通信也由MilSoft技术支持,通信距离可达500 m,此外还有10 km的网络数据传输解决方案。
西班牙国防部的RAPAZ计划将用于开发自主飞行的无人蜂群系统软件,以执行不同类型的任务,包含情报侦察、搜索救援,以及作为游荡弹药执行对地目标打击任务,系统配备了最先进的基于人工智能的远程智能安全系统。 蜂群可由单个操作员操作,其任务行为将是自主的,并且可以适应不同的任务需求。 该平台还能够与地面步兵战车配合使用。
2021年1月,新德里军营举行的建军节阅兵式上,印度首次展示了一种进攻性蜂群无人机系统,模拟击落一系列目标,包括无人机“母机”释放的“子”无人机对坦克、恐怖营地、直升机停机坪和燃料库发起自杀攻击。 无人机系统包括75架自动识别和击落目标的“神风特攻队”任务无人机,中小型无人机在没有任何地面人工干预的情况下,执行了一系列AI支持的模拟进攻和战斗支持行动,包括自杀式攻击、盘旋和空投任务,为前线部队投放药品和物资。
1.2 积极融入人工智能等高新技术
美军的“集群使能攻击技术(OFFSET)”项目目前已经完成了4次总体测试。 在第3次测试中,共动用了250多个无人机系统和/或无人地面系统(UGS)在复杂的城市环境中完成各种任务,主要测试了地面、空中不同蜂群的协作。 测试根据二维和三维态势,实现空地蜂群基于态势感知自主行动,同步整合仿真环境和实际环境进行测试。 在第4次测试中,以城市作战为试验背景,划分多个互动阶段,测试了无人车辆、固定翼无人机、多旋翼无人机自主定位可疑目标及保卫多个模拟目标的能力。
土耳其基于AI的MilSoft集群控制软件能使成群的无人机接受来自直升机的指挥命令执行正面攻击任务,并为其他友邻平台提供作战支持。 无人机能够在任务开始到结束的过程中自主飞行。 近期,MilSoft群载无人机软件通过使用包含AI和机器学习技术的独特图像处理算法为土耳其武装部队(TSK)人员额外提供了对移动目标的自动检测识别能力,并且实现了高成功率和高精度的目标识别。
2021年4月,英国蓝熊系统公司推出了用于无人机蜂群和超视距(BVLOS)作战的“平视”(Heads-Up)型增强现实(AR)系统。 该系统可以让操作员戴着AR眼镜查看蜂群中所有无人机的位置、运行状况和其他参数,或查看单个无人机的详细系统状态。 该系统有助于多架无人机返回单个着陆区等任务,接下来还将增加其他外部数据源(如ADSB),以增强态势感知能力。
以色列军队也一直在开发基于人工智能的蜂群战术,多个国外最新报道显示以色列实现首次将基于人工智能引导的无人蜂群投入实战。 这些蜂群无人机可以定位、识别和攻击哈马斯武装力量,无人机蜂群在街上游荡,随时发现和跟踪目标,并进行精确打击。 无人机可在3 600 m高度飞行,且可在大风、大雨等恶劣天气下正常飞行,续航时间为75 min,作战半径10 km,可挂载3 kg弹药。 无人机的人工智能系统可以引导指挥无人机对目标可能所在的街区进行搜索打击,同时还可以引导附近的迫击炮对目标进行打击。 在2021年的以哈冲突中,人工智能引导的无人机蜂群在边境地区,摧毁了数十个目标。 以色列现正在每一个旅级单位建立一个人工智能无人机蜂群连,可独立快速对复杂地区进行搜索跟踪、评估和进行打击等任务。
1.3 推进人机协作技术
作为美军F-35“忠诚僚机”的XQ-58A“女武神”隐身无人机最近完成了发射小型无人机的测试工作。 “女武神”不仅能够发射多架小型无人机,且多个无人机能够成群执行多样化军事任务。
2021年4月下旬,美国海军组织了一次包括美国海军研究实验室“超级蜂群”项目设备(该项目旨在研究如何利用和防御无人蜂群)等在内的7种无人系统,以及多达10艘有人驾驶舰艇、5架有人战机参加的“无人系统综合作战问题-21”大规模有人与无人系统协同作战演练。 演习主要评估海上无人系统开展情报、侦察、导弹射击等任务能力,以及如何与有人系统协同作战等。
俄罗斯航天部门最新提出“闪电”蜂群系统概念,机身设计基于小型巡航导弹,具有细长的机身、折叠翼和喷气发动机。 该系统的无人蜂群可由各类军事飞机发射,俄罗斯最先进的苏-57战机最多可携带8架,采用隐形技术减少雷达和红外信号,可在复杂多变的环境中,通过相互协作和任务自动分配来扩大行动效率,还可通过增加或减少蜂群数量来重新设置任务。
2 外军蜂群作战发展分析
总结来看,外军蜂群作战近几年或者说未来若干年主要以蜂群群体控制、加快通用/开放性体系架构、提高无人蜂群自主作战能力、研发人机协作技术为核心发展方向。
2.1 实现蜂群群体控制提高战斗力
从最近几次的战争来看,无人系统越早部署就能越早比对方掌握战场的主动权。 再者,无人系统也可以在实战中不断摸索和完善相关关键技术。
群体控制技术是实现蜂群作战的关键和前提。 从外军蜂群作战发展情况来看,美国、英国、土耳其以及西班牙等多个国家把蜂群作战的重要研究方向首先放在研发能够实现群体协作的算法和控制软件上。
蜂群的个体硬件平台门槛低,技术含量并不高,部分国家对民用无人机稍作改造就能运用到军事任务中,投入成本很低。 相对于蜂群硬件平台,蜂群作战的核心在于如何使这些数量众多的低成本军用或商用无人机个体能够融合成为一个相互协作的群体,从而实现单架无人机无法完成的复杂任务。 因此,控制软件才是蜂群尽快走向战场的关键。 美军的“土狼”无人机群自主控制软件系统已经经过了多个版本的迭代发展,成熟至已部署三军。 其他几个国家也相继初步实现了对若干架或者数十架无人机的群体控制,虽然离真正的蜂群规模还差很多,但在小范围区域已初步具备群的作战能力。
依靠群体控制软件以及内置自主算法,未来执行军事任务时,单个作战人员将能够实现对成百上千架无人机构成的群体的控制,从而指挥蜂群在复杂战场环境中执行多样化军事任务。 这在战场上将会显著提高作战效率,同时降低人员伤亡。
未来战场要想在蜂群战斗中获胜,可能将取决于谁拥有最好的蜂群自主算法和控制软件,以实现更佳的作战协作、更大规模的蜂群控制以及更快的战斗反应时间,而不仅仅是追求更好的单个硬件平台。
2.2 通用/开放性架构提高蜂群系统的互用性
美军在2042无人系统路线图中把加快无人系统通用性和开放性体系架构作为四大发展主题之一。 未来体系作战将越来越多地使用无人系统,互用性将构成充分使用无人系统技术的联合作战部队的基础。 在有人和无人系统动态混编的部队中,无人系统必须能跨越系统和领域与其他无人系统及人员进行通信、信息共享和交互协作。
美军无人系统众多,标准不一,因此,美国国防部一直在致力于消除各军种无人系统的壁垒,追求无人系统的通用化设计。 首先是无人平台通用化设计。 从近几年美国的蜂群项目研究情况来看,最典型的是低成本“土狼”无人蜂群项目,其已经能够做到依托陆、海、空等多种平台发射。 “土狼”无人机最初的设计是从美国海军的水面舰艇上发射,后又由美国空军从P-3C反潜巡逻机以及XQ-58A“女武神”隐身无人机上发射,近期美国陆军又从地面装甲车平台发射以执行地面任务。 美国陆、海、空三军都能使用该低成本无人蜂群技术达成各自所需的任务。 未来美国无人作战力量将摆脱各自为战的局面,从而实现战场力量的融合倍增,促进其战斗力大大提升。 此外,还能节省大量军费用于更进一步的深入研究。 其次是软件通用化设计,以构建弹性通信网络,建立标准的、集成的数据传输标准,扩大无人系统的作战范围。 美军着手将通用化能力融入其发展的网络化弹药计划,就是对现有弹药进行改造,从而使其具备自主协同打击能力,组成“游荡弹药”群。 未来这种通用性设计不仅能够使导弹发挥群体打击的效果,大大提升作战效能,还能使库存中的老旧弹药焕发新的生命[4]。
土耳其的MilSoft蜂群控制软件已实现在多类平台中使用。
通用性开放性架构设计将极大提高无人系统的互用性。
2.3 基于AI的蜂群可显著提高作战效率
基于AI和机器学习可开发具有高度自主能力的无人系统。 这种学习能力可改进和扩展无人蜂群系统的能力,变革战场管理和指挥控制,提高无人蜂群系统执行任务的效率和效能,增强战场作战能力。
目前,世界军事力量在发展蜂群作战系统的同时,不断融入先进的AI等技术,如视觉感知、语音、面部识别和决策工具等,蜂群将能够执行诸如空中干扰、目标识别、自主飞行、两栖攻击、近距离打击等复杂的作战行动[6-8]。 美军在新版无人系统发展路线图中明确提出将AI和机器学习作为自主性的首要支撑因素。 除美军外,其他国家也清醒认识到AI对于提升蜂群能力的巨大潜力,并已付出了大量努力,大量高新技术已经成功融入蜂群。
未来融入AI等高端技术的蜂群能利用自身的自主传感器平台、自动目标识别系统、数据分析系统等,提高无人蜂群精确打击和躲避敌人防御的有效性和敏捷性。
2.4 人机协作提高非对称作战能力
世界各国竞相发展各种无人平台的最终目标是自主地完成作战任务,作战全程不需要人為干预。 但是目前面对愈加复杂的战场环境和瞬息万变的战争进程,指望无人系统在指挥和决策中迅速做出最优决定并不现实。 鉴于人脑的思维与判断优势,在未来作战中将有人与无人平台在一定范围内混编,采用人脑指挥、机器出力的“人在回路”模式。 人机协作仍是无人系统发展的主流,其包括两项关键支撑因素:人机接口和人机编组。 人机接口是指作战人员与蜂群系统之间建立联系、交换信息的输入/输出接口,将实现更高级别的人机协助和战斗编队,以任务和编队为中心,将人类识别和判断能力与无人系统的自主技术相结合,利用多域资源来满足动态任务目标。 人机编组是对有人系统和无人系统的有效编组,编组后实现战场协同感知、协同作战,以产生不对称作战优势的作战能力。
美国和俄罗斯正在开发先进战机与无人蜂群的作战结合模式,如未来在F-35和苏-57先进战机项目研究上,两国都在计划增加发射无人机群的能力;美军也在各种场合公布了其下一代武装直升机与蜂群协同作战的概念演示,可以说美军在人蜂协同作战上走在了全球的前列。 未来战场上,无人蜂群将大量替代有人战机,并充当有人战机的僚机;有人战机将能够指挥一组甚至多组具有不同功能的小型无人机群,依靠无人蜂群可提前对复杂作战区域开展侦察任务,为指挥员提供可靠的战场情报。 此外,无人蜂群还能充当靶标消耗敌防空力量,引诱敌方探测设备工作,从而暴露位置;也可成为游荡弹药,随时对敌防空力量进行打击,保障有人驾驶战机的安全性和完成任务的效率[9-18]。
3 结 束 语
随着对蜂群作战研究的不断深入,世界各国已经逐步认识到蜂群作战的若干关键核心。 综合来看,目前对于蜂群作战的研究仍处在起步和探索阶段,对蜂群控制上大部分还只是实现了群体的一般协作,对于蜂群所表现的群体智能上的研究还不够深入;其次,对于蜂群的控制数量也比较有限,百千架蜂群的控制技术还难以实现。 未来蜂群作战还需要进行更多大量深入的研究。
参考文献:
[1] 许彪,张宇,王超. 美军无人系统蜂群技术发展现状与趋势分析[J]. 飞航导弹,2018(3):36-39.
Xu Biao,Zhang Yu,Wang Chao. Development Status and Trend Analysis of American Unmanned System Bee Colony Technology[J]. Aerodynamic Missile Journal,2018(3):36-39. (in Chinese)
[2] 杨中英,王毓龙,赖传龙. 无人机蜂群作战发展现状及趋势研究[J]. 飞航导弹,2019(5):34-38.
Yang Zhongying,Wang Yulong,Lai Chuanlong. Research on Development Status and Trend of UAV Swarm Warfare[J]. Aerodynamic Missile Journal,2019(5):34-38. (in Chinese)
[3] 焦士俊,王冰切,刘剑豪,等. 国内外无人机蜂群研究现状综述[J]. 航天电子对抗,2019,35(1):61-64.
Jiao Shijun,Wang Bingqie,Liu Jianhao,et al. Review of Drone Swarm Research at Home and Abroad[J]. Aerospace Electronic Warfare,2019,35(1):61-64. (in Chinese)
[4] 董宇,高敏,张悦,等. 美军蜂群无人机研究进展及发展趋势[J]. 飞航导弹,2020(9):37-42.
Dong Yu,Gao Min,Zhang Yue,et al. Research Progress and Development Trend of American Bee Swarm UAV [J]. Aerodynamic Missile Journal,2020(9):37-42. (in Chinese)
[5] 岳凡,胥银华,郭泽民. 美军小型低成本无人蜂群发展运用及对策[J]. 国防科技,2021,42(1):27-31.
Yue Fan,Xu Yinhua,Guo Zemin. The US Military’s Development and Application of Small and Low-Cost Unmanned Swarms and Countermeasures[J]. Defense Technology Review,2021,42(1):27-31. (in Chinese)
[6] 刘献伟,陈虎林,李飞,等. 一网打尽:无人集群时代的新攻防[J]. 航空兵器,2019,26(1):70-75.
Liu Xianwei,Chen Hulin,Li Fei,et al. Catch All in Nets:New Attack and Defense in the Age of Unmanned Cluster[J]. Aero Weaponry,2019,26(1):70-75. (in Chinese)
[7] 贾高伟,侯中喜. 美军无人机集群项目发展[J]. 国防科技,2017,38(4):53-56.
Jia Gaowei,Hou Zhongxi. The Analysis and Enlightenment about the UAV Swarming Project of the United States Military[J]. Defense Technology Review,2017,38(4):53-56. (in Chinese)
[8] 赵鸿燕. 美国面向未来战争的导弹协同作战概念发展研究[J]. 航空兵器,2019,26(4):1-9.
Zhao Hongyan. Research on the Concept Development of the United States Missile Cooperative Operations for Future War[J]. Aero Weaponry,2019,26(4):1-9. (in Chinese)
[9] 束坤,李培,李迪,等. 无人机集群自组织协同抵近干扰技术[J]. 现代雷达,2020,42(10):22-25.
Shu Kun,Li Pei,Li Di,et al. Technology of Self-Organized Coope-rative Forward Electronic Jamming by Swarm UAVs[J]. Modern Radar,2020,42(10):22-25. (in Chinese)
[10] 王肖飛,李冬,陆巍巍,等. 无人机集群战例分析与作战研究[J]. 舰船电子工程,2020,40(11):16-19.
Wang Xiaofei,Li Dong,Lu Weiwei,et al. Analysis of Example of Unmanned Vehicle Swarms and Research of Operation[J]. Ship Electronic Engineering,2020,40(11):16-19. (in Chinese)
[11] 刘海江,李宪港,梁铭. 加速无人化装备技术发展的思考[J]. 国防科技,2020,41(6):28-32.
Liu Haijiang,Li Xiangang,Liang Ming. A Thinking on Accelerating the Development of Unmanned Weapon Systems and Technolo-gies[J]. Defense Technology Review,2020,41(6):28-32. (in Chinese)
[12] 张旭东,吴利荣,肖和业,等. 由美军作战概念出发的有人机/无人机智能协同作战解析[J]. 无人系统技术,2020,3(4):91-96.
Zhang Xudong,Wu Lirong,Xiao Heye,et al. Analysis on Concept of Intelligent Cooperative Combat of Manned/Unmanned Aerial Vehicle Evolving from the Combat Concept of American[J]. Unmanned Systems Technology,2020,3(4):91-96. (in Chinese)
[13] 张邦楚,廖剑,匡宇,等. 美国无人机集群作战的研究现状与发展趋势[J]. 航空兵器,2020,27(6):7-12.
Zhang Bangchu,Liao Jian,Kuang Yu,et al. Research Status and Development Trend of the United States UAV Swarm Battlefield[J]. Aero Weaponry,2020,27(6):7-12. (in Chinese)
[14] 罗雪丰,雷咏春,范俊. 国外有人直升机与无人机协同研究综述[J]. 直升机技术,2018(3):61-67.
Luo Xuefeng,Lei Yongchun,Fan Jun. Research Review of Fo-reign Manned Helicopter and Unmanned Aerial Vehicle Cooperation[J]. Helicopter Technique,2018(3):61-67. (in Chinese)
[15] 张煌,贾珍珍. 无人作战的人机融合:挑战与出路[J]. 国防科技,2020,41(6):105-109.
Zhang Huang,Jia Zhenzhen. Human-Machine Integration in Unmanned Combat:Challenges and Solutions[J]. Defense Technology Review,2020,41(6):105-109. (in Chinese)
[16] 李鹏举,毛鹏军,耿乾,等. 无人机集群技术研究现状与趋势[J]. 航空兵器,2020,27(4):25-32.
Li Pengju,Mao Pengjun,Geng Qian,et al. Research Status and Trend of UAV Swarm Technology[J]. Aero Weaponry,2020,27(4):25-32. (in Chinese)
[17] 杜梓冰,张立丰,陈敬志,等. 有人/无人机协同作战演示验证试飞关键技术[J]. 航空兵器,2019,26(4):75-81.
Du Zibing,Zhang Lifeng,Chen Jingzhi,et al. Critical Technologies of Demonstration Flight Test of Cooperative Operation for Manned/Unmanned Aerial Vehicles[J]. Aero Weaponry,2019,26(4):75-81. (in Chinese)
[18] 申超,李磊,吴洋,等. 美国空中有人/无人自主协同作战能力发展研究[J]. 战术导弹技术,2018(1):16-21.
Shen Chao,Li Lei,Wu Yang,et al. Research on the Capabality of the US Manned/Unmanned Autonomous Collaborative Operations[J]. Tactical Missile Technology,2018(1):16-21. (in Chinese)
Research Progress and Development Analysis of
Foreign Army Drone Swarm Operation
Gu Kang*
(PLA Army Academy of Artillery and Air Defense,Hefei 230000,China)
Abstract: The concept of drone swarm operation has been the focus of development all over the world.This paper lists the latest research progress and phased achievements in drone swarm operation abroad in recent years,and summarizes and analyzes some main development directions of drone swarm operation abroad,including group control,universal system design, intelligence and man-machine cooperation.On this basis,the shortcomings and difficulties in the development of drone swarm operation technology are further pointed out,which provides ideas for the next development of drone swarm operation in China.
Key words: swarm operation;group control;generality;intelligent;man-machine cooperation; unmanned aerial vehicle
收稿日期: 2021-06-04
作者簡介:谷康(1987-),男,安徽铜陵人,硕士研究生。
猜你喜欢
军事文摘(2022年19期)2022-10-18
现代职业教育·高职高专(2022年14期)2022-05-01
课程教育研究(2021年9期)2021-04-13
福建基础教育研究(2019年1期)2019-09-10
福建基础教育研究(2019年1期)2019-05-28
进出口经理人(2018年1期)2018-01-24
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26