
三维激光扫描进行隧道变形探测的可行性研究
2022-03-06 02:18丁鸽陈艳华燕立爽彭健
城市勘测 2022年1期
丁鸽,陈艳华,燕立爽,彭健
(1.济南市勘察测绘研究院,山东 济南 250013; 2.济南市房产测绘研究院,山东 济南 250001)
1 引 言
随着激光技术的不断发展,三维激光扫描技术的测量精度不断提高,其在变形监测、工程测量、交通现场勘测、桥梁变形监测、古建筑和文物保护、数字城市等领域的应用不断扩大。尤其在高精度变形监测领域,三维激光扫描技术可以对被扫描物体进行全方位数据采集,从而进行整体监测,有效弥补了传统变形监测手段的片面性和局限性。对获取的点云数据进行恰当的处理分析是三维激光扫描技术应用于变形监测的关键步骤,其中切片的提取、不同测站间切片的配准尤为重要。龚友平等[1]对点云数据的切片采用近似轮廓跟踪算法完成切片数据的细化处理,但此方法需对点云数据进行预处理,剔除多重轮廓的数据。唐琨[2]等提出利用中轴线上节点坐标偏移的方法进行切片提取,该方法具有一定的评定精度,但无法保证切片提取的精确性,标靶的位置和数量等观测条件设定较为严格。目前,国内外对于点云数据的处理虽进行了大量研究,但在确定可变区域的大小方面研究还比较缺乏。本文提出了一种基于三维激光扫描的隧道变形探测方法,实验说明了方法的有效性。
2 隧道变形探测方法
本文隧道变形探测方法是根据基准面与隧道内壁点云法向量及地面的关系,利用最小二乘算法和基于法向量基准面的搜索算法,确定最佳基准面,获取点云数据的切片,应用改进的ICP算法对不同测站的切片数据进行配准,再利用KNNS算法搜索不同切片之间大于临界距离的点数,并计算得出这些点所围成的最大区域,从而获得隧道可探变形区域的最小范围。
2.1 最佳基准面的确定
进行切片提取,首先要对获取的点云数据进行平面拟合,主要方法有特征值法、二维正交TLS法[3]等。本文利用最小二乘算法[4]和基于法向量最佳基准面的搜索算法确定最佳基准面,通过基准面确定用于探测变形区域的切片。
假定地面点云数据包含n个点{(xi,yi,zi):i=1,2,…,n},其中xi和yi为没有误差的自变量,zi为含有误差的因变量,拟合平面中z关于x和y的函数为:
z=f(x,y;p,q,r)=p+qx+ry
(1)
根据最小二乘原理,p,q和r的选取应使式(2)的值最小:
(2)

ax+by+cz=0
(3)
假定基准面通过坐标原点,形式如式(4):
a′x+b′y+c′z=0
(4)
利用基准面与隧道地面垂直的关系,建立如式(5)的关系式,从而确定了基准面参数的关系式。
(5)
2.2 切片的提取
(1)将仪器架设在隧道断面中心位置,对中整平,全景扫描隧道,截取部分扫描点云如图1(b)所示。

图1 扫描实验场

(6)
(4)计算点云到基准平面的距离截取所需任何位置、任何宽度(点云区域范围内)的横断面。
2.3 切片数据的配准
ICP算法[8]是通过迭代计算使两个点集的距离平方和最小而获得转换参数,三维空间R3存在PL={pl1,pl2…pln,pli∈R3}和PR={pr1,pr2…prn,pri∈R3}两组各含n个坐标点的集合,其中PL为转换点集,PR为对象点集。三维空间点集PL中各点经过三维空间变换后与点集PR中的点一一对应,其转换公式如式(7)所示。
Pri=R·Pli+T
(7)
上式中,R为三维旋转矩阵,T为平移向量。最小化距离平方和公式如式(8):
(8)
本文采用改进的ICP算法,其步骤如下:
(1)初始化三维旋转矩阵R和平移向量T。

(9)
2.4 隧道可探变形区域的确定
KNNS搜索算法[5,6]是从数据集中找出查询对象的k个最近邻点。设数据集S={xi|1≤i≤n},xi=[xi1,xi2,…,xim]。其中n为样本数,m为数据集维数,xi为给定的任意样本、度量函数为D,xi的k(k≤n)个最近邻点集合S′符合:
∀p∈S′|∀h∈S-S′:D(xi,y)≤D(xi,h)
(10)
KNNS需要计算一个查询点xi到所有其他训练样本之间的距离[7],然后对距离值排序得到k个最近邻点。为了减少搜索时间,常用的KNNS算法是从以给定查询点xi为中心、半径相对比较小的一个超球体内开始搜索,然后采用一个迭代方法,逐步扩大半径,直到超球半径超过或等于最小半径rmin为止,此时该超球至少包含k个最近邻点。其中最小半径rmin为以xi为中心、包含k个最近邻点的最小超球半径。
3 实验与结果分析
3.1 数据采集实验方案
本实验采用RIEGL Laser Measurement Systems GmbH型号的三维激光扫描仪对某隧道进行扫描,实验方案如下:
(1)为获得隧道两侧较为均匀的点云数据,将三维激光扫描仪架设在隧道中间位置,并标记特征点,对仪器进行对中整平操作。
(2)设置三维激光扫描仪的距离分辨率为 2 mm,竖直角测量范围为38°~125°,水平角度范围为222°~365°,进行全局扫描。为了避免偶然误差的影响,提高扫描精度,对隧道进行两次扫描。
(3)不搬动仪器,设置仪器的距离分辨率为 4 mm,竖直角测量范围为39°~126°,水平角度范围为153°~295°,同样对隧道进行两次扫描。至此,获得第一期不同距离分辨率下的隧道扫描点云数据。
(4)半个月后,对隧道进行第二期扫描监测,重复步骤(2)、步骤(3),获得两期隧道扫描监测数据,如表1所示。

三维激光扫描的点云数据 表1
3.2 数据处理与结果分析
根据获得的点云数据获得切片提取基准面方程:距离分辨率为 2 mm时,基准面方程为12.503x-56.57y+z=0;距离分辨率为 4 mm时,基准面方程为29.609x+32.304y+z=0。利用KNNS算法进行搜索得到点云之间的距离,通过改进的ICP算法进行不同测站的点云数据配准,然后进行搜索,结果如表2、表3所示。
同一测站不同分辨率点云数据的扫描间隙 表2

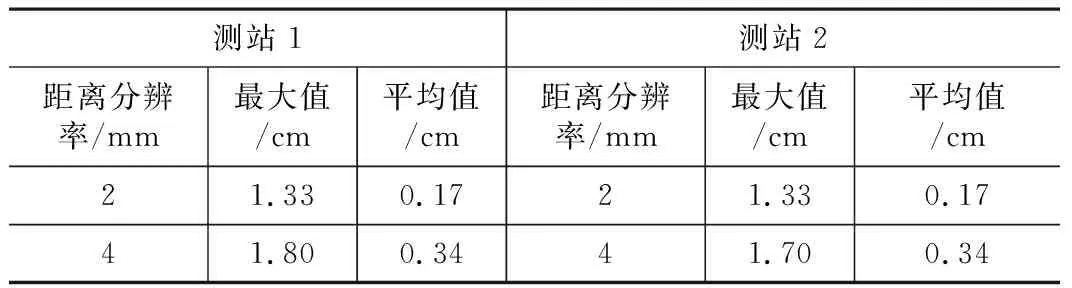
不同测站数据配准后点云数据的扫描间隙 表3
由表2可知,在仪器不发生变动的情况下,由于扫描视角及偶然误差的影响,相同条件下同一测站两次扫描存在扫描间隙。距离分辨率为 2 mm时,扫描间隙最大值为 1.33 cm;距离分辨率为 4 mm时,扫描间隙最大值为 1.80 cm。距离分辨率为 4 mm时扫描间隙的平均值为 2 mm时平均值的2倍,表明当距离分辨率较高时获得的点云数据精度较高,偶然误差较小。由表3可知,不同测站数据进行配准后,对点云数据进行搜索,由于存在配准误差,获得的扫描间隙最大值存在偶然误差。距离分辨率为 4 mm时的扫描间隙的平均值比距离分辨率为 2 mm时大 1.2 mm,表明距离分辨率设置较小时获得的点云数据精度较高,点云质量较好。
对获得的点云数据进行KNNS算法搜索获得不同点云数据距离平均值的大小,分析结果如表4、表5所示(点数越多,表示选取的监测面积越大)。其中A、B、C、D分别代表测站1距离分辨率为 2 mm和 4 mm时的4次扫描,E、F、G、H分别代表测站2距离分辨率为 2 mm和 4 mm时的四次扫描。可以看出选取监测面积越大,点云数据间的平均距离越小,说明当选择变形面积来进行变形探测时,应尽可能选择较大区域,以较好地反映变形情况。

同一分辨率不同点数的点云数据间的平均距离(单位/mm) 表4

云数据配准后不同点数的点云数据间的平均距离(单位/mm) 表5
通过以上分析,同一测站不同观测点云之间经过KNNS算法搜索获得点云数据间的最大距离值为 1.8 cm,即将 1.8 cm作为点云之间存在的偶然误差的极限值。由表3,统计经过ICP算法配准后的点云距离大于 1.8 cm的点数分别为650个、664个、193个、209个,其中前两个是距离分辨率为 2 mm,后两个是距离分辨率为 4 mm时的统计结果。
理想状况下,一定点云形成的面积最大的图形为正方形,故距离分辨率为 2 mm的情况下,664个点所形成的最大区域近似为26个点×25个点的区域,即所形成的面积为 5.0 cm×4.8 cm的区域;距离分辨率为 4 mm的情况下,209个点所形成的最大区域近似为15个点×14个点,即所形成的面积为 5.6 cm×5.2 cm。当进行三维激光扫描测量,对测量的点云数据进行变形分析时,不同距离分辨率下,选择大于上述面积的区域可以反映出变形,即点云数据可探变形区域的最小区域为:距离分辨率为2mm时为5.0cm×4.8cm,距离分辨率为 4 mm时为 5.6 cm×5.2 cm,表明利用三维激光扫描可以进行隧道的变形监测。
4 结 论
本文通过对某隧道进行扫描,对获得的点云数据进行处理分析,应用KNNS搜索算法和改进的ICP算法做相关的计算,得出进行三维激光扫描观测时,距离分辨率越高,获得的点云数据精度越高,数据处理中可以较好地削弱偶然误差的影响。对点云数据进行进一步比较分析,得到三维激光扫描的可探性变形区域,即在进行变形分析应该选取的最小区域,这对后续三维激光扫描应用于隧道变形监测具有一定的指导意义。
猜你喜欢
测绘地理信息(2022年2期)2022-04-02
中国化工贸易·中旬刊(2020年5期)2020-11-06
导航定位与授时(2020年4期)2020-07-29
科学与财富(2020年15期)2020-07-04
移动通信(2020年4期)2020-05-07
全球定位系统(2020年1期)2020-03-31
价值工程(2019年30期)2019-12-02
科技创新与应用(2019年24期)2019-10-24
移动通信(2019年4期)2019-06-25
科技创新导报(2019年6期)2019-06-11
