俯仰式臂架起重机变幅力的参数化计算
2022-03-06 12:48范开英朱天恩沈兰华
建筑机械化 2022年2期
范开英,朱天恩,沈兰华
(山东丰汇设备技术有限公司,山东 济南 250200)
俯仰式臂架起重机的变幅机构是起重机主要执行机构之一,是起重机工作幅度调节和起重臂俯仰的动力机构。变幅机构的工作载荷与起升机构不同,起升机构载荷受起重量的控制,在一个工作循环中基本不会发生变化;变幅机构载荷受变幅阻力矩控制,在工作循环内的幅度变化时,会随着起重力矩的变化而变化。
臂架式起重机正常工作时的变幅阻力(变幅滑轮组拉力)一般以变幅机构和回转机构同时动作时的工况进行计算[1]。向内变幅时起升载荷应考虑起升动载荷影响,回转动作时应考虑起升载荷向外偏摆,按照最不利的载荷工况进行组合。
为参数化求解变幅力,先建立俯仰式臂架起重机受力模型,通过力臂法或三角函数法进行求解。力臂法需求解变幅阻力矩,而三角函数法通过竖直载荷和水平载荷形成的合力多边形求解[2]。
1 力臂法求解
图1为俯仰式臂架起重机变幅机构计算简图。
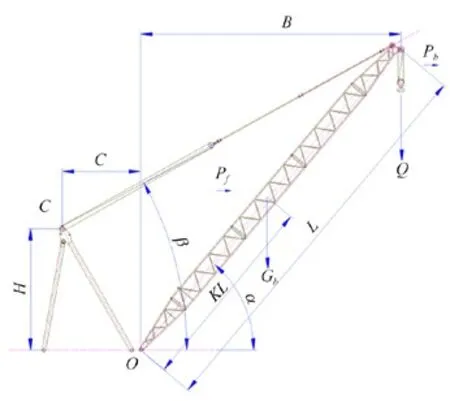
图1 变幅机构计算示意图
变幅力的计算分为起升变幅工况和起升回转工况。在回转平面内,变幅钢丝绳为铰接结构,且不与主结构构成受力三角形,因此计算时只能考虑变幅平面内的载荷。
设变幅钢丝绳、滑轮组及起重臂换算的头部积重为Gt,Gb为起重臂自重,则变幅阻力矩中的竖向载荷为
FV=φ1Gt+φ2Q
设偏摆载荷为Pb,风载荷为Pf,水平偏移角度为θ,则变幅阻力矩的水平载荷为
FH=Pb+0.5Pf=Qtanθ+0.5P0sin2α
由图1 所示的几何关系,可求得变幅钢丝绳和水平面夹角β与起重机工作幅度的关系为

令k=tanβ,则变幅绳的解析方程为
kx-y+H+kC=0
起重臂绕根部销轴O进行旋转,从固定铰点O到变幅驱动钢丝绳的距离为

起重臂载荷旋转力矩与变幅阻力矩相平衡,由此求出变幅力为

2 三角函数法求解
当起重臂载荷明确后,考虑自重冲击系数和起升动载系数,可根据力学模型进行计算起重臂轴向力FQ和分项载荷。起重臂轴向力、变幅力和起重臂竖向载荷在变幅平面内构成力学三角平衡体系。令m=tanα变幅力与竖向载荷的关系为
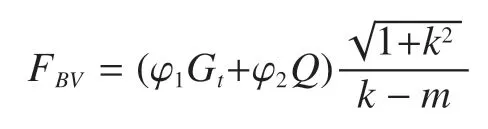
如力臂法求解过程,根据力学三角形合力平衡的原则,变幅力在水平方向分力与起重臂头部折算的水平力平衡,变幅力与水平载荷的关系为
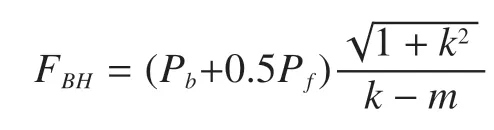
由幅度B求解出变幅绳角度β后,变幅力与工作幅度的解析表达式

其中

代入水平载荷和竖直载荷计算,则上述变幅力计算公式简化为

经校核,力臂法和三角函数法求解结果是相同的,设计人员可根据习惯选择。
3 人字架设计
当起重机的性能参数确认时,起重臂的长度和起升载荷的大小通常都是确定的,变幅力的大小不能通过起重力矩曲线调整,只能通过人字架设计调整。通过上述解析过程可知,变幅力可以通过人字架上铰点C 的位置进行调整。
人字架的设计重点考虑整机安装高度和变幅力控制,结合自身结构受力兼顾起重臂受力选择人字架铰点位置。以某QTZ2000 塔机为例,起重力矩确定后,以人字架高度为变量,分别计算最大起重力矩工况和最远端满载力矩工况下的变幅载荷,得出结果如图2 所示。

图2 变幅力与人字架高度关系图
人字架高度越高,变幅力越小,在安装条件允许的前提下,适当提高人字架高度,有利于减小变幅机构,提升起重机的综合效益。
安装高度限制了人字架高度,人字架铰点水平位置C根据变幅拉力角[3]进行控制,以最大工作幅度进行考虑设计,
起重臂最大幅度正常工作时,起重臂最小扳起角度α控制在15°~20°之间,变幅绳角度ρmin控制在-5°~5°之间。
从图3 可以看出,人字架铰点水平位置的移动对变幅力影响不大,特别是远端满载工况,变幅力几乎不变化。当机台机构布置合适后,可根据结构位置设计人字架铰点水平位置,与机台垂直,或小幅度后仰,对人字架受力有益。
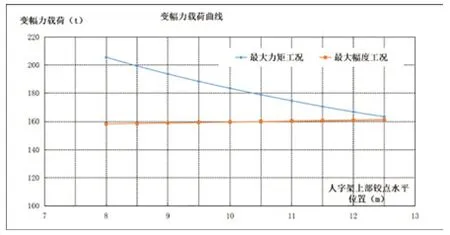
图3 变幅力与人字架铰点水平位置关系图
4 变幅力过程控制
俯仰式臂架起重机变幅机构与起升机构不同:在一次起升作业循环中,起升或者下降的过程中,起升载荷为固定值;在幅度变化时,变幅载荷理论上随着起重力矩的变化,变幅阻力矩也发生变化,臂架结构的变幅力臂也在发生变化,因此变幅力随着工作幅度的变化而变化。通过力臂法和三角函数法解析公式进行参数化求解,分析过程受力状态。
在没有起升重物的工况下,变幅机构仍需扳起起重臂的自重载荷,远端工况仍有一定比例的变幅力;在某些安装扳起工况,起重臂从负角度的位置向上扳起,变幅力可能会超过工作状态,需要单独校核。
从图4 可知,起升载荷为定值时,工作幅度减小,变幅力近似线性下降。空载工况时,变幅力并不为零。俯仰式臂架起重机为减小非工作状态下的风载影响,通常停机在最大幅度值65%~80%的幅度范围内,此时变幅力约为满载工况下的20%~25%,在变幅机构工作级别设计时要特别注意。

图4 单工作循环的变幅力
变幅力的实际控制根据起升特性曲线进行校核。计算各幅度满载工况下的变幅力,选取最大值设计变幅机构。计算结果如图5 所示。
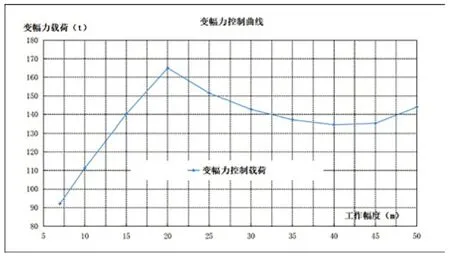
图5 各幅度最大起升力矩时的变幅力
由图5 可知,在起吊最大起重力矩对应的起升载荷时,各幅度的变幅力最大值并不相同,也不是随着幅度的增大而减小。图示中有两处极值点,第一处为最大起重力矩处,第二处为最远端起升载荷处。本示例起重臂长度设计值合理,最远端工况起重臂最小扳起角度适中,因此远端变幅力与最大起重力矩工况基本相同。在俯仰式臂架起重机设计时,一定要考虑这两种极值工况。
5 结论
1)参数化求解过程中,要建立各参数与幅度变量之间的关系,通过几何关系和函数关系建立联动解析表达式,多种计算方法的使用会对设计思路起到较好的验证作用。
2)变幅力控制与主结构形式和载荷参数有关,其中人字架的高度是参数调整的优选方案,设计者选择合理的受力模型优化结构,但同时要考虑安装、制造等综合因素。
3)俯仰式臂架起重机变幅机构是始终带载的,停机时间基本处于L2 载荷状态级别,正常工作会更高,在通过载荷图谱进行工作级别校验时需要特别注意。
4)变幅机构的设计实际控制需要根据起升特性曲线进行校核,初设时可选择典型工况进行计算,验证时可通过参数化求解验算各工况是否在满足要求。本文的参数化求解方法可为起重机设计者提供指导。
猜你喜欢
中国设备工程(2022年20期)2022-11-02
农业装备与车辆工程(2022年4期)2022-10-31
装备制造技术(2022年2期)2022-06-04
农业装备与车辆工程(2021年10期)2021-11-03
农业装备与车辆工程(2021年2期)2021-02-27
科技视界(2020年24期)2020-07-12
北京航空航天大学学报(2019年8期)2019-09-10
专用汽车(2016年7期)2016-11-23
中国高新技术企业(2016年4期)2016-11-19