
车载三维激光扫描技术在道路竣工测量中的应用
2022-03-11 13:07熊剑飞王扉林宇辉卢其栋
河南科技 2022年1期
熊剑飞 王 扉 林宇辉 卢其栋




摘 要:介绍了车载三维激光扫描技术在道路工程竣工测量中的内外业处理流程,提出了采用标靶点校正的方法以提高车载扫描成果精度,通过生产实例对该技术进行验证和应用。试验结果表明,利用标靶点校正的车载扫描成果能满足道路竣工测量的精度要求,同时表明该作业方法大大提高外业作业生产效率。
关键词:车载三维激光扫描;竣工测量;标靶点;点云校正
中图分类号:P225 文献标志码:A 文章编号:1003-5168(2022)1-0029-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2022.01.006
Application of Vehicle Borne 3D Laser Scanning Technology in Road Completion Survey
XIONG Jianfei1 WANG Fei2 LIN Yuhui2 LU Qidong1
(1.SGIDI Engineering Consulting (Group)Co.,Ltd.,Shanghai 200093,China;2.Guangdong Shunde Central Urban Investment Development Co.,Ltd.,Foshan 528000,China)
Abstract: This paper introduces the processing flow of on-board 3D laser scanning technology in road engineering completion survey, puts forward the method of target point correction to improve the accuracy of on-board scanning results, and verifies and applies the technology through production examples.The experimental results show that the vehicle scanning results of target point correction can meet the accuracy requirements of road completion survey, and this operation method greatly improves the production efficiency of field operation.
Keywords:vehicle 3D laser scanning;completion survey;target point;point cloud correction
0 引言
为满足城市升级、促进区域经济发展,以及居民出行的需要,提升城市路网功能已迫在眉睫,国内各大城市掀起了新一轮道路提升改造工程,以提高城市内主干道道路通行能力。
道路改造前后均应对其现状进行测绘。传统测量模式主要依靠人工进行外业数据采集,改造道路多为城市核心路网,交通流量大,为保证测量人员的安全,采集时须申请临时交通管制,极易导致主干道交通堵塞;传统模式还存在外业工作量大、数据采集量少、效率低、成本高、成果易错漏等缺点,因此,亟须引入测绘新技术提高测绘效率。
车载三维激光扫描系统集成多传感器和多源数据,可实现对道路全方位信息的快速、自动获取,具有扫描速度快、数据信息量大、精度高、采集过程安全简单、节省人力等优点,该项技术能极大提高外业生产效率,有效降低生产成本。数据经处理后可以获得道路实景三维数据,实现道路各项信息的全面提取[1],因此车载三维扫描系统逐渐被应用于公路测量的验收阶段。
1 车载三维激光扫描测量
车载三维扫描系统(见图1)是多种测量技术和传感器的集成,包含三维激光扫描仪、定姿定位态设备(POS系统)、GNSS接收机、全景摄像仪等。系统运行过程中POS系统及GNSS接收机记录扫描过程中车辆的位置及姿态,激光扫描头及全景相机同步获取三维点云及全景影像。点云及影像经一系列处理后,形成具有绝对定位坐标的彩色整体点云,通过点云提取道路的纵横断面及中线信息。同步记录的全景影像具有对道路现状彩色信息进行全方位、多次、多角度查看的功能,有利于地物的判别与绘制[2]。
2 技术流程
移动三维激光扫描技术流程主要分为测量准备、数据采集和数据处理三部分。
2.1 测量准备
测量准备主要包括基站選址、路线规划。在道路工程的中间区域选择视野开阔、周边无遮挡的区域架设测量基站;熟悉测区的交通状况和路线走向,选择合适的时段规划合理的路线。
2.2 数据采集
数据采集前,将车载系统静置5~10 min,使惯导系统姿态初始化,结束时也要静置。初始化后,车载系统采用20 km/h进行定速巡航。在采集过程中,若遇较长时间停车,可暂停扫描,在车子启动前开启扫描,尽量减少停车过程的数据冗余。遭遇GPS信号失锁路段,应尽快通过,减小点云精度的损失。
测量基站在车载设备启动前开机,全程同步观测。同步观测数据用于对车载GPS采集的三维坐标进行后差分,以提高最终三维点云成果的坐标精度。
2.3 数据处理
数据处理主要包括数据预处理和后处理。
2.3.1 数据预处理。扫描后点云数据预处理主要包括POS位置解算、点云融合解算。
①POS解算。定姿定位系统(Position and Orientation System,POS)解算主要是用基站数据、车载移动站GPS数据及惯性导航系统(Inertial Navigation System,INS)数据组合解算,并输出高精度的轨迹数据,用于下一步将轨迹和点云数据进行融合获取高精度点云数据。
②点云融合解算。车载激光扫描系统记录了各个传感器的测量数据,将这些数据根据各个传感器的时序和位置参数进行配准与融合,还原测量目标的三维几何空间坐标和属性。
2.3.2 数据后处理。车载激光扫描数据后处理包括点云分类、特征线提取、地形图绘制及横纵断面制作等。
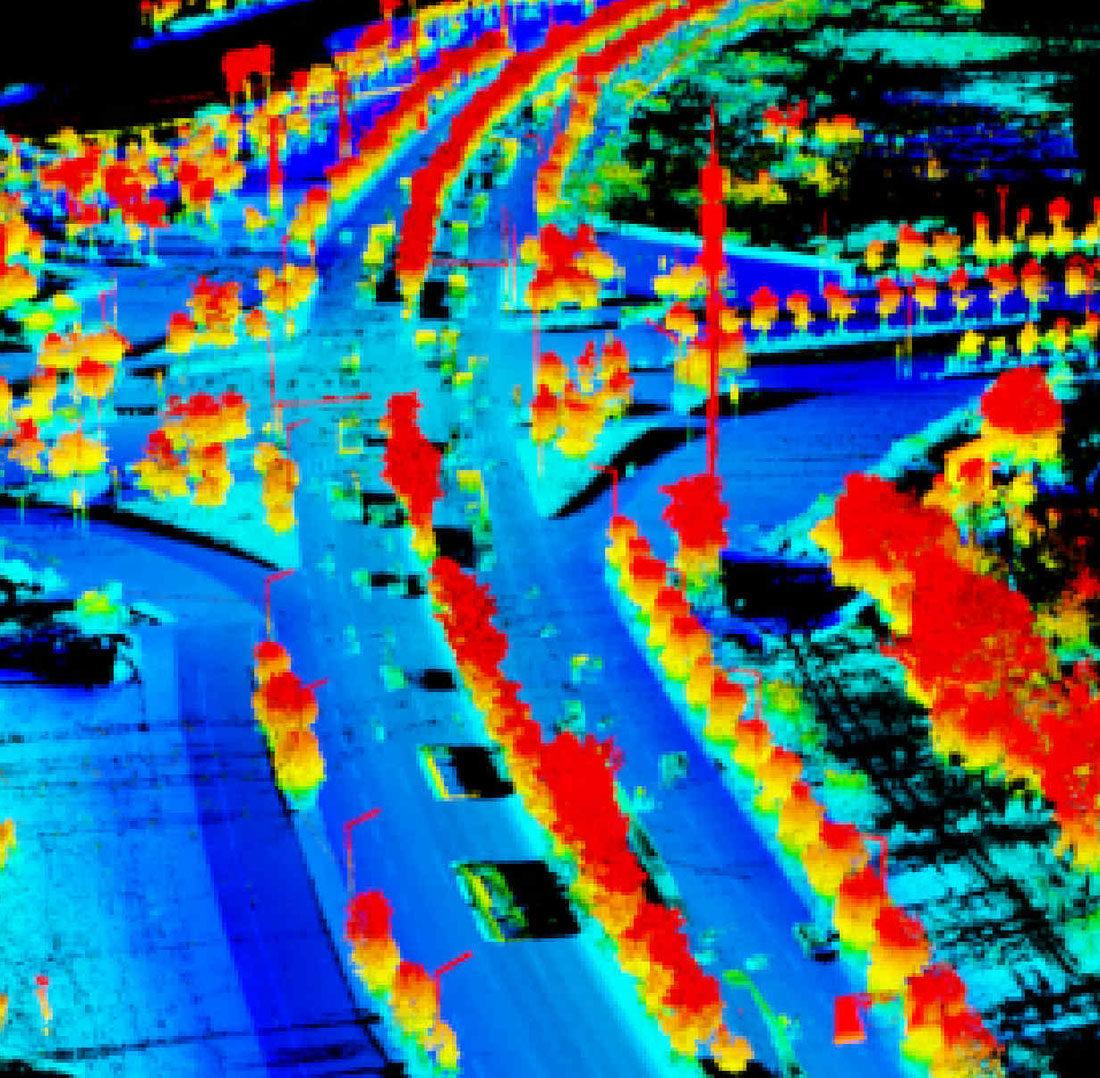
①点云分类。对抽稀后的三维激光点云数据进行点云粗分类、点云自动分类、点云精分类,准确判断地面点、非地面点及横纵断面所需的地物特征(中央绿化隔离带、行车道路边缘路肩等)[3],减少冗余数据,避免道路两旁点云数据、植被点云数据、护栏点云数据、顶部架桥等点云数据干扰测量成果,便于后期的道路横纵断面作业处理工作[4],如图2、图3所示。
②特征线提取。基于处理好的三维激光点云,利用三维激光点云地形地籍成图软件提取道路特征矢量线即道路行车道边缘线,并根据边缘线拟合道路中心线,制作纵断面。
③地形图绘制、横纵断面制作。利用三维激光地形地籍成图软件基于点云数据进行地形图绘制。按逐桩里程进行断面提取,制作横断面。
3 工程案例
佛山市某道路改造提升工程总体呈东西走向,路线全长8.14 km(其中桩号K2+150~K2+380以及桩号K3+140~K4+620为现状桥梁段),道路宽60 m,双向六车道,为佛山市主干道。
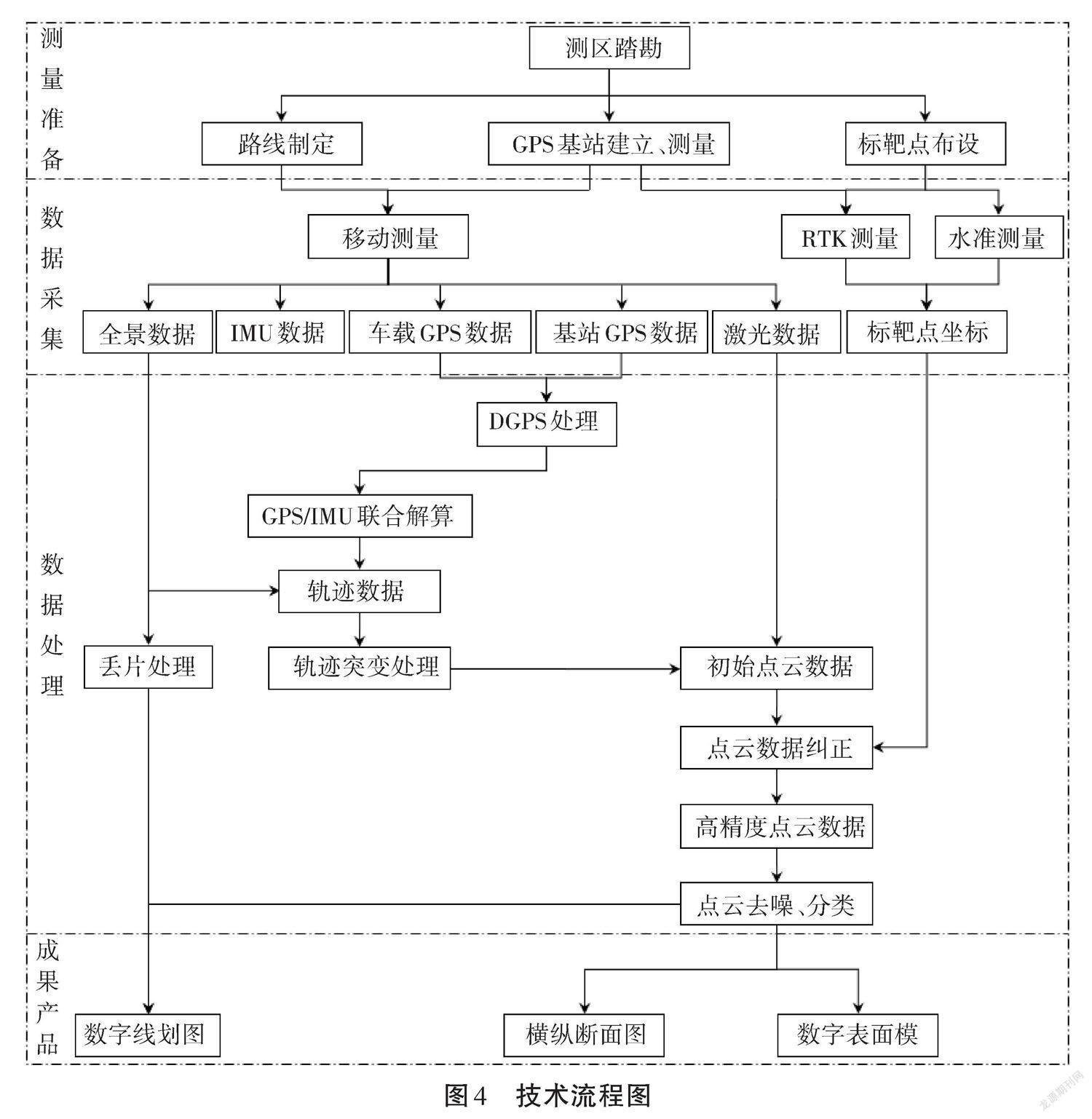
通过结合道路竣工测量工程实践,实现了车载三维激光扫描技术在道路工程竣工测量中的应用,提出采用标靶点进行点云数据纠正,提高成果精度,利用传统测量方法验证车载三维激光扫描测量的成果精度,技术流程图见图4。
本项目的车载激光三维扫描系统以汽车为移动载体,集成安装了高精度定姿定位系统、3 000万像素六镜头Ladybug5全景相机、Riegl VUX-1UAV激光扫描头、GNSS接收机及同步控制单元。
3.1 测量准备
扫描前进行标靶布设,标靶位置设置在左右行车道靠外侧较明显的位置;在十字路口路段,标靶点尽量布设在左右行车道可通视的位置;约200 m间隔布设1对或1个标靶点,标靶点喷绘白色漆,实际布设43个标靶点。标靶平面坐标采用三级GNSS进行测量,高程采用四等水准的观测方法进行测量。
本道路为双向六车道的城市主干道,中间有隔离绿化带,单幅扫描无法获取道路的所有信息,因此左右幅均须规划行驶路线。为避免因车流遮挡标靶点,选择车流量相对较少的上午10:00—12:00进行数据采集。
3.2 数据采集
按2.2中的操作流程进行采集,采集全程用时2 h,而传统测量外业采集需5~7 d,两者外业效率相差很大。
3.3 数据处理
3.3.1 点云纠正处理。按一般流程进行点云预处理,平面、高程精度可达5~10 cm,局部区域存在10 cm以上偏差,成果精度略有不足。采用标靶点对扫描点云进行纠正处理,以改进车载激光扫描系统的成果精度。
通过强度显示判别标靶点(见图5)圆心位置。导入标靶点实测坐标,选取点云中校正标靶点的同名点,对轨迹数据进行平差改正,将轨迹数据纠正(见图6),完成后重新进行点云融合处理生成纠正后的点云数据。
3.3.2 数据检查。需要检查的数据如下。
①点云密度及完整度检查。对扫描点云的密度进行检查,点云呈线性,线间距为1~3 cm。点云无缺漏,能完整包含两幅道路信息。
②點云重叠度检查。在无中央隔离带的左右幅通视路段,扫描时有重叠,两次扫描的精度差在2 cm左右;点云数据能较好地套合在同一水平线,高程离散度较小。
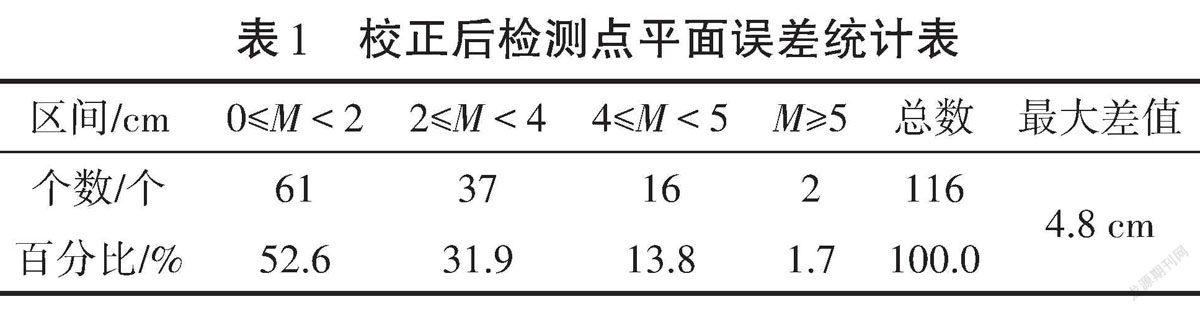
③点云精度检查。为检查点云的绝对精度,采用传统测量方式测量部分明显地物特征点73点及原有标靶控制点43点,共计116点。
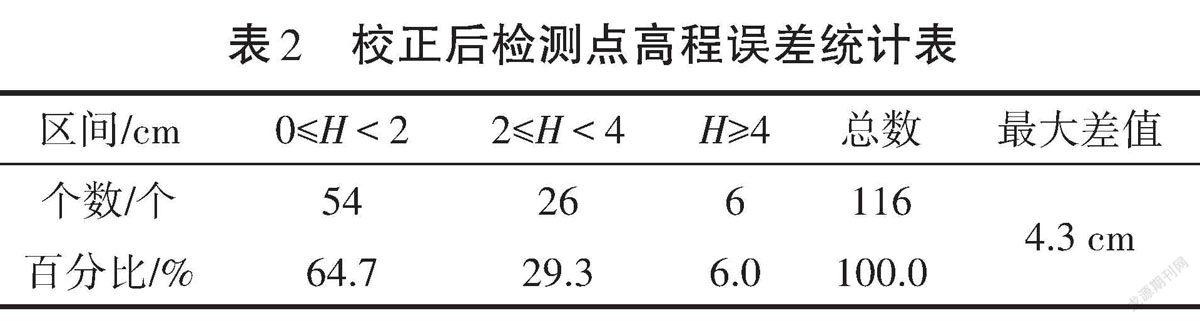
对校正后的误差进行统计,详见表1和表2。
通过表1和表2得出,经校正后的点云精度满足道路竣工验收精度要求。查看平面误差、高程误差偏大点,多位于桥梁段、陡坡等高程突变区域附近。
3.3.3 数据生产。利用校正后的点云进行道路特征线提取及纵横断面提取。
4 结语
本文采用车载三维激光扫描技术进行道路改造提升工程的竣工测量,三维扫描测量系统在未添加标靶点的情况下,平面和高程精度在5~15 cm。采用标靶点校正后,点云数据的点位中误差及高程中误差明显变小,精度明显提高,校正后的成果可以满足道路竣工测量的需求。
参考文献:
[1] 卢启生,王爱俊,张学广,等.移动三维激光扫描与全景影像技术在公路修缮设计中应用探索[J].工程勘察,2018(10):52-55.
[2] 王克峰,平世越.车载三维激光扫描系统在公路断面测量中的应用[J].测绘与空间地理信息,2018(8):195-197.
[3] 石波.车载激光点云地面滤波与道路识别方法研究[D].青岛:山东科技大学,2017.
[4] 徐宁,聂倩.利用车载三维激光测量系统进行城市道路竣工测量[J].测绘与工程勘察,2014(3):70-72.
收稿日期:2021-10-28
作者简介:熊剑飞(1980—),男,本科,高级工程师,研究方向:轨道交通工程测量及工程测量。
3542500338280
