
化石机器人学走路
2022-03-14 21:24
红领巾·探索 2022年3期
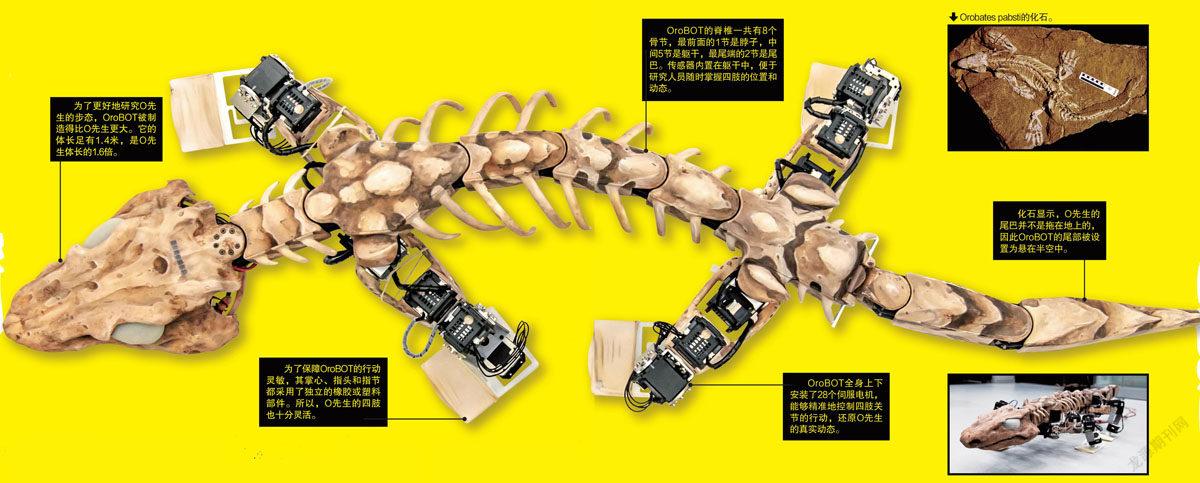





上图中这个化石机器人的原型是一种早已灭绝的远古四足动物,名叫“Orobates pabsti”,本文简称它为O先生。O先生大约生活在2.7亿年前的二叠纪,论资排辈,比恐龙的辈分还要大。一位名叫约翰·内亚卡图拉的教授带领的团队为O先生量身打造了一个机器人替身—OroBOT,用来研究2.7亿年前的远古四足动物是如何行走的。
约翰教授为何要这么做?他又是如何让O先生的机器人替身学走路的?接下来,让我们一起去破解这些有趣的谜团。
为什么要让OroBOT学走路?
二叠纪是远古生物从海洋逐渐“走”向陆地的关键时期。包括约翰教授在内的很多科学家都非常好奇,这些生物是以怎样的步态开启它们的陆地生活的。由于O先生是目前被发现的,能将完整的骨骼化石与足迹化石联系起来的最古老的生物,于是,它的替身—OroBOT顺理成章地成了最合适的研究对象。
让OroBOT学走路分几步?
500多步!
第1步:用计算机构建出O先生化石的三维模型。
第2步:利用3D打印技术制造一个与O先生的化
石结构相同的机器人替身——OroBOT。
第3步:用OroBOT模拟蝾螈贴地行走的步态。
第4步:用OroBOT模拟鳄鱼抬腹行走的步态。
第5步:用OroBOT模拟蜥蜴抬起上半身行走的步态。
……
在总计模拟了512种步态,并撞断了OroBOT的一根“肋骨”后,约翰教授的团队发现了最适合O先生骨骼结构的行走步态—先抬高四肢,再将其伸直,让身体远离地面,像鬣蜥一样昂首阔步地移动。而在此之前,科学界普遍认为,早期的陆地四足动物行走时身体是靠近地面的,是缓慢、笨拙的行走者。
化石机器人OroBOT帮助科学家了解到,远古四足动物比人类想象的更早地开启了先进的行走模式。除了OroBOT,还有许多仿生机器人也在科研领域做出了卓越的贡献。
形形色色的仿生机器人
飞檐走壁:壁虎机器人
壁虎之所以能飞檐走壁,全仰仗它爪子上那50万根刚毛。这些细小的刚毛能够与接触面产生巨大的摩擦力,支撑它的体重。美国斯坦福大学的教授马克·库特科斯基开发出一款叫作“黏虫”的壁虎机器人。它小小的爪子上附着有数百万根刚毛,这使得它能在背负摄像机等重物的情况下,像壁虎一样在墙壁、玻璃甚至天花板上行动自如,胜任各种救援和勘探工作。
柔术大师:章鱼机器人
哈佛大学的研究人员制造出了一个全软体的章鱼机器人。这款机器人通过控制体内气体的流动来运动。它由液体燃料供电,无须电池,全身软乎乎的,就像章鱼一样,可以穿过狭小的空间。
潜水先锋:蝠鲼机器人
新加坡国立大学的科学家研发了一种会游泳的仿生机器人,其外形酷似真正的蝠鲼—又扁又大。它能在水下以70厘米每秒的速度游动超过10个小时。
蝠鲼是一种行动隐秘的海鱼,捕食的时候几乎没有声音。通过模仿它的动作,蝠鲼机器人也有着近乎无声的运动方式,能够在不干扰海洋生物的情况下,进行海底探索、设备检修和海洋污染探查等工作。
空中飞侠:狐蝠机器人
狐蝠是一种大型蝙蝠,但狐蝠在夜间辨别方向通常靠的不是超声波定位,而是它水汪汪的大眼睛。通过模仿狐蝠的飞行方式,德国一家科技公司开发了一款能够自主飞行的小家伙—狐蝠机器人。它的翅膀采用了一种柔软而富有韧性的弹性纤維,由45000个焊点焊接而成。它能够在特定空间内半自主地移动—也就是说,它能够在不消耗能源的情况下,自己飞!
越障高手:蛇形机器人
美国卡内基梅隆大学的研究人员通过观察响尾蛇的两种运动模式—垂直震动和波浪式运动,设计了一款能够轻松爬过碎石等障碍物的蛇形机器人。它有16个关节,且相邻的关节保持垂直,这让它可以实现多种步态。美国国家航空航天局将使用这种机器人来进行太空探索。
挖洞高手:蠕虫机器人
科学家们从植物的根系和挖洞的蠕虫身上汲取了灵感,开发出一种能快速反应、可控的软体机器人。它看上去简直就像个丑萌的大蠕虫。但别小看它,它能够根据指令精确、快速地挖掘隧道。今后,月球表面的探索工作或许就要依靠它了。
3302500338258
猜你喜欢
快乐语文(2020年30期)2021-01-14
学苑创造·A版(2020年9期)2020-10-13
新农民(2020年15期)2020-06-22
作文周刊·小学一年级版(2020年16期)2020-06-12
意林(儿童绘本)(2018年3期)2018-05-09
作文大王·笑话大王(2017年10期)2017-11-03
少儿科学周刊·儿童版(2016年2期)2016-03-19
创新作文(小学版)(2016年25期)2016-02-28
中国环境科学(2015年7期)2015-08-30
阅读与作文(小学低年级版)(2015年7期)2015-05-30
