
智能助老爬楼机器人的发展及应用
2022-03-22 02:41陈运胜刘杰张勇维孙令真
科技风 2022年8期
陈运胜 刘杰 张勇维 孙令真

摘 要:结合计算机技术、人工智能技术、机器人技术的快速发展,从智能助老爬楼机器人国内外发展研究的现状、发展方向及应用前景等方面对目前的智能爬楼机器人进行了综合的论述,为工程技术人员进一步设计优化智能助老爬楼机器人提供理论参考依据,以解决国家人口老龄化增长背景下,老年人因行动不便、上下楼梯困难的问题。
关键词:人工智能;机器人;优化;老龄化
Abstract:Combined with the rapid development of computer technology,artificial intelligence technology and robot technology,this paper comprehensively discusses the current intelligent building climbing robot from the aspects of the development and research status,development direction and application prospect of intelligent building climbing robot at home and abroad,so as to provide a theoretical reference for engineering technicians to further design and optimize intelligent building climbing robot,In order to solve the problem that it is difficult for the elderly to go up and down stairs due to inconvenient movement under the background of national population aging growth.
Keywords:Artificial intelligence;Robot;Optimization;Aging
随着人口老龄化的增长,智能助老爬楼机器人也在不断发展更新,呈现出了新特点,关注老年人生活方式成为近年来民生讨論热门。在爬楼机器人设计和使用的发展初期,其框架和体积一般都比较大,需要采用功率和体积较大的电机和减速机,在这种情况下,材料和能源的浪费会进一步增多,生产造价成本也会增加,同时自重和动能也会较大,造成爬楼机器人的危险系数进一步提高。随着智能化技术的进一步发展和对机器人的持续性研究与不断探索,研究设计的智能助老爬楼机器人在性能上不断提升的同时,其轻量化设计也得到了进一步的优化和调整。
1 智能助老爬楼机器人国内外研究现状
目前,国内外研究的步行式爬楼机器人的优点有很多:一是步行式爬楼运动平稳,液压杆的液体阻尼系统稳定性能好,增强了使用者的人身安全保护作用。二是爬楼机器人可以适应多种不同环境和形式的楼梯。但是,步行式爬楼机器人存在不足之处。首先,它对控制系统和动能装置的要求比较高。其次,行走效率和预期效果并没有达到所需理想状态,还有其爬楼动作操作困难,爬楼时间长。除此之外,在实施爬楼梯时容易造成侧倾,存在一定的危险系数,这些缺点和不足直接导致了步行式爬楼机器人没有被广泛普及[1-3]。
随着机器人技术在全世界范围内的迅速发展,助老爬楼机器人作为机器人的一种新形式,国外的一些发达国家对爬楼梯机器人的研究设计及理论研究都走在世界的前列。这些国家很早就开始对爬楼机器人的设计和研究,利用理论知识与实物相结合,研究设计出多种能够行走攀爬楼梯的机器人,相对而言,轮式爬楼机器人和履带式爬楼机器人的研究设计最多,研究产品也比较成熟。虽然国外在爬楼机器人方面的设计研究成果丰硕,但在使用过程中受到爬楼机构运动不平稳、安全性能差、制造成本高等多方面因素的制约,使得产品目前市场使用较少。
我国对智能爬楼机器人的探索和研究设计在时间上相对于其他国家起步较晚,关于爬楼机器人这方面的发明和专利以及设计模型,虽然有很多,也提出了一些创新性的机构设计,但机构设计比较复杂,装配困难,维修和控制难度大且工作效率不高。因此,要实现无障碍地连续爬楼运行,还有许多技术难点需要解决。根据市场需求,为解决老年人上下楼梯不便问题势在必行。智能助老爬楼机器人正朝着功能集成化方向发展和不断优化,比如设计轻量化和健身功能的集成,操作简单,方便出行。
2 智能助老爬楼机器人的发展方向及应用前景
2.1 发展方向
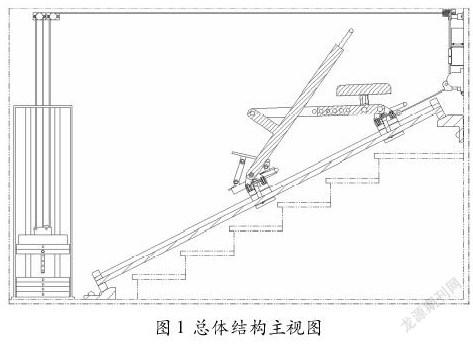
目前,市场上助老爬楼机器人的主体爬行机构较多,但杆上爬行机构并不多见,现有技术存在整体结构复杂、制造成本高、操作不方便等诸多问题。每种设计研究的爬楼机器人都具有自身的优越性和局限性,对各种爬楼机器人展开研究设计,其发展的方向一是轻量化设计,二是结构优化设计,能够满足老龄化人群使用,安全、便利、可靠,解决他们的出行问题。总体设计布置合理、结构简单、造价成本低、轻量化、安全系数高、自锁功能好、操作简单、适用范围广,不但解决老年人上楼梯困难的问题,还解决了老年人可以在室内健身的问题,见图1所示。
经过对智能助老机器人的结构分析,要求其模型最小安全系数显著提高,质量也有所减轻,使其具有质量轻、强度高、密度小等优质的力学特性,极大地扩展轻量化设计方向,确定结构优化的整体方案。从整体结构设计和材料更换这两方面对智能爬楼机器人进行整体轻量化研究设计。例如,用铝合金材料代替原来的材料,实现轻量化设计。轻量化设计后的爬楼机器人在保证整体强度和刚度满足使用要求的基础上减轻重量成果显著。对主体结构进行轻量化设计涉及两个方面:一方面是整体结构设计轻量化;另一方面是设计零部件材料轻量化。整体结构轻量化设计可进一步提高其机动性能,减少能量消耗。主要是在爬楼机器人减轻运动惯性、提高操作速度和动作准确度方面的优势突显出来。设计材料轻量化相对于主体结构轻量化,使得爬楼机器人的减重潜力更大,应用范围更广[4-5]。
智能助老爬楼机器人的轻量化设计是基于负载自重比的设计研究。在同样负载情况下,智能爬楼机器人的质量和体积越小,它的负载自重比就会越大。爬楼机器人主体结构质量越小,在设计和选型时可以选用质量较小的电机和减速器,进而实现对机器人整体性能和结构的轻量化设计优化。机器人主体结构优化和材料轻量化的研究,也是未来智能爬楼机器人研究设计的重要方向。形状优化、尺寸优化和拓扑优化都是轻量化设计中的关键技术,其中拓扑优化的目的是实现材料最优分布。优化部分就是指定的设计空间,对设计模型施加约束条件和载荷等一系列工况条件,在工况条件需求得到满足的情况下,拓扑优化与尺寸和形状优化相比,材料的浪费更少。
对智能助老爬楼机器人的主体结构优化和材料轻量化设计研究,在一定程度上受限于传统工艺的制造技术,优化方法只是一些传统的制造工艺方法,比如开孔、开槽、添加加强筋以及增大或减小尺寸等。大部分优化设计都是在拓扑优化的基础上,利用传统制造工艺的可加工性来进行二次建模。这种情况下,反而会破坏拓扑优化所得到的最优结构主体。而随着增材制造技术的进一步发展,为满足智能助老爬楼机器人结构具有高刚度、高振动频率与低质量等性能特征要求,提供新的主体结构优化设计条件,也使得设计的助老爬楼机器人突破传统工艺结构局限性,实现其特定功能和应用技术。
目前,智能助老爬楼機器人的主体结构设计复杂、操作及运动路线变化频繁且复杂,在实际工作过程中,需要实时响应时间短,操控动作便捷,再加上机器人本身存在自重,因而机器人承载较大。智能助老爬楼机器人在工作过程中,一直处于高速度和高频率的运动状态中,运动工况比较复杂。助老机器人的整体质量,各部分构件的材料、结构刚度和频率改善,对于助老爬楼机器人综合性能的进一步提升具有显著效果。比如,整体质量较轻的机器人,其整体安全和稳定性能较好,运动精度和动作响应速度得到了进一步提高,工作噪音和震动情况会明显减少等等。因此,对智能助老爬楼机器人进行主体结构优化、零部件材料优化和整体轻量化的研究设计极为重要。当前,形状优化、尺寸优化和拓扑优化等优化方法被广泛应用在目前机器人结构设计中,经这些方法优化设计完成后的机器人综合应用性能得到了显著改善和提高。实践证明,这些方法可以较好地完成主体结构优化的目的。但是在实际优化设计过程中,智能助老机器人的结构刚度、整体质量和固有频率等优化目标之间又存在相互矛盾关系。比如,减轻助老爬楼机器人质量很可能会造成主体结构刚度的降低,在同样负载条件下,会出现机器人最大位移量增加、爬楼运动精度降低等情况。
综上,智能爬楼机器人应满足以下设计要求:路面适应性能好,具有较强的越障能力;能翻越一般住宅建筑标准中绝大部分的楼梯[6],并且能灵活通过楼道;爬楼机器人运行平稳、安全可靠,可以全方位移动;控制简单,容易操作。除此之外,要求体积小,质量轻,要进行轻量化设计,在轻量化设计过程中涉及安全性能、材料的强度、刚度等力学性能是否满足要求等一系列问题。轻量化后的智能机器人,蕴含着极大市场销售份额。
2.2 应用前景
现如今,人们对健康越来越重视,而且随着科学技术和人工智能技术的进一步发展,以及日趋严重的人口老龄化问题,失能和半失能的老龄年人口数量将越来越多。同时,我国的残障人士的数量也是不断上升,下肢发生残疾人口的数量是肢体残疾中最多和最常见的,他们需要借助辅助工具才能进行正常工作生活。而城市的活动空间极为有限,为有效利用空间,目前高层住宅已经非常普遍。然而,那些残障人士和一些失能、半失能的老年人,他们需要借助轮椅才能正常活动,当遇到台阶、斜坡和爬楼梯时,轮椅却不能发挥它的作用。未来智能助老爬楼机器人的设计理念和一般步骤是经人机分析确定爬楼机器人的主体尺寸,然后进行机构优化设计和力学校验。并对机器人传动组件模型进行了运动学分析,掌握运动性能特征,验证其优化方案的可行性。在控制系统运动方面,设计控制流程图,设定智能助老爬楼机器人功能。在外观主体设计和应用性能方面,赋予智能助老爬楼机器人多种外观设计,然后进行部分零部件的细节展示,并配合不同模块的使用状态和功能展示,最后设计出能够辅助失能、半失能老年人和下肢残障人士的智能助老爬楼机器人。助老爬楼机驱动多元化,操作简单方便,适用性价比高,主体结构优化,生产造价成本低,实用性强,市场前景广阔。
结语
为进一步满足智能助老爬楼机器人向轻巧高效、操作便捷和产品经济型等方面发展的需求,整体结构轻量化设计是未来爬楼机器人的发展趋势。同时,部分智能助老爬楼机器人不仅可以爬楼,还具有运动健身功能,同时满足老年人生活和健身需求[7]。目前国内外市场上,智能助老爬楼机器人已开始投入生产及应用,但部分产品还存在结构复杂、造价成本高、笨重、智能化不高等问题。随着科技的发展,以适应人口老龄化的快速增长带来的生活问题,如何更好地对已有的产品进行结构优化或轻量化设计,将是工程技术人员重点研究的方向之一。
参考文献:
[1]尹鑫磊.多功能电动爬楼机设计[D].天津科技大学,2017.
[2]韩进伟.一种新型爬楼助力机构的设计与分析[D].北京交通大学,2020.
[3]吕国娜.助老机器人关键技术研究[D].山东科技大学,2019.
[4]陈贺贺.工业机器人机械臂的结构优化和轻量化研究[D].江苏科技大学,2020.
[5]王朝辉,贾林,杜文博.镁合金材料在机器人轻量化上的应用浅析[J].新材料产业,2016(07):14-17.
[6]张声岚,钟学涛,甘礼福,钟志贤.一种摇臂轮组与行星轮组相结合的爬楼越障机器人结构设计[J].河南科技大学学报(自然科学版),2021,42(03):12-18+3.
[7]杨宇,贾永兴,荣传振,王渊,朱莹.第2讲多关节机器人技术研究进展[J].军事通信技术,2017,38(02):84-91.
基金项目:2021年度广东省普通高校特色创新类项目(编号:2021KTSCX349)
作者简介:陈运胜(1982— ),男,汉族,海南乐东人,本科,副教授,研究方向:机械设计优化。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
中学生数理化·高三版(2021年12期)2021-09-05
中国品牌(2021年6期)2021-08-06
意林·作文素材(2021年10期)2021-06-18
健康之家(2019年9期)2019-12-14
福建基础教育研究(2019年11期)2019-05-28
中老年健康(2016年10期)2016-11-19
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
