
基于AAFSA-LSTM的大坝变形预测模型
2022-03-24 09:45杨宗仁
水利与建筑工程学报 2022年1期
杨宗仁,杨 凯,王 健
(1.陕西省水利电力勘测设计研究院,陕西 西安 710001;2.西安建筑科技大学,陕西 西安 710055)
近年我国城市化建设的进程呈逐年加速趋势,在现阶段水利工程建设作为重要基础设施占据着着举足轻重的地位[2]。随着各地区水利工程项目的数量越来越多,大坝安全受到相关工程人员的高度关注[3]。现阶段,为了保障大坝的安全运行,一种有效的方法便是对大坝变形的实时情况进行准确预测[4]。影响大坝安全稳定的因素众多,这些影响因子的内在关系繁杂多变,科学准确地预测大坝变形仍然面临着诸多挑战[5]。
用于大坝变形研究的方法主要有传统的有限元法[6]、多元线性回归法[7]等,但这类方法的精度远远无法满足需求;随后,学者们利用确定性和统计组合模型来分析大坝位移[8],但实际上,大坝变形的影响因素通常并不确定且难以分析,因此这类方法的效果也十分有限。近年来,随着大数据和人工智能的兴起,许多新的模型应运而生。许多研究者将支持向量机[9]、模糊理论[10]、灰色模型[11]以及BP神经网络[12]等应用于大坝变形预测,虽然预测效果得到了一定改善,但依然有待提高。
有学者根据ARIMA时间序列模型[13]预测大坝变形,实现对累积变形位移的滚动预测,但由于大坝变形的非线性动力学特征复杂致使预测时间延长,预测精度下降,可见大坝变形的过程是动态的。由于长短时记忆网络LSTM属于动态神经网络模型,且该模型已经在诸多领域取得了不菲的成就,因此,本文利用LSTM对大坝的变形位移进行预测。但训练LSTM时其超参数难以确定,导致预测精度有限。为了提高模型精度,引入人工鱼群算法对LSTM结构的隐层节点数、时间步长及学习率等参数进行优化,以期提高模型的性能。
1 工程概况
本水利工程总库容1 766万m3,工程规模为中型。主要建筑物以3级设计,次要建筑物以4级设计。工程主要由拦河坝、导流泄洪洞、移动泵船、右岸管理道路等组成。大坝是碾压均质土坝,坝顶宽度7.0 m,其高程721.70 m,长度180 m,建基面最低高程664.00 m,最大坝高57.7 mm。上游坝坡1∶2.75、1∶3.00,在698.00 m高程处设2.2 m宽戗台,上游坝面设置浆砌石网格,格内进行干砌块石护坡,厚度300 mm;下游坝坡在698.00 m高程设2.2 m宽戗台,戗台以上、以下均为1∶2.5,下游坝坡采用草皮护坡,坝趾处设排水棱体,高度5 m,顶部高程669.00 m,内坡比1∶1.5,外坡比1∶2。
按照中华人民共和国行业标准《土石坝安全监测技术规范》[14](SL551—2012)、《水利水电工程安全监测设计规范》[15](SL725—2016)等规范规定,确定大坝主要设定4个安全监测项目:日常巡视检查、表面变形监测、渗流监测、水文和气象监测。本文以表面变形监测布置为研究对象。
表面变形监测包括水平和竖向位移监测两个方面,用于了解大坝的整体稳定性。在坝上5.425 m、坝下3.500 m、坝下40.250 m、坝下79.750 m和坝下117.250 m布设观测纵断面。每个观测纵断面上按间距30 m原则布置观测点,共25个测点。水平位移观测点与表面竖向位移观测共用一个测点。
视准及水准观测的工作基点,设在坝外岸坡的基岩上,5个观测纵断面共设10个工作基点,10个校核基点,同时将校核基点纳入坝体设置的测量控制网进行校核。
大坝观测中控室设于枢纽管理站内,主要用于通讯联络、水库调度。中控室与枢纽管理处之间通过有线和无线两种形式进行联系。中控室与枢纽建筑物之间通过有线形式进行连接。
2 基本理论
2.1 长短时记忆网络
循环神经网络RNN是一种典型的动态神经网络,该网络描述了一个序列当前的输出与之前状态信息的关系[16]。该结构具有记忆性,可将以前的信息作用于后续结点的输出。但RNN结构存在梯度爆炸或消失问题,为了解决该问题,研究者提出了长短时记忆网络LSTM[17]。与RNN相比,LSTM的隐层增添了一个状态c并引入了“门”。在一个单元中引入输入门、输出门和遗忘门。输入门的作用是计算某时刻Xt保存到单元状态Ct的程度;输出门的功能是统计Ct有多少输出到ht;遗忘门是为了判断上一时刻的Ct-1保留到当前Ct的程度。由于权重是动态改变的,所以在模型参数固定的条件下,不同时刻的积分尺度也是随之变化的,从而避免了梯度消失或爆炸的问题,较大程度提高了RNN的性能。
LSTM和RNN的差异在于每个模块中的结构不同,LSTM拥有4个网络层,以一种特殊方式相互连接。图1为RNN与LSTM的结构对比图。

(a)RNN (b)LSTM
LSTM的主要结构算法如下:
ft=σ(Wf·[ht-1,xt]+bf)
(1)
it=σ(Wi·[ht-1,xt]+bi)
(2)
(3)
(4)
ot=σ(WO·[ht-1,xt]+bo)
(5)
ht=ot·tanh(ct)
(6)

2.2 人工鱼群算法
人工鱼群算法AFSA有群规模、人工鱼视野、步长Step、拥挤因子和重复次数5个参数[18]。设算法求解维度为D,人工鱼i当前状态为Xi,个体搜索的上限和下限分别是Ub和Lb,用Yi=f(Xi)表示人工鱼i所在位置的食物浓度,即目标函数。寻优时设立公告板,其目的是记录每次迭代后鱼群中具有最大函数值的人工鱼的状态和位置。
算法具体流程如图2所示。

图2 人工鱼群算法流程图
AFSA算法的求解过程可参考文献[8]。
2.3 改进人工鱼群算法
AFSA算法在后期存在着收敛速度变慢且精度不高的缺陷[19]。而视野和步长在很大程度上影响算法的收敛速度和精度。为了平衡收敛性和精度,本文采用自适应的方法对AFSA算法的视野和步长进行处理,使其能够动态调整取值。
在原始AFSA算法中引入衰减因子,随着迭代次数不断增大,衰减因子逐渐减小,利用该因子对视野和步长作动态调整,即视野和步长与迭代次数呈负相关性。同时为两个参数指定下限,避免后期影响寻优精度。自适应参数计算公式如下:
α=exp(-30×(t/tmax))
(7)
Visual=αVisual+Visualmin
(8)
Step=αStep+Stepmin
(9)
其中:α为自适应衰减因子;tmax为最大迭代次数;t为当前迭代次数;Visualmin和Stepmin为视野和步长下限。
引入自适应策略的AFSA算法,能够兼顾全局和局部搜索。开始时视野和步长较大,算法能够迅速收敛。随着二者的减小,使搜索范围减小,精度提高。
3 实验分析
3.1 数据来源
为了解大坝在运行期间坝体的变形情况,以及验证本文建立的大坝变形预测模型性能,选取该大坝坝顶监测点在垂直方向上的实际累积沉降位移作为研究样本,样本获取时间段为2016/01/02—2020/01/16,表1中列出了部分数据。将样本数据分为两部分,选取其中72个样本数据作为训练集,其余10个数据作为验证集。

表1 大坝实际变形位移
该点位在2016-01-02—2020-01-16时间段内总体处于下沉状态,数值上具有明显的上下浮动,表现为局部随机性和波动性,但整体上呈现出非线性和弱周期性。因此,使用本文提出的模型进行位移预测前,先通过异常值处理和归一化[20]等方法对数据进行预处理以减小噪声干扰,使预测精度更高。
3.2 LSTM模型实验

根据经验,分别选取5~10个影响因子进行预测,隐层层数为2,每个隐层节点数为4,输出节点数为1,即2-4-4-1结构,其余参数选取如表2所示。

表2 LSTM模型参数设置
利用验证集对模型进行测试,通过对不同影响因子组合进行实验,比较各种组合的预测效果,以不同输入维数中预测效果最佳的组合为例,不同输入对应的均方根误差RMSE和拟合度R2如表3所示。
从表3可以看出,实际上,并非影响因子越多预测效果就越好。当影响因子数为6时,位移预测的RMSE最小为0.097,对应的拟合优度R2最大为84.87%。因此,最终选取的输入维数为6,分别是H1、T0、θ、lnθ、sin(2πt/365)、sin(4πt/365)。

表3 不同输入对应的RMSE和R2
利用验证样本集将LSTM模型与常用的BP神经网络模型、RBF神经网络模型和逻辑回归模型进行对比,预测结果如图3所示。

图3 四种模型预测结果
从图3可以看出,四种模型的预测结果中,LSTM模型的预测值与实际值最为接近,拟合效果整体上优于其他三种模型。
表4中列出了本次实验中验证集在各模型上的平均绝对误差MAE、平均相对误差MRE、平均绝对百分比误差MAPE、均方根误差RMSE[22]以及拟合度R2。

表4 各模型评价指标
从表4可知,四种模型的预测效果对比中,LSTM的误差最小,拟合优度最高,预测效果最好,BP神经网络的效果稍逊,但优于其他两种模型,RBF神经网络又比BP神经网络稍差,逻辑回归的结果偏差最大。这说明LSTM的整体表现相比于其他三种模型更优,预测结果更接近于实际大坝位移。
虽然以上实验过程中LSTM的预测效果最好,但仍有较大的提升空间。
3.3 优化LSTM模型实验
为提高LSTM模型的预测精度,需要对LSTM的超参数进行优化,本文利用AAFSA来优化LSTM对大坝位移进行预测。具体优化对象包括隐层节点数、步长及学习率等。参阅其他研究者的经验[23]并结合自身经验,人工鱼群优化算法各参数设置如表5所示。
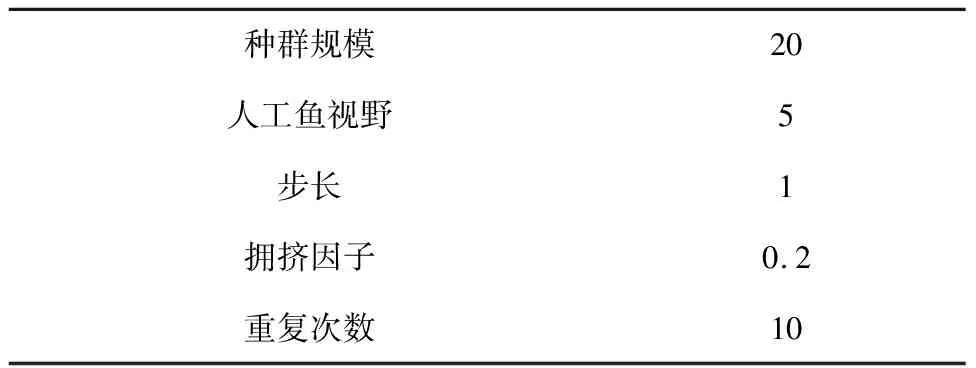
表5 AFSA参数设置
针对本次实验的数据集,AAFSA 寻优的最佳参数如表6所示。

表6 AAFSA 寻优的最佳参数
根据优化后的参数建立预测模型,并将该模型的预测结果与优化前的LSTM模型进行对比,结果如图4所示。

图4 LSTM与AAFSA-LSTM预测结果对比图
图4表明,与LSTM模型相比,优化后的AAFSA-LSTM模型在验证集上的预测效果更好,预测位移和实际位移的接近程度更高。表7为验证样本在LSTM和AAFSA-LSTM模型上的预测评价指标值。
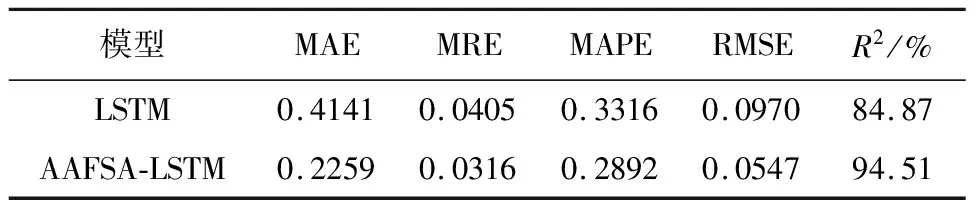
表7 LSTM和AAFSA-LSTM评价指标
从表7中可以看出,AAFSA-LSTM模型比LSTM的性能有所改善,即在验证样本集中,预测的大坝位移与实际位移之间的差距在3%左右。
4 结 论
本文在大坝变形监测中引入长短时记忆神经网络,并选择人工鱼群算法对网络参数进行优化,建立了基于改进人工鱼群算法的长短时记忆网络大坝变形预测模型。通过实际工程案例的位移数据验证了该模型能够较好地提高预测精度,避免模型的过拟合,相比传统模型,可更加准确地预知大坝的运行状态,为大坝的安全运行和管理提供了新的借鉴。
猜你喜欢
肇庆学院学报(2022年5期)2022-09-29
成都信息工程大学学报(2021年5期)2021-12-30
西安邮电大学学报(2021年1期)2021-04-19
电子制作(2019年23期)2019-02-23
百科知识(2018年6期)2018-04-03
中外文摘(2017年19期)2017-10-10
中国篆刻·书画教育(2017年5期)2017-06-08
少儿科学周刊·少年版(2016年4期)2017-02-15
北京航空航天大学学报(2016年12期)2016-02-27
湖南大学学报·自然科学版(2014年3期)2014-12-30
