
一种改进的图像边缘检测方法
2022-03-26 06:53李丙春张宗虎
东北师大学报(自然科学版) 2022年1期
刘 晨,李丙春,袁 玲,张 奎,张宗虎
(喀什大学计算机科学与技术学院,新疆 喀什 844006)
图像的边缘检测[1]是图像处理中最困难的技术之一,边缘检测的精确度决定了计算及分析的成功与否,边缘检测是图像分析处理的基础,具有十分重要的地位.近年来,人们研究了众多图像边缘检测方法,文献[2-5]利用各种算子、变换域、水平集、模式特征等方式方法实现图像边缘的检测与提取.
文献[6-7]研究表明,图像的边缘信息可以根据人眼的视觉性特征通过图像中的像素一致性来获得,从而提出一种新的基于欧式距离图的图像边缘检测方法.该方法使用环绕图像像素的矩形块代替单个像素来描述图像的结构特性,计算区域的欧式距离从而放大图像边缘与背景的差异.文献[8]在原先欧氏距离图的基础上,计算图像块的高斯加权的欧式距离.两种基于欧式距离的计算方法能较好地突出图像的边缘轮廓,但是没有区分图像块中心像素点对距离计算的影响,基于此本文提出一种新的欧氏距离的计算方法,强化图像块中心像素在距离计算中的作用,为了消除噪声对距离图的计算影响,利用主成分分析去除图像块组中的图像块之间的相关性,消除图像块组之间的冗余,得到新的欧氏距离图,相较于以前的两种欧氏距离图,新的欧氏距离图能更好地区分背景与边缘信息,特别是在受到噪声影响情形下.在前面分析的基础上,首先对CV水平集方法进行改进,再结合图像的局部特性进一步改进水平集方法,通过改进的方法对得到的距离图进行边缘检测,从而获取最终的目标轮廓.
1 改进的欧氏距离图
文献[7-8]分别定义了两种欧氏距离计算方法:
(1)
(2)
其中v[Ni]是以i为中心的环绕i的图像块,G是高斯核.文献[7]验证了由于人类的视觉特征,采用图像块的欧氏距离可以放大边缘像素的差异,文献[8]计算高斯加权的欧氏距离,考虑不同位置像素对距离计算的贡献度的不同.本文改进了欧氏距离计算公式,强化图像块的中心像素的作用,进一步增强边缘像素的作用.
欧式距离计算不足之处如图1所示,假设图像未受到噪声的污染,图1左半部分的亮度值为100像素,右半部分的亮度值为200像素,像素i,j,k分别以环绕图像中心像素的图像块代替单个像素来描述图像的结构信息.根据文献[9-10]可知,在图像局部区域中,两个图像块的欧氏距离值越小,则两个像素的差异越小,两个像素越相似.以公式(1)分别计算图像块距离dij和dik,可以得到dij=3×104,dik=6×104.由图1可知,以i为中心图像块和以j为中心的图像块的中心像素i和j完全相同,以i为中心图像块和以k为中心的图像块的中心像素i和k完全不相同,但是距离dij和dik计算结果值在同一个数量级上,并没有放大边缘像素的差异.根据公式(1)和(2)分析,高斯加权的欧氏距离值是小于欧氏距离值的.为了强化边缘中心像素差异,应该强调图像块中心像素在距离图计算中的作用.为此本文提出一种新的强化图像块中心像素的欧氏距离计算方法
(3)

图1 中心像素点分析
式中:dc为图像中两个像素的新的欧式距离;v[Ni]是以i为中心的环绕i的图像块;c[Ni]是以i为中心的环绕i的图像块,但是图像块中像素灰度值都是中心像素i的灰度值.根据公式(3),可以计算得到dij=3×104,dik=1.5×105.在新的欧式距离计算中,具有不同中心像素的图像块距离dik的值远大于具有相同中心像素的图像块距离dij.从而强化了边缘像素的差异,更加突出边缘与背景区域信息.新的距离图的计算方法具体如下:
(1) 定义变量并且初始化.输入图像I,距离图D,新的欧氏距离Dc.
(2) 读取输入图像没有处理的像素点Ic,设置中心像素点Ic的搜索区域,设定搜索区域半径为t,从而获得搜索矩形区域Rs.
(3) 读取Rs中的其他像素,分别构造以中心像素Ic和Rs中其他像素Io的图像块,图像块的半径为f.计算Rs中每一个像素点和中心像素点新的欧氏距离dc,并且累加Rs中的中心像素与其他像素所有的dc,计算Dc=Dc+dc.
(4) 计算当前中心像素Ic的平均欧氏距离Dc=Dc/Rs(num),Rs(num)表示搜索矩形区域Rs的像素个数.并将Dc作为距离图D相对应位置的像素值,Dc初始化为零值.
(5) 输入图像I其他没有处理的像素点转入步骤2.
(6) 对距离图D进行归一化处理.D=(D-Vmin)/(Vmax-Vmin).Vmin和Vmax分别为步骤5中得到的距离图D中的最小值和最大值.
2 PCA冗余消除
在实际的计算中,图像往往受到噪声的污染,在进行新的距离图计算前,消除噪声对计算距离图的影响非常重要,利用主成分分析PCA去除图像块组中的图像块之间的相关性,降低图像块组之间的冗余.根据文献[11-12]研究可知,PCA是将数据进行降维的一种数据简化技术,是一种线性变换,PCA常应用于人脸识别和异常检测,本文利用PCA进行图像降噪.


图2(a)是一副简单的目标为五角星的图片,是无噪声图像,图2a和2b分别是添加噪声标准差为5和20的噪声图像.图2(d)和2(e)是经过PCA降噪后的结果图.对图2的处理结果可以采用峰值信噪比PSNR和结构相似性指数SSIM来衡量降噪的效果.PSNR值越大降噪效果越好,SSIM值在0到1之间,越接近1降噪效果越好.经过PCA处理后,标准差为5的噪声图的PSNR和SSIM值分别为45.133 9和0.984 8,标准差为20的噪声图的PSNR和SSIM值分别为35.624 0和0.847 9.从效果图和评价准上可以看出此种方法可以抑制噪声.

图2 不同噪声水平以及降噪结果
3 欧式距离图的边缘提取
前面计算距离图,已经在一定程度上增强了图像的边缘,将图像的边缘区域和平坦区域大致分布在两个不同的灰度级别上,本文对经典的CV水平集[13]方法进行改进,使用改进的CV水平集方法提取图像边缘.
设图像I被闭合的轮廓曲线C划分为内部和外部两个区域,内外两个同质区域的灰度平均值分别为c1和c2,则CV水平集模型是极小化的能量泛函为
(4)
式中:,λ1,λ2为给定的参数,L(C)为曲线C的长度,可以求得水平集函数的演化函数为
(5)

(6)
公式(6)变形为
(7)


图3 活动轮廓演化
改进的CV水平集方法的有效性见图4.图4中第一行绿色虚线方框表示初始水平集函数位置.第二行为对应得到的边缘结果,从图4中可以发现不论初始水平集函数位置和大小怎么选取,水平集函数最终都收敛于图像的边缘处,验证了本文提出方法的有效性.

图4 不同初始位置边缘检测
由上述分析可知:(7)式水平集函数最终的零水平集是水平集函数内外区域的均值平均;(7)式中c1和c2表示两个聚类中心;(7)式是依据硬阈值点对图像进行像素不同的分类,没有完整考虑不同像素之间的区别,其是基于图像全局性质的,并没有考虑像素之间的局部性质.根据以上分析,本文提出结合全局和局部信息的水平集函数演化方程公式,以便适应于复杂图像的聚类,公式为
(8)

将(8)式进行变形可得
(9)
根据CV模型的最终演化方程(5),提出结合局部信息的CV模型演化方程为
(10)
根据文献[17]可知,具有局部信息的水平集分割方法对水平集的初始位置敏感,本文先使用对初始位置不敏感改进的(7)式进行预分割,再使用结合局部信息的(10)式进行进一步分割.传统的水平集方法,初始水平集函数初始化为符号距离函数,并且在轮廓的演化过程中,为了保持数值的稳定,每次演化水平集函数都需要重新初始化,导致计算量大,并且不稳定.本文使用文献[18-19]提出的高斯滤波正则化函数实现活动轮廓的正则化,此正则化函数可以保持水平集函数的光滑,并且无须重新初始化水平集函数.则改进的水平集模型具体实现步骤为:
(1) 输入距离图像D,初始化水平集函数φ;
(2) 根据公式(6)和(10)更新水平集函数φ,对水平集函数进行高斯函数光滑;
(3) 检查演化方程是否稳定,不稳定返回步骤2,稳定则结束.
4 实验结果与分析
本文在无噪声图片以及受到不同噪声污染的图片上验证所提出的边缘检测方法的有效性,并与文献[7-8]两种基于欧氏距离的边缘检测提取方法、经典CV水平集方法[13]以及经典的canny算子方法进行对比实验.实验中的参数设置,水平集函数内外值分别为-1和1.即φ(x,y)=1∶(x,y)∈out(C),φ(x,y)=-1∶(x,y)∈in(C).时间步长Δt=0.05,空间步长Δx=VΔy=1.初始水平集位置为距离图像外侧边缘5像素位置的矩形框.高斯滤波正则化函数中sigma为1.5,窗口半径取值为5.水平集函数的高斯核函数sigma为3,窗口半径取值为7,PCA降噪.窗口半径为3,训练窗口半径为20.在3种距离图的计算中,图像块窗口f取值为1,搜索窗口t取值为3.其他方法中的参数取值参照具体文献.实验(1)图片为合成图片,实验(2)和(3)图片分别来源于文献[7-8],实验(4)—(6)图片来源于文献[20].采用Matlab2012进行程序编写.
实验(1)是一幅简单目标为五角星的图像,如图5所示,图5(a)是无噪声图像,图5(b)和5(c)分别是添加噪声标准差为5弱噪声和标准差为20强噪声的图像.图5a(1)—5c(1)是文献[7]提出的欧式距离计算方法分别针对图5(a)—5(c)得到的欧式距离图.图5a(2)—5c(2)是文献[8]提出的高斯欧式距离计算方法分别针对图5(a)—5(c)得到的欧式距离图.图5a(3)—5c(3)是本文提出的方法,分别针对图5(a)—5(c)得到的欧式距离图.通过图5可以发现,在简单的无噪声中,3种欧式距离计算方法都能有效地将背景和边缘分布在两极灰度上.但是随着噪声的增强,前面两种距离图方法明显受到噪声的影响,计算结果出现偏差.本文提出的新的强化图像块中心像素的欧氏距离能增强中心位置像素的作用,并且使用主成分分析消除图像块之间的冗余性,在噪声图片中更能突出图像边缘信息,从而使得距离图的计算基本不受噪声的影响,如图5所示.通过图5可以看出,不管是无噪声图像还是受到不同噪声大小影响的图像,本文方法最终都能正确计算距离图.

图5 简单图像无噪声以及不同噪声水平距离图
实验(2)—(6)是图6—10表示景物、实物、人物、建筑、空域等五大类实际图像以及添加不同噪声水平的噪声图像.通过图6—10实验结果来看,3种欧氏距离计算方法在无噪声情况下能很好地区分背景区域和边缘区域.随着噪声水平的增强,欧氏距离图和高斯欧氏距离图都出现了计算误差,并且随着噪声水平的增加,误差水平逐步加大,本文方法相较于其他两种方法能更好地区分背景区域和边缘区域,几乎不受到噪声的影响,在无噪声和不同噪声水平下计算得到的距离图基本一致.文献[7]欧氏距离图是采用环绕像素点的图像块来描述图像结构,随着噪声的增大,必然受到影响.文献[8]高斯欧氏距离图是在中心像素为基本条件基础下,考虑不同位置的像素点对中心像素点贡献的不同,随着噪声的增大也会受到影响.本文方法考虑到环绕像素点的不同图像块中心像素点之间的差异,并且在计算之前,使用PCA主成分分析消除不同像素块之间的冗余性进行降噪处理,使得新的距离图的计算基本不受噪声的影响.
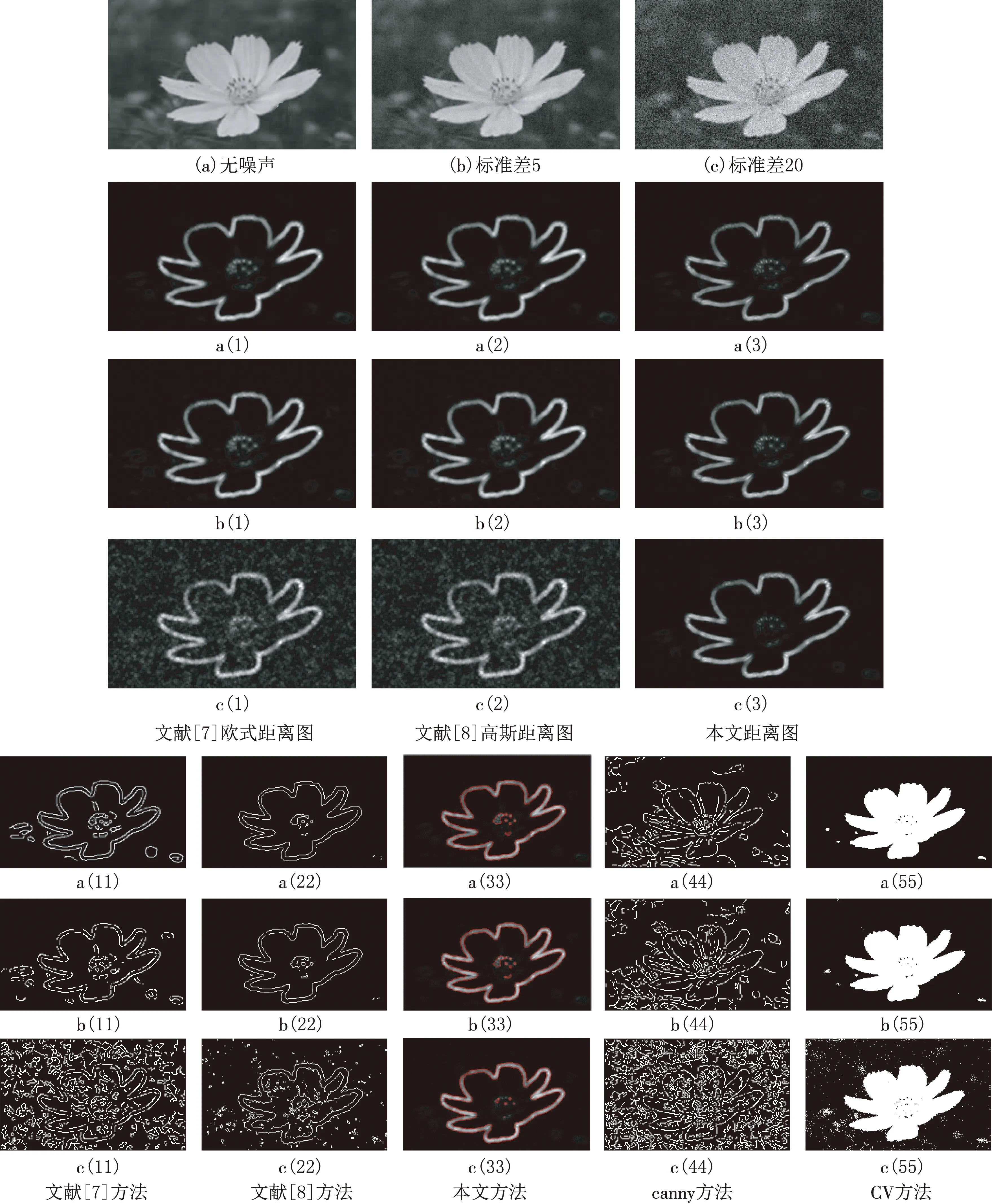
图6 荷花无噪声和噪声图不同距离图以及边缘检测结果
在最终的边缘提取上,本文方法在无噪声和噪声图像上都能较为正确地提取图像边缘信息.在无噪声的情况下,使用欧氏距离图方法[7]、高斯欧氏距离图方法[8]和本文方法都能正确提取图像的边缘信息,canny方法的图像边缘细节增多,经典CV方法只能对一些简单规则图像能正确提取边缘,细节丰富的图像边缘不能很好地提取.而随着噪声水平的增加,文献[7-8]、canny方法、CV方法都不能正确提取图像的边缘信息,在强噪声影响下,有的方法甚至在人工目视下,都不能区分提出的边缘,而本文的边缘提取不受噪声的影响.

图7 帽子无噪声和噪声图不同距离图以及边缘检测结果

图8 人物无噪声和噪声图不同距离图以及边缘检测结果

图9 建筑无噪声和噪声图不同距离图以及边缘检测结果

图10 飞机无噪声和噪声图不同距离图以及边缘检测结果
首先本文距离图的计算不受噪声的影响,其次在对无噪声图像和不同噪声影响的图像距离图进行边缘提取,使用改进的全局CV水平集方法,再结合图像的局部信息进一步改进水平集方法,最终得到的图像边缘检测基本不受到噪声的影响,都能提取出图像中人们感兴趣的边缘信息,如文中的荷花边缘、帽子边缘、人物边缘、房屋边缘和飞机边缘.其他对比实验方法只有在无噪声情况下才能较为正确提取图像边缘信息,随着噪声水平的增加,已经不能检测图像的边缘信息.值得注意的是,对于细节更为丰富的图像,欧式距离不能很好地表示图像的结构信息,这也是文献[7-8]以及本文没有使用细节丰富的经典Lena等作为测试图像的原因.
5 结语
本文提出一种新的欧氏距离计算方法,强化距离计算中图像块中心像素作用,并且在计算之前使用主成分分析PCA消除图像块之间的冗余性,从而得到新的更能突出边缘和背景信息的距离图,使得新的距离图的计算不受噪声影响,最后对距离图使用改进的水平集方法进行边缘检测.实验结果表明,本文提出方法相较于其他方法可以有效地得到图像目标轮廓,为后续图像分析处理提供便利.
猜你喜欢
家庭影院技术(2021年6期)2021-07-28
上海工艺美术(2021年4期)2021-04-24
舰船科学技术(2021年12期)2021-03-29
劳动保护(2019年3期)2019-05-16
戏剧之家(2018年12期)2018-06-13
通信产业报(2016年44期)2017-03-13
文艺生活·下旬刊(2016年12期)2017-01-11
饮食科学(2016年7期)2016-07-27
现代电子技术(2009年13期)2009-08-31
雕塑(1999年2期)1999-06-28
