商用车轮胎装配机械臂的结构简介与应用
2022-04-11 12:57李必冬
汽车科技 2022年2期
关键词:机械臂

摘 要:本文主要介绍了商用车轮胎装配机械臂的设计及应用,通过机械臂的人机交互模式,采用气动平衡控制系统、自动随行技术及电动夹钳等技术,解决了轮胎装配过程中的问题,提升了轮胎装配效率和汽车装配线的自动化水平,具有推广价值。
关键词:机械臂;气动平衡;电动夹钳;自动随行
中图分类号:U463.34 文献标识码:A 文章编号:1005-2550(2022)02-0029-04
Structure Introduction And Application Of Tire Assembly
Manipulator For Commercial Vehicle
LI Bi-dong
(Dongfeng Commercial Vehicles Co., LTD vehicle factory, Shiyan 442000, China)
Abstract: Commercial vehicle tire assembly is mainly introduced in this paper the design and application of mechanical arm, through the mechanical arm of the man-machine interaction pattern, using pneumatic balance control system, automatic accompanying technology and electric technology, such as clamp solves the problems in the process of tire assembly, improve the efficiency of tire assembly and automobile assembly line level of automation, the value for popularization.
Key Words: Mechanical Arm; Pneumatic Balance; Electric Clamp; Automatic Accompanying
1 背景
輪胎是在各种车辆或机械上装配的接地滚动的圆环形弹性橡胶制品。通常安装在金属轮辋上,能支承车身,缓冲外界冲击,实现与路面的接触并保证车辆的行驶性能。
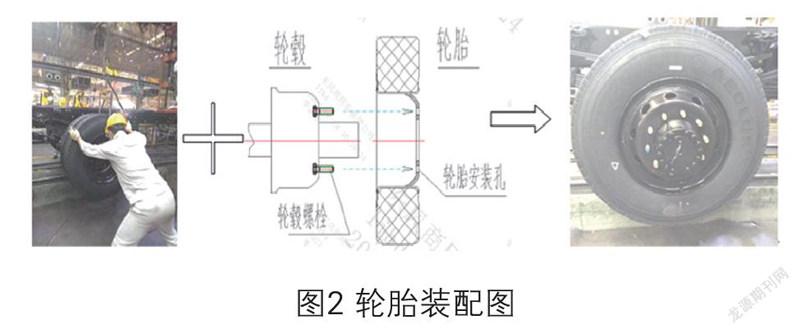
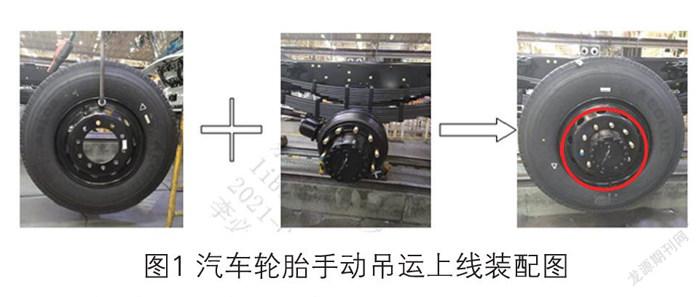
商用车轮胎装配:人工通过手拉天车用简易吊具把轮胎从轮胎输送线下料点吊运轮胎上装配线装配,轮胎装配作业主要是轮胎安装孔与轮毂的长螺栓对穿(一般对穿螺栓为6~10个螺栓),然后轮胎与轮毂贴合安装。见图1:
轮胎装配作业中存在以下几点问题:
1.1 手拉天车吊运轮胎,轮胎晃动大,运动精度低,轮胎对轮毂作业磕碰严重,造成轮胎、轮毂表面油漆划伤质量缺陷。
1.2 轮胎对轮毂困难,轮胎吊运晃动大,作业强度大。
1.3 轮胎对轮毂作业需要把轮胎孔安装至车轮毂的螺栓上,由于轮胎吊运晃动大及吊运的轮胎不能随意旋转,轮胎装配作业轮胎的螺栓孔与轮毂长螺栓对穿作业困难。见图2:
1.4 轮胎与轮毂贴合度不好,使轮胎螺栓拧紧力矩失真,造成汽车轮胎在行驶中轮胎跑掉现象,危险性大。
2 轮胎装配机械臂设计实施
商用车轮胎外形尺寸范围∮780mm×260mm ~∮1260mm×400mm,重量不大于300kg。
轮胎装配工艺流程:从轮胎输送线上拿取汽车轮胎,然后把轮胎移至汽车装配线与汽车轮毂进行装配。
轮胎装配机械臂的组成和结构
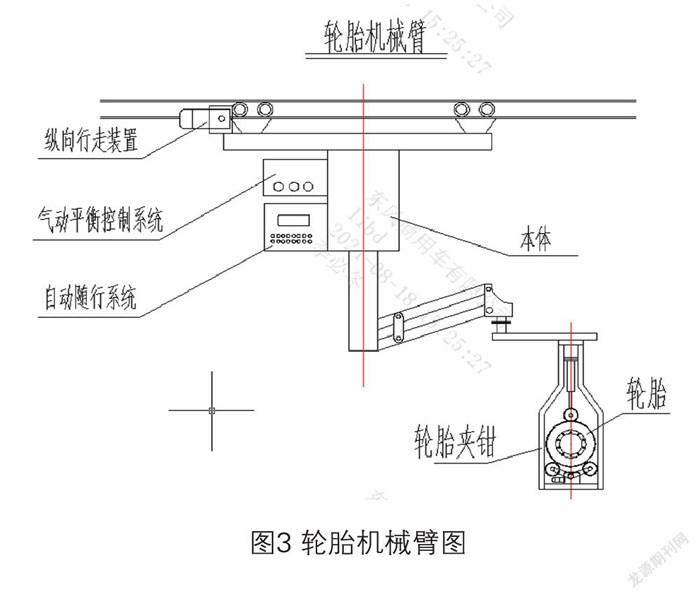
设计一个机械臂,机械臂采用人机交互使用模式,机械臂由本体、轮胎电动夹钳、纵向行走装置、气动平衡控制系统、自动随行系统组成,采用悬挂移动式安装结构,悬挂系统可沿汽车装配线长度方向来回自动移动。见图3:
工作原理:
人工手持机械臂打开电动夹钳从轮胎输送线下料点夹持轮胎,夹持好轮胎运送至轮胎装配工位处,然后开启自动随行功能,保持机械臂与装配线自行同步随行模式进行轮胎装配作业,然后调整气动平衡系统实现轮胎与轮毂贴合,然后使用夹钳旋转轮胎,实现轮胎安装孔与汽车轮毂螺栓对穿,最后松开夹钳,机械臂自动归位至轮胎取料位置。
2.1 本体
本体由硬臂、关节回转轴、平行四连杆臂、工艺臂、调整臂组成, 本体上端与纵向行走装置连接,下端与轮胎电动夹钳连接,可实现轮胎装配过程需要的上下移动和旋转运动。
机械臂本体为硬臂旋转结构型式,由两个关节回转轴组成,可旋转360℃,并任意角度可调。平行四连杆臂为平行四连杆结构,通过平衡气缸的作用实现机械手的上下升降,工艺臂通过回转连通与调整臂末端连接,下端通过法兰盘与电动夹钳相连接,刚性手臂可使机械臂带轮胎越过障碍,满足轮胎装配作业。
2.2 轮胎电动夹钳
轮胎电动夹钳有钳体、夹持装置、电动旋转装置三部分组成,夹持装置夹持轮胎,通过旋转装置使夹持的轮胎随意旋转,实现了轮胎孔与汽车轮胎螺栓快速对穿。见图4:
2.2.1 夹持装置
采用气动夹持轮胎,由气缸和钳爪组成。
夹钳设计:根据轮胎的尺寸和重量,设计夹钳
夹持范围∮780mm×260mm~∮1260mm ×400mm轮胎夹持,采用直径60气缸,行程600mm。
夹持力F夹=气压×缸径=187Kgf>轮胎歪斜倾倒力F倾 最大150Kgf。
2.2.2 电动旋转装置
由电机减速器、电控、钳爪、传动系统组成,采用电机驱动,能360度旋转,即控即停。
電动旋转装置设计:其负载按照单个轮胎重量(系数f=1.5倍)240kg计算选型电机减速器:
驱动功率P=T×n/9550=0.113Kw
根据计算结果对照SEW减速器规格型号选用0.12Kw电机减速器可满足设计要求。
2.3 纵向行走装置
纵向行走装置由驱动电机减速器、摩擦轮、轨道、压紧装置组成。机械臂行走时,接到信号压紧装置压住电机减速器上的摩擦轮与轨道接触进行移动,到位后压紧装置松开,摩擦轮与轨道脱开,机械臂运动停止。
2.4 气动平衡控制系统
气动平衡控制系统:具有全行程自动“漂浮”功能,可实现不同重量物料的重力平衡状态,适用于物料的精确移载操作,空载、满载及处理不同工件时,系统可感知其重量变化,并实现载荷在三维空间中的浮动状态,便于精确定位,全程平衡便捷地实现工件的搬运、定位、装配等操作。
气动平衡控制系统设计:
负载设计:根据轮胎的重量和机械臂本体自重,合计重量600kg。
工厂条件:供气气压6~7kgf/cm2,气缸选型:缸径D,行程L。
F=S气缸面积×f供气压力 根据负载计算得出气缸缸径D=106mm
根据气缸规格选用缸径D120mm气缸,行程L400mm满足负载。
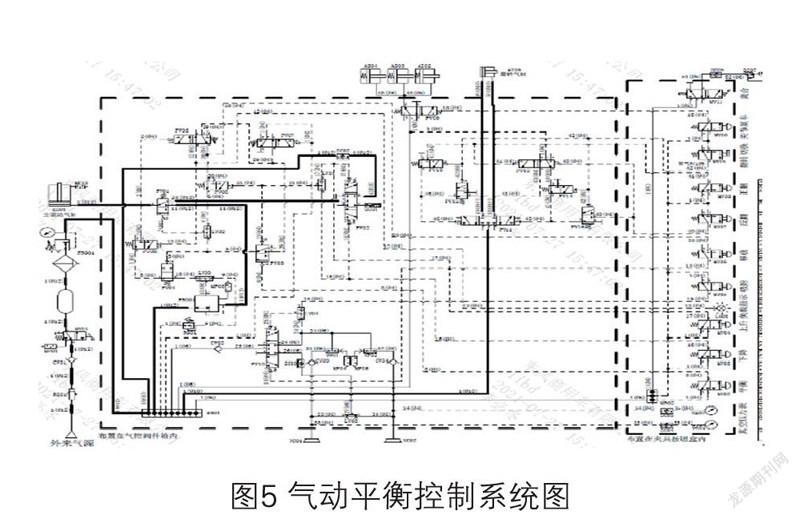
气路平衡系统设计:采用气动平衡阀、换向阀、逻辑阀、压力调节阀等组成平衡系统,空载、满载及处理不同工件时,系统可感知其重量变化,并实现载荷在三维空间中的浮动状态,自动“漂浮”功能,保证机械臂在空间任意位置平衡静态。见图5:
2.5 自动随行系统
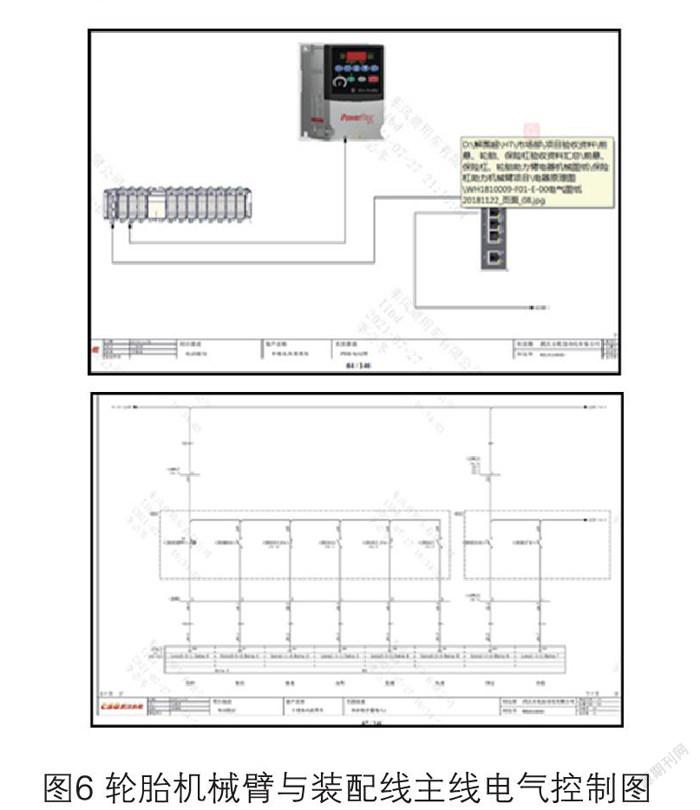
自动随行系统主要使机械臂工作时移动速度与装配线主线运行速度保持同步,分别由各自PLC+变频器控制机械臂和装配线的运行速度,两者之间通过4G无线通讯技术实现数据互联、程序互控。见图6:
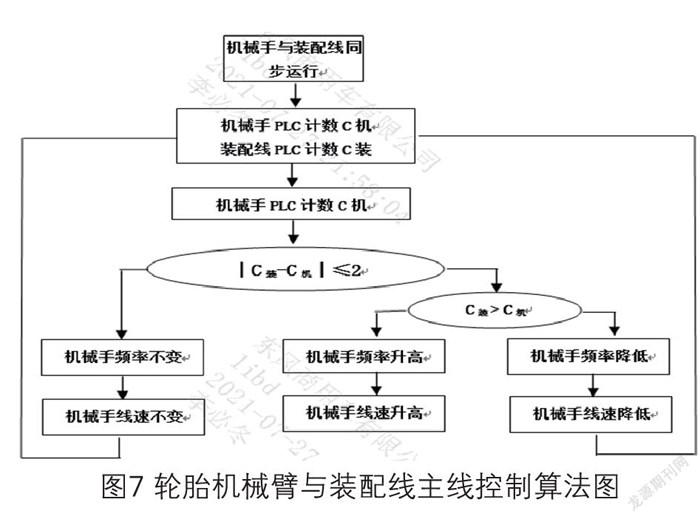
该随行系统控制方式以装配线主线运行速度为主,机械臂通过4G无线通讯技术采集装配线主线运行速度(并有线速校准系数),然后机械臂PLC读取装配线主线运行数据,同步控制机械臂运行速度,当PLC计数差超过2圈(位移差为0.1m)时,机械臂便自动提高或降低自身速度对装配线主线位移差进行补偿,同时在控制柜主频上显示机械臂和装配主线的瞬时速度。见图7:
3 实施后的效果
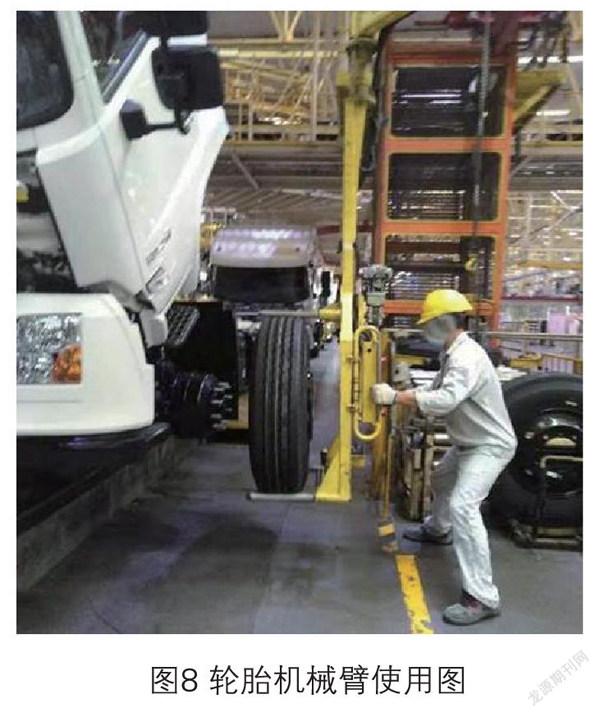
汽车轮胎机械臂的设计应用,消除了轮胎在装配中的晃动,通过气动平衡控制系统、自动随行技术及轮胎电动夹钳的应用,实现了轮胎精确走位,解决了轮胎装配作业轮胎的螺栓孔与轮毂长螺栓对穿困难作业和轮胎对轮毂作业磕碰问题,减少了汽车行驶中轮胎跑掉的现象,提升了汽车产品质量,轮胎部位的车次赔偿率下降了34%,降低了员工作业强度,轮胎装配效率提升了41%,同时使汽车装配线的自动化程度也得到了提升。见图8:
4 结束语
通过轮胎机械臂的设计应用,代替了人工轮胎装配作业,操作简便,装配快捷、定位准确,大幅减轻了员工的作业强度,提升了汽车装配效率。随着汽车制造业的快速发展,汽车装配线自动化程度越来越高,机械臂的应用越来越广泛。
参考文献:
[1]陶湘厅,袁锐波.气动机械手的应用现状及发展前景.2007-05-16 .
[2]王积伟,章宏甲.液压与气压传动.第二版.机械工业出版社.2005.
[3]明仁雄,等. 液压与气压传动[M]. 国防工业出版社,2003.
[4]陆鑫盛,周洪.气动自动化系统的优化设计[M]. 上海科学技术文献出李允文.
[5]工业机械手设计[M].北京.机械工业出版社.1996.
[6]肖立军,米学宁,石雷等.气动平衡助力机械手的原理及应用[J].制造业自动化20113.
李必冬
毕业于湖北汽车工业学院,学士学位,现就职于东风商用车有限公司车辆工厂,任技术主任工程师,高级工程师,已发表论文7篇,主要研究方向:混流、柔性汽车装配线的发展趋势及应用。
专家推荐语
王银明
东风设计研究院工艺院院长
研究员级高级工程师
论文主要论述装配机械臂作为典型装配助力机械,技术是成熟的,但在“自动随行系统”设计中运用4G网络技术跟踪主线运行速度达到同步运行,有一定的创新意义。本论文条理较为清晰,对于提升商用车轮胎装配质量、提高装配效率、改善人机工程均有较大帮助,有较好的使用价值。
猜你喜欢
科技与创新(2016年23期)2017-03-30
中国科技纵横(2017年3期)2017-03-29
山东工业技术(2017年4期)2017-03-28
求知导刊(2017年1期)2017-03-24
物联网技术(2017年2期)2017-03-15
农机使用与维修(2016年12期)2017-01-17
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
计算机教育(2016年7期)2016-11-10
现代电子技术(2015年17期)2015-09-23
物联网技术(2014年4期)2014-04-19