基于RBF神经网络和积分型高阶滑模控制的永磁同步电机位置伺服系统
2022-04-15 01:59都海波
安阳工学院学报 2022年2期
冯 攀,都海波
(1.安徽新闻出版职业技术学院,合肥 230601;2.合肥工业大学 电气与自动化工程学院,合肥 230009)
0 引言
伺服控制系统是数控机床等机电产品的重要组成部分,同时也是自动化生产不可或缺的条件之一[1]。电机控制系统对伺服驱动系统的性能起着决定性的作用,因此成为当下的研究热点。永磁同步电机(PMSM)具有许多优点,例如功率密度高、性能可靠以及结构简单等,随着永磁体成本的下降,其适用范围大大拓展[2-3]。可是,永磁同步电机也是一个复杂的非线性系统,多变量和强耦合问题突出,有着例如电流耦合、参数变化和外部干扰等众多不利条件,直接制约了系统性能的进一步提升。有些领域对系统性能存在较高要求。因此,设计出具有优良性能的控制系统成为研究的攻坚方向[4]。
对于一般的电机伺服控制系统,大部分采用PI控制,在现代控制理论取得不断发展后,一系列不同的控制策略相继提出,如自适应控制,滑模控制[5-7],模糊控制方法等[8-10]。在文献中,作者设计了一种自适应反步控制器,补偿了参数的不确定影响,使得PMSM实现了精确的位置跟踪。文献[12]为了逼近非线性函数,采用了模糊逻辑系统,同时,利用反步设计方法,设计出PMSM的自适应模糊控制。为了增强永磁同步电机伺服系统的抗干扰能力,文献基于最大转矩/电流原理,提出了自适应滑模控制器。文献考虑了参数和外界干扰的不确定性,提出了一种新的永磁同步电机模型,并采用预测电流控制滑模控制方案,极大改善了永磁同步电机驱动系统的动态响应。
神经网络是解决非线性、不确定性等问题的一种重要方法,并且它能够逼近复杂的非线性函数,具有良好的自适应能力。近些年来神经网络理论在多个领域获得研究,这为它在工业领域的应用提供了理论支持。目前,无论在理论或是工业领域,这种控制方法都得到了较大的关注[15,16]。本文主要使用基于神经网络的滑模控制方法来设计永磁同步电机伺服系统的位置跟踪控制问题。先是利用伺服电机的数学模型进行分析,再结合矢量控制,发现可以将电机的位置控制问题一分为二,即将其分解成二个子系统,其中一个为一阶系统,另一个三阶系统。一阶系统可以采用滑模理论设计一阶控制。而三阶系统的控制较难,本文首先设计一个高阶的滑模控制器,考虑到实际应用中,难以精确获取系统参数等信息,本文引入了RBF神经网络来辨识估计这些信息,结合高阶控制器提出了RBF-积分高阶滑模控制,得到了相应的控制器。经过理论上的分析,证明了这种控制器确实能够保证电机位置精确地达到理想位置。本文所提出的滑模控制器相对于目前已存在的控制方法具有如下优势:①实际情况下,难以获得系统的准确的系统参数和外部转矩等信息,本文提出的RBF-积分高阶滑模控制器可以有效估计这些状态;②由于外部的扰动是难以控制和无法避免的,本文设计的控制器本身具有良好的抗干扰性能[17]。仿真的结果也同样证实了这一点,该控制系统具有较强的抗扰性能。
1 永磁同步电机数学模型介绍
为了方便理论分析,建模时作出4条假设[18-20]:
① 转子和永磁体无阻尼作用;
② 磁路不饱和;
③ 忽略磁滞、涡流损耗的影响;
④ 空间磁场呈正弦分布。
由此得到PMSM的数学模型为:
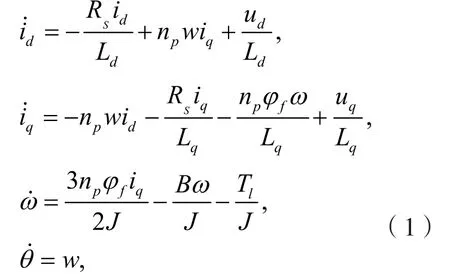
其中,ud,uq是定子绕组的d,q轴电压;id,iq是定子绕组的d,q轴电流;Ld是定子绕组直轴电感,Rs为定子电阻,Lq是定子绕组交轴电感;φf是转子上永磁体产生的磁势;np是电机的极对数,J为转动惯量;ω为电机转子的机械角速度,B为黏滞摩擦系数,θ为电机的转角,Tl为负载转矩。
2 永磁同步电机位置控制系统设计
2.1 基于矢量控制的永磁同步电机位置控制方案
分析永磁同步电机的数学模型可知,电流id和iq相互耦合使得线性化控制较为困难。解决的方法就是要使电机转速和电流能够解耦,一般采用的矢量控制方式。目前采用较多的方法仍是传统的PI控制方法,来实现对d轴和q轴的控制。而为了系统拥有更好的收敛性能和抗扰性能,本文的方法是滑模控制。
2.2 基于神经网络和滑模控制算法的控制器设计
PMSM位置伺服系统将对d轴电压和q轴电压分别设计相应的控制器,控制方案如图1所示。
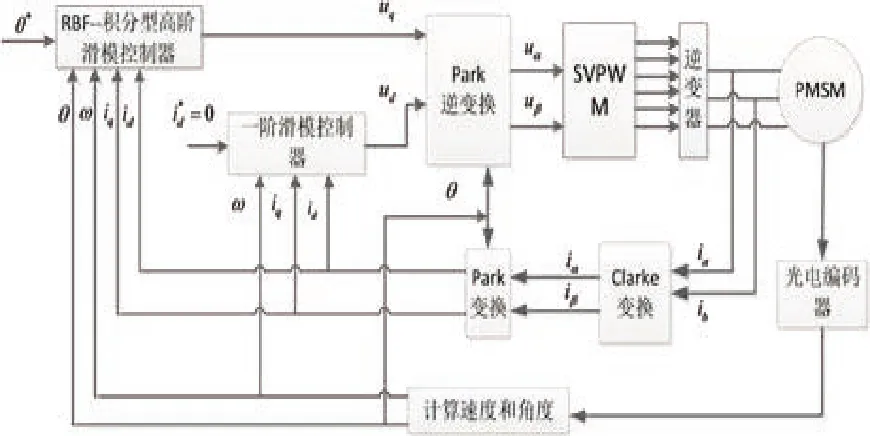
图1 基于滑模控制法PMSM位置跟踪系统原理框图
结合滑模理论,针对d轴电流,设计了一种一阶控制器,将使电流在有限时间到达0d轴电流时,使用滑模理论设计一阶控制器,电流将在有限时间内到达0。
结合滑模理论,针对位置控制系统设计了积分型高阶滑模控制器,使电机位置能够到达理想的位置。
2.2.1 电机位置控制器设计——一阶滑模控制算法
对于d 轴电流环,电压控制信号ud为输出,给定信号为输入。
定理1对于永磁同步电机位置伺服控制系统,当d轴电压ud设计为

永磁同步电机电流信号id将在有限时间到达,其中参数λ>0。
证明定义d轴电流误差状态为。由式(1)可得误差系统的状态方程

将(2)代入上式,则闭环方程有

选取李雅普诺夫函数为

沿系统(4),进行求导可得
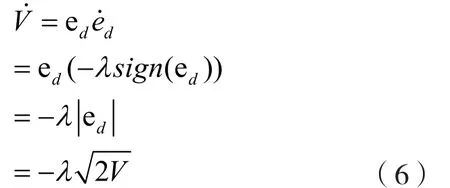
由于λ>0,可得ed在有限时间内达到0。
2.2.2 电机位置控制器设计——积分型高阶滑模控制算法
参考位置信号θ*,满足至少三阶可导。
定理2对于永磁同步电机位置伺服控制系统,当q轴电压uq满足
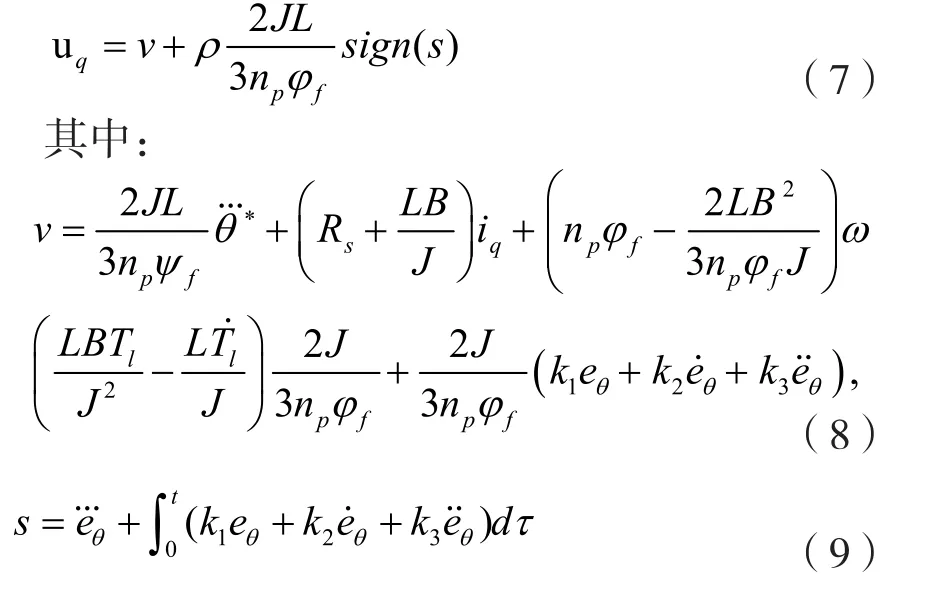
参数k1,k2和k3满足使闭环系统的三阶特征多项式为赫尔维茨稳定。此时永磁同步电机位置信号θ可收敛到期望信号θ*。
证明:位置误差状态记为。由PMSM的数学模型,得到误差的动态方程:
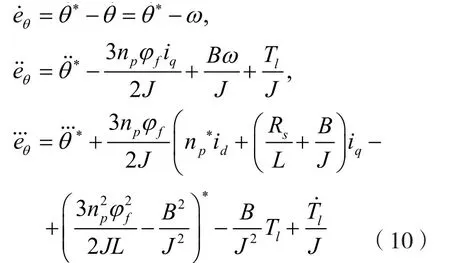
代入d轴控制器,分析知d轴电流将收敛到0。则,误差方程变为:
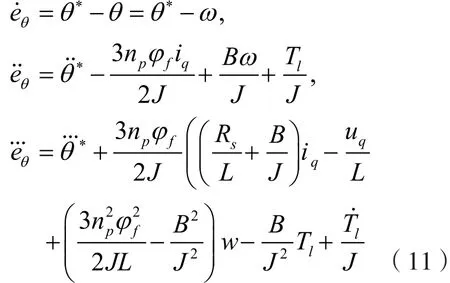
将(7)代入(11)中,则闭环系统方程变为:
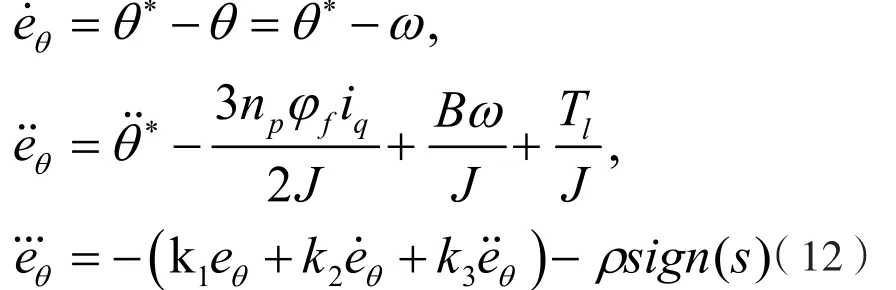
下面研究滑模面函数s,如果s能在有限时间到达0,并一直保持为0,则有

误差信号eθ将指数收敛到0。
选取李雅普诺夫函数为

结合系统(12),进行求导可得
由于ρ > 0,表明s将在有限时间内到达0。
2.3 基于RBF神经网络和高阶积分型滑模控制的q轴电压控制器设计
控制器(7)-(8)表明,至少需要知道系统的参数以及外部转矩等信息。然而在实际中,难以准确获得这些信息,所以只能通过辨识来估计这些信息。本节是利用神经网络来辨识的。根据式(11),可以得到
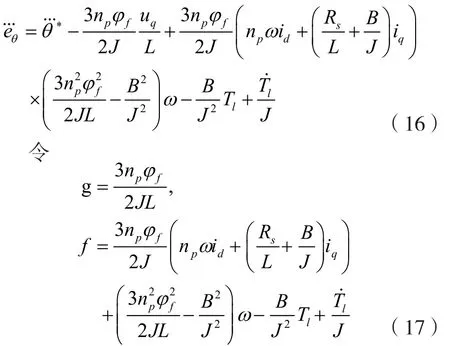
在实际中,g常常无法确定。
标称值记为

那么不确定性部分记为

式(16)可以重新写成
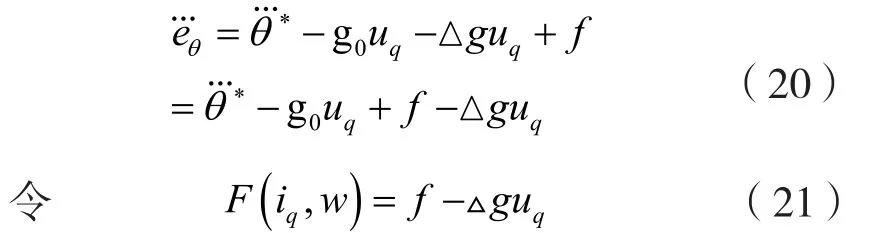
函数F具有一定的不确定性,这里利用RBF神经网络方法来逼近F。假设存在理想的权值W*使得

其中x=[iq,ω]T为输入,hF(x)为高斯函数,εF为逼近误差,且。则RBF神经网络的输出为

定理3对于永磁同步电机位置伺服控制系统,当q轴电压uq满足:
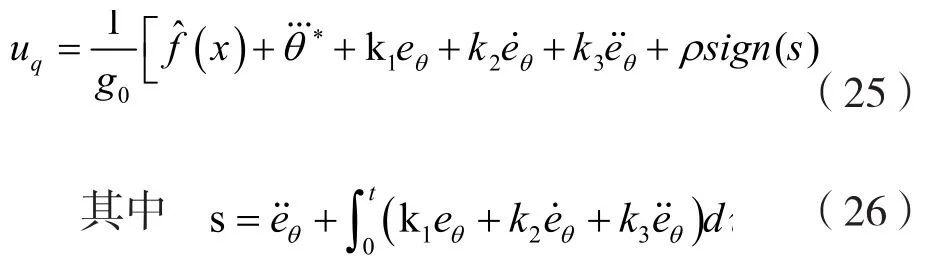


参数ki,i=1,2,3,和定理2相同。则永磁同步电机的位置信号θ可跟踪上期望信号θ*。
证明:将式(25)代入误差动态方程(20)中,则
由上式可知,积分型终端滑模面函数s满足

基于前述的神经网络假设,则有
则式(29)可以写成

取Lyapunov函数为

对L求导,并在自适应律(27)作用下可得
逼近误差εf是有界的,因此当增益ρ>εf时,则,那么,可以得到和s都是有界的。
然后,将证明s将在有限时间内到达0,而且达到后将一直保持在0。取Lyapunov函数为

其导数为
由于高斯函数hF(x)为有界的,因此为有界的,当增益时,则有

3 系统仿真分析
利用MATLAB对 PMSM位置控制系统仿真,并选择PI控制器作为参照实验,突出了本文控制器的优良性能。永磁同步电机各参数见表1。
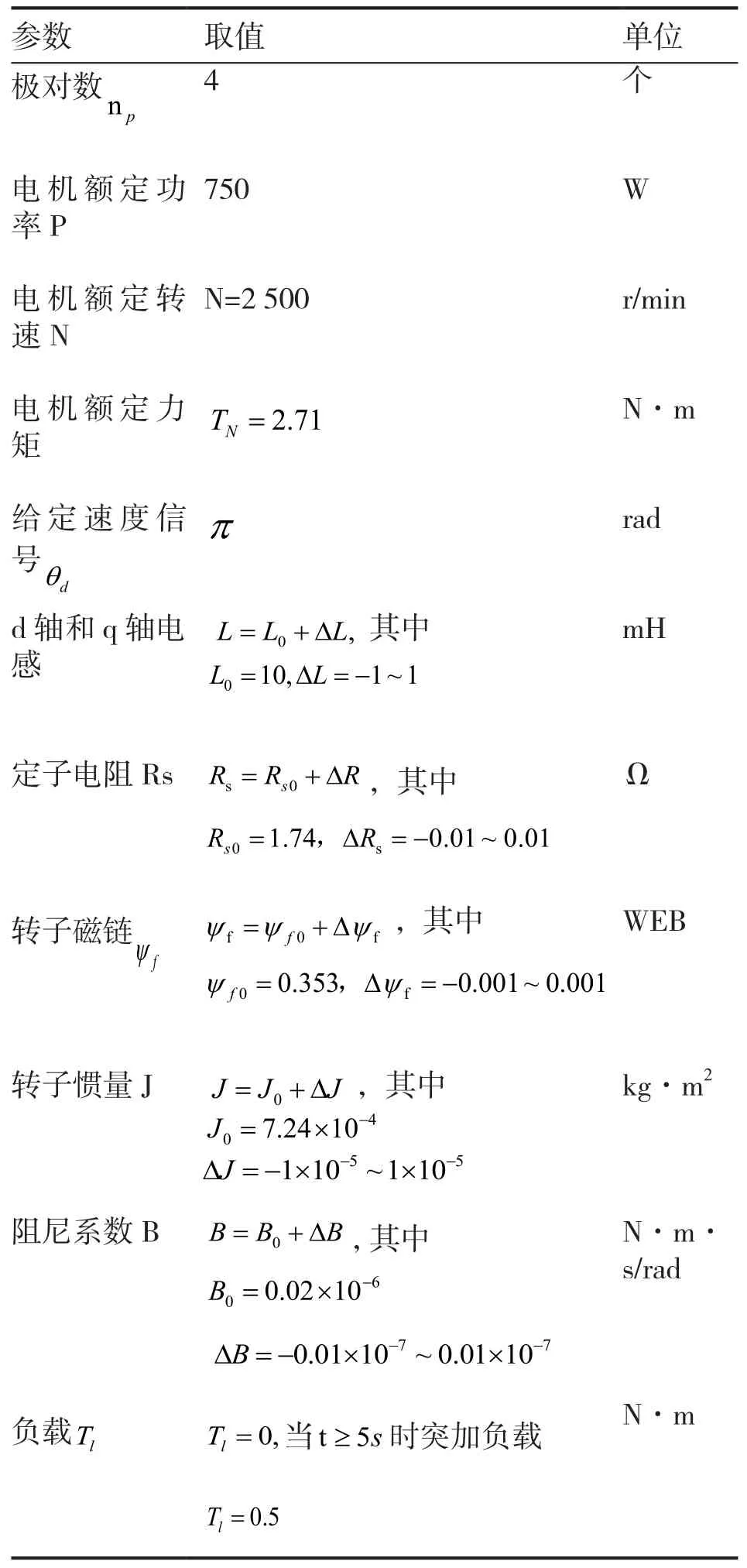
表1 永磁同步电机参数选取
仿真中,表2是一些不确定项参数
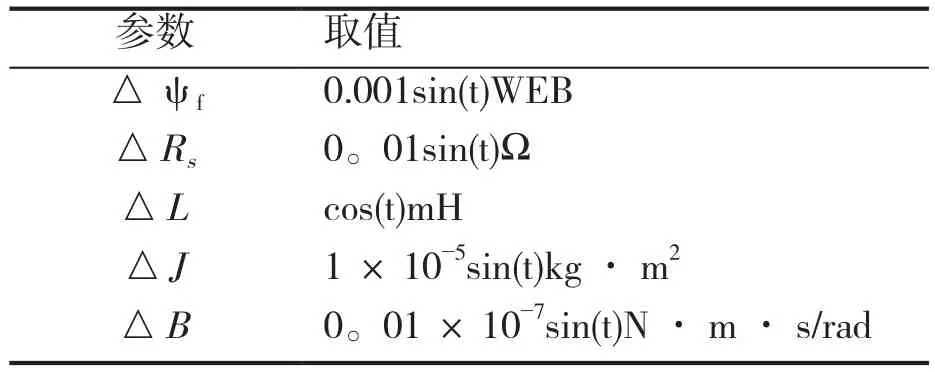
表2 不确定项参数选取
PI控制器的参数选取为:Kp=2,Ki=1.
高斯参数选取为:
cj=[-2-1012],bj=0。01,j=1,…,5,
d轴滑模控制器参数λ=5。q轴控制器参数选取为:k1=0.7,k2=0.3,k3=0.01。仿真结果如图2-图7所示。图2为转子位置响应,在t=5s时突加负载Tl=0.5N·m。由图2可知,本文提出的控制器这种加入负载后0.1s内即可恢复到相应位。而传统的PI控制方法,恢复到正常转速的时间较长。位置伺服系统的转子速度响应曲线如图3所示,在控制器作用下能够以更快的速度收敛到稳态,并且突加负载的时候,其速度的波动范围较小,而传统的PI控制方法会产生较大的速度波动。图4和图5为状态量id和iq的响应曲线。图6和图7为状态量ud和uq的响应曲线。由此可知,本文设计的控制器可以快速地跟踪上给定位置信号。并且在突加负载以后,引起的波动较小,误差状态能够快速收敛,具有良好的抗干扰性能。
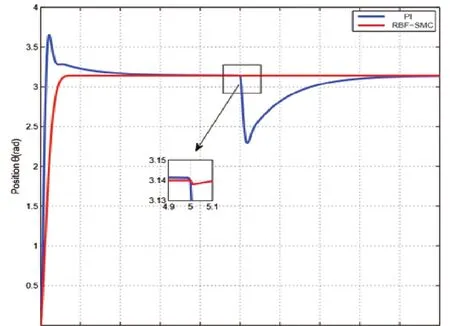
图2 转子位置响应曲线
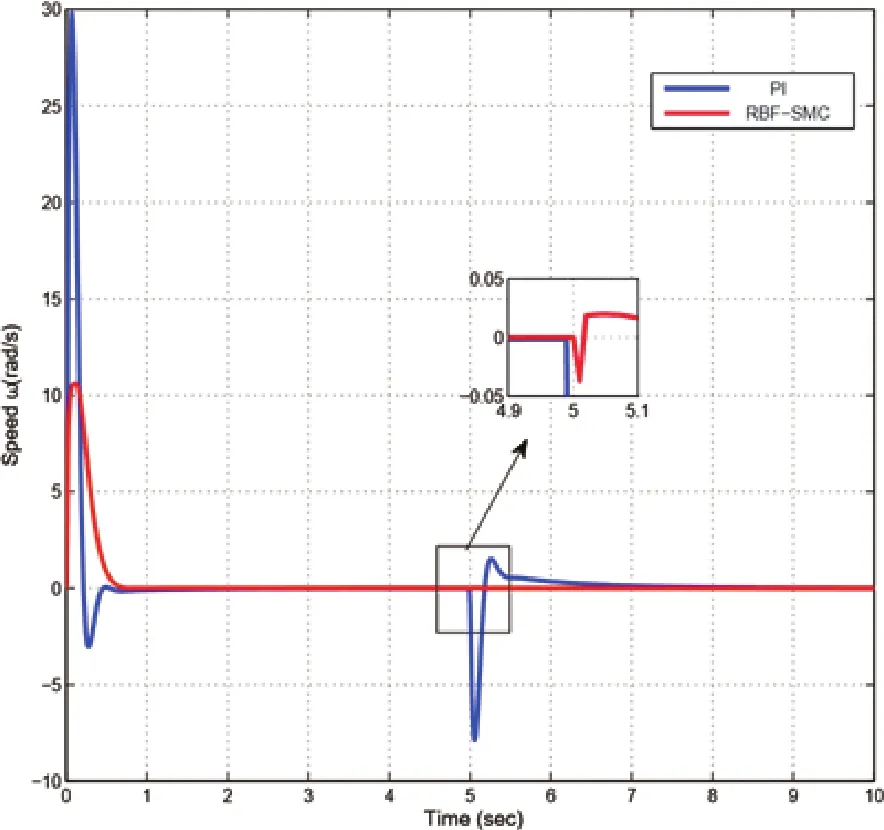
图3 转子速度响应曲线
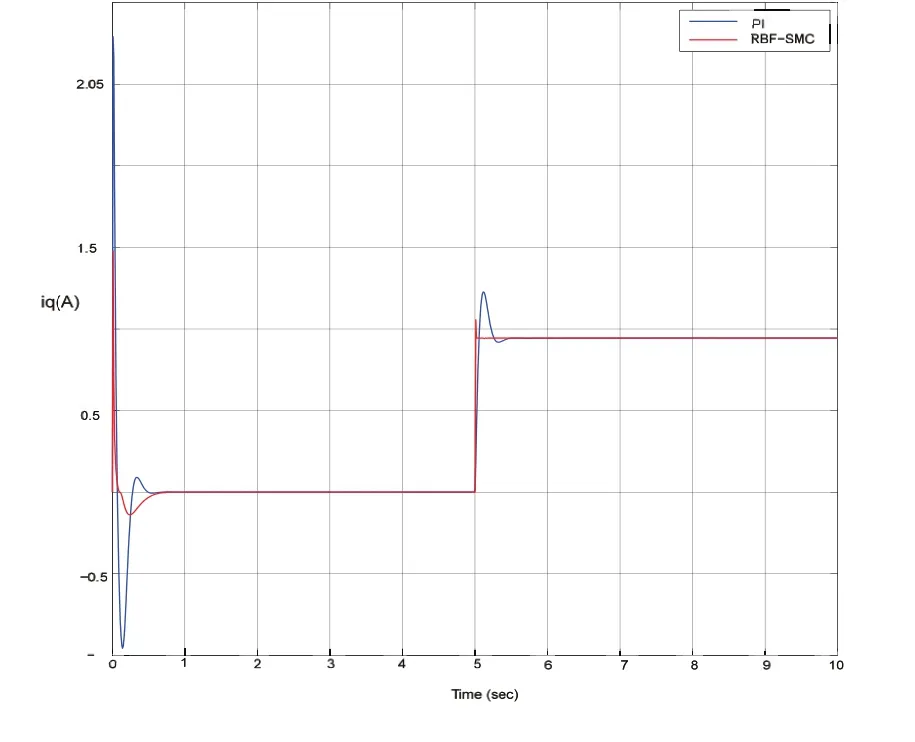
图4 q轴电流响应曲线
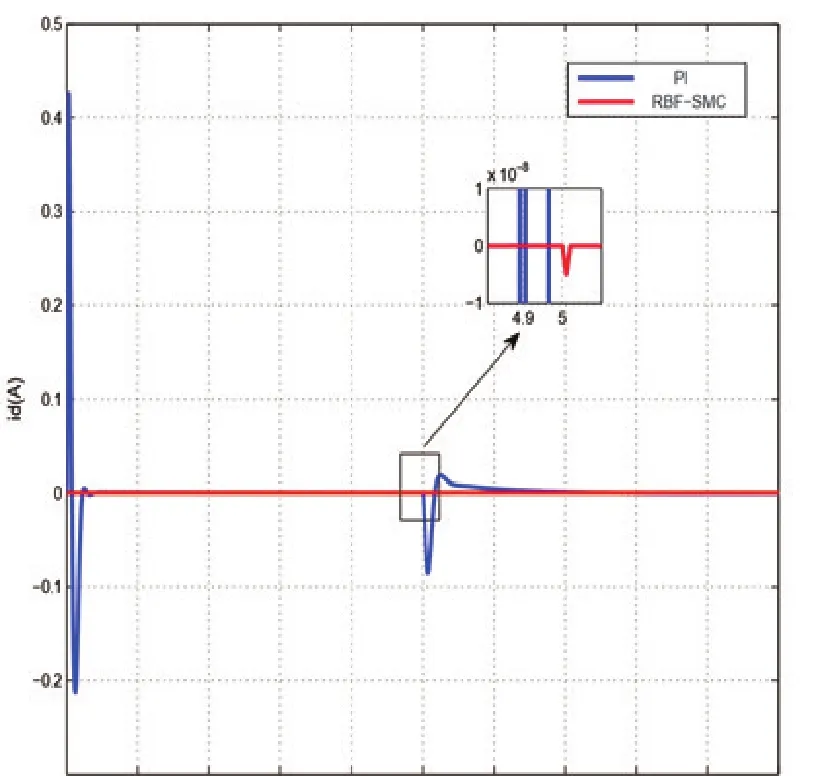
图5 d轴电流响应曲线
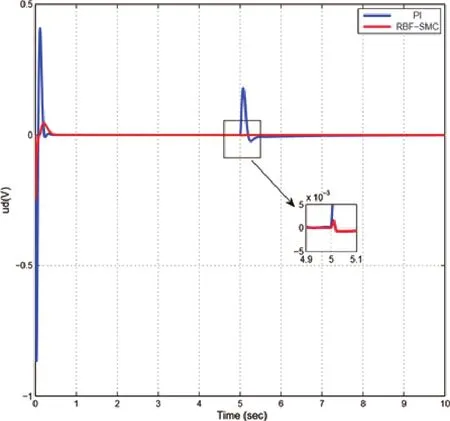
图6 d轴电压响应曲线
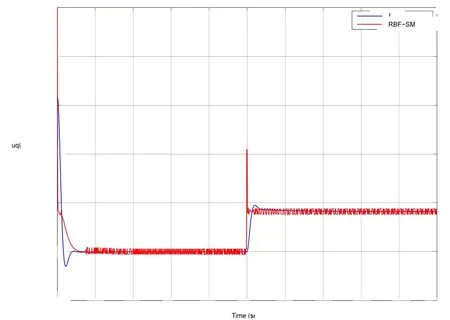
图7 q轴电压响应曲线
4 结 论
本文针对PMSM位置伺服系统,结合RBF-神经网络法,设计了高阶积分型滑模控制器,使电机能够快速到达期望位置。仿真的结果进一步证实了算法的有效性。
猜你喜欢
防爆电机(2022年3期)2022-06-17
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
北京航空航天大学学报(2016年4期)2016-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28