智能机器人在宁煤公司智能矿山建设中的应用
2022-04-21 02:45贾冬冬
中小企业管理与科技 2022年3期
贾冬冬
(国家能源集团宁夏煤业有限责任公司金凤煤矿,宁夏盐池 751504)
1 智能机器人的应用背景
为贯彻党中央国务院关于人工智能的决策部署,推动智能化技术与煤炭产业融合发展,提升煤矿智能化水平,促进我国煤炭工业高质量发展,2020年3月,由国家发展改革委、能源局、应急部、煤监局、工信部、财政部、科技部、教育部8 部委联合印发了《关于加快煤矿智能化发展的指导意见》,2020年11月25日,国家能源局、国家煤矿安全监察局响应8 部委号召,下达了《关于开展首批智能化示范煤矿建设的通知》,在71 座智能化示范煤矿中,国家能源集团宁夏煤业有限责任公司(以下简称“宁煤公司”)下属的枣泉煤矿、红柳煤矿、金凤煤矿赫然在列,3 座矿井一次性入选,足见宁煤公司对智能化建设的重视程度。目前,这3 座矿井的初步设计已经完成,其中有很大一部分涉及智能机器人的使用。2021年12月28日,工业和信息化部等15 部门联合印发了《“十四五”机器人产业发展规划》,更加明确了煤矿机器人使用的范围,宁煤公司结合现场井下工人作业场景,本着减轻工人劳动强度、降低工人作业危险度的原则,以解决实际问题为出发点,提出智能水仓清淤、无人飞艇巡检、自主喷浆作业等一系列的机器人需求,同时,未来智能机器人的建设能够有力推动国家相关政策的执行。
2 智能机器人的国内使用情况
目前,国内比较成熟的机器人主要侧重于巡检机器人、采煤机器人、掘进机器人、选矸机器人等,一些关键技术的实现,例如,无人驾驶等先进技术,也已经在准能集团黑岱沟露天煤矿地面卡车实现,经过改进,无人驾驶甚至已实现了自主避障。巡检机器人包括轨道式、轮式、履带式,可以搭载摄像仪或各类传感器,可实现照相、气体浓度探测、红外探测、自主避障等功能,该类机器人厂家众多,如神东大柳塔煤矿的山西戴德智能巡检机器人、同煤大唐塔山煤矿实地应用的中信重工第四代井下巡检机器人、神东补连塔煤矿上线的天津华宁皮带巡检机器人、大柳塔煤矿的危险气体巡检机器人、保德煤矿的液压开槽机器人等。
如果以上机器人都是单个系统使用,那么陕煤集团神木柠条塔矿业公司则将智能机器人做到了集群化研发,2021年7月,开发出了智能化综合管控与机器人集群协同调度平台,现有与在研地面及井下机器人近20 种,覆盖《煤矿机器人重点研发目录》相关机器人种类的40%以上,初步实现集群效应。
在宁煤公司中智能机器人也得到了广泛使用,其中金凤煤矿建成的武汉七环变电所轨道巡检机器人、红柳煤矿使用的自动焊接机器人、麦垛山煤矿带式输送机智能调速系统、灵新洗煤厂的智能选矸机器人,以及覆盖宁煤公司80%综采工作面成套自动化设备的使用,都为宁煤公司智能化建设作出了巨大的贡献。
3 宁煤公司智能机器人的设计思路
宁煤公司机器人的建设借鉴了全国范围内先进机器人的建设经验,对于应用成熟的机器人如选矸机器人、轨道巡检机器人等,直接“复制粘贴”到各矿井使用,在此基础上宁煤公司与中煤科工集团正在联合开发井下清淤机器人、主运输皮带无人飞艇巡检机器人、综采工作面电缆自动拖拽装置、巷道喷浆机器人共4 种较为先进实用的特种矿山井下用机器人。除综采工作面电缆自动拖拽装置目前市面上有基础产品外,其余的3 种均为全国范围内首创,如果研发成功,将填补市场空白。目前,项目正处于研发阶段,尚未投入使用[1]。
4 宁煤公司特色机器人概述
4.1 井下清淤机器人
自主化水下清淤机器人要具备满足自主淤积监测和自主清淤作业要求的探测系统、机械结构、智能控制系统和清淤系统,可实现在线自主淤积层厚度监测、水仓储水三维空间自主构建、水仓淤积程度和蓄水能力在线评估。研究基于光纤惯导、多普勒计程仪以及模型参考自适应位置推算的水下高精度自主定位技术,使当前及未来矿井机器人实现跨介质定位涉及的初始对准、覆盖式自主清淤作业、自主返航过程中的高精度定位和导航技术。自主化水下清淤机器人的设计不仅要求具备单体设备排淤能力,还需根据矿井实际清淤排淤工艺进行配套工艺设计及控制策略调整,从而满足大多数煤矿对于矿井水仓清淤排淤自动化的需求(见图1)。

图1 井下水仓清淤机器人设计图
该机器人是采用“刚性液压履带行走+液压动力驱动装置+高效矿用混凝土泵”组成的高效清仓机器人,将稠煤泥通过远程遥控柱塞泵输送到采空区。整机为全液压先导控制,为适应水仓工作环境,电力部分只包括:一台YBQ22KW 矿用隔爆型潜水泵用电动机、一台KXB120 矿用隔爆控制箱(外置电缆拖放装置)、矿用隔爆型电磁阀及矿用FYF/FYS30无线遥控装置。为保证机器人可将淤泥推到柱塞泵附近,机器人需要具有一定的轨迹规划能力,并设置清淤机器人水仓避碰的安全保障机制,因此,提出基于“同步自主避碰+高效清淤”并行自主行为优化方法,研究在非结构环境下自主化清淤机器人高效可靠清淤作业、自主返航等作业流程中自主避碰与轨迹规划方法,实现高精度局部环境探测和在线全局地图构建相结合的路径规划。
水仓清淤机器人作业过程中设置3 个工作区,每个工作区放置一台柱塞泵。柱塞泵固定预埋至水仓底部坑槽内,上面铺设格栅板,泵送的淤泥通过固定的管路泵送至缓冲搅拌设备。清淤机器人按照规划路径,通过程序控制,把每个工作区泵送设备周围的淤泥源源不断地推至泵送输入口。为提高工作效率,巷道每隔40 m 布置一组泵送装置,分为3 个工作区,机器人在某一工作区工作时,该泵开始工作。
机器人由淤泥铲装置、行走装置、液压动力系统、环境感知系统、无线遥控电气系统和卷缆收放装置等组成,按照设置自主或人工遥控完成清淤作业;清淤机器人驱动液压部分具有精准控制功能,避免机器人运动时出现不受控制的大幅度动作现象;推土机器人自带电缆收放功能装置;全液压驱动,整个系统要求采用开式回路,具备清淤装置控制油路、负载反馈式比例多路阀组成的油路(行走等功能油路);配置有激光传感器+双目视觉传感器,能够实现与推土机器人推铲的联动控制。
水仓机器人攻克的关键技术包括自主监测、自主定位、自主导航、自主避障及适应井下水仓恶劣环境的机械、电控技术[2]。
水仓清淤机器人如果研发成功,可以改变煤矿之前依靠人工穿上防水服,进入水仓用矿车或者铲车人工将淤泥清出的情况,可以节省5~10 名清仓人员,没有人员进入水仓作业,大大提高了安全性,同时,减少了局部通风机的使用,更有利于节能。
全程无人干预、自主检测、避障、清淤高度集成化的机器人设计相信在不久的将来一定能在煤矿井下水仓内发挥巨大的作用。
4.2 井下无人飞艇机器人
宁煤公司第二项开创性的机器人当属井下无人飞艇机器人(见图2),该飞艇采用蠕动飞行技术,蠕动飞行是利用仿生学原理,通过蒙皮材料与巷道顶部摩擦,艇体扭动、摆动形成动力,使飞艇缓慢沿巷道顶部攀爬飞行的一种飞行技术。机身内充满氦气,氦气比重低,约大气密度的1/10,1 m3约1 kg 浮力,可为飞艇提供升力。飞艇艇体外膜材料要容纳氦气,本身重量要低,要具有一定强度,弹性要好,不易刺穿,拼接后不漏气。聚四氟乙烯膜作飞艇氦气内胆,通过压铸加强条,使气囊充气前保持一定形状。多个气囊串联,中间使用可变柔性材料连接。中间连接可变柔性材料,具有电场作用下形变能力,通过对其施加电压,改变材料的弹性。反复有序的控制材料的形变,可实现飞艇的空中扭转或摆动、伸缩等动作。通过连贯的动作组合,实现飞艇的蠕动飞行。飞行器在井下无法避免尖锐的金属碰撞摩擦,聚四氟乙烯具有优良的化学稳定性、耐腐蚀性、密封性、高润滑不粘性、电绝缘性和良好的抗老化耐力。通过飞行器前缘加固设计和几何形状的优化,可有效避免飞艇主动碰撞引起的撕裂或刺穿。飞艇表面材料覆有统一朝向倾斜45°的纤毛,艇体在伸缩蠕动时,纤毛充当棘爪,钩挂岩面,使艇体移动。通过薄膜内贴沉薄膜天线,使用飞行器可与周边近场通讯设备进行信息交互,并高效地存储利用剩余能量[3]。
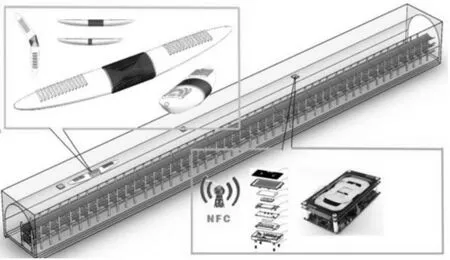
图2 井下无人飞艇设计图
该飞艇可实现全自主巡检功能,包括自主起飞、降落、侦检、传输等功能。机身搭载摄像仪及气体分析设备,可实现远程拍照、远程气体分析及粉尘浓度测定,代替工人在布满粉尘的巷道内巡检,飞艇经过通讯基站信号覆盖范围时,将现场情况的照片及传感器数据通过网络传递到指挥中心,并可对采集的飞行、扫描等数据进行分析,为决策提供数据支持。系统支持多媒体形式发布信息,能以不同的模式按照区域显示态势、文本、表格和音视图像信息。
无人飞艇攻克的关键技术主要有:自主起飞、巡检、远程监测、抓拍、信号传输及外皮材料的选用。
该飞艇设计在红柳煤矿主斜井带式输送机上巡检使用,设计续航时间为1 h,续航里程不小于1 000 m,可实现对主运输带式输送机连续巡检。该技术是首次应用到井下,如果能够成功使用,可以替代人工巡检,每天减少3 名巡检人员,将巡检人员从煤尘飞扬的环境中彻底解放。
4.3 井下喷浆机器人
煤矿井下喷浆作业时,喷浆料用混凝土料喷到巷道壁上时会大幅度回弹,喷浆机搅拌过程中也会扬起大量的水泥灰,造成空气极度污浊,吸入的混凝土颗粒对人体危害极大,极易造成职业病,喷浆机器人的研发就是为了解决这个难题(见图3)。

图3 喷浆机器人设计图
喷浆机器人是应用于井下巷道,能够多角度喷射混凝土的一种智能作业机器人,主要由行走机构、机械臂、喷浆工具端、驱动模块、智能感知模块、控制模块和通信模块组成。机器人的作业流程:首先通过人工对作业面进行作业区域范围规划,机器人机载激光雷达对已规划面进行激光扫描建模,构建作业面三维数字模型。其次计算机通过三维数字模型计算机械臂运动轨迹及作业面施工量,地面调度人员按施工量配送混凝土及调度罐车,罐车及泥浆泵车到位后,展开喷浆作业施工。最后喷浆作业施工结束,即可对已完成作业面进行激光二次建模,并将该数据上传数据中心。重复上述步骤,完成巷道喷浆支护掘进工作。具体指标:移动速度(空载)中最大移动速度1 m/s;喷浆回弹率低于20%;连续工作时间不低于3 h。
该机器人攻克的关键技术包括:喷浆臂运动轨迹计算、三维自主建模、自主计算喷浆用量。该机器人率先全套在枣泉煤矿设计使用,如果能够实验成功,可以减少2~3 名喷浆人员,只留2~3 名上料人员在后巷补充上料即可,喷浆总作业人数可以从原来的6 人减少到3 人。
4.4 其他先进技术的应用
除了以上机器人外,宁煤公司计划使用捡矸机器人、主运巡检机器人、综采工作面电缆自动拖拽装置、综采工作面沿空留巷挡矸支架、综采智能化开采控制技术、智能掘进技术、高低压开关柜“五遥”功能改造、基于UWB 技术的精确人员定位技术、5G 车辆无人驾驶、副立井提升系统电梯智能化改造、综采工作面TGIS 透明开采技术、智能安检、智能采暖、智能供水、智能通风、智能润滑以及大量机房硐室无人化改造等先进技术。本次智能化建设覆盖面广、涵盖专业多、改造技术多样,能够大幅度提高煤矿智能化水平,为3 个国家示范矿井达到中级标准提供支持。
5 结语
煤矿井下机器人的广泛使用,响应国家政策,能够大幅度替代工人从事危险作业,相信不久的将来我国会出现一大批更先进更智能的产品,形成一个以煤矿机器人为核心的产业链,持续不断地推动煤矿行业的蓬勃发展。
猜你喜欢
湖南工业职业技术学院学报(2022年3期)2022-12-06
建材发展导向(2021年19期)2021-12-06
世界有色金属(2020年8期)2020-12-10
科学技术创新(2020年22期)2020-08-11
四川水利(2020年1期)2020-03-11
建材发展导向(2019年7期)2019-11-29
太空探索(2016年12期)2016-07-18
百科探秘·航空航天(2015年12期)2015-11-07
百科探秘·航空航天(2015年11期)2015-11-07
百科探秘·航空航天(2015年10期)2015-11-07