
基于组合优化算法的拼接子镜组件一体设计
2022-05-07 03:31杜一民高雁许博谦张春悦匡也
光子学报 2022年4期
杜一民,高雁,许博谦,张春悦,匡也
(中国科学院长春光学精密机械与物理研究所中国科学院空间光学系统在轨制造与集成重点实验室,长春 130033)
0 引言
随着空间观测需求的发展,对空间光学遥感器的要求越来越高[1-5]。反射镜组件是空间光学遥感器中最重要的部件之一,反射镜的面形精度与稳定性直接关系到光学系统的成像质量。为了降低反射镜支撑、加工、装调、检测难度,保证面形精度,需对其进行轻量化设计以减轻结构重量[6-8]。
欧洲航天局研制的Herschel 远红外望远镜Φ3.5 m 主镜的镜面厚度为2.5 mm,镜体重量为210 kg,面密度为21.8 kg/m2,采用双足支架柔性支撑结构,面形精度RMS 值优于2 μm[9];Xinetics 公司研发的Φ510 mm反射镜的镜面厚度为2~4 mm,加强筋厚度为1.5 mm,反射镜的面密度仅为22 kg/m2,面形精度RMS 值为296 nm[10]。张雷、柯善良[11-12]等针对某空间相机的Φ210 mmSiC 反射镜应用拓扑优化、多目标集成优化方法进行超轻量化设计,并应用集成优化方法优化设计了一种串联双轴片式柔性支撑结构,反射镜面形精度RMS 值优于3.5 nm,组件重量仅为637 g,面密度达到16.9 kg/m2;邵梦琪等[13]针对微型遥感载荷采用第二代非支配排序遗传算法建立多约束多目标的参数优化模型,设计了一种折臂梁式柔性支撑结构,镜面的表面误差RMS 优于0.020λ。
传统轻量化方法一般以单一工件为优化对象[14-15],不能使整个组件真正达到重量最轻、面形精度最高的设计目标。由于子镜组件(Primary Mirror Segment Assembly,PMSA)促动器承载能力及镜体材料的严格限制,传统轻量化方法无法满足设计指标。因此,子镜组件的一体优化设计方法是符合重量要求的关键。组件级一体化设计势必引入过多的参数变量,导致系统运算量大,迭代时间长、不易收敛。为解决上述问题,设计了一种基于多岛遗传与梯度优化的组合优化算法,将其应用于拼接子镜的优化设计中。
本文旨在应用一体优化方法设计一种用于拼接式主镜、镜体材料为Zerodur 的子镜组件,通过拓扑优化方法确定子镜结构形式,基于反射镜背部三点支撑方案提出一种开槽横梁多轴柔性支撑结构。建立组件一体化多目标优化模型,对镜体、柔性支撑与背板的尺寸参数进行一体优化,通过工程分析方法及试验验证了子镜组件的性能,很好解决了反射镜组件设计中的全局寻优问题。
1 子镜组件结构设计
本文研究的拼接式反射镜由三块正六边形Zerodur 子镜构成,每个子镜外接圆Φ242 mm。由于子镜位姿促动器承载能力的限制,要求结构重量不大于2 kg。自身重力与5℃温变的分别作用下,子镜面形精度RMS 值优于λ/50(λ=632.8 nm),组件基频不小于200 Hz,主镜拼接后面形精度优于λ/40。为了保证子镜面形,考虑组件的动静态刚度与热稳定性[16],子镜采用背部三点支撑方案。
1.1 子镜拓扑优化
子镜的轻量化是在给定的设计空间内寻找合理的材料分布,在满足各种性能的前提下实现重量最轻设计。本文通过OptiStruct 中基于密度法的拓扑优化技术确定子镜背部的最佳结构形式。在工程实际中通常将反射镜的面形精度要求转化为镜面节点的约束。拓扑优化模型以子镜体积最小为优化目标,镜面节点位移为约束,材料分布密度为变量,其数学描述为
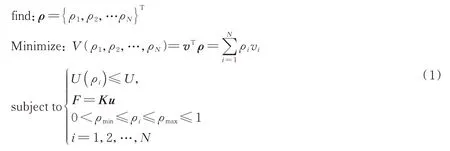
式中,ρi为单元的相对密度,是优化变量;N为设计取离散结构单元总数目;vi为单元体积;V为优化后设计区结构体积;F为边界载荷;K为结构总刚度矩阵;u为节点位移向量;U为镜面节点位移;U*为镜面节点位移约束;ρmax、ρmin分别为单元密度的极大值与极小值。
根据子镜支撑方案及设计要求,对子镜的材料分布进行拓扑优化,建立如图1(a)所示的有限元模型,约束支撑孔三个方向上的位移自由度,镜面与支撑孔侧壁为非设计区域,其余部分为设计区域。拓扑优化结果如图1(b),镜体材料分布呈杂乱状态,且在工程中材料密度不存在中间值,应对优化结果进行分析以适应工程实际:支撑孔附近单元基本得以保留,布置加强筋与支撑孔侧壁连接;子镜边角与支撑点间路径上均有单元保留,应设置加强筋连接;镜体边缘大部分区域被去除,应适度切除。子镜初始结构如图2,边角与支撑孔间通过12 条加强筋相连,边缘部分进行了修剪处理,减轻结构重量。

图1 子镜拓扑优化Fig.1 Topology optimization of mirror

图2 子镜初始结构Fig.2 Initial structure of mirror
1.2 柔性支撑结构
柔性支撑起到支撑镜体的作用,同时减小反射镜组件因材料热膨胀系数的不同引起的面形精度下降,柔性支撑结构应具备良好的动静态刚度保证反射镜的面形精度及稳定性,还要提供足够的柔性充分释放组件内部产生的热应力,减小温度变化对反射镜面形的影响,一般通过局部开槽或去除材料降低特定方向上的刚度。设计的柔性支撑结构选用比刚度较大的钛合金(TC4)材料以减轻结构重量,初始结构如图3,包括:衬套安装座、开槽横梁、多轴铰链、底座,由支撑横梁上的应力释放沟槽和多轴柔性铰链共同构成柔性环节。
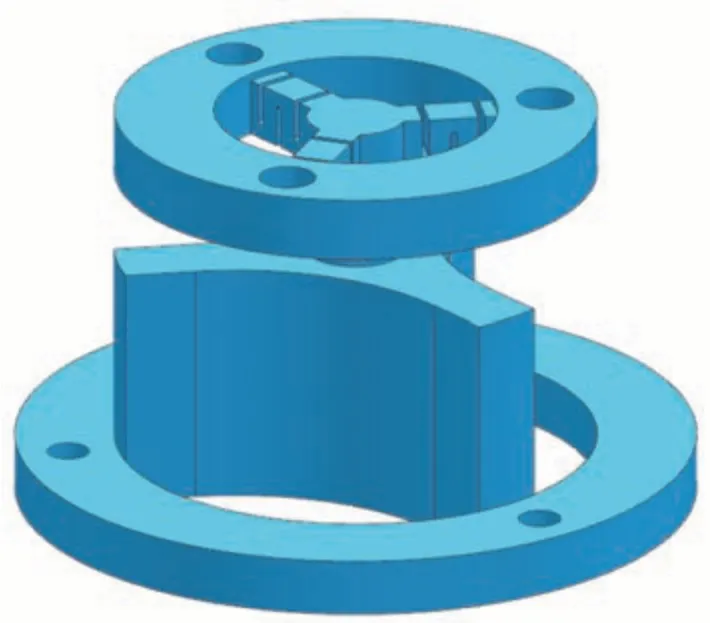
图3 开槽横梁多轴柔性支撑初始结构Fig.3 Initial structure of multi-axis flexible support with slotted beams
1.3 子镜组件初步设计
子镜组件由子镜、衬套、柔性支撑结构、背板构成,装配关系如图4。衬套采用与Zerodur 子镜热膨胀系数相同的殷钢(4J32)材料,通过环氧胶与反射镜支撑孔粘接,背板采用钛合金(TC4)材料,整个组件固定在子镜位姿促动器上。

图4 子镜组件初始结构Fig.4 Initial structure of primary mirror segment assembly
2 子镜组件一体优化设计
子镜组件安装在促动器上以调整子镜位姿,为了降低位姿促动器的负载,同时保证拼接式反射镜的成像质量,以子镜面形精度和结构质量作为衡量组件性能的依据,对组件结构参数进行一体优化设计。
2.1 组合优化算法
遗传算法借助于生物进化过程中“适者生存”的规律,模仿生物遗传繁殖机制,对优化问题解空间的个体进行编码及遗传操作,经过迭代从新的种群中寻找最优解。多岛遗传算法是对并行分布遗传算法的改进,具有优良的全局求解能力,适用于全局、非光滑、不连续的优化问题,但收敛速度较慢;梯度优化算法寻优过程可以表述为以一定的方向、一定的步长逐步接近优化点的过程。选定初始点X(0),按梯度方向S(0),以初选步长a(0)寻找一个新点X(0),使目标函数值f下降,并重复这一过程,直到获得最优解X*,即X(k+1)=X(k)+a(k)S(k)。梯度优化算法可以有效探索初始设计点周围局部区域,收敛速度较快,但非常依赖于初始设计点,容易陷入局部解。
为了减少系统运算量,加快收敛速度,规避局部最优解,提高优化效率和系统稳定性,设计了基于多岛遗传与梯度优化的组合优化算法,其策略为:通过多岛遗传算法对设计空间的敏感区域进行粗略定位,应用梯度优化算法对该区域进行精确寻优。该策略充分发挥了全局优化算法在整体设计空间遍历和梯度优化算法在局部区域收敛速度快的优势。基于多岛遗传与梯度优化的组合优化算法可以有效解决因参数过多导致的迭代步数多、目标函数不易收敛的问题。
2.2 结构尺寸参数
根据1.3 节中子镜组件的初步设计,进一步优化直接影响子镜组件面形和质量特性的结构参数,具体参数如图5,其中子镜的尺寸参数包括:镜体高度H、镜面厚度Tm、外壁厚度Tor、加强筋厚度Trib、支撑锥孔孔口直径Dhole、支撑孔壁厚度Thole、支撑孔中心到子镜中心距离Zhole、镜体边缘切除高度Htrim;柔性支撑结构的参数包括:横梁的开槽深度Sbeam、开槽间距Gbeam、开槽位置Lbeam以及多轴柔性铰链的直径Dh、长度Lh;背板的结构参数包括:柔性支撑结构安装面厚度Tf、平台安装面厚度Th、加强筋厚度Tr。
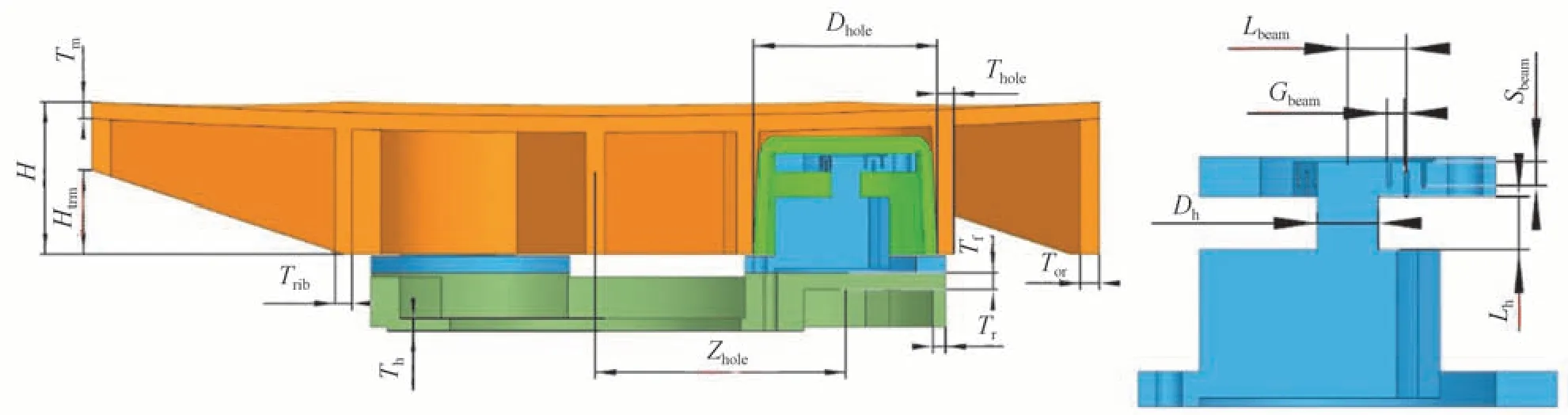
图5 结构参数示意Fig.5 Diagram of structure parameters
2.3 子镜组件一体优化模型
建立以子镜组件重量MASS 和Y向自重、5℃温变载荷分别作用下面形RMS 值最小为设计目标的尺寸优化模型。优化变量为2.2 节中结构参数。子镜位姿促动器承载最大负载2.5 kg,以组件重量MASS 不大于2 kg 作为优化的约束条件,设定子镜组件基频不小于200 Hz,结合工程实际及结构工艺性,确定参数尺寸的取值范围。子镜组件一体优化的数学描述为
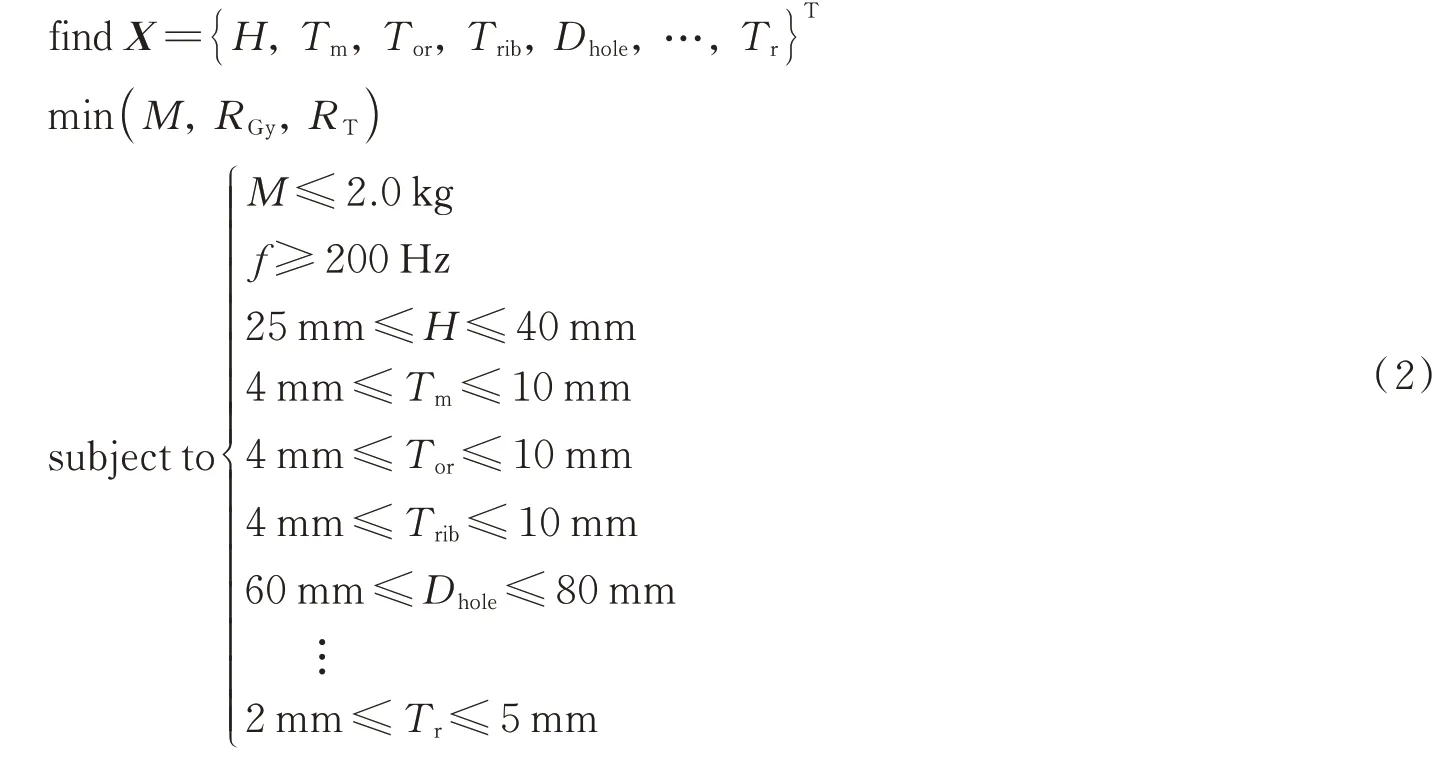
式中,M为子镜组件重量,X为优化变量,RGy为Y方向自重下面形变化的均方根值,RT为5℃温度变化面形精度的均方根值,f为子镜组件一阶频率。
优化流程如图6,子镜组件一体优化系统集成了自动优化、参数化建模、有限元分析、面形计算等功能。通过结构尺寸参数建立三维模型,应用有限元方法检测子镜组件的质量特性,分析其节点位移。根据分析结果提取镜面节点位移并拟合面形数据,计算子镜面形精度。

图6 子镜组件优化流程Fig.6 Optimization flow of primary mirror segment assembly
2.4 优化结果
在多目标优化问题中各个目标间存在一定的冲突,最优解不是单一的,而是一个最优解集,定义最优解判据:若x∈X,不存在另一可行点x'∈X,对于任意m,使得fm(x)≤fm(x')成立,且其中至少有一个严格不等式成立,则称x为多目标优化问题的一个最优解,所有最优解构成的集合为最优解子集。判据中:X为多目标优化的可行域,x为其可行解,m为子目标,fm(x)为子目标函数。
优化结果如图7,图中每一各点代表一个优化结果,根据最优解判据,筛选出最优解子集(图7 中圆点所示),从中选取重量级面形精度均较为理想的解。各参数及目标的优化结果如表1,优化后的子镜组件如图8(a),柔性支撑结构开槽间距为1 mm,可以提供足够的柔性。考虑结构工艺性,圆整各尺寸参数,增加圆角、倒角、凸台,局部区域部分去除排布较为密集的加强筋,重新构建子镜组件模型如图8(b)所示。
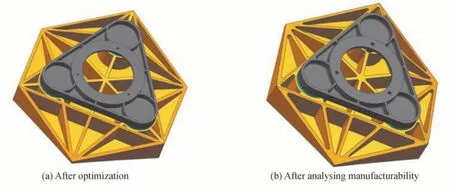
图8 优化后的子镜组件Fig.8 Primary mirror segment assembly after optimization
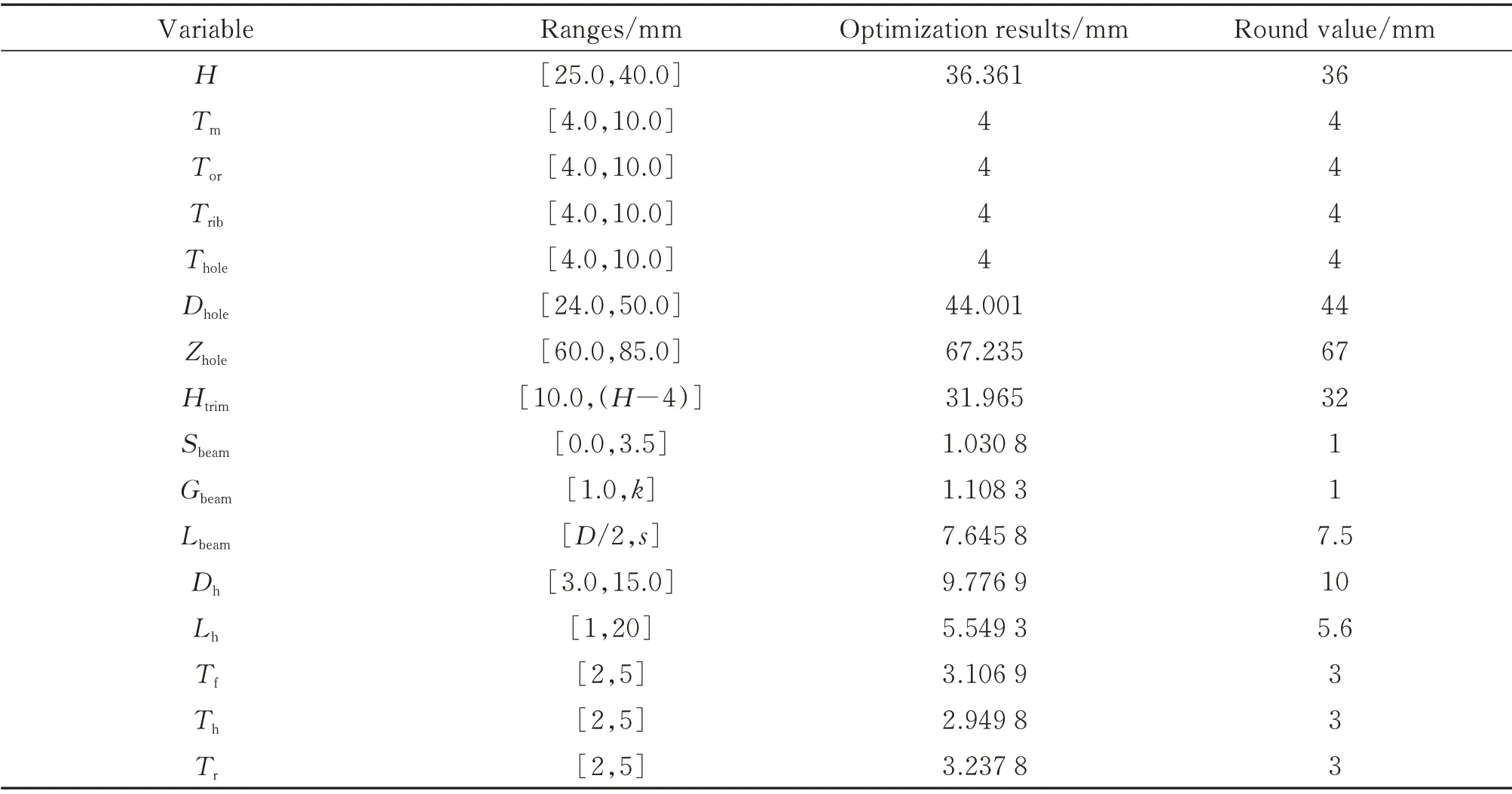
表1 子镜组件设计变量与优化结果Table 1 Design variables and optimization results of primary mirror segment assembly
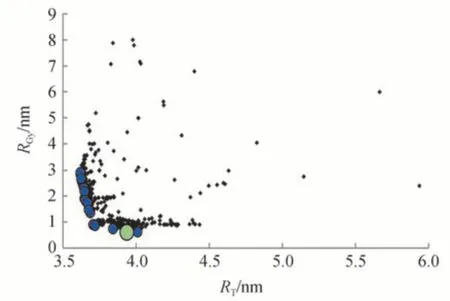
图7 子镜组件优化结果Fig.7 Optimization results of primary mirror segment assembly
2.5 组合优化算法分析
为评估组合算法的优化效率,应用多岛遗传算法对子镜组件进行优化设计,以此与组合优化算法进行分析对比,图9(a)为多岛遗传算法迭代过程,图9(b)为组合优化算法迭代过程。其中,组合优化算法共迭代394 次,多岛遗传算法迭代601 次。原因是优化设计模型引入较多的设计变量,导致收敛速度较慢,而组合优化算法在局部敏感区域可有效加快收敛速度。综上所述,相比其他算法,基于多岛遗传与梯度优化的组合优化算法求解能力更强,可以有效提高子镜组件一体优化设计的寻优效率。

图9 优化迭代过程Fig.9 Process of optimization iteration
3 子镜组件分析及试验验证
3.1 子镜组件工程分析
针对一体优化后的子镜组件开展工程分析,组件重量为1.74 kg,满足不大于2 kg 的轻量化要求,其中Zerodur 子镜结构重量1.04 kg,面密度达到27.32 kg/m2,轻量化率在68%以上。子镜组件的各项指标如表2所示,在X、Y、Z三个方向上自身重力载荷和5℃温变载荷分别作用下的面形精度均控制在5 nm 以内,Y方向作为相机的检测、装调时的重力作用方向,镜面变形的RMS 值仅为0.89 nm,远远小于λ/50 的设计要求。子镜组件X、Y、Z三个方向上的基频均在400 Hz 以上,满足不小于200 Hz 的要求。

表2 子镜组件工程分析结果Table 2 Engineering analysis results of primary mirror segment assembly
3.2 面形检测试验
子镜组件如图10,为了验证子镜组件的结构性能,按照试验要求,在室温条件下对子镜组件进行面形精度检测,面形检测干涉图如图11。面形精度的RMS 值为0.019λ,PV 值为0.154λ,面形精度优于λ/50,满足光学系统正常成像的需求,验证了子镜组件所采用设计方法的合理性和可靠性。

图10 子镜组件Fig.10 Primary mirror segment
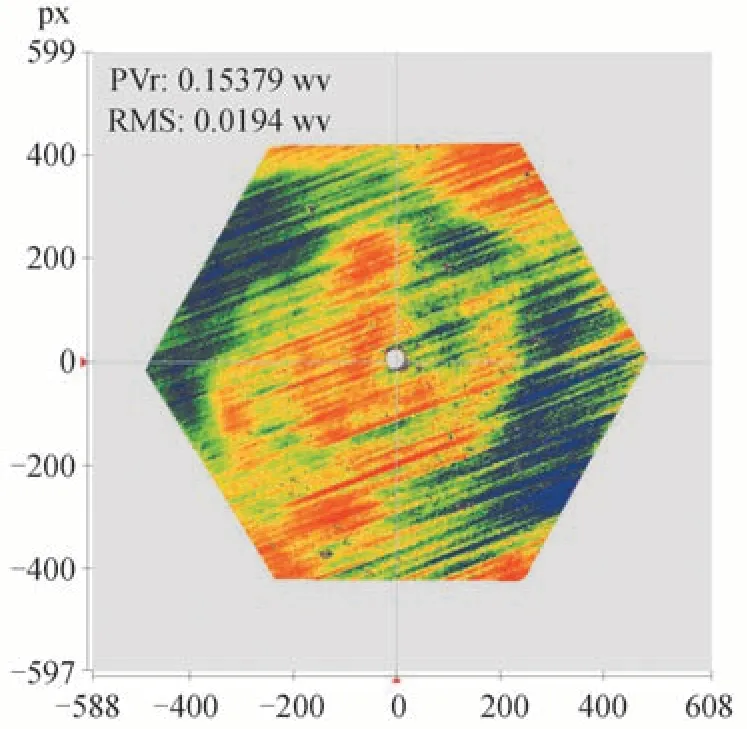
图11 子镜面形检测结果Fig.11 Surface figure error testing of primary mirror segment
4 结论
本文根据拼接式反射镜的性能要求,通过拓扑优化方法分析了子镜的材料分布,确定了子镜结构初始结构,基于反射镜背部三点支撑方案提出了一种开槽横梁多轴柔性支撑结构。为解决组件一体优化设计中引入变量过多,不易收敛的问题,设计了一种基于多岛遗传与梯度优化的组合优化算法。建立了以子镜组件结构重量和面形精度为目标的一体优化设计模型,优化后的子镜组件重量为1.74 kg,面形精度控制在5 nm 以内。最后对子镜的面形进行了检测,结果显示:子镜面形精度的RMS 值为0.019λ,满足优于λ/50 的设计要求,验证了子镜组件设计和分析的准确性,有效解决了反射镜的组件级一体优化设计问题。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
计算机应用与软件(2022年9期)2022-10-10
建材发展导向(2022年14期)2022-08-19
航天制造技术(2022年2期)2022-05-17
现代企业(2021年11期)2021-12-08
计算机与网络(2021年8期)2021-06-20
发明与创新·中学生(2021年4期)2021-04-20
舰船科学技术(2021年12期)2021-03-29
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
电子技术与软件工程(2016年24期)2017-02-23
