基于聚苯胺/聚乙烯醇水凝胶的柔性传感器信号解耦算法研究
2022-05-11 05:47李文杰李西宸张昌凡肖伸平
湖南工业大学学报 2022年3期
李文杰,孙 晓,李西宸,曾 成,张昌凡,肖伸平
(湖南工业大学 机械工程学院,湖南 株洲 412007)
1 研究综述
目前,柔性传感器在工业生产、海洋探测、环境保护、医学诊断、生物工程、宇宙开发、智能家居等领域得到了广泛的应用[1-2]。高柔韧性、高灵敏度和可多维信号测量的柔性传感器,可用于检测各类流体在管道内的受力情况,并为微细管道的测量、黏稠物的管道输送奠定技术基础。近年来,国内外研究者们已经取得了一系列相关的研究成果[3],术洋溢[4]制备出一种基于力敏复合材料的柔性三维力传感器,利用聚酰亚胺(polyimide,PI)与炭黑(carbon black,CB)材料混合制备出柔性力敏复合材料,并将其置于上下电极对之间,能够实现三维力检测,但其利用标定矩阵进行解耦存在一定的局限性。H.Choi等[5]提出了一种径向对称的3个气室柔性三轴力传感器,整体采用了内嵌式结构,通过测量每个气室的压力变化,以区分作用力方向,再通过信号解耦,准确获得三维力大小,具有良好的柔软度和柔顺性,但由于硅橡胶材料具有渗透性,空气容易渗透到气室中,尤其在连续工作条件下,空气的渗透无法避免,影响了传感器性能。正应力与剪切应力是评估黏稠食品输送管道系统运行状态的重要参数之一,压力测量对黏稠食品输送管道系统的安全运行和实时监测具有十分重要的意义[6]。李博等[7]研制了一种校准装置可调的带引压管腔的压力测量系统,可以满足特殊工作环境下的压力测量,但压力信号经过管腔时会发生畸变,影响测量精度。巩岁平等[8]对比了齐平安装与准无限长管两种动态压力测量装置,结果表明两种装置都会由于安装引起的小容腔对动态压力测量造成误差,且这种介入式结构易破坏管道流态的完整性,影响测量精度,在高压情况下还存在安全隐患。
信号解耦是柔性传感器制备的重要基础,因柔性传感器存在基材的参数个性化和小型化结构,对复合信号的多维度测量是一个难题。利用神经网络方法,对采集到的输出值解耦出传感器所受到三维力信息是常见的解耦方法之一[9]。其他的方法,例如通过定义中间参数,将三维力与感应单元的输出建立关系,通过实验求解多项式得到矩阵关系,从而实现传感器信号解耦,该方法的计算量较大[10-11]。在实际应用中,由于噪声的影响,基于材料和结构分析建立理论模型的解耦方法,往往精度较低,导致传感器载波信号的输入出现误差,无法完成任务。利用BP神经网络(back propagation)等智能算法进行信号解耦,可以在一定程度上避免噪声的干扰,但单个BP神经网络的训练收敛速度较慢,当输入样本量较大时更为明显。
本文设计了一种“三明治”夹层式柔性传感器,利用受力形变对压阻敏感的凝胶进行电压测试,利用变化的多维电压信号解耦得到受力的矢量信息。从理论角度分析了结构的可行性,并利用有限元仿真进行验证。同时设计了一种基于麻雀搜索算法(sparrow search algorithm,SSA)优化的BP神经网络信号解耦算法(SSA-BP),实现了信号的有效解耦。
2 传感器结构设计及分析
2.1 传感器结构设计
柔性传感器结构设计采用的是“三明治”夹层结构,柔性三维力传感器的爆炸图如图1a所示,柔性传感器具体尺寸如图1b所示。

图1 柔性传感器爆炸图及尺寸图Fig.1 Explosion and dimension diagrams of the flexible sensor
如图1所示,自上而下分别是聚二甲基硅氧烷(polydimethylsiloxane,PDMS)应力加载层,上层电极,(polyaniline/ polyvinyl alcohol)PANI/PVA水凝胶,下层电极。上下层电极层为柔性电路板(flexible circuit board,FPCB)电极,中间绝缘体将电极板分成5个部分,中间圆形部分作用为提供恒流电源,另外4块区域用作测量电压变化,并为传感器提供引线,同时也起到支撑传感器的作用。柔性压敏材料PANI/PVA置于上下电极板中间,在外力作用时,柔性压敏材料会发生形变,并间接改变内部导电材料的分布和基础状态,从而使柔性压敏材料的电阻发生有规律的变化。由于材料具有各向异性,当受到不同方向但大小相同的力时,电阻会体现出差别。利用上下电极板可以将电阻的变化转换为电压信号的变化。柔性传感器顶部突起结构是由PDMS做成的应力加载层,可以将加载力集中并传递到敏感单元,同时可以起到保护整个传感器的作用。
本文中柔性传感器的基底材料采用实验室自主制备的双网络聚苯胺/聚乙烯醇复合水凝胶,其具有良好的机械性能与良好的压阻效应。水凝胶断裂应力为1.32 MPa,断裂应变为310%,拉伸模量为0.79 MPa,在90%压缩应变下的应力为17.00 MPa,具有优异的拉伸压缩回复性能。导电性能优异,水凝胶电导率为8.14 S/m,拉伸循环应变值为200%,压缩循环应变值为70%,且均达到了5~11的高灵敏度,具有稳定的应变感应特性,满足实际应用场景对柔性传感器的要求。
2.2 有限元仿真验证
为了验证柔性传感器结构的可行性,课题组采用有限元分析工具分析传感器在正应力和剪切应力的作用下,柔性传感器的拉伸应力和压缩应力的分布情况。简化后的有限元模型由力加载凸起部分和柔性压敏材料组成,材料属性参数如表1所示。

表1 材料属性及参数Table 1 Material properties
利用HyperMesh软件对柔性传感器进行网格划分,其有限元模型如图2所示。

图2 传感器有限元模型Fig.2 Finite element model of the sensor
假设整个模型没有缺陷,并且忽略温度对材料性能的影响[12],对模型底部施加固定约束作为位移边界条件。施加大小为10 N的载荷,分别从Z、X、Y方向作用于加载层表面,记作FZ、FX、FY。图3显示了沿着半球边缘的预期应变分布结果。

图3 传感器受力的应变分布图Fig.3 Strain distribution of the force on the sensor under forces
如图3a所示,当柔性传感器受到法向力FZ的作用时,应变对称均匀分布在柔性压敏材料上。如图3b、图3c所示,当受到剪切力FX、FY作用时,由于沿着X轴或Y轴方向的剪切力在加载层上产生扭矩,因此应变不对称地分布在相应区域上。受力的近端由于张应力的作用被拉伸,而受力的远端由于压应力的作用被压缩。综上所述,有限元仿真从仿真角度验证了柔性传感器结构的可行性。
2.3 传感器的制备
柔性基底材料利用循环“冷冻-解冻”原理进行制备,制得单网络交联聚乙烯醇(PVA)基凝胶,在凝胶中嵌入苯胺(aniline,AN)单体,通过原位氧化法引发苯胺单体聚合形成聚苯胺(PANI)第二网络,最后浸没于单宁酸溶液中形成互锁交联网络得到双网络导电凝胶。柔性电极板选用厚度为0.5 mm的聚酰亚胺(polyimide,PI),然后在材料上沉积铜,作为电极。应力加载层采用Sylgard 184 PDMS,基本组分和固化剂按照比例配置完成后注入模具中,等到表面平整后,将模具放入烘箱,加热到85 ℃并固化30 min后脱模制成。最后将应力加载层、柔性电极板和柔性基底材料用导电银胶粘接起来,并加热固化,得到封装后的柔性传感器,如图4所示。

图4 传感器实物图Fig.4 Physical pictures of the flexible sensor
如图4所示,柔性传感器具有良好的柔韧性,可以有较大程度的弯曲。并且传感器的面积大小可以根据应用需求进行调整。
3 基于SSA-BP的信号解耦算法
3.1 算法原理
柔性三维力传感器的信号解耦问题是一个高度非线性问题,常见基于理论模型的方式,精度往往依赖于标定矩阵的大小,而通过一个固定大小的矩阵描述非线性映射是十分有限的。BP神经网络有较好的非线性拟合功能,在柔性传感器的信号解耦中得到了广泛的应用[13]。但由于BP神经网络初始阈值和权值是随机的,在大样本数据下训练往往耗费较多的时间和计算资源,且易陷入局部极值。因此,基于多方向矢量检测获得数据的特点,课题组拟通过麻雀搜索算法优化BP神经网络的方法对数据进行解耦。
麻雀搜索算法是薛建凯[14]提出的一种新型群智能算法,该算法受麻雀的觅食行为和反捕食行为的启发,具有搜索精度高、鲁棒性强的特点[15]。假设在D维空间中存在麻雀群,则其中第i只麻雀在空间中的位置由X来表示,Xi=[xi1,xi2, …,xiD],其适应度为f(Xi)=f([xi1,xi2, …,xiD])。以适应度作为麻雀觅食可能性的度量,选择适应度最高的麻雀作为麻雀种群的生产者,选择其他麻雀作为位置更新的参与者。生产者的位置将更新为

式中:t为现时迭代更新次数;j=1, 2, …,d,其中d为麻雀个体长度;itermax为最大迭代更新次数;为第i个麻雀在第j维的位置;随机值α∈(0, 1);预警值R2∈[0, 1];安全值ST∈[0.5, 1];Q为服从正态分布的随机数;L为1×d维且元素值全为1的矩阵。
当R2>ST时就表明附近并不安全,天敌发现了捕食者,所有麻雀都转移到其他安全的地方;相反,则表明附近安全,发现者将进行宽泛搜索。
加入者的位置更新为

式中:Xworst为第t次迭代更新全局最差位置;为第t+1次迭代发现者最优位置;A+为1×d维且元素随机赋值为1或-1的矩阵,且满足A+=AT(AAT)-1。
当i>N/2时,位置较差的加入者处于十分饥饿的状态,此时需要飞往其他的地方觅食。
SSA算法中的麻雀位置被设置为网络的权值和阈值,适应度函数被设置为网络输出和实际输出之间的误差函数,即

式中:(x1,x2, …,xd)为单个麻雀的位置;W为各隐含层权值;B为各隐含层阈值;N为隐含层数;FT为输出的真实值;FT′为网络输出值;η∈[1, 1.5]为适应度系数;len为样本大小。
网络的输入为柔性传感器的电信号(U1,U2,U3,U4),网络的输出为三维力(FX,FY,FZ),算法的流程如图5所示。

图5 算法流程图Fig.5 Algorithm flow chart
3.2 数据的获取及网络训练、测试结果
为了获取电信号与三维力对应的数据样本,采用了一套由三维力加载实验平台和连接计算机数据采集系统的校准实验系统,如图6所示。

图6 三维力加载实验测量系统Fig.6 3D force loading experimental measurement system
三维力加载实验平台可以给传感器提供法向力和切向力,并在应力加载层上以0.2 N为间隔施加一系列力,记录电压变化。计算机通过RS232接口记录所施加的标准力,电压由示波器(KEYSIGHT 34460A)测量,并同步采集到电脑。
通过实验获取了500组电信号和三维力一一对应的样本,部分样本数据如表2~4所示。

表2 Z方向标定数据Table 2 Z-direction calibration data

表3 X方向标定数据Table 3 X-direction calibration data
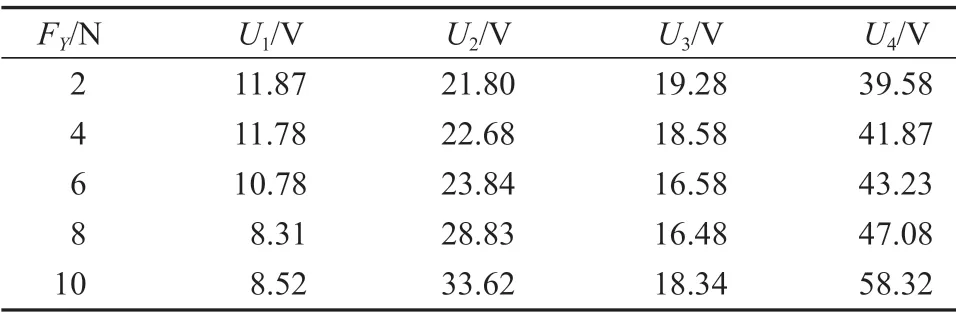
表4 Y方向标定数据Table 4 Y-direction calibration data
将数据在Matlab2017、Interi7-9750H的环境下运行。网络的隐含层数为1,节点数为5,学习率为0.01,最大迭代次数为100。图7为两种算法的训练结果。

图7 单一BP神经网络与SSA-BP训练结果Fig.7 Single BP neural network with SSA-BP training results
单一的BP神经网络在61次迭代后训练达到最佳位置,损失误差为1.8×10-5N,由SSA优化后的BP神经网络在19次迭代后训练达到最佳位置,损失误差为9.3×10-6N,训练结果表明,采用SSA算法优化的BP神经网络比单一的BP神经网络具有更好的收敛速度,精度有一定程度的提高。
在三维力的取值范围内随机生成了200组带有噪声的测试样本,通过对测试样本的绝对误差进行计算,能够得到网络泛化能力的强弱。单一BP神经网络测试结果如图8所示,结果显示FX的平均误差为0.008 N,最大误差为0.023 N;FY的平均误差为0.004 N,最大误差为0.009 N;FZ的平均误差为0.003 N,最大误差为0.014 N。

图8 单一BP神经网络测试结果Fig.8 Single BP neural network training results
SSA-BP神经网络测试结果如图9所示,结果显示FX的平均误差为3×10-3N,最大误差为5×10-3N;FY的平均误差为3×10-3N,最大误差为4×10-3N;FZ的平均误差为2×10-3N,最大误差为4×10-3N。通过分析可以得出,经过SSA优化的BP神经网络在3个方向上的力的绝对误差均小于单一BP神经网络测试结果,且方差也小于单一BP神经网络的测试结果。因此,可以得出SSA-BP神经网络的泛化能力以及抗干扰能力均优于单一BP神经网络的结论。


图9 SSA-BP神经网络测试结果Fig.9 SSA-BP neural network training results
4 结语
本文针对PANI/PVA各向异性的特性设计了一种“三明治”式整体层装柔性传感器,并基于各向异性材料力学原理,对结构在不同受力方向作用时进行了理论分析,且并利用仿真软件对结构进行仿真验证结构的可行性。柔性传感器由PDMS应力加载层、上下层电极、PANI/PVA构成。其中上下电极板与柔性压敏材料用于检测和输出信号,应力加载层用于集中并传递载荷,且起到了保护传感器的作用。最后,设计了一种基于SSA-BP神经网络算法并对所获取的传感器三维力电信号进行解耦。解耦实验结果验证了相对于单一BP神经网络算法,SSA-BP神经网络算法收敛速度更快、精度更高。在三维力的取值范围内随机生成了200组带有噪声的样本,测试结果表明,SSA-BP神经网络的泛化能力以及抗干扰能力均优于单一BP神经网络,能够更好地完成三维力的检测。
猜你喜欢
建材发展导向(2022年14期)2022-08-19
北京航空航天大学学报(2022年7期)2022-08-06
汽车工程师(2021年12期)2022-01-18
现代企业(2021年11期)2021-12-08
中学生数理化(高中版.高考理化)(2021年10期)2021-12-06
小猕猴学习画刊·下半月(2020年8期)2020-07-28
高考·中(2019年6期)2019-09-10
恋爱婚姻家庭·青春(2019年6期)2019-06-17
军事文摘·科学少年(2018年5期)2018-09-29
国外科技新书评介(2009年12期)2009-05-31