非线性多智能体系统的固定时间包含控制
2022-05-11 05:47唐朝君
湖南工业大学学报 2022年3期
余 湛,唐朝君,谢 挺
(重庆理工大学 理学院,重庆 400054)
0 引言
近年来,多智能体系统的协调控制一直是控制领域研究的热点。一致性问题作为协调控制研究的一个基本问题,受到了特别关注。如果系统中有多个领导者,相应的问题则被称为包含控制问题,它研究如何通过设计分布式协议驱使跟随者收敛到由领导者形成的凸包内。包含控制问题在军事和民用领域都具有广泛应用,并取得了许多有价值的成果[1-4]。
在一致性问题的研究中,收敛速度被公认为是评价一致性协议的一个重要性能指标。在大多数关于一致性问题的早期文献中,只有在时间趋于无穷时才能达到一致。为了提高收敛速度,一些研究者设计了有限时间的一致性协议。值得注意的是,有限时间一致性的收敛时间依赖于智能体的初始条件。由于初始条件通常不能预先得到,因此不能保证在规定时间内收敛。幸运的是,近年来,研究人员为了解决初始条件的限制,在一致性问题中引入了固定时间一致性协议。文献[5]研究了无向网络拓扑下的多智能体系统在固定时间内实现平均一致性问题,即固定时间平均一致性问题。文献[6]考虑了一般有向图下非线性多智能体系统的固定时间一致性。文献[7]研究了具有不确定性本质非线性动力学的一阶多智能体系统的固定时间一致性问题。文献[8]研究了在有向通信拓扑结构下,具有非线性动力学和不确定干扰的多智能体系统固定时间一致性问题。文献[9]研究了具有非线性动力学和有界不确定性多智能体系统的固定时间群体一致跟踪问题。文献[10]研究了非线性异构多智能体系统的固定时间领导跟随一致性问题。文献[11]针对有向网络拓扑结构,研究了具有切换拓扑和非线性动力学下的多智能体系统的固定时间包含控制问题。然而,以前的工作很少关注有向通信拓扑下具有未知干扰的非线性多智能体系统的固定时间包含控制问题。
基于上述原因,本文研究了有向拓扑下具有未知干扰的非线性多智能体系统的固定时间包含控制。结果表明,在存在未知干扰和有向通信拓扑的情况下,可以解决包含控制问题。此外,还得到了收敛时间的上界。
1 预备知识及问题描述
1.1 符号说明与图论
设R为实数集,λmin(A)和λmax(A)分别为对称实矩阵A的最小特征值和最大特征值。对于一个给定的向量x∈Rn,表示p-范数。表示集合X={x1,x2,…,xn}的凸包。若矩阵A的每个元素都是非负的,则矩阵A是非负的。若矩阵A的所有特征值都具有负实部,则矩阵A是稳定的。如果矩阵A是非负的,并且每一行都有单位和,则称矩阵A是随机的。
有向图G(A)={V,E,A},由顶点集V={1, 2, …,n}、有向边和邻接矩阵A组成,用于描述系统中智能体之间的通信拓扑。G(A)的一条边用(j,i)表示,这表示智能体i可以直接接收智能体j的信息。令邻接矩阵A=[aij]∈Rn×n;若(j,i)∈E,则aij>0;否则aij=0,其中aij表示权重。令度矩阵。拉普拉斯矩阵L=[lij]∈Rn×n,可以用L=D-A来表示。
1.2 问题描述
设多智能体系统是由m个跟随者和n-m个领导者组成的。跟随者与领导者的集合分别用VF={1, 2, …,m}和VL={m+1,m+2, …,n}表示。在文献[11]的基础上,设计智能体i的动力学为

式中:xi(t)、ui(t)、f(xi(t),t)、di(t)∈R分别为智能体i的状态、控制输入、本质非线性动力学和未知干扰。
定义1通过设计合适的协议ui(t),i∈VF,如果满足,则称系统(1)能够实现固定时间包含控制。其中Co(xL)表示由领导者的状态形成的凸包,而T表示独立于初始状态的固定时间。
为了推导出主要结果,给出以下假设。
假设1每个领导者都不能接受信号,对于每个跟随者,至少有一个领导者有通往它的有向路径。
注意:当满足假设1时,显然,拉普拉斯矩阵L可以写为

式中:矩阵L1∈Rm×m,矩阵L2∈Rm×(n-m)。
假设2存在一个正常数使得

式中:常数ki≥0,且。
假设3未知干扰di(t)是连续的,并且有上界dmax,即

假设4对于所有的i,j∈VF,存在常量pi>0满足pjaij=piaji。其中aij是与有向图G(A)相关的邻接矩阵的权重。
注意:如果有向图G满足假设4,则称图G满足细致平衡条件。该条件通常用于研究有向网络拓扑下多智能体系统的有限时间和固定时间一致性问题[12-13]。
引理1[14]对于任何向量z∈Rn,如果存在常数p>q≥1,则

引理2[15]如果满足假设1,则矩阵-L1是稳定的,那么矩阵是随机矩阵。
引理3[16]如果满足假设4,则矩阵L1P是正定的,且定义矩阵P=diag{p1,p2, …,pn}。
引理4[17]如果存在径向无界正连续函数,使得

其 中a,b>0,0<μ<1<v,则 称 系 统可以实现固定时间稳定性。此外,收敛时间可以通过来估计。
2 主要结果
为实现固定时间包含控制,提出以下控制协议:

式 中:α、β、γ>0,a<b,p<q,且a、b、p、q均 为正奇数。
后面的内容中,为简单起见,在不引起混淆的情况下有时省略参数t。令,

则有


定理1满足假设1, 2, 3, 4,且当控制参数满足以下不等式时:
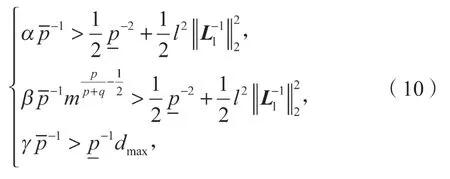
系统(1)可以实现固定时间包含控制。
证考虑如下Lyapunov函数:

根据等式(9)可以得到


根据假设2可以得到


经过简单计算,再由引理1可以得到


则有:



式中:


定理1给出了多智能体系统包含控制的充分条件,在有未知干扰情形下,系统(1)在固定时间内实现包含控制。对此,考虑一种特殊情形,对于不带干扰下的系统,智能体i的动力学方程如下:

定理2若满足假设1、2、4。当控制参数满足以下不等式时:
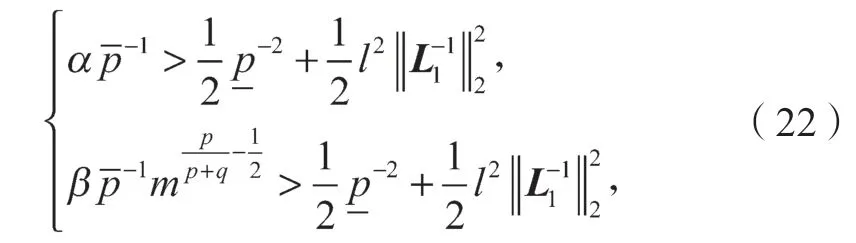
系统(21)在控制协议(7)下仍然可以实现固定时间包含控制。
3 数值模拟
例1 设某多智能体系统由2个领导者和4个跟随者构成的。跟随者分别记为1, 2, 3, 4;领导者分别记为5, 6,相应的通信拓扑如图1所示。很明显假设1和4成立。

图1 例1对应的通信拓扑图Fig.1 Corresponding communication topology with example 1
智能体的动力学由等式(1)描述。令,f=(xi,t)=xisint,d(t)=[sint, 0.5sint, -sint, 1.5sint]T,很明显,假设2, 3也成立。经过计算,可以取P=diag(2/5,3/10, 1/2, 5/7),则可以选择控制参数分别为b=7,a=p=3,q=5,α=30,β=40,γ=20,使得参数满足不等式(10);随机生成初始状态xF(0)=(7, 4, -8, 3)T,xS(0)=(6, -9)T,则有δ(0)=(9.4, -1.8,-14.7, 14.6)T。跟踪误差状态随时间变化曲线如图2所示。很明显,δ逐渐收敛到0,即固定时间包含控制问题得以解决。
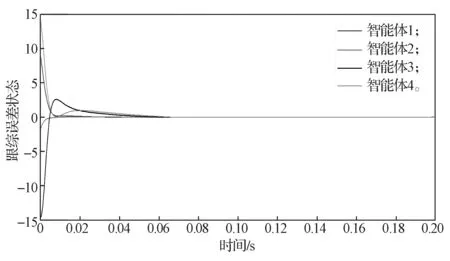
图2 带干扰情况下的跟踪误差状态随时间变化曲线Fig.2 Time-dependent tracking error state curves with disturbances
例2 考虑的多智能体系统由5个跟随智能体(分别用编号1~5表示)和2个领导智能体(分别用编号6、7表示)构成的。相应的通信拓扑如图3所示。智能体的动力学由式(21)描述。令f(xi,t)=xicost;经过简单计算可以选择控制参数分别为b=7,a=5,p=3,q=11,α=32,β=38,γ=22,使得满足不等式(22);随机生成初始跟踪误差状态为δ(0)=(2, -15,-3, 5, 12)T。跟踪误差状态随时间的变化曲线如图4所示。很明显,δ逐渐收敛到0,即固定时间包含控制问题得以解决。

图3 例2对应的通信拓扑图Fig.3 Corresponding communication topology with example 2

图4 不带干扰情况下的跟踪误差状态随时间变化曲线Fig.4 Tracking error state curves with time without disturbances
4 结语
针对有向拓扑情形下的多智能体系统,提出了一种固定时间控制协议,用以解决有向拓扑下非线性多智能体系统的包含控制问题。结果表明,该算法所提出的控制协议对未知干扰具有鲁棒性,且收敛时间与智能体的初始条件无关。最后,给出两个例子,证明了理论结果的有效性。
本研究只对非线性多智能体系统固定时间包含控制问题进行了初步研究。在今后的工作中,还要很多重要问题需要解决,主要有:
1)本文研究的有向网络拓扑是在满足细致平衡条件下的,如果对于更具有一般性的有向网络拓扑,得到的结论也许是相似的,此时的应用范围将会更加广泛。
2)在控制工程中,常用的是高阶的控制系统,本文研究的是一阶多智能体系统,在今后的研究中,考虑利用滑模控制有助于研究解决二阶控制系统。
猜你喜欢
汽车实用技术(2022年9期)2022-05-20
中国医院院长(2022年5期)2022-04-09
疯狂英语·新悦读(2021年1期)2021-01-27
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
领导文萃(2018年17期)2018-10-30
读与写·教育教学版(2017年10期)2017-11-10
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
中外管理(2015年1期)2015-03-11