
功率信息交互下单相逆变器并联控制
2022-05-11 06:32戴宇杰朱铠林燎源项雷军
华侨大学学报(自然科学版) 2022年3期
戴宇杰,朱铠,林燎源,项雷军
(华侨大学 信息科学与工程学院,福建 厦门 361021)
多逆变器并联控制作为微电网可靠运行的核心技术之一[1],引起越来越多的关注.由于逆变器单元与负载之间馈线阻抗的差异,采用传统的下垂控制会造成逆变器单元输出功率分配不均和系统环流,影响系统的稳定运行[2].采用下垂控制时,稳态频率的全局性使得频率下垂调节的功率能够实现精确调度,而电压为局部量,受限于阻抗参数的失配,电压下垂控制的功率往往存在分配误差.目前解决的主要方法之一是添加虚拟阻抗[3],但需要针对不同类型的阻抗进行设计.林燎源等[4]提出一种统一的虚拟阻抗控制方案,可以有效应对功率权重发生变化时的控制逻辑;通过电压电流双闭环控制参数设计调整逆变器等效输出阻抗为阻性,并加入自适应虚拟电阻进行调节,取得较好的均流效果[5].梁海峰等[6]通过虚拟电抗进行电压补偿,有效解决了功率分配精度与电压降落的矛盾.Qi等[7],Pham等[8]提出两维虚拟阻抗整定方案,将虚拟电阻和虚拟电感值分开调节,实现了基波功率和谐波功率均分.
根据电路原理可知,由阻抗失配引起的负荷分配问题可通过改进电压下垂方程[9]来消除功率调度误差.Wai等[10]通过改进的自调节下垂系数控制法,抑制逆变器之间的无功功率环流;Gupta等[11]在每次负荷变化时对电压下垂系数进行调整,在无通信条件下渐进改善系统无功均分精度;吕志鹏等[12]基于有功误差计算积分跟随项,补偿阻性下垂控制中的输出参考电压,实现有功负荷的精确分配.
针对传统下垂控制因馈线阻抗失配引起的功率不均问题,本文通过分析传统下垂控制的局限性,提出一种基于功率信息交互的改进下垂控制方案,并通过由两台逆变器搭建的并联系统实验平台对所提方案的有效性进行了验证.
1 逆变器并联下垂控制
1.1 单机逆变器控制
图1为单相电压型逆变器双闭环控制主电路.图1中:逆变器采用全桥拓扑;L和C为输出滤波电感和电容;RE为等效串联电阻;Rl为负载电阻;Vo为输出电容电压;iL为电感电流.在单相逆变器主拓扑的基础上加入控制环路,输出电容电压Vo与参考电压Vref作差后送入电压环,在电压控制器Gvc(s)的作用下输出电流参考信号;然后,与电感电流作差后经过电流控制器Gic(s)输出调制信号;最后,与载波调制后产生PWM信号驱动逆变全桥的开关管.
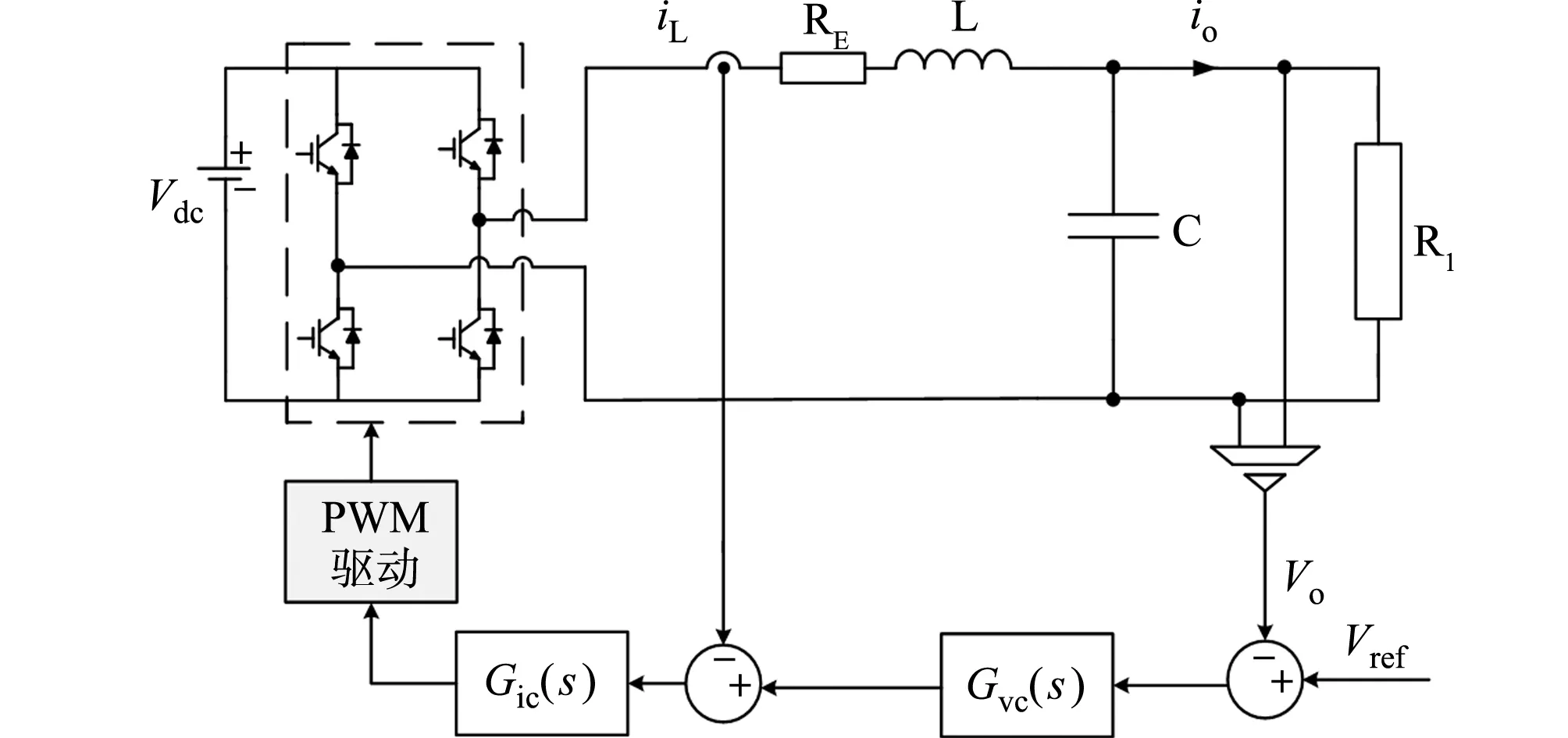
图1 单相电压型逆变器双闭环控制主电路
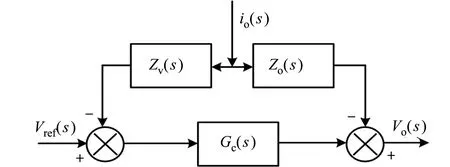
根据图1可得单相逆变器的等效控制框图,如图2所示.

图2 单相逆变器等效控制框图
根据图2计算,可得
Vo=Gc(s)Vref-Zo(s)io,
(1)
(2)
(3)
由式(1)可以看出:逆变器输出特性可用两个参数来描述,其中第1个参数为逆变器处于空载状态下的输出电压,Gc(s)表示逆变器跟随参考电压的能力,定义为空载电压增益;另一个参数Zo(s)具有阻抗的量纲,将其定义为逆变器的等效输出阻抗,其特性与逆变器采用的控制策略及参数息息相关.
1.2 传统阻性下垂控制

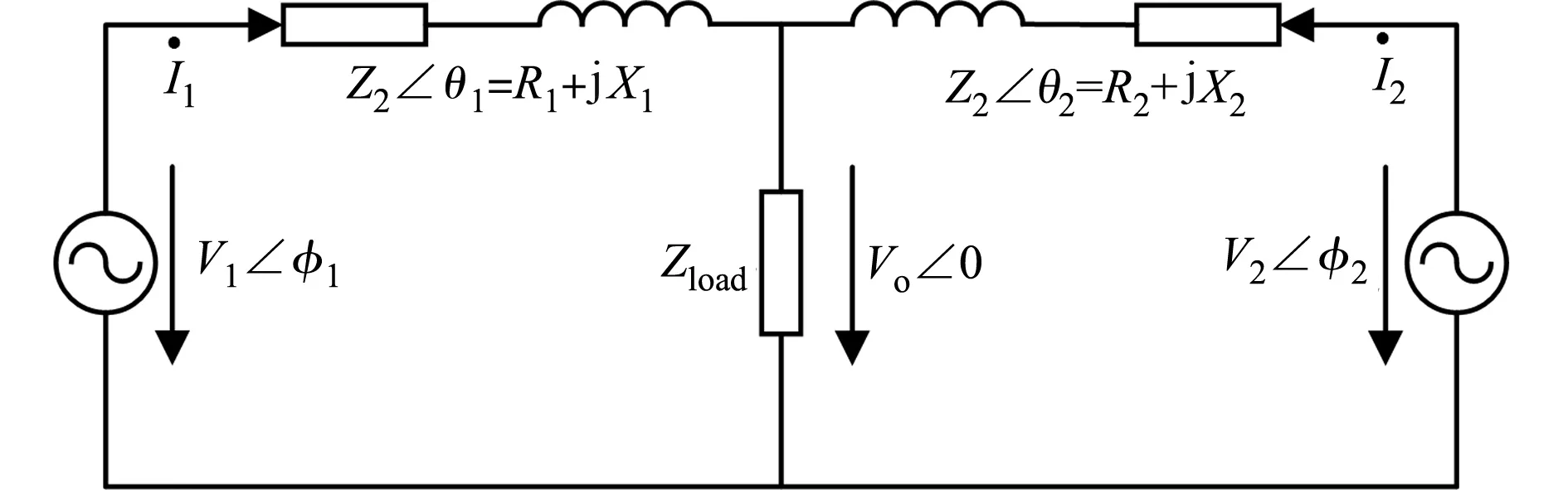
图3 并联逆变器等效电路模型
在低压微网中线路阻抗主要呈阻性,考虑阻抗角θi≈0°时,可计算得到逆变器i输出的有功和无功功率为
(4)
(5)
对上式分别对Vi和φi求微分,可得
(6)
(7)
由于Vi≫φi,忽略ΔViφi,可得出在阻性阻抗条件下,逆变器输出的有功功率与电压幅值,无功功率与电压相位呈线性关系.因为相角不好控制,所以用控制角频率来等效.由以上分析,可推导得到传统阻性下垂控制方程为
Vi=V*-kp,v,iPi,
(8)
ωi=ω*+kq,ω,iQi.
(9)
其中,kp,v,i,kq,ω,i分别为逆变器i的电压和角频率下垂系数;ω*为逆变器额定输出电压角频率,V*为逆变器额定输出电压幅值;ωi和Vi分别为逆变器i的参考电压角频率和幅值设置值.
逆变器并联系统在达到稳态时,其输出电压的角频率为全局统一变量,幅值为局部变量.结合式(4),(8),以及式(9),可得
(10)
kq,ω,1Q1=kq,ω,2Q2=…=kq,ω,iQi.
(11)
设每个逆变器的无功下垂系数都相等,可知稳态时各逆变器能够均分无功负荷.但由于有功功率与逆变器的等效输出阻抗和馈线阻抗有关,在电压下垂系数相等时有功功率的均分精度也会受到阻抗失配的影响.此外,当逆变器等效输出阻抗和馈线阻抗的感性分量无法忽略时,输出功率会有较强的耦合,这在一定程度上会影响系统的稳定性.
2 基于功率信息交互的改进下垂控制
2.1 改进下垂方程
从功率均分的角度分析,现有逆变器并联系统中逆变器单元与负载之间馈线阻抗的不同.因此,采用传统的下垂控制其只能根据自身输出的功率进行调节,会造成逆变器单元输出功率分配不均和系统环流,同时也会导致输出电压与输出角频率偏离额定值,影响系统的稳定运行.此时借助通信手段获取各逆变器的功率信息,实现逆变器之间的功率信息交互,让逆变器获取其他模块的功率信息,进而对传统下垂方程进行改进.这样就可对各逆变器的下垂系数进行自适应调节并添加电压偏移补偿,从而提高并联系统的均流度,且减小因下垂机制引起的逆变器输出电压偏移.
通信中心用于逆变器并联系统有功功率信息的传递.通过整合并联系统中每台逆变器的功率信息,将计算得到平均功率反馈到各逆变器中.其计算公式为
(12)
式(12)中:Pcan是并联系统的平均有功功率,由通信中心通过广播方式传输到各个逆变器中.
考虑到采用阻性下垂时无功功率稳态时能够实现均分,文中关注有功功率均分性能的改善.通过调节各逆变器的下垂系数来提高功率的分配精度,并添加公共补偿项来实现下垂曲线平移,减小电压偏移.所提基于功率交互的改进下垂控制方程为
Vi=V*-[kp,v,i+k(Pi-Pcan)]Pi+kp,v,iPcan.
(13)
式(13)中:k为功率调节参与系数.
以下结合下垂曲线变化示意图(图4),对方程(13)的调节机制进行说明.
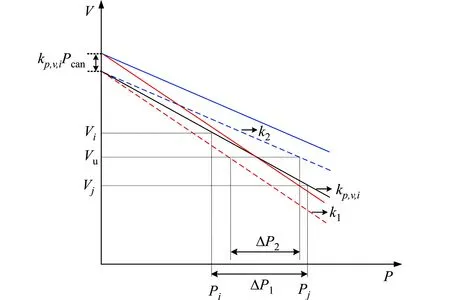
图4 下垂曲线变化示意图
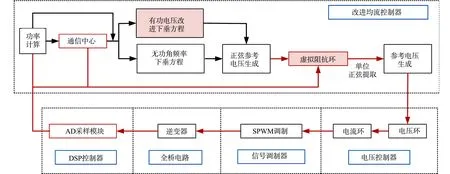
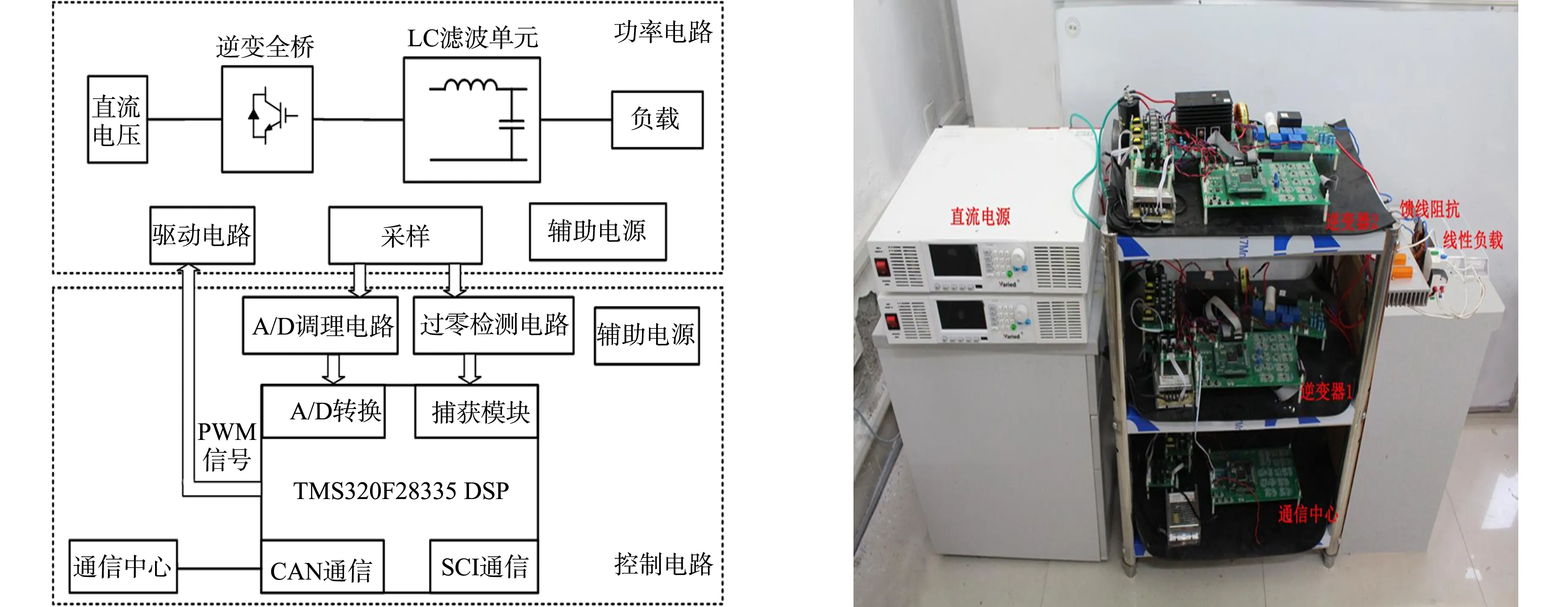
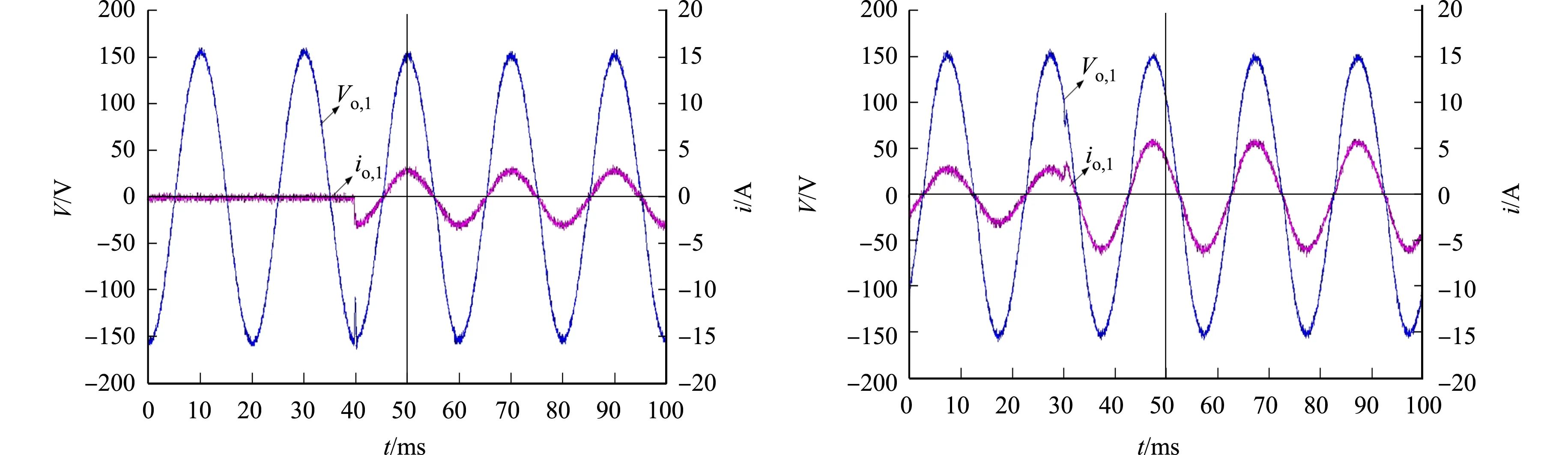
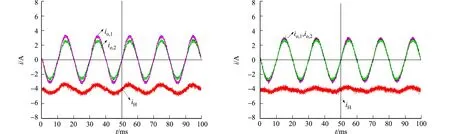
传统阻性下垂各逆变器的电压下垂系数均为kp,v,i,达到稳态时的功率偏差为ΔP1.当并联系统中的逆变器输出的有功功率偏大时,即Pi>Pcan,等效下垂系数调整为k1=kp,v,i+k(Pi-Pcan)>kp,v,i,进而减小有功功率输出,对应图4中的红色虚线;而当输出功率偏小时,有Pi 功率调节参与系数k的取值范围受到电压偏移量ΔV的约束.对于不同负荷来说,ΔV可能有所差异,带载时,ΔV随着输出功率的增加而增大.根据式(13)可以得到参与功率调节的系数k的取值范围为 (14) 式(14)中:ΔVmax为逆变器输出电压允许的最大偏移量;Pi,max为逆变器i满载时输出的有功功率. 针对馈线阻抗不同引起的逆变器并联系统稳态环流和功率分配不均等问题,常用的方法为添加虚拟阻抗环路来调节参考电压,由虚拟阻抗来消除馈线阻抗失配的问题.加入虚拟阻抗环路的控制框图,如图5所示.图5中:Zv为所添加的虚拟阻抗. 图5 引入虚拟阻抗的控制结构框图 文中提出基于功率交互信息调制的改进虚拟阻抗为 Rv,i=R*+kp,i[Pi-(Pcan-Pi/N)]. (15) 式(15)中:kp,i为虚拟阻抗调节系数;R*为基准虚拟阻抗. 当并联系统中含有两台逆变器,即N=2时,两机所添加的虚拟电阻为 (16) (17) 观察式(16),(17),当kp,1=kp,2时,若P1>P2,则有Rv,1>Rv,2,那么输出有功功率较大的逆变器1加入的虚拟电阻值将更大,进而会减小自身有功输出功率输出,有助于减小稳态时两机的有功功率偏差;若P1=P2,则有Rv,1=Rv,2,此时改进虚拟阻抗主要是增大所加的虚拟电阻,有助于进一步削弱馈线阻抗的不匹配程度.此外,虚拟阻抗的选取同时需要兼顾输出电压质量,如果选取偏大,会增加逆变器输出电压的跌落,要对其作限幅处理,因此调节系数kp,i的选择要折中考虑.综上,可以得到基于功率信息交互的逆变器并联控制框图,如图6所示. 图6 基于功率信息交互的逆变器控制框图 前面分析指出,通信中心负责传递平均功率,一方面通过自适应调整下垂系数,改进下垂方程,另一方面调制虚拟阻抗,提高有功功率均分精度,减小系统环流.控制过程如下:通过数字信号处理(digital signal process,DSP)控制器采集逆变器的输出电压和电流进行功率计算,然后将信息传递到通信中心后计算平均功率反馈到各逆变单元,结合自身功率改进有功电压下垂方程得到电压参考,减去虚拟阻抗环产生的压降;最后,通过电压环控制器生成调制信号,经过正弦脉宽调制(SPWM)后生成逆变器开关器件的门级触发信号,控制逆变器开关管的通断. 为了对所提改进控制方案的有效性进行验证,搭建了一套由两台600VA逆变器组成的并联系统实验平台,包括辅助电源、采样电路和驱动电路等,控制芯片采用TI公司的TMS320F28335,采用全数字控制.逆变器的硬件结构框图和硬件平台,如图7,8所示.逆变器并联系统相关参数,如表1所示. 图7 逆变器并联系统硬件结构框图 图8 逆变器并联系统硬件实物图 表1 逆变器并联系统实验参数 单台逆变器在两种切载工况下的输出电压和输出电流的波形,如图9所示.图9中:V为输出电压;i为输出电流;t为时间,下同略.从图9可知:在双闭环控制下,逆变器输出电压波形质量较好,切载过程中电压电流的动态响应较快,空载时输出电压幅值为156 V,波形无不良畸变.但由于电压下垂环节及逆变器等效输出阻抗和馈线阻抗的影响,逆变器带载时输出电压幅值会有一定的跌落.因此,可以考虑结合分层控制中的二次控制对输出电压幅值进行修复. (a)空载切半载 (b)半载切满载 在进行逆变器并联实验之前,需要保证两台逆变器空载时输出电压相位同步.锁相前后两台逆变器的输出电压波形,如图10所示.图10中:锁相前逆变器1和2的输出电压波形分别为Vo,1和Vo,2.从图10可知:相位存在偏差,逆变器2通过锁相环节对交流母线电压进行相位锁定,并在电压过零点时切入并联系统;然后,锁相环节退出,逆变器在下垂控制的作用下保持并联运行. (a)锁相前 (b)锁相后 当负载电阻为25 Ω时,传统方案和改进方案下垂控制下两台逆变器的输出电流和环流(两机电流相减)波形,如图11所示. (a)传统下垂控制 (b)改进下垂控制 实验测得环流峰值为0.60 A.此时,取kp,1=kp,2=0,所加虚拟阻抗为基准值0.6 Ω.由于两台逆变器的馈线阻抗差异较大,系统存在较大的阻抗失配,在传统下垂控制和固定虚拟阻抗的作用下,并联系统仍存在较大的稳态环流. 从图11可知:相比于传统方案,环流峰值由0.6 A减小为0.24 A.这是因为在逆变器1输出有功功率更大的情况下,所提改进方案增大了逆变器1的有功下垂系数,而减小了输出有功功率较小的逆变器2的有功下垂系数.同时,对两台逆变器所加虚拟电阻进行不同调整(逆变器1所加虚拟电阻也将更大).实验结果表明:改进下垂方程和不同虚拟阻抗的共同作用能够减小并联系统的交流环流,有效提高稳态时输出有功功率的均分精度. 针对采用传统下垂控制时逆变器并联系统因馈线阻抗失配而引起的功率均分精度较差的问题,提出一种基于功率信息交互的改进下垂控制.实验结果表明,所提控制策略能够有效减小馈线阻抗失配时并联系统的环流,提高功率均分精度.2.2 改进虚拟阻抗
3 实验验证
3.1 并联系统实验平台的搭建

3.2 单机逆变器输出电压电流波形
3.3 交流母线电压锁相
3.4 传统与改进的下垂控制
4 结束语
猜你喜欢
电子技术应用(2022年9期)2022-10-20
卫星电视与宽带多媒体(2022年10期)2022-07-01
电力自动化设备(2022年4期)2022-04-14
时代文学·上半月(2022年1期)2022-01-15
国际医学放射学杂志(2021年3期)2021-11-30
电子制作(2021年11期)2021-06-17
电子制作(2019年16期)2019-09-27
雷达学报(2018年3期)2018-07-18
中学数学杂志(初中版)(2017年4期)2017-08-28
科技传播(2015年14期)2015-03-25
