
仓储设备及作业流程监控虚拟化技术研究
2022-05-12 01:25陆枳屹徐志翔程茂上杨光辉
制造业自动化 2022年4期
陆枳屹,项 前,徐志翔,程茂上,杨光辉
(1.东华大学 机械工程学院,上海 201620;2.上海精星物流设备工程有限公司,上海 201611)
0 引言
仓储监控系统[1~4]是利用计算机控制工业执行器完成识别、行走、定位、装卸等动作,达到自动化存取物料目的。然而,现代物流仓储具有订单量大、批次多、小批量[5]、异构设备多等特点,使得传统单体式架构下的仓储监控系统在作业效率、并发响应能力等方面,已无法应对多作业任务并行、多设备远程可视化监控等需求。
实现设备虚拟化、作业虚拟化是满足仓储系统高效作业的关键,且为复杂仓储监控系统的实时远程可视化监控提供了解决方案。虚拟化技术是指将硬件资源中的属性、行为以及软件资源中的功能实现机制进行封装,并映射到虚拟空间中,通过对虚拟资源集成与访问,实现软、硬件资源相互感知与反馈控制[6,7]。国内外学者在设备资源的虚拟化技术下开展了大量的研究,并取得一定的进展。Angrish A[8]等围绕构建网络物理系统,针对物理机器的数字实体,提出了基于文档模式的存储方式,并采用第三方应用程序与数字实体进行交互,达到控制制造设备目的;汤华茂[9]等通过构建分布式语义描述模型,解决了在分布式环境下底层异构设备数据结构不一致性问题;王一斌[10]针对现代仓储作业量高、设备繁杂造成的可靠性差、集成难等问题,采用面向服务的方法设计了基于Web的仓储监控系统;吴娇[11]等提出了制造资源虚拟化框架,利用云制造资源适配器对制造资源进行统筹管理。
然而,国内外学者在将虚拟化方法应用到密集仓储设备、作业流程监控等方面的研究相对较少。因此,针对以上密集仓储监控系统亟需解决的问题,提出仓储监控系统的虚拟化技术。
1 问题描述
如图1所示,本文以某企业的密集仓库为例,其中包括1套货架、1台提升机、5台输送机、4台环轨穿梭车RGV(Rail Guided Vehicle)、4台穿梭板SRGV(Shuttle Rail Guided Vehicle)、1套环形车轨道、一套提升机轨道。如图2所示,以入库作业为例,具体流程如下:

图1 密集仓库布局
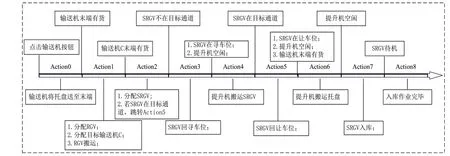
图2 入库作业流程图
1)库房工作人员将货物放置托盘,进行组盘操作,设置目标货位,并将托盘运至输送机(1、2或3);
2)输送机将托盘运送至末端,动态选配RGV取托盘后沿环形轨道将托盘运至目标输送机4处;
3)动态选择空闲、距离最近的SRGV,并用提升机搬运至目标通道的让车位;
4)提升机运行至输送机4处并申叉取货,将货物送至目标通道位;
5)SRGV取货后将托盘运送至指定目标货位,完成入库操作。
由此可见,密集仓储中存在同构和异构设备协同作业多、实时响应能力需求高、多作业并行时设备资源有限,以及各搬运设备状态、调度和控制逻辑复杂等问题。
2 仓储虚拟化原理
针对以上密集仓储作业过程的难点,构建仓储监控虚拟化模型,通过工业设备通信技术、数据库技术及互联网技术,将仓储资源实体、流程实体逐步转化为软件中的关系数据实体、对象及服务等数字实体,通过对虚拟化的数字实体的交互操作,达到对仓储物理资源和作业过程的远程监控目的。其中,仓储资源实体包括货架、搬运设备、物料、托盘等;流程实体是出/入库作业过程的概念抽象;数字实体是采用面向对象的计算机语言描述的对象类型。
如图3所示,仓储监控虚拟化模型包括:设备、货架等资源虚拟化与作业流程虚拟化。在仓储资源实体虚拟化过程中,通过实体关系(ER,Entity Relationship)分析,描述仓储物理实体间的关系,基于对象关系映射(ORM,Object Relational Mapping),建立仓储对象模型与关系数据实体之间的映射关系,为仓储监控系统提供数据访问的基础。通过构建设备资源虚拟化模型,降低系统软件和设备之间的紧耦合关系,利用通信技术实时跟踪、获取物理实体的状态。在设备实时状态获取的基础上,将作业流程划分为若干活动并构建作业流程虚拟化模型。通过对设备变量的读操作支持仓储作业流程的监控与决策,其中,仓储作业流程的决策包括货位优化、设备调度、故障诊断;通过对设备变量的写操作控制设备的搬运动作。
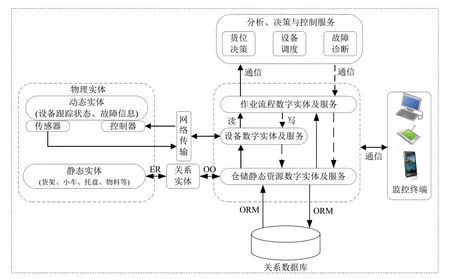
图3 仓储监控虚拟化模型
3 仓储监控虚拟化关键技术
3.1 设备虚拟化技术
如图4所示,通过采用面向对象(OO,Oriented object)的方法为各设备建立数字实体,以实现仓储实体与数字实体之间的相互映射,并将其封装成设备监控服务。其中,OPC(OLE for Process Control)[12]通信技术是实现设备虚拟化的关键技术,通过采用OPC通信技术统一通讯服务接口、屏蔽设备异构特性,实现程序与设备之间的数据交互。
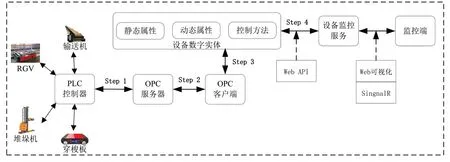
图4 设备虚拟化模型
基于OPC通信技术,按照四个阶段实现设备与数字实体之间的映射,具体步骤如下:
1)从PLC控制器到OPC服务器
OPC服务器由通信通道、组对象及数据项组成,通过TCP/IP协议与底端控制器相连,并将PLC中的数据块地址与值同步映射成OPC服务器中的设备可读写变量名与值。
2)从OPC服务器到OPC客户端
基于统一的OPC协议,上位机设计OPC客户端,封装OPC服务器的数据项的访问和赋值方法,与OPC服务器连接。
3)从OPC客户端到设备对象
设备对象是仓储物理设备在计算机内的面向对象描述,即设备的数字实体。基于OPC客户端,连接OPC服务器,将订阅的OPC变量映射为设备对象的实时状态属性,通常通过1个OPC客户端的连接可映射多个设备对象。
4)从设备对象到服务
在分布式仓储监控系统环境下,要求各模块能够响应高并发的需求,因此,对设备的数字实体进行服务化封装,实现的技术包括Web的可视化监控技术及远程控制技术。使用ASP.NET Core Web API[13]的Web服务技术统一设备的控制方法,将数字实体封装成监控服务;通过数据实时交互的框架——SignalR[14]技术,实时向监控端发送设备更新的数据;同时,结合Html、CSS等Web可视化技术实现对接收数据的Web可视化监控。
3.2 作业流程虚拟化技术
如图5构建作业流程虚拟化模型,采用面向对象(OO)的方法,将流程实体抽象为出/入库数字流程实体;通过Web API的Web服务技术将其封装成作业流程服务,融入SignalR服务技术实时推送从服务接受的数据至监控端,并结合Html、CSS等前端技术实现作业流程服务监控界面可视化。
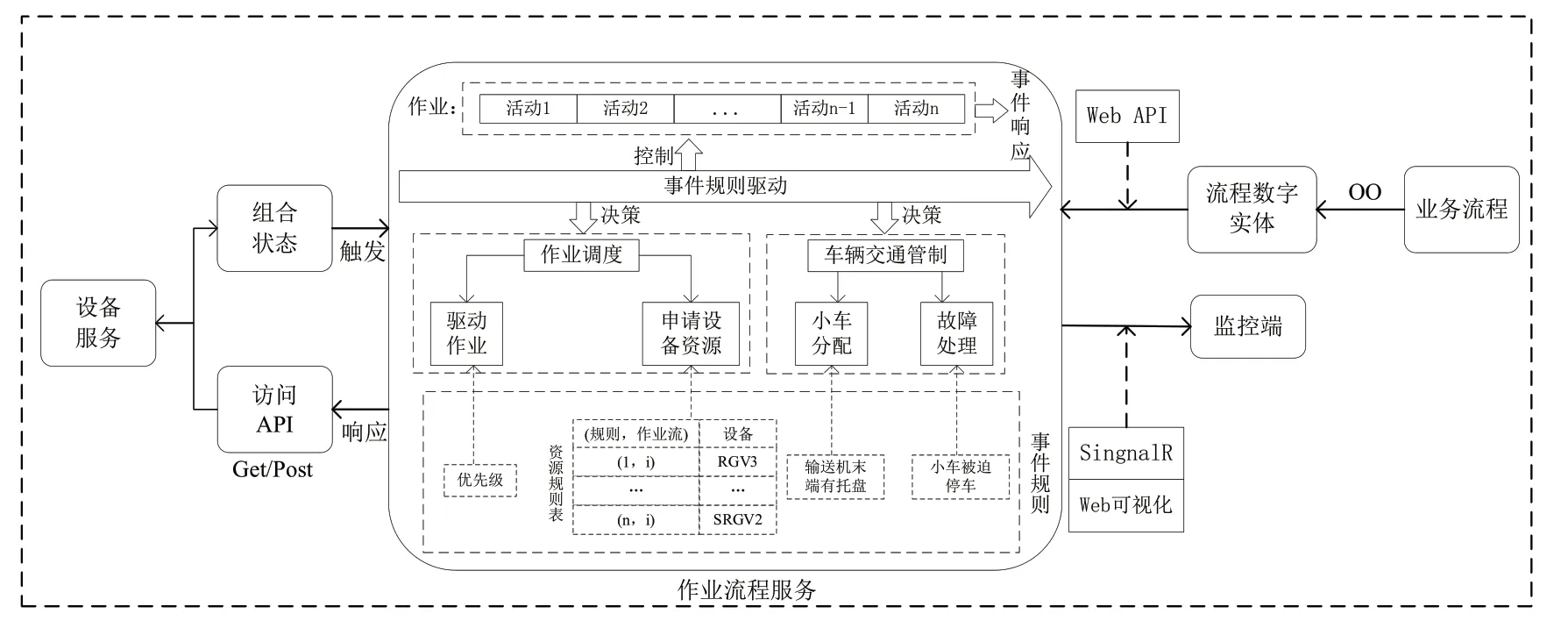
图5 基于事件驱动的作业流程模型
将仓储作业流程按阶段划分并进行活动描述,每个活动需要由事件规则触发并按顺序执行,以满足作业流程的有序性、事件响应性;基于事件规则驱动控制作业活动调度,并实现作业调度和车辆交通管制的决策。其中,事件规则指的是每一个事件都携带有事件的触发与响应,只有当触发条件发生时,才执行相应的响应内容。按作业优先级驱动出/入库作业,优先级高的作业先行执行;为避免多个作业同时占用同一设备的情况,构建设备资源分配规则表,根据作业及设备的实时状态分配合理的设备。
在仓储作业过程中,当输送机末端有托盘时触发小车分配的事件,由于多台RGV同时行走在环形轨道中,可能存在交通拥堵的问题,从而影响作业流程的推进,因此,还需对已分配的小车进行故障分析诊断。在RGV执行搬运作业的过程中,RGV自身能够实时监测前方是否存在障碍,在监测过程中,基于事件驱动机制设计RGV的触发与响应规则,即当RGV前方拥堵时触发事件,当前小车应原地待命以响应;当前方不再拥堵时触发事件,当前小车应继续前进以响应。
4 系统的实现与应用
4.1 设备监控模块
基于设备监控服务,采用SignalR技术向监控端提供设备状态数据,并通过Html、CSS等Web前端技术向监控端提供可视化视图界面,如图6、图7所示。操作人员能够通过设备监控可视化界面实时掌握设备的OPC通信、运行、故障以及电量等健康状态信息。
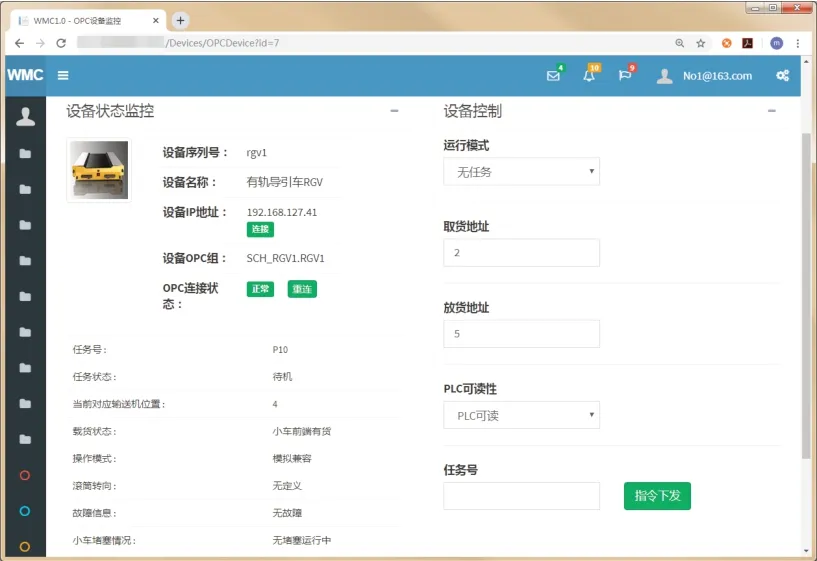
图6 设备监控可视化界面

图7 设备监听状态健康界面
4.2 作业现场监控模块
以入库作业为例,在入库作业过程中,可以通过作业场景监控界面查看作业在整个仓库的执行状态。如图8所示,当设备出现故障时,图标将闪烁警报,此时,通过点击设备图标跳转到单设备监控页面,实现对设备的手动控制以保证作业正常运行。如图9所示,通过可视化作业流程监控界面,实时跟踪多任务作业流程的状态。
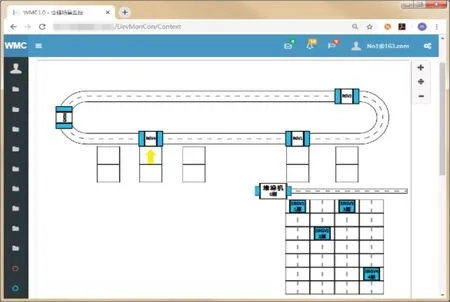
图8 作业场景可视化监控图
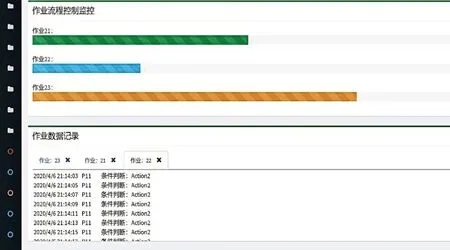
图9 可视化作业监控界面
4.3 应用效果
如图10 某企业密集仓储作业现场所示,基于设备及作业流程虚拟化的监控系统已经在某企业中应用,与传统的仓储监控系统相比,在提高仓储效率、监控可视化及订单应对能力等方面,具有一定的优势,具体如表1 系统应用效果对比所示。

图10 某企业密集仓储作业现场
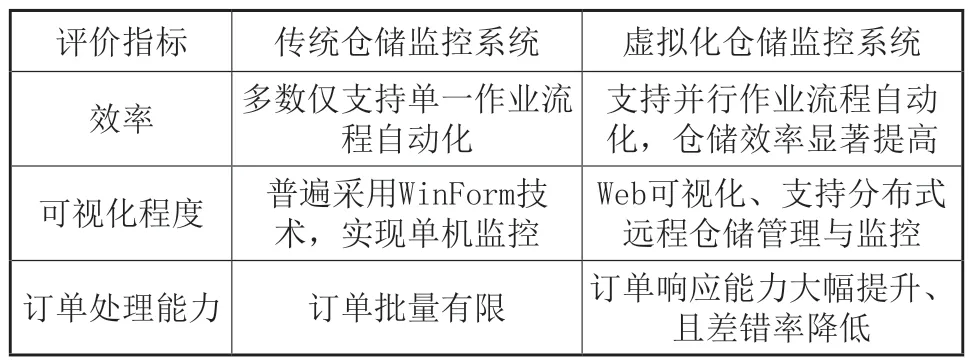
表1 系统应用效果对比
5 结语
采用OPC通信、实时Web推送服务等技术构件设备虚拟化模型,通过仓储实体的逐层数字化映射,简化了对设备的远程管理与监控,结合Html、CSS等Web前端技术,实现了仓储设备及作业流程的Web可视化。基于事件响应机制,建立了作业流程虚拟化模型,提高了并行作业系统的鲁棒性。目前,该监控系统已在企业投入应用,并取得良好效果。
猜你喜欢
世界科学技术-中医药现代化(2022年3期)2022-08-22
北京测绘(2022年6期)2022-08-01
师道·教研(2022年1期)2022-03-12
北京测绘(2021年7期)2021-07-28
中国外汇(2019年18期)2019-11-25
电子制作(2019年10期)2019-06-17
当代陕西(2019年5期)2019-03-21
电子制作(2018年14期)2018-08-21
电子制作(2017年7期)2017-06-05
领导决策信息(2017年9期)2017-05-04
