基于正弦曲线和圆弧的无碳小车的S 形轨迹和凸轮设计*
2022-05-14 04:09吴东昊颜景润郑永杰任志国刘丽娟
南方农机 2022年10期
吴东昊,颜景润,康 凯,郑永杰,任志国,刘丽娟
(河北建筑工程学院机械工程学院,河北 张家口 075000)
全国大学生工程训练综合能力竞赛要求选择环形运行方式的无碳小车在比赛场地中运行S 形轨迹,成功绕过障碍桩,而且运行的圈数越多,绕过的障碍桩的个数越多,比赛的成绩越好。因此,无碳小车轨迹和凸轮的合理设计决定着无碳小车能够绕过障碍桩,成功运行设定的S 形轨迹,并能够使每一圈的轨迹有效重合,从而在比赛场地中完成多圈运行[1-3]。
1 轨迹设计
驱动车场地为5 200 mm×2 200 mm 长方形平面区域,比赛赛道分为半径为550 mm 的半圆形赛道和长度为3 000 mm 的直线赛道,在半圆形赛道上的起点、中点和终点处放置了3 个直径20 mm、高度200 mm 的障碍桩,在直线赛道上每间隔1 000 mm 放置了4 个同样的障碍桩。由于无碳小车两后轮连接线的中心点在该场地中运行的S 形轨迹是上下对称的,所以只设计了无碳小车两后轮连接线中心点的一半轨迹,另一半的轨迹只要按照设计好的轨迹进行对称即可得到[4]。无碳小车两后轮连接线中心点的一半轨迹,如图1 所示,其中黑色粗实线表示驱动车场地的边界,空心小圆圈表示障碍桩的位置。
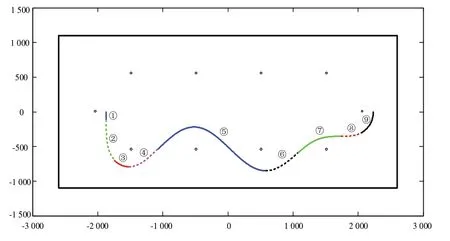
图1 无碳小车两后轮连接线中心点的一半轨迹
无碳小车两后轮连接线中心点的轨迹设计采用正弦曲线和圆弧相结合的方式,从起始位置出发,第一段轨迹是直线,第二段轨迹是正弦曲线,第三段轨迹是圆弧,第四段轨迹、第五段轨迹、第六段轨迹、第七段轨迹和第八段轨迹是正弦曲线,第九段轨迹是圆弧。无碳小车两后轮连接线中心点的轨迹采用圆弧设计,是因为圆弧的曲率是不变的,可以在两段正弦曲线之间起到一个过渡作用,使得凸轮的形状更加平滑[5-6]。
正弦曲线的表达式为y=A*sin(pi*x/B),式中A为振幅,B为半周期。首先确定正弦曲线的半周期B,然后通过前后两段曲线在连接点处的斜率或曲率相等求得振幅A,最后通过上下左右平移曲线使得其和上一段曲线相接。当前后两段曲线的曲率都等于0 时,通过旋转使得前后两段曲线在连接点处的斜率相等。
以第五段正弦曲线为例,根据该曲线经过的点确定半周期为1 100,然后根据前后两段曲线的斜率相等,即A*pi/B=tan(sita4),求得A=315.13,最后将曲线向左平移x3(end)、向下平移y3(end),使其和第四段曲线相接,得到第五段曲线的函数为y=315.13*sin(pi*(x-x3(end))/1 100)+y3(end)。
对于圆弧曲线,需要求得圆弧的半径和圆心。圆弧的半径通过上一段曲线终点处的曲率可以得到,圆弧的圆心通过解方程组可以得到,圆弧的圆心和上一段曲线的终点过一条直线,该直线的斜率为上一段曲线终点处斜率的负倒数,可以得到两个方程,上一段曲线的终点也是圆弧上的点,可以得到一个方程,从而通过解方程组可以求得圆弧的圆心[7-8]。
由于无碳小车两后轮连接线的中心点在该驱动车场地中运行的S 形轨迹是上下对称的,所以无碳小车两后轮连接线中心点的轨迹在起点和终点处的斜率要垂直于比赛场地的水平中心线[9-10]。在起点处,轨迹是一条竖直的直线,在终点处,轨迹是一段圆弧,该段圆弧在终点处要垂直于比赛场地的水平中心线,再根据求圆弧圆心的过程,可以得到式(1)、式(2)和式(3):
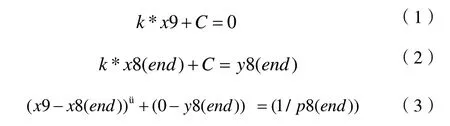
其中,x9 为该段圆弧圆心的横坐标;k为过圆心和上一段曲线终点的直线斜率,k=tan(arctan(A1*pi/B)-sita7);x8(end)和y8(end)分别为上一段曲线终点的横坐标和纵坐标;p8(end)为上一段曲线终点处的曲率,p8(end)=A1*pi2/B2。
根据式(1)、式(2)和式(3)可以得到式(4):

然后采用迭代法求第八段正弦曲线的参数,迭代法的过程如图2所示。
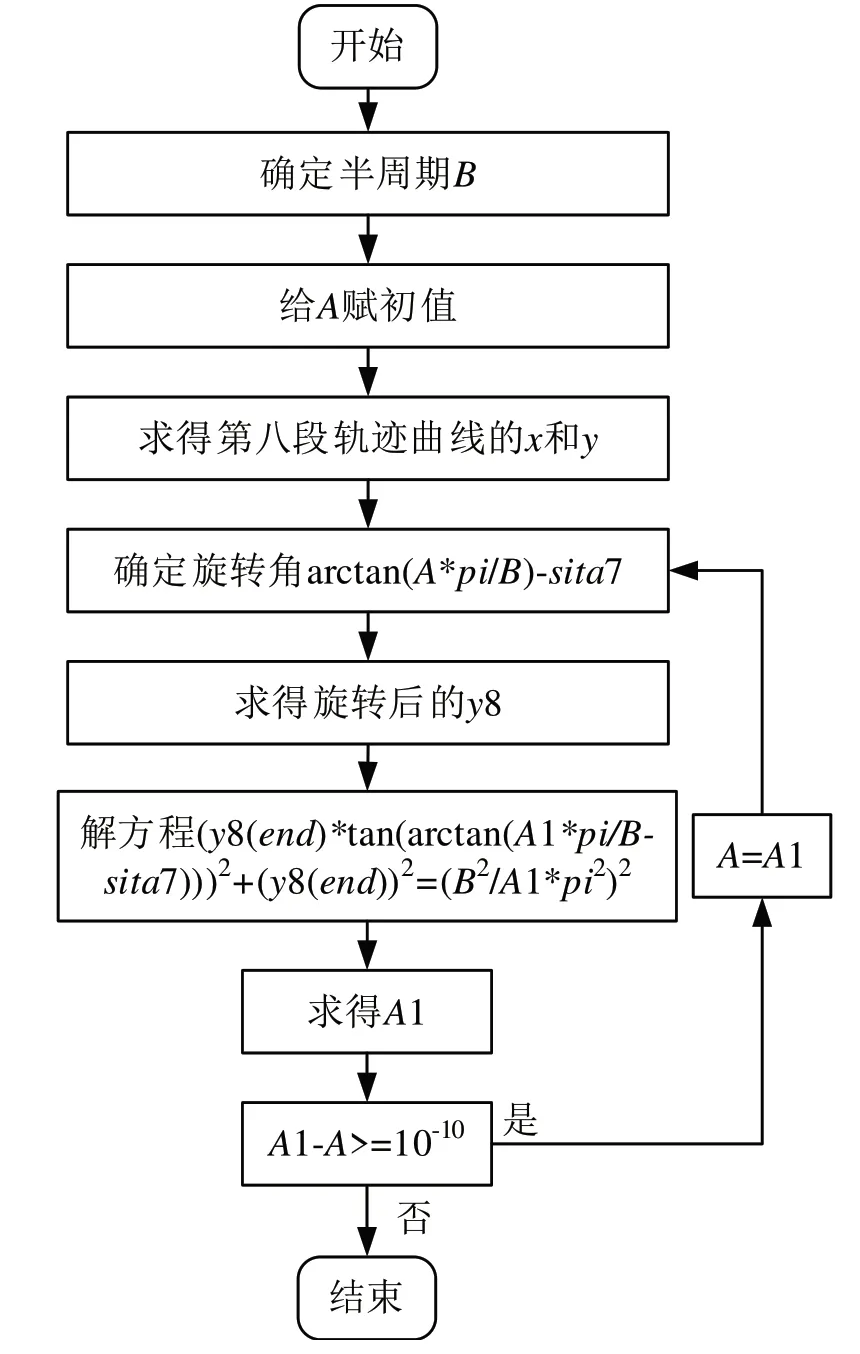
图2 迭代法的过程
对于无碳小车前轮和两个后轮的轨迹,根据式(5)、式(6)和式(7)可以得到前轮和两个后轮的一半轨迹。
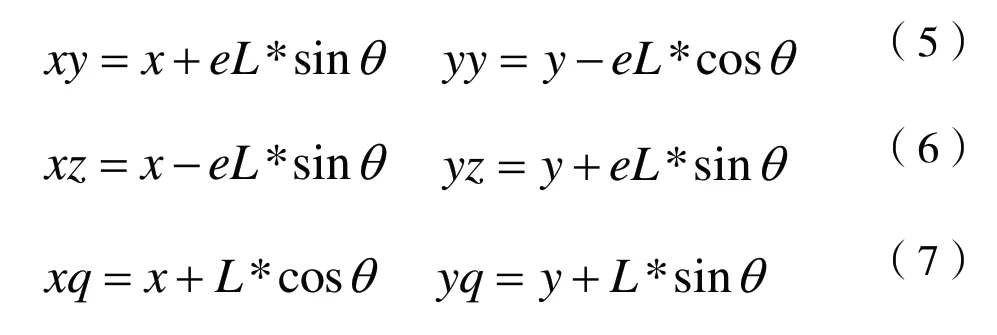
其中,x、y表示两后轮连接线中心点轨迹的横坐标和纵坐标,xy、yy表示右后轮轨迹的横坐标和纵坐标,xz、yz表示左后轮轨迹的横坐标和纵坐标,xq、yq表示前轮的横坐标和纵坐标,eL表示两后轮到其连接线中心点的距离,L表示前轮到两后轮连接线中心点的距离,θ表示两后轮连接线中心点轨迹的切线和横坐标轴的夹角。
对于无碳小车前轮和两个后轮的另一半轨迹,由于两个后轮的轨迹是关于比赛场地的水平中心线对称的,将得到的两个后轮的一半轨迹进行对称即可得到两个后轮的另一半轨迹;但是由于无碳小车前轮的轨迹不是关于比赛场地的水平中心线对称的,所以需要通过无碳小车两后轮连接线中心点的另一半轨迹得到前轮的另一半轨迹。无碳小车前轮、两个后轮和两后轮连接线中心点的轨迹,如图3 所示,其中实线表示前轮轨迹,单点划线表示右后轮轨迹,双点划线表示左后轮轨迹,虚线表示两后轮连接线中心点轨迹。
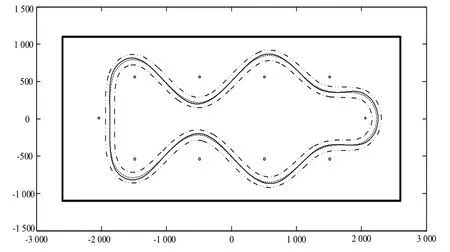
图3 前轮、两个后轮和两后轮连接线中心点的轨迹
2 凸轮设计
完成无碳小车两后轮连接线中心点的轨迹设计后,首先通过轨迹函数可以求得轨迹的曲率,再根据式(8)求得前轮转角。

然后利用前轮转角结合凸轮基圆半径求得凸轮的推程,如果无碳小车左转,根据式(9)求得凸轮推程;如果无碳小车右转,根据式(10)求得凸轮推程。
其中,S为凸轮推程;R0为凸轮基圆半径;考虑到凸轮厚度,L1和L2分别为前轮到凸轮右边和左边的距离。
最后根据无碳小车两后轮连接线中心点的轨迹求出两后轮连接线中心点每一步运动的距离,利用式(11)求出主动轮每一步运动的距离,主动轮每一步运动的距离占主动轮运动总距离的比例与2*pi的乘积即为该推程所对应的凸轮转角。

根据凸轮转角和凸轮推程得到的凸轮形状,如图4所示。
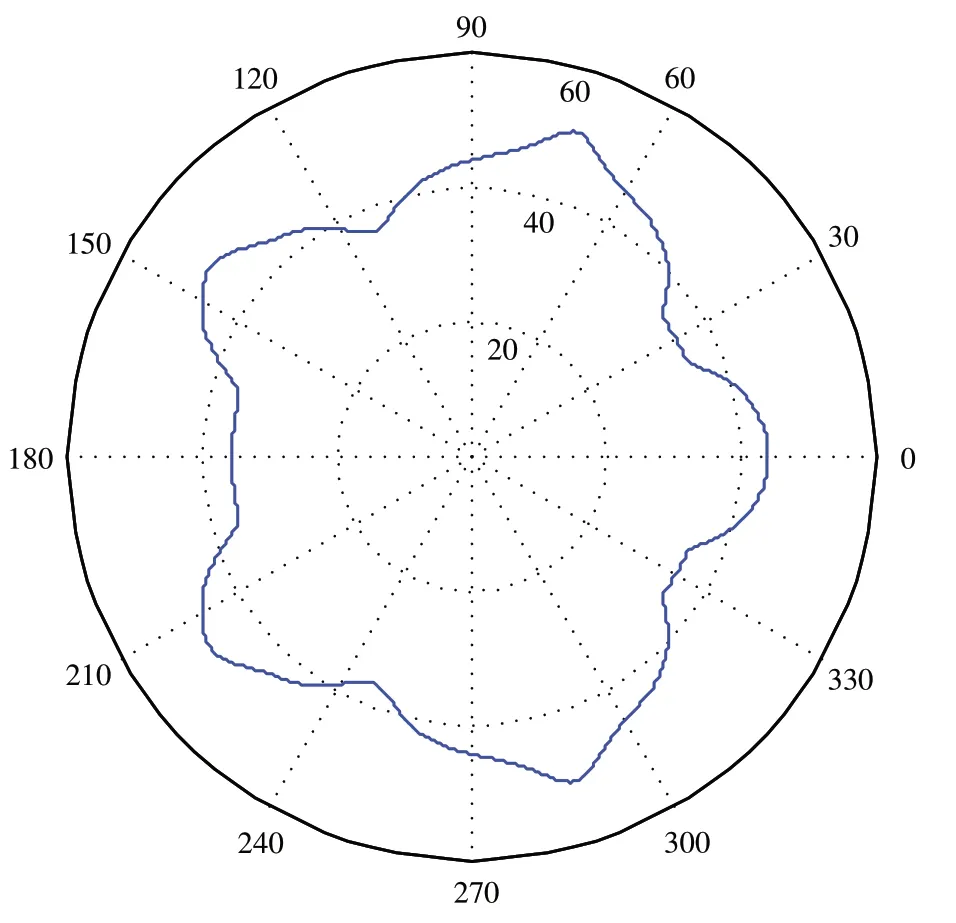
图4 凸轮形状
3 结论
首先采用正弦曲线和圆弧进行无碳小车两后轮连接线中心点轨迹的设计,圆弧在两段正弦曲线之间的过渡作用,使得凸轮的形状更加平滑;然后利用Matlab 进行编程,验证了轨迹和凸轮设计的合理性;最后经过实验验证,无碳小车能够有效地绕过障碍桩,完成S形轨迹,满足竞赛的要求。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
计算机技术与发展(2020年8期)2020-08-12
电脑报(2020年12期)2020-06-30
电脑报(2019年4期)2019-09-10
小学生学习指导·爆笑校园(2019年6期)2019-09-10
科技视界(2018年21期)2018-12-10
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11
建筑工程技术与设计(2015年26期)2015-10-21
大众摄影(2015年9期)2015-09-06