黏小管成形术中缝合线扩张小梁网过程的有限元分析与实验研究
2022-05-19 13:05巴鹏刘识博刘进长
科学技术与工程 2022年12期
巴鹏, 刘识博,2, 刘进长
(1.沈阳理工大学机械工程学院, 沈阳 110159; 2.中国科学院自动化研究所复杂系统管理与控制国家重点实验室, 北京 100090;3.科技部高技术研究发展中心, 北京 100044)
青光眼是全世界排名第二的致盲疾病和排名第一的不可逆致盲疾病[1-2]。而原发性开角型青光眼是临床中最为常见的一种类型,具体发病机制尚未明确[3]。目前,唯一已知可改变的致病危险因素是升高的眼内压,它通常由房水流出减少导致,而房水流出阻力主要产生于小梁网(trabecular meshwork,TM)与施莱姆氏管(Schlemm’s canal,SC)处。因此,青光眼的治疗方法包括使用降眼压药物、激光治疗或手术等手段来降低眼内压[4]。但传统的过滤手术存在较高的术后并发症,如慢性低眼压、眼内炎等。于是,微创青光眼手术(minimally-invasive glaucoma surgeries,MIGS)由于其具有安全性高、创伤小的优点被逐步用做手术干预措施[5-6]。黏小管成形术(canaloplasty,CP)是MIGS中一种新型非滤过泡依赖性抗青光眼手术,创伤小、并发症少、恢复快,临床证实是一种较为安全有效的手术方式。术者在角巩膜缘的巩膜上做切口深至SC,并将直径小于250 μm的微导管引入SC的管腔中,使微导管在SC内环行360°从切口对侧穿出。随后在微导管末端系10-0缝合线并撤回。撤回过程中在管腔内注入黏弹剂使其扩张,然后将引入的缝合线系紧达到长期扩张SC和TM的目的。处于扩张状态的TM和SC恢复房水自然流出通路,从而降低眼内压。
然而在CP中尚无法直接测量缝合线张紧力的大小[7]和组织的扩张情况。前者主要由医生临床经验及间接方法判断,如利用在巩膜切口处缝合线张紧对薄膜组织的压痕来判断[8];后者主要通过成像的方式表征,大致可分为两类,第一类是在术前和术后用超生生物显微镜(ultrasound biomicroscopy, UBM)或光学相干层析(optical coherence tomography, OCT)成像对比SC和TM扩张前后组织形貌发生的变化,如SC的长径和短径或扩张引起的组织相对角度变化等[9-11]。Lewis等[9-10]研究发现,SC和TM的扩张与眼内压下降相关;第二类是用术中UBM或OCT进行成像[12]。这种方式虽然可以实现实时监测扩张,但易受成像深度和手术器械的影响。
要获得缝合线拉力与TM扩张的关系,首先要确定TM的力学性质。Camras等[13]将猪眼TM解剖出来,并用微应变分析仪进行单轴拉伸实验获得其杨氏模量为2.49 MPa,且得出结论刚度随应变的增大而增加;Yuan等[14]用原子力显微镜对猪眼TM做压痕试验测量其弹性模量为1.38 kPa。文献[15]指出测量结果差异巨大与测量方式的不同有关,两种方式分别表征组织整体与局部特性,且在压痕方式下测量值受压头的形状参数影响。目前,有限元方法已广泛应用于生物力学分析[16]。在TM力学性质研究方面,Chang等[17]模拟了垂直和平行于弹性纤维方向的大鼠TM压痕实验;Wang等[18]通过离体人眼的灌注试验和逆有限元方法求解TM弹性模量。
综上,缝合线张紧引起SC和TM扩张是CP中恢复房水流出通路、降低眼内压的重要操作。然而,这一过程目前尚无法直接测得缝合线拉力大小和TM扩张情况,无法量化表征力与扩张之间的对应关系。为此,针对黏小管成形术中缝合线扩张SC和TM的过程进行有限元仿真,获得量化表征缝合线拉力与组织扩张的对应关系,并用离体猪眼组织样品模拟手术中的扩张操作,记录缝合线张力和组织对应的变形,与仿真结果进行验证。基于CP手术原理建立缝合线扩张SC和TM的有限元求解模型,搭建实时缝合线拉力测量平台,开展离体猪眼小梁网扩张实验。通过量化的缝合线拉力与组织扩张的对应关系,预测相应拉力下组织的扩张情况,从而为医生术中实时决策提供依据,缩短学习曲线,提高手术精准性,优化患者预后。同时也为之后的手术机器人辅助眼科手术提供控制输入。
1 小梁网与施莱姆氏管组织有限元建模
1.1 仿真模型的建立

浅灰色为角膜;深灰色为巩膜;黄色为TM;红色为缝合线图1 含有缝合线、SC和TM的角巩膜缘模型Fig.1 Corneoscleral limbus model with suture, SC and TM
建立角巩膜缘模型如图1所示。SC和TM位于眼睛前房角的角巩膜缘处,角巩膜缘是角膜和巩膜移行区,因此可简化为截面绕对称轴回转形成的环状结构。为使模型贴近组织真实形貌,依据文献[19-20]的组织照片及尺寸描述,在Siemens NX 10中建立巩膜外缘、巩膜内缘、TM、SC和缝合线的三维实体模型。SC简化为单一理想环状管腔,其中SC长145 μm,宽30 μm[20],TM长450 μm,宽250 μm[19-20],巩膜厚1 000 μm,SC至回转轴的回转半径为6.75 mm[21](包含缝合线的管腔为SC)。由于采用轴对称建模,设置回转角度为0.2°生成小角度的实体模型,并导入有限元分析软件 ANSYS Workbench中。
对上述模型进行网格划分。为提高计算效率,TM和巩膜采用无中间节点的一阶线性四面体单元划分网格,缝合线采用无中间节点的一阶六面体单元进行网格划分。由于TM产生变形较大,因此将扩张过程分成多段进行分步求解,并逐步细化网格模型,整体网格单元尺寸为8 μm,局部细化至4 μm,平均网格质量为0.81,具有较好的网格,最终生成63 875个单元。
1.2 材料属性
在Engineering Data中设置缝合线、TM、巩膜的材料属性。手术中使用的是不可吸收聚丙烯10-0缝合线,由文献[22]可知其杨氏模量为3.449×109Pa。TM由薄层结缔组织形成空间网状结构,由上述可知当前研究中其弹性模量测量值相差巨大,并且组织在扩张过程中出现大变形。因此在组织扩张过程的前期和后期用两种杨氏模量不同的各向同性线弹性材料分别模拟,在上述测量值[13-14]范围内设置其杨氏模量为2.00×104Pa和1.00×105Pa以便分段累加求解。根据Bronte-Ciriza等[23]研究巩膜杨氏模量范围在(1.84±0.30)~(6.04±2.11) MPa,其值大于TM。因此在手术和实验中巩膜几乎不发生变形,力学性能用线弹性材料模型表征,生物软组织材料设为不可压缩材料,设置杨氏模量为1.95 MPa,泊松比为0.48。
2 组织扩张过程的仿真计算
2.1 边界条件设置与数值计算方法
在Workbench软件中对有限元模型施加载荷和边界条件。手术过程中,向前房注入黏弹剂维持眼压,巩膜不发生变形,因此将其分成两层,外层作为刚体,设置固定边界条件。内层与外层设置绑定接触,同时内层与TM设为共享拓扑,保证巩膜与TM间不发生分离,接触面节点一一对应。由于术中无法确定缝合线相对SC管腔的具体位置,设置其一般位置如图1所示。缝合线与TM接触面设为摩擦接触,摩擦系数为0.15[24]。在手术过程中,用缝合线向内收紧扩张TM,因此设置缝合线沿径向指向回转轴的强制位移,拉伸TM模拟手术过程。TM产生大变形,求解设置中打开“Large Deflection”以调整刚度矩阵,每次求解最小子步为50,最大为100,用牛顿拉夫森法迭代求解至收敛。并将上一次的求解结果导入本次求解中,保证分段求解中TM模型的连续变形。每次求得固定边界条件上的支反力Frβi(图2)即为缝合线作用于小梁网上力的大小。由于采用轴对称小角度建模,模型两个端面设置为对称面,并且可以认为缝合线拉紧时,拉力沿线的方向即沿线端面的法向向外且在小角度下线两端上力F、F′大小相等,则支反力Frβi可由该力的分力Fr、F′r表示(图2)。缝合线扩张宽度δtotal可表示为上述强制位移δi[图3(a)]之和。

图2 缝合线扩张SC和TM径向受力分析Fig.2 Radial force analysis of the suture expanding SC and TM
(1)
缝合线上拉力可表示为
(2)
式中:n为总体变形中分段求解的段数;δi为第i段模拟中缝合线的强制位移量;Frβi为中心角为β的模型第i段中缝合线的径向合力。
2.2 仿真结果与分析
SC和TM的扩张程度用缝合线对组织的扩张宽度表示,即缝合线强制位移的大小。在扩张前期TM杨氏模量为2.00×104Pa,此时,随着缝合线强制位移增加,SC、TM被逐渐扩张,每一步求解结果的组织最大变形均出现在其与缝合线接触区域周围,这与实际变形情况相同,最大应力也出现在与缝合线接触处,并且应力可以在TM与巩膜间较好传递,证明接触较好,巩膜未发生变形是由于弹性模量差异巨大而引起的。随着TM变形,产生最大变形处逐渐变薄,刚度逐渐降低,因此随着拉力的增加,在恒定弹性模量下,扩张宽度的变化量逐渐增大。在缝合线张力为19.9 mN,扩张宽度为210 μm时将弹性模量增加至1.00×105Pa,此时由于TM弹性模量增加,扩张宽度随缝合线拉力增加速度减缓,最终当拉力为57.3 mN时,扩张宽度增加至390 μm。模拟求解结果及拉力与扩张宽度关系如图3、图4所示。

图3 缝合线扩张SC和TM的变形,应力仿真结果Fig.3 Deformation and stress simulation results of the suture expanding SC and TM

图4 拉力与扩张宽度的模拟结果Fig.4 Simulation results of tension vs. dilation width
3 实验设计
3.1 实验材料
由于猪眼的外形尺寸、生理结构与人眼相似,且廉价易得,因此采用猪眼进行实验验证,模拟手术中缝合线扩张TM的过程。采用当天宰杀的离体猪眼球,将其解剖去除玻璃体、晶状体、虹膜、睫状体等组织,保留包含角巩膜缘在内的眼前节。选择颞侧一个象限的眼前节组织固定在显微镜下。将100 μm镍钛丝与缝合线固结,并从组织断面确定TM和SC的位置,将镍钛丝插入SC内,沿管腔穿出,将缝合线引入SC,完成猪眼样品组织穿线操作,如图5所示。

图5 实验组织样品(屠宰24 h内猪眼球)Fig.5 Experimental tissue sample (porcine eye within 24 hours of slaughter)
3.2 实验平台
整体实验设计如图6所示,其中定制支架球面半径为7.5 mm,由猪眼角膜半径确定,用于支撑固定准备好的眼组织,简单恢复其空间形貌模拟术中眼球。由于光纤光栅传感器(FBG)的直径小,柔顺性好且灵敏度高,因此用于测量沿缝合线方向的实时拉力值。定制支架安装于位移平台,平台水平右移用于提供缝合线与组织样品间的相对运动。显微镜摄像头用于记录实验中组织的扩张变形,同步采集平台位移、缝合线拉力、组织扩张宽度数据,即可获得拉力与组织扩张的对应关系。
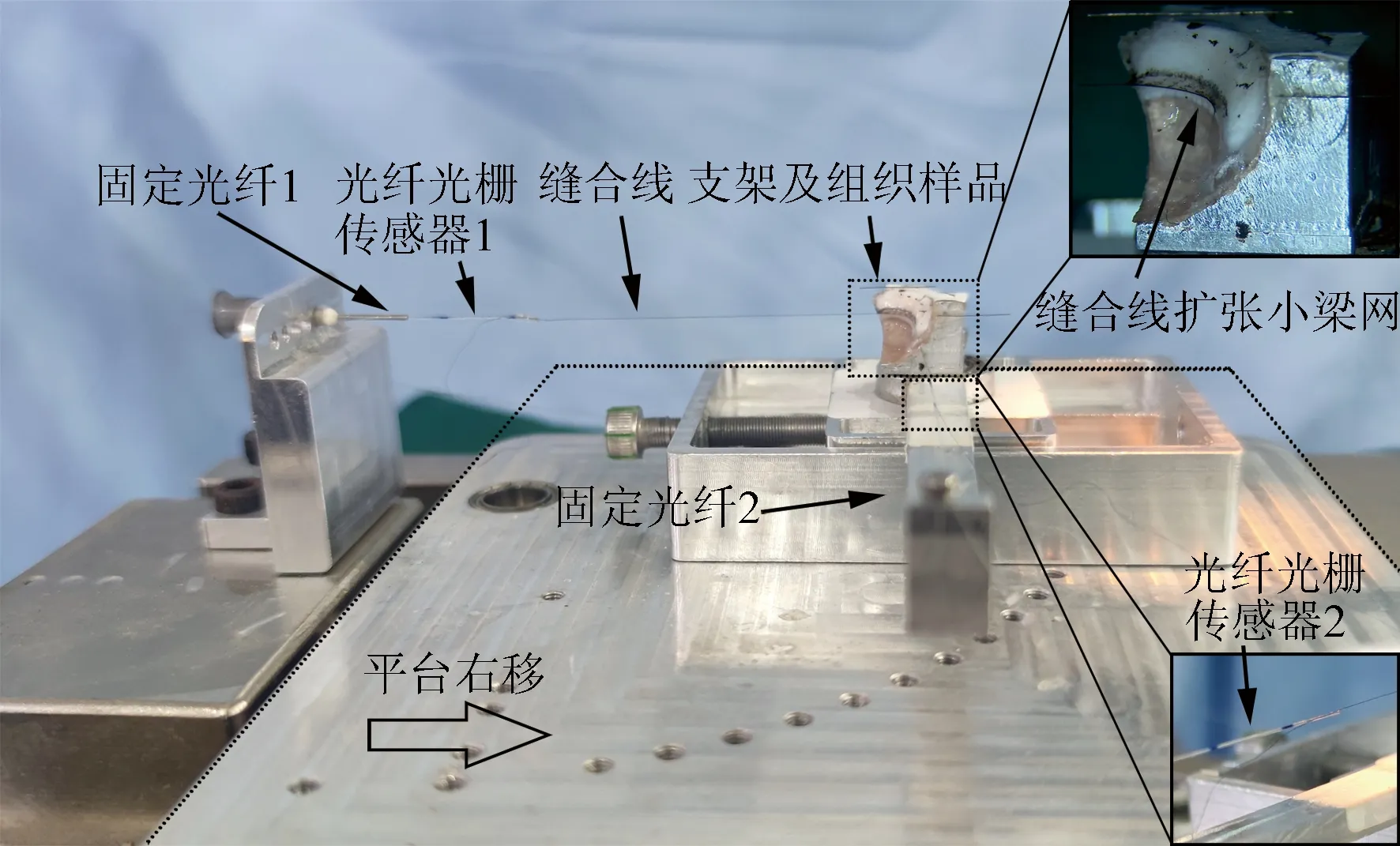
图6 缝合线扩张施莱姆氏管和小梁网实验过程Fig.6 Experimental process of suture expanding SC and TM
实验时,首先将组织样品的角膜、巩膜外表面小心的固定在支架上,并将支架安装于位移平台。穿过SC的缝合线两端分别与固定在支架上的光纤相连,此时微调位移平台,使缝合线处于张紧的临界状态。实验中使平台水平移动,组织样品与缝合线产生相对运动,模拟手术中缝合线扩张SC和TM的操作。实验完成了从开始扩张直至SC和TM破坏的过程。该过程同时记录了FBG测量的拉力值、位移平台表头记录的位移值、显微镜摄像头记录的眼组织的扩张情况。
3.3 实验结果与分析
利用上述实验平台模拟了SC和TM被缝合线扩张直至组织完全破坏的过程,并获得了平台位移与缝合线拉力、缝合线拉力与组织扩张宽度的关系。
3.3.1 整体实验过程分析
在位移与拉力的关系中,随着平台位移增加,组织与缝合线产生相对运动,缝合线被逐渐张紧,SC和TM开始扩张变形。如图7所示,整体扩张过程可分成2~3个阶段:第一阶段,缝合线张力随着位移增加而增大,虽有波动但基本成线性趋势,组织无明显破坏;随着拉力进一步增加,组织将出现部分破坏,此时拉力将急剧下降,或者表现为随着位移增加,缝合线拉力先出现小范围的平稳,不再增长然后急剧下降。第二阶段,如果只产生部分破坏,下降至某一值附近后,剩余组织仍可继续承受缝合线扩张,拉力值可再次随位移增加,或趋于平稳;随着位移进一步增大,大部分组织破坏进入第三阶段,拉力再次突变下降至极小值,此时仅有残余组织勾连,可认为完全破坏。部分实验中第二阶段不明显。因此选择组织无明显破坏并具有线性趋势的第一阶段进行分析,此时平台位移范围为0~2 mm。
由图7可以看出,在扩张过程中缝合线两端拉力值有一定差异,先产生变形的一侧(FBG1)拉力值较大。在没有阻力的理想情况下,缝合线张紧后,线上的力应沿线的方向且大小相等。在没有发生明显破坏的第一阶段中,两侧力之差逐渐增大,在出现破坏以后,两条曲线突变点及突变趋势一致,差值明显减小,当几乎完全破坏时,测量值又基本一致,因此,两端差值可以认为是缝合线受到组织变形的阻力。在0~2 mm范围内用缝合线两端测量值作差,可得在SC和TM上产生阻力的大小及其与位移的关系。如图8所示,随平台位移增大,缝合线阻力逐渐增大,且基本成线性趋势。阻力最大值为40.6 mN最小值为33.9 mN。虽然在实验过程中注意给被扩张的组织补生理盐水,避免失水变性。但相较于实际手术中眼前节处于充满房水的非开放状态,因此仍有一定差距。

图7 平台位移与缝合线拉力曲线Fig.7 Platform displacement and suture tension curves

图8 平台位移与缝合线阻力曲线Fig.8 Platform displacement and suture resistance curves
3.3.2 0~2 mm内拉力-扩张宽度分析
在上述的0~2 mm的位移范围内,选择拉力较大一侧即FBG1侧的6组实验数据,绘制拉力-扩张宽度曲线如图9所示。5组实验中拉力的上下限范围,在平台位移2 mm处,拉力最大值为66.6 mN,最小值为55.1 mN。

黑色曲线为出现破坏的对照组,表现为随着位移增加,拉力在略大于70 mN处短时趋于平稳,而扩张宽度急剧增大;组1~组5为无明显破坏的实验组图9 0~2 mm内拉力-扩张宽度曲线Fig.9 Tension-dilation width curves within 0-2 mm
在平台0~2 mm位移中,SC和TM变形如图10(a)和图10(b)所示,缝合线向内收紧扩张组织。因此用缝合线扩张宽度表示组织变形情况。而图10(c)和图10(d)表示出现部分和完全破坏。由于SC和TM结构微小,难以直接测量,所以在显微镜视图中,选择已知尺寸的参照物和参照点,通过Image J软件计算已知参照物的像素尺寸和实际尺寸获得全局比例尺,进而在显微镜图像上标定相对参照点的扩张宽度,由全局比例尺计算实际组织扩张宽度。
在实验组中,扩张宽度随拉力增加而逐渐增大,无急剧变化,且基本成线性关系,经线性拟合R2为0.84。拉力变化范围为55.1~66.6 mN,而相应的扩张宽度变化范为297.8~404.6 μm。但具体变化趋势不尽相同,如在组1和组2中变化较为均匀,而在组3~组5中则呈现前期扩张宽度随拉力增加增长较快,而后期增长较缓的趋势,这与组织样本之间的差异性有关,猪眼SC呈现节段性,并非完全理想化的均一结构。同时在图上以加粗蓝线示出了有限元仿真结果,可见模拟分析结果与实验验证呈现相同趋势。
3.3.3 0~2 mm内扩张过程的验证
由于实验材料具有不可重复性,每个制备好的实验样本仅能完成1次实验。为了验证上述5组实验中在0~2 mm范围内扩张时组织没有发生明显破坏,并可以简化认为上述范围的扩张是弹性扩张。在位移到达2 mm后进行卸载,位移平台逐渐恢复至0 mm初始位置,然后再进行二次加载,直至组织完全破坏。图11描述了缝合线拉力较大一侧的实验过程,黑色曲线表示第一次加载,红色曲线表示卸载过程,可以看出缝合线上拉力卸载较快,并未沿加载曲线变化,在0.9 mm位移处降至4.9 mN,这说明在扩张过程中已经产生了组织松弛,并非完全的弹性变形。蓝色曲线表示第二次加载过程,在加载至0.6 mm时,拉力为3.1 mN,此前虽然出现波动但无明显拉力增加,之后基本与第一次加载曲线保持一致,在第二次加载至2.0 mm时,拉力为64.7 mN与第一次的59.3 mN比相差很小(表1),而且可以继续保持线性趋势变化,这表明在0~2 mm范围组织没有出现明显破坏,卸载后再次加载可以恢复至首次加载水平。并且上述区间扩张过程可以近似看作是弹性扩张。

图10 组织扩张过程Fig.10 The dilation process of tissue

图11 二次加载的位移-拉力曲线Fig.11 Platform displacement and suture tension curve of reloading

表1 平台位移二次加载至2 mm的拉力结果Table 1 The tension results of the platform displacement reloading to 2 mm
Fuest等[25]通过AS-OCT成像的方式测得了患者术后SC在缝合线扩张下的平均宽度为380.2 μm,且由分布图可知宽度区间在300~500 μm。而图11中5组实验结果的平均扩张宽度为360.3 μm,与文献[25]参考范围基本一致。参考上述范围,在实验组间选择297.8~404.6 μm的扩张宽度区间进行分析可以发现拉力范围为34.1~66.6 mN。而有限元模拟结果中当扩张宽度为300~390 μm时,缝合线拉力范围为43.5~57.3 mN,分布于实验结果范围内。因此通过参考扩张宽度结合拉力-扩张宽度关系可以给出缝合线拉力的对应范围,获取量化的拉力值。
4 结论
建立了包含缝合线、SC、TM和巩膜的数值求解模型,模拟CP中缝合线扩张SC和TM的过程,应用有限元法求解了缝合线拉力与组织扩张宽度的量化关系。建立了实时缝合线拉力测量平台,在猪眼组织的SC中穿入缝合线完成扩张操作,测量缝合线上实时张紧力与组织扩张的实验数据,获得拉力-扩张宽度曲线,实验结果与仿真结果呈现相同趋势。实验中应用卸载后二次加载的方法验证了实验组中平台位移在2 mm范围内组织无明显破坏,虽然并非完全弹性变形,但可以简化认为是弹性拉伸过程,在再次恢复至2 mm平台位移时,缝合线拉力与首次加载基本一致。针对当前无法直接测量缝合线拉力的问题,应用有限元分析法结合实验验证获得了量化的缝合线拉力与扩张宽度对应关系,可预测相应拉力下组织扩张情况,缩短医生学习曲线,提高手术精准性。同时也为机器人辅助眼科手术提供控制信息输入。
猜你喜欢
中国眼耳鼻喉科杂志(2022年5期)2022-09-21
计算机仿真(2021年3期)2021-11-17
纺织科学研究(2021年5期)2021-06-03
纺织学报(2021年5期)2021-05-27
航空发动机(2020年3期)2020-07-24
中国医学物理学杂志(2019年11期)2019-11-29
中医眼耳鼻喉杂志(2019年2期)2019-04-13
中国眼镜科技杂志(2018年1期)2018-02-08
发明与创新·中学生(2018年2期)2018-02-07
时代英语·高二(2017年4期)2017-08-11