悬架系统振动特性的非平稳虚拟激励法研究*
2022-05-21 03:10张步云TANChinAn李韶华
振动、测试与诊断 2022年2期
张步云,戴 涛,TAN Chin-An,李 江,张 勇,李韶华
(1.江苏大学汽车工程研究院 镇江,212013)
(2.韦恩州立大学机械工程学院 底特律,48202)
(3.南京金龙客车制造有限公司 南京,210000)
(4.石家庄铁道大学省部共建交通工程结构力学行为与系统安全国家重点实验室 石家庄,050043)
引言
平顺性作为车辆行驶品质评判标准以及司乘人员体验的重要特性,受到越来越多的关注。既往研究多集中于车辆悬架系统振动特性[1-3]的分析与优化,主要针对车辆匀速行驶工况下悬架系统的频响函数进行分析。许多情况下,车辆都是非匀速行驶的,此时悬架系统的振动为非平稳随机过程,研究对象及其分析方法都与平稳随机过程显著不同。
通常采用时频分析方法对非平稳随机振动进行分析,但传统时频分析方法大都存在一定的局限性。如短时傅里叶变换(short time Fourier transform,简称STFT)[4-5]通过选择时频局部化的窗函数,提取非平稳信号中有限时间宽度内的平稳信号,从而得到时变功率谱,但STFT 无法同时在时间与频率分辨率上达到最优。小波变换[6-8]是空间(时间)和频率的局部变换,通过伸缩平移等运算对函数或信号进行不同尺度的细化分析,反映了整个信号的时间频谱特性,但缺乏时间局部性,难以确定奇异点发生的时间和分布情况。希尔伯特-黄变换[9-11]利用经验模态分解方法将给定的信号分解并进行希尔伯特变换,得到相应的希尔伯特谱后进行整理得到总谱,但是该方法无合理的物理意义。Prestley[12]提出的演变谱理论能有效避免上述时频分析方法带来的问题,得到了比较广泛的研究。在演变谱理论中,非均匀调制函数是使平稳随机过程转化成非平稳随机过程的关键。周广东等[13]基于小波变换原理推导了非平稳随机脉动风的非均匀调制函数,建立了时变功率谱估计的小波函数加权和法来进一步理解强风的随机脉动特征。范增磊[14]通过广义谐和小波,推导了非平稳过程演变功率谱的非均匀调制函数估计公式,并分析了Bouc-Wen 系统的非平稳响应。研究表明,非均匀调制函数作为演变功率谱中的重点,推导过程较为复杂,不具有工程应用的普遍性,目前只在土木、地震、阵风等少数领域有一些深入的研究,在其他领域振动结构模型中少有适用的非均匀调制函数。演变功率谱理论在求解大型振动系统多输入多输出问题中,需要生成许多离散频点的矩阵进行连乘和多重积分,计算极为复杂。对此,文献[15-17]从实际工程问题出发,对演变谱理论的求解方法进行改进,提出求解结构非平稳随机响应的虚拟激励法,简称非平稳虚拟激励法。该方法将复杂的非平稳随机激励转变成虚拟简谐激励,易于理解与计算,且理论上足够精确。在该方法中,只需要确定非均匀调制函数,即可快速求解得到演变功率谱,大大节省了计算时间,已在工程领域广泛运用[18-22]。但截至目前,在车辆非平稳随机振动最为关注的时频域分析领域中,非平稳虚拟激励的非均匀调制函数还没有明确的表达式,虚拟激励法这方面的应用在文献中仍较少出现。
笔者基于白噪声谐波叠加法推导了非平稳虚拟路面激励的非均匀调制函数表达式,由此得到单轮路面非平稳虚拟激励。利用协方差等效法,解决车辆非匀速行驶时前后轮之间的变时差问题,得到后轮非平稳虚拟激励。将前后轮非平稳虚拟激励代入动力学方程,利用精细积分法计算求得车辆垂向加速度时域-频域三维演变功率谱,并将演变功率谱与STFT 方法求得的时频功率谱进行比较来验证其正确性。最后对车辆匀速/非匀速两种行驶工况下车辆垂向振动响应共振区的动态特性进行分析比较,并以样车在不同加速度路面激励下的四立柱台架试验对仿真结果进行验证。
1 非平稳随机过程的建模
1.1 非平稳虚拟激励法
在非平稳随机振动中,可通过非均匀调制函数和Riemann-Stirltjes 函数[12]将自谱为Sxx(ω)的零均值平稳随机过程转化为非平稳随机过程

其中:A(ω,t)为非均匀调制函数。
其中:δ为Dirac 函数;*表示共轭。
f(t)的演变功率谱Sff(ω,t)可表示为

若通过虚拟激励法[16]构造非平稳虚拟激励

则可以利用(t)的复共轭相乘得到与式(3)相同的非平稳激励演变功率谱

将式(4)中的非平稳虚拟激励作为输入,代入不同的振动系统模型,求解后得到非平稳虚拟响应(ω,t),再利用复共轭相乘得到非平稳响应的演变功率谱S(ω,t)。由式(3)~(5)可以看出,只要得到非均匀调制函数A(ω,t),就可通过虚拟激励法求出系统响应的演变功率谱密度。但在绝大多数的振动系统中,推导非均匀调制函数的过程较为复杂。下面将推导车辆在非平稳随机运行过程中,适用于路面非平稳随机激励的非均匀调制函数。
1.2 非均匀调制函数
通常以空间域功率谱密度Gq(n)来描述路面不平度[23]的统计特性,其表达式为

其中:n为空间频率;n0=0.1 m-1为参考空间频率;Gq(n0)为路面不平度系数;ς为分级路面谱的频率指数,通常取2。
利用空间频率n和空间角频率Ω的关系Ω=2πn,并给定空间截止角频率Ωc,可以将式(6)写成

求出空间频率响应函数H(Ω)

其中:GW(Ω)为白噪声W(s(t))的功率谱密度,s(t)为车辆行驶路程。
在式(8)两端同时进行空间频率下的傅里叶逆变换,展开后得到微分方程为

其中:W(s(t))为参数化白噪声。
W(s(t))无法直接用于数值计算。笔者利用W(s(t))和的协方差等效[24],即
将式(9)改写为

式(11)中的q(t)即为单轮滤波白噪声法生成的时域非平稳随机路面激励。
根据非平稳虚拟激励法的定义式(4),构造白噪声虚拟激励

作为路面时变系统的虚拟输入,得到路面系统的虚拟输出为

将式(12)和式(13)代入式(11),得到

代入全部参数,得

进一步化简,得
式(17)为一阶微分方程,求解得到车辆单轮非平稳虚拟激励法的非均匀调制函数为
其中:C为常数,由初始条件决定。
利用式(10)和式(18)求得单轮非平稳虚拟激励通用模型(ω,t),即

2 后轮非平稳虚拟激励
车辆直线行驶时前后轮所经历的路面完全相同,时差记为τ。当匀速行驶时,τ为常数。根据前轮虚拟白噪声=(ω,t),可得到后轮的虚拟白噪声=(ω,t-τ),代入式(18)即可得到后轮路面非平稳虚拟激励的非均匀调制函数Ar(ω,t)。
但当车辆非匀速行驶时,τ(t)将随着车速变化而变化,此时后轮激励方程为

由于后轮白噪声虚拟激励输入(ω,t-τ(t))亦为参数化虚拟白噪声,仍利用协方差等效法将其转化。(ω,t-τ(t))的协方差为


式(21)与式(22)等效,因此式(20)可写为
(ω,t)代入式(23),可以求得后轮非均匀调制函数Ar(ω,t)和路面非平稳虚拟激励(ω,t)。
3 车辆非平稳随机振动响应
3.1 1/2 车辆动力学模型
图1 所示为1/2 车辆悬架系统模型,其中:车身质量为mc;俯仰转动惯量为Jc;前后轮到车身质心的距离分别为a,b;前后轮质量分别为mt1,mt2;前后悬架弹簧刚度分别为k1,k2;阻尼系数分别为c1,c2;前后轮胎刚度分别为kt1,kt2。路面垂向位移分别为q1,q2;前后车轮的垂向位移坐标分别为zt1,zt2;车身质心的垂向位移坐标为zc;俯仰角为φc。坐标原点选在各自平衡位置,行使方向如图中箭头所示。
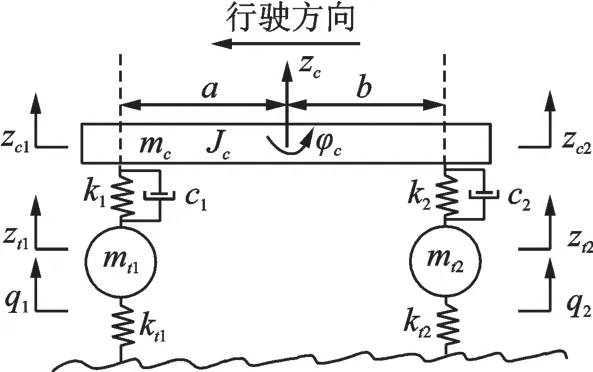
图1 1/2 车辆悬架系统模型Fig.1 Half vehicle suspension system model
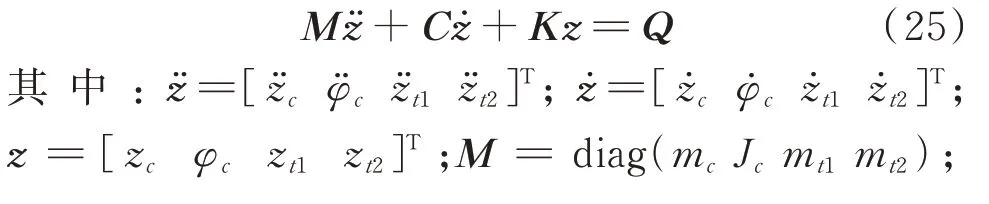
建立1/2 车辆模型运动微分方程
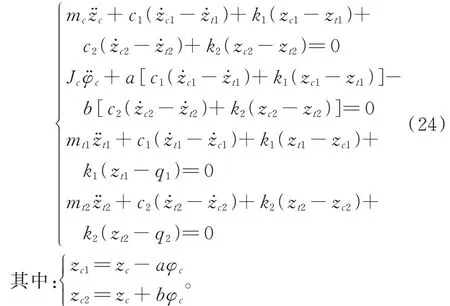
将其写成矩阵形式

3.2 悬架非平稳随机加速度响应计算
根据式(19)、式(23)能依次得到1/2 车辆模型中的前后轮非平稳虚拟路面激励(ω,t) 和(ω,t),分别乘以前后轮胎刚度kt1和kt2,得到车辆非平稳虚拟激励输入

将(ω,t)代入式(25),该方程变为

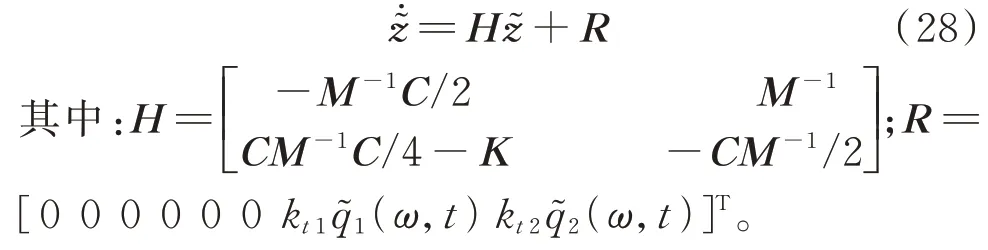
将式(27)写成Hamilton 体系下的动力学方程
设在ti时刻悬架振动响应量为,则在ti+1=ti+Δt时刻的悬架振动响应量为
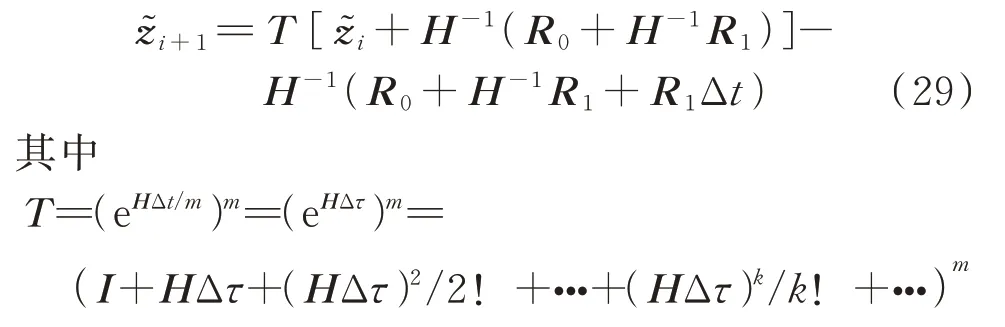
通过精细积分法[25]求得1/2 车辆模型的非平稳车身垂向加速度虚拟输出(ω,t),由式(4)进一步分析计算得到车身垂向加速度虚拟响应的演变功率谱密度为

式(30)可以同时分析车辆响应在时域和频域两方面的能量分布情况,并且在理论推导上不存在误差,相比传统时频分析方法有着更高的精度。
4 仿真计算
构建1/2车辆模型以0 m/s的初速度、3 m/s2的加速度在C级路面上直线行驶10 s,参数设置见表1。
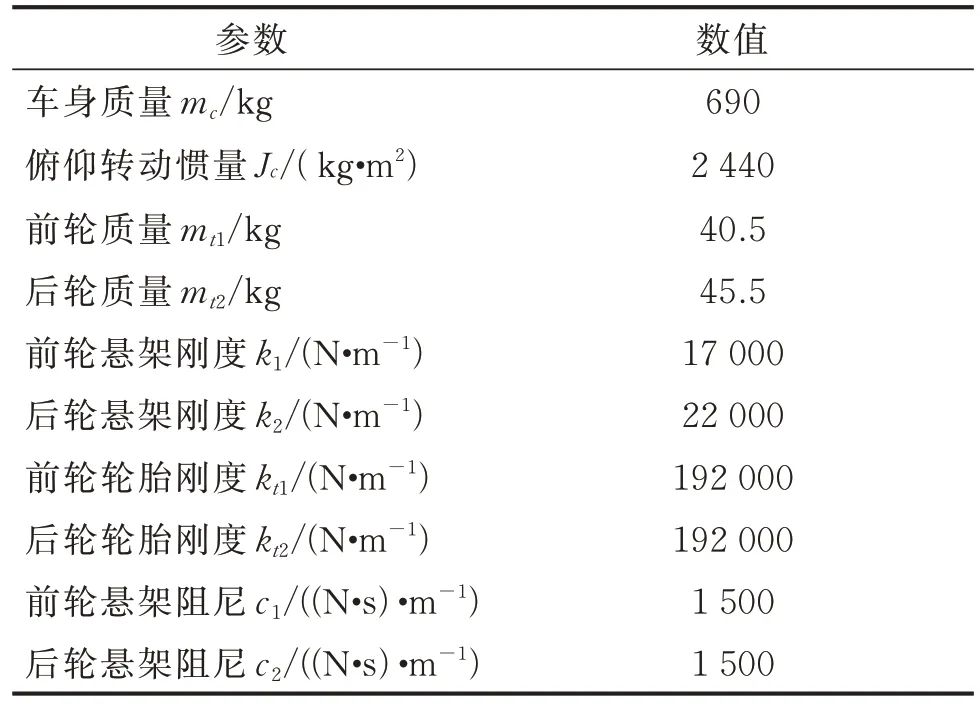
表1 1/2 车辆悬架系统模型参数Tab.1 Parameters of the half vehicle suspension system model
4.1 路面非平稳虚拟激励演变功率谱
为检验上述推导的正确性,分别对路面非平稳虚拟激励和车辆非平稳虚拟响应的演变功率谱结果与传统时频分析结果进行比较,设定两种方法的采样频率均为100 Hz。
图2 所示为利用式(19)、式(23)得到的车辆前后轮路面非平稳虚拟激励输入的演变功率谱密度。由于路面时间频域上的激励主要集中于低频率内,故图中的频率范围锁定在0~2 Hz 内。
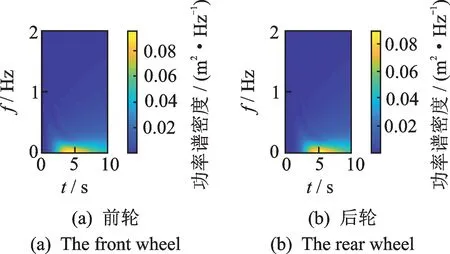
图2 路面非平稳虚拟激励演变功率谱Fig.2 Pavement non-stationary pseudo excitation evolution power spectrum
由图2 可以看出,当车辆的行驶速度不断增加时,路面时频谱激励内的低频激励峰值逐渐减小,而中高频激励峰值逐渐增大,即路面的输入能量随车速的增加逐渐向较高频域内移动,激励频域范围变大,峰值减小。该结果与路面激励的“滚动特性”相一致。
图3 所示为利用文献[26]提及方法生成的车辆前后轮时域路面非平稳高程输入。利用STFT 对其进行时频分析,得到车辆前后轮所受激励的时频域功率谱密度的三维图,如图4 所示。
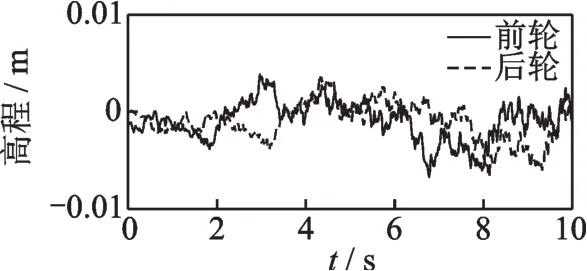
图3 路面非平稳时域激励Fig.3 Pavement non-stationary time-domain excitation
图2、图4 所示时频谱的采样频率均为100 Hz,将两者相比较后可以发现,运用笔者推导的路面非平稳激励演变功率谱与非平稳激励时域信号的STFT 结果基本一致,并且路面能量主要分布于5 Hz以下,这一结论与文献[27]中仿真路面谱以及文献[28]中的实测路面结果一致。但笔者所提出的方法不论在时间域还是频率域都有较高的分辨率。
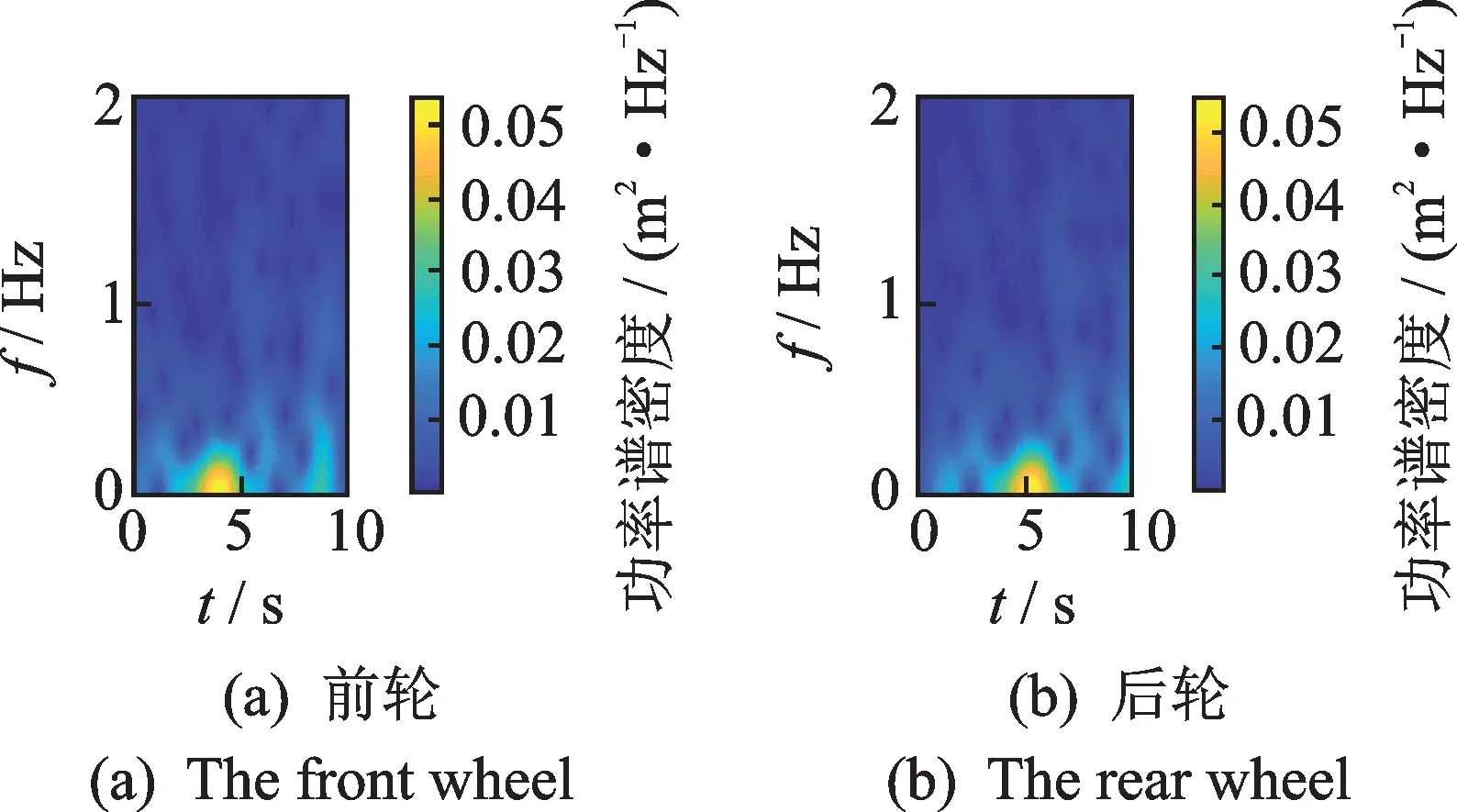
图4 路面非平稳时域激励STFT 功率谱Fig.4 Pavement non-stationary time-domain excited STFTpower spectrum
4.2 车辆非平稳虚拟响应演变功率谱
图5 所示为利用式(30)所求的车辆垂向加速度虚拟响应的演变功率谱密度。
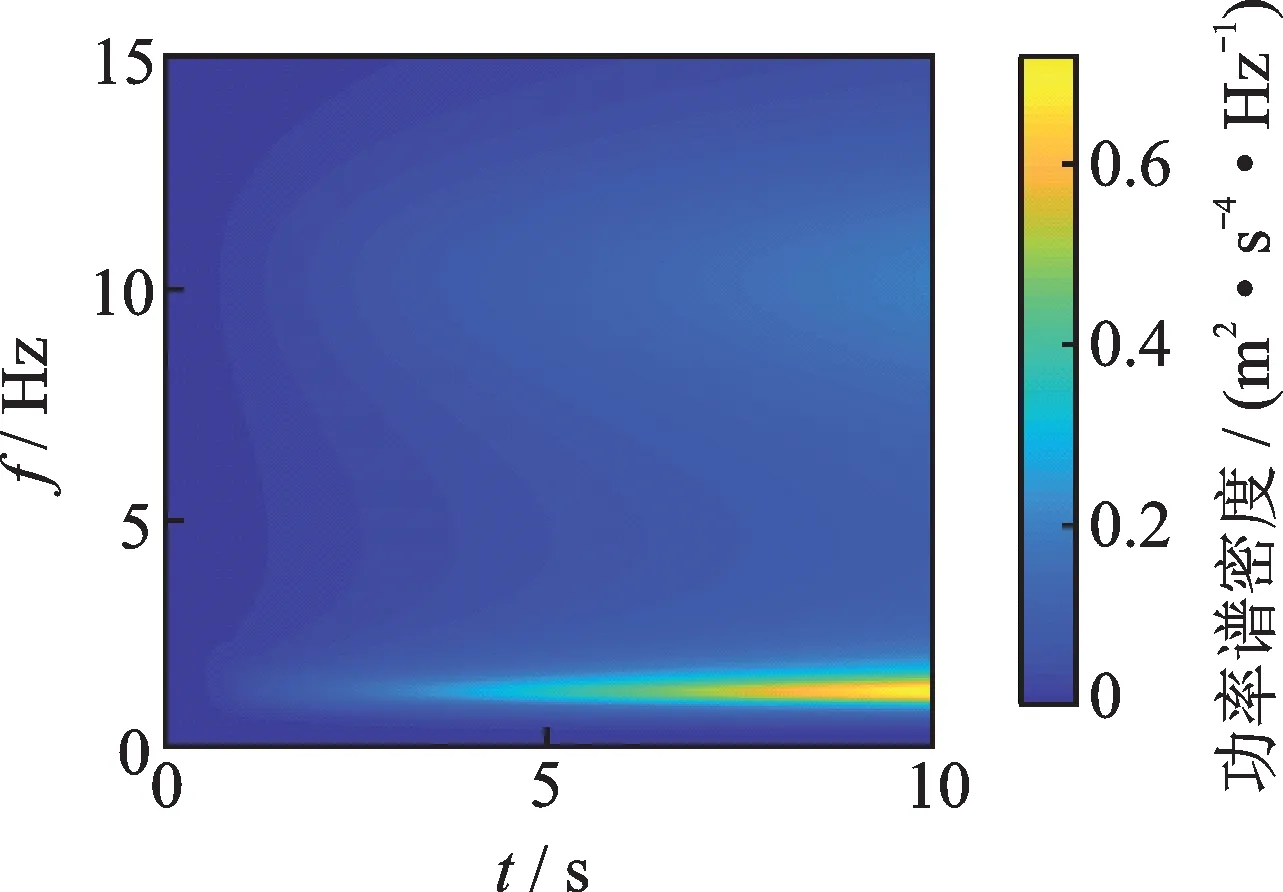
图5 车辆匀加速时垂向加速度虚拟响应演变功率谱Fig.5 Evolutionary power spectrum of pseudo response of vertical acceleration during uniform acceleration of vehicles
图6 所示为利用文献[26]生成车辆非平稳垂向加速度响应时域图。利用STFT 对其进行时频分析分析,得到车辆垂向加速度响应的时频域的功率谱密度,如图7 所示。由图5 可以看出,车辆的车身垂向加速度功率谱密度分别在1 Hz 和10 Hz 处达到了峰值,并且随着车速的增加,车身垂向加速度的幅值也在不断增大。该结果与图7 中STFT分析结果完全一致,也与理论上车辆在一阶、二阶固有频率(1 Hz 和10 Hz)上会出现共振峰值的理论相吻合。
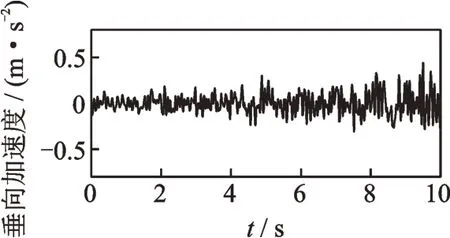
图6 车辆非平稳垂向加速度时域响应Fig.6 Time-domain response of vehicle non-stationary vertical acceleration

图7 车辆非平稳垂向加速度响应STFT 功率谱Fig.7 Vehicle non-stationary vertical acceleration response STFT power spectrum
通过分析非平稳虚拟激励法与STFT 时频分析在相同采样频率下的结果可以发现,两种方法得到的道路激励输入和车辆响应输出的功率谱密度都与理论知识高度吻合,结果具有较高的准确性和可信度。STFT 主要是使用窗函数对非平稳随机信号进行计算分析,无法同时在时域和频域上都得到精确的结果,只能大体观察非平稳随机振动的时频变化趋势,不能进一步探求非平稳信号的细节变化情况。而非平稳虚拟激励法是利用数学方法进行直接计算,可以保证所得的结果在理论上有足够高的精度,能描绘非平稳随机振动功率谱的细节变化情况,有非常高的分辨率,可具体分析某个振动信号在时频域上的微小变化,避免了传统时频分析方法无法显示细节的问题。利用该方法可以精确分析车辆非平稳随机振动的动态特性。
4.3 车身垂向加速度共振区动态特性
车辆系统的剧烈振动不仅在固有频率处会出现,在其附近的频段内也会出现振动幅值明显上升的现象。本研究定义车辆系统固有频率处共振峰值下降到1/倍所对应的频段为共振区,现对平稳和非平稳两种车辆行驶工况下的共振区动态特性进行分析。由于车辆在匀速行驶时所产生的振动为平稳随机振动,故只需要对其频域上的功率谱进行分析。利用虚拟激励法,车辆以5,15,25 m/s 3 种不同速度时的车身垂向加速度功率谱如图8 所示。以0.03 m/s 为间隔,分别求取0~30 m/s 内所有匀车速行驶时车身垂向加速度响应的二维演变功率谱,并将其组成时频域的功率谱的三维图,如图9 所示。
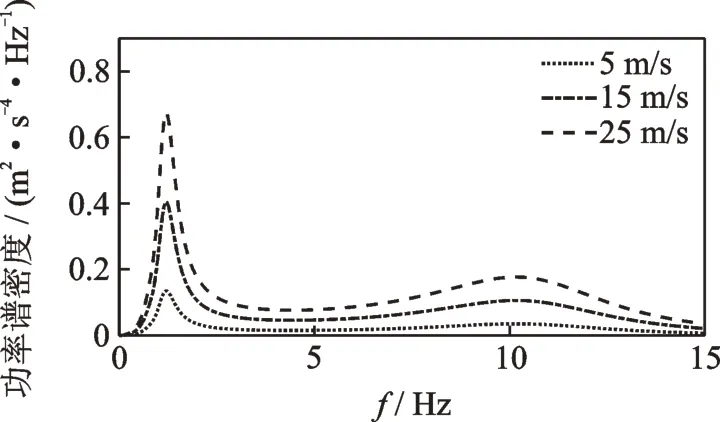
图8 车辆平稳垂向加速度响应演变功率谱Fig.8 Power spectrum of vehicle steady vertical acceleration response evolution

图9 车辆平稳垂向加速度响应功率谱三维图Fig.9 Three-dimensional graph of power spectrum of vehicle's steady vertical acceleration response
由图9 可以看出,不论车辆行驶的车速是多少,只要车辆处于匀速行驶工况中,则车身垂向加速度响应的共振区始终保持8~12 Hz 的频率区间内,不会发生任何变化,如图9 中红色直线所示。将匀车速下的平稳行驶工况和3 种加速度(1.67,2.78,3.33 m/s2)下的非平稳行驶工况共4 种行驶工况下的车身垂向加速度演变功率谱进行比较,截取在共振频率为10 Hz 左右的共振区动态变化,见图10。
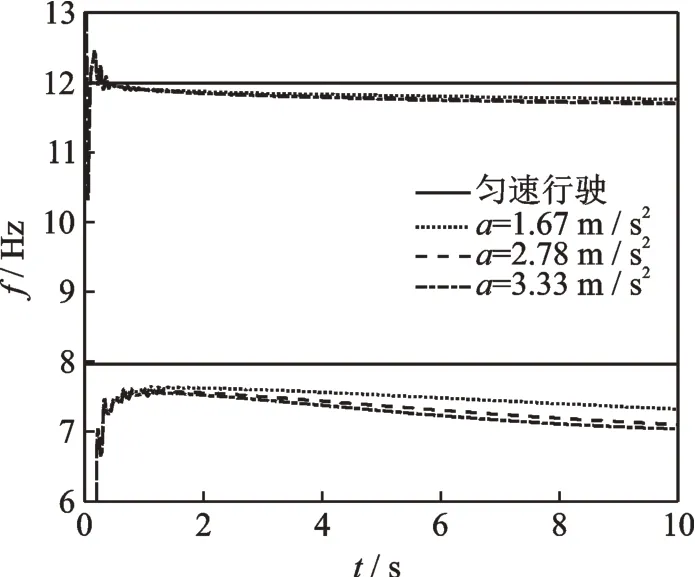
图10 车身平稳/非平稳振动响应共振区动态特性Fig.10 Dynamic characteristics of vehicle body with stable/non-stationary vibration response in resonance zone
观察图10 可以发现:当车辆非匀速行驶时,共振区的频率区间不再保持不变,而是会随着车速的增加而扩大,主要表现为共振区的频率上限和下限均向较低频率处扩张,且频率下限扩张速度高于频率上限的扩张速度;车辆垂向振动共振区的扩张速度与车辆行驶加速度成正比,即当车辆加速行驶时的加速度越大,共振区扩大速度就越快。共振区的变化特性是车辆匀速行驶与非匀速行驶时悬架系统描述时频域振动特性的重要区别,是车辆非平稳随机振动控制必须考虑的重要因素。
5 试验验证
在车辆行驶过程中,车身悬架振动特性会受到多个激励源的影响,如发动机激励和路面激励等。本研究主要考虑路面激励对车身振动的影响,故需要规避额外激励,因此试验设计为四立柱台架垂向振动试验。
首先,设计两种试验工况:①试验车辆在水平沥青路上以0 km/h 的初速度匀加速直线行驶8 s 至20 km/h 时停止,加速度为0.69 m/s2;②试验车辆在水平沥青路上以0 km/h 的初速度匀加速直线行驶8 s 至100 km/h 时停止,加速度为3.47 m/s2。通过该两种工况可以分析车辆在不同加速度行驶过程中悬架振动的变化特性,从而对第4 节仿真结论进行验证。其次,将车载电子控制单元用CAN 线连接到HEAD 数采系统中,在电脑上实时监控车辆的行驶速度;在4 个车轮上分别安装4 个加速度传感器,用于采集加速行驶时的道路时域路谱,反馈到四立柱试验台架上进行路谱迭代;在副驾驶座椅导轨上安装一个加速度传感器用于获得四立柱试验台架激励时的车身垂向加速度响应。最后,利用LMS 软件进行数据的分析处理,试验流程如图11 所示。图12,13 所示为车辆在试验工况1 和工况2 下副驾驶座椅导轨处垂向加速度的时频分布。

图11 试验流程Fig.11 Test process
已知试验车辆系统的二阶固有频率为17 Hz,如图12,13 中红色虚线所示,对不同加速度车辆悬架系统共振区的变化特性进行分析。由图12 可知,若车辆以较小加速度0.69 m/s2行驶时,共振区的频率上限基本不变,始终保持在22 Hz 左右;下限频率略有下降,但变化不明显,维持在12 Hz 左右,悬架系统的共振区并没有明显出现朝高频率或者低频率处扩张的趋势。由图13 可知,当车辆以较大加速度3.47 m/s2行驶时,悬架系统发生共振的高频区域变化幅度较小,频率上限维持在22 Hz 左右;而低频区域出现了明显的变化,频率下限由起步时的12 Hz逐渐下移到了10 Hz 左右。该试验结果所描述的车辆悬架系统在非匀速工况下的动态特性与仿真结果一致,即当车辆加速行驶时,悬架系统发生共振的共振区会随着车速的增加而向低频区域扩张,并且车辆行驶加速度越大,共振区扩张的越快。

图12 工况1 导轨垂向加速度时频分布Fig.12 Case 1 time-frequency distribution of vertical acceleration of the guide rail
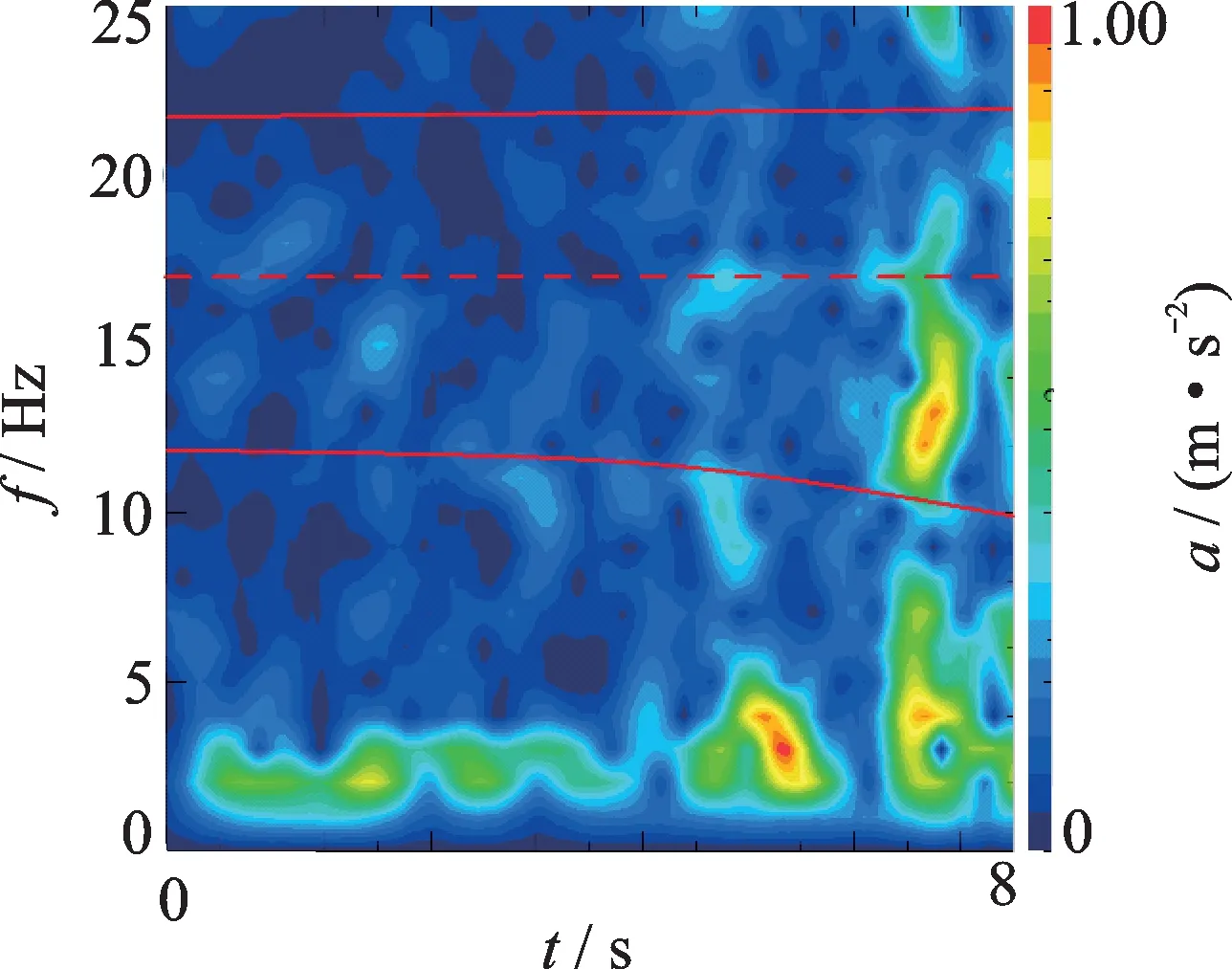
图13 工况2 导轨垂向加速度时频分布Fig.13 Case 2 time-frequency distribution of vertical acceleration of the guide rail
6 结论
1)本研究针对传统时频分析方法无法同时提高车辆非平稳随机时域与频域分辨率的问题,利用白噪声的特性,推导出路面从平稳虚拟激励过渡到非平稳虚拟激励的非均匀调制函数,该函数是非平稳虚拟激励法的关键。
2)利用协方差等效法,解决非匀速行驶时车辆前后轮非平稳虚拟激励间的变时差问题。利用精细积分法求解得到车辆垂向加速度振动响应,计算简便精确。
3)利用非平稳虚拟激励法得到非平稳振动响应演变功率谱三维图,与传统时频分析方法结果进行比较,证实两者结果一致,证明了本研究推导的非均匀调制函数在非平稳随机过程计算与分析中的有效性。结果的分辨率很高,可以有效避免传统时频分析方法无法分析时域-频域的细节问题。
4)分析车辆匀速行驶和非匀速行驶两种工况下的共振区动态特性,发现当车辆匀速行驶时,不论车速大小如何发生改变,共振区范围始终不会发生改变;但当车辆非匀速行驶时,车速的增加会导致共振区的扩大,主要表现为共振区频率下限向更低频扩张,并且车辆垂向振动共振区的扩张速度与车辆行驶加速度成正比。试验验证了该仿真结果的正确性,这对于指导主动/半主动悬架的有限频带控制具有指导意义。
猜你喜欢
山东商业职业技术学院学报(2022年5期)2022-11-03
计算技术与自动化(2022年1期)2022-04-15
强度与环境(2021年3期)2021-07-27
现代电子技术(2020年13期)2020-08-07
宇航计测技术(2018年3期)2018-09-08
当代陕西(2018年12期)2018-08-04
消费导刊(2017年23期)2018-01-15
人大建设(2017年6期)2017-09-26
北京汽车(2016年6期)2016-10-13
汽车实用技术(2015年8期)2015-12-26