一种新型十字结构机械臂设计
2022-05-30 07:44郑丽娜张相哲班顶
电子测试 2022年8期
郑丽娜,张相哲,班顶
(六盘水师范学院物理与电气工程学院,贵州六盘水,553000)
0 引言
“中国制造2025”推动了工业机器人、机械臂等智能化设备的应用,使无人工厂成为可能,高校对该领域人才的培养更是重中之重。但目前在高校领域用于学生使用的机械臂大多控制精度低且运动学逆解复杂。而精度高的机械臂往往结构复杂,难以小型化。本文设计的十字结构机械臂控制精度高、结构新颖实用、控制算法简单并且小型化。该机械臂包括旋转基座、动力装置、横臂、纵臂、机器视觉装置、执行末端、直线轴承、四向滑台机构及固定机构。在本装置中,操作人员可通过程序控制或遥控方式灵活调节机械臂动作,控制执行末端精确到达指定位置进行相应操作。
1 整体结构及工作原理
1.1 整体结构
本机械臂由旋转基座、动力装置、横臂、纵臂、机器视觉装置、执行末端、直线轴承、四向滑台机构及固定机构组成,机械臂整体结构如图1所示。在该装置中,旋转基座包括内环与外环;动力装置包括1-3号电机、闭环同步带、开环同步带及同步轮;横臂、纵臂均采用直径为6mm的硬质光轴;固定机构包括顶板、尾板和前板。其中,旋转基座内环上方安装机械臂纵臂,可带动机械臂作旋转运动,当不考虑旋转基座时,机械臂整体为Core XY变体结构;1号电机安装在旋转基座的外环,通过闭环同步带与旋转基座内环连接,用于驱动旋转基座内环旋转;2号电机、3号电机通过开环同步带与横臂、纵臂连接,用于驱动机械臂上下、前后方向的运动;四向滑台机构内部安装有滚珠直线轴承,可减小滑动时的摩擦力,四向滑台机构安装在纵臂上,可在纵臂上自由升降;同时横臂也安装在四向滑台机构内,可在其内作直线运动;执行末端安装在固定机构的前板下方;机器视觉装置安装在执行末端与固定机构前板之间。
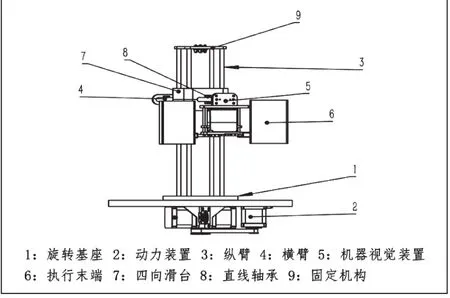
图1 机械臂整体结构
根据所设计的机械臂实际结构,其对应运动模型如图2所示。由一个转动副和两个移动副组成。转动副对应机械臂的旋转基座的转动,移动副对应机械臂横臂、纵臂的作直线运动和自由升降动作。

图2 机械臂运动模型
1.2 工作原理
在本设计中操作人员可通过程序控制或遥控方式灵活调节机械臂动作,进而控制执行末端精确到达指定位置进行相应操作。当采用程序控制方式时,操作人员按下启动按钮,主控制器立即将程序命令计算转为控制命令(即步进电机的脉冲信号及正反转信号)发送给步进电机控制器,步进电机控制器根据控制命令驱动步进电机动作,并通过同步带传动从而带动整个机械臂协调有序的执行相应动作,进而控制执行末端完成指定任务如抓取、放置等。若采用遥控方式,操作人员按下启动按钮并根据实际需要对机械臂发送指令,主控制器接收指令经计算后转为控制命令发送给步进电机控制器进而驱动步进电机运动,利用同步带传动带动整个机械臂根据实际应用要求控制执行末端完成相应动作。本设计的机械臂为Core XY变体结构,其控制原理在不考虑旋转基座时与Core XY结构类似。Core XY是一种3D打印机的结构类型。Core XY的工作原理是通过两个电机同时控制X轴、Y轴的移动,当两个电机转动同向工作时,往X轴方向移动;反之当两个电机转动反向动作时则往Y轴方向移动。在本设计中,两个电机固定于机械臂底部,以减轻运动部分的重量,同时下移了整体装置的重心,使得机械臂可以更加快速、稳定的动作。并且当两个电机同时作用时,其力量比单个电机控制更加稳定。
1.3 机械结构选型
本设计的机械臂是一款小型化、轻量型的机械臂,需考虑其机械机构的刚性、运动稳定性以及整体机械结构重量等因素,为保证其具有的特点,该机械臂纵臂采用4根长度为250mm、直径为6mm的硬质光轴;机械臂横臂采用2根长度为280mm、直径为6mm的硬质光轴;此外,旋转基座内环与四向滑台均采用改性PC材料3D打印制作而成;其他受力结构均采用碳纤维材料3D打印加工制作。
2 主控制器设计
主控制器由电源模块、稳压模块、步进电机驱动器及主控芯片组成,该控制器安装在机械臂底部旋转基座上。主控制器结构图如图3所示。其中,电源模块采用12V、2400mAh锂电池为机械臂提供供电电压;稳压模块采用MP2225开关型变换器,其转换效率高达 97%,在宽输入范围内可实现5A的输出电流,具有极好的负载和线性调节性能;主控芯片采用带DSP和DP-FPU的高性能ARM Cortex-M7 MCU,该MCU具有2 MB Flash、1 MB RAM、480 MHz CPU以及外部存储器接口和大量外设,可满足设计需求。在电路设计中,电源模块两极分别连接稳压模块的IN+、IN-引脚,经稳压模块降压后,输出引脚连接主控芯片的VCC、GND引脚,同时主控芯片引脚连接步进电机控制器进而控制整个机械臂动作。在机械臂整体结构中采用OpenMV 4 plus 500万摄像头模块作为机器视觉装置,该模块具有4根不同颜色的线,红线、黑线分别接电源模块正极、负极,其余两根为信号线与主控制器连接实现对抓取放置物体的颜色识别、物体识别等操作,并将其结果返回主控制器。

图3 主控制器结构图
3 软件设计
本设计采用Keil V5软件进行机械臂控制程序的设计,该软件具有程序结构灵活、适用性广等特点,所设计机械臂的控制流程如图4所示,具体步骤如下:
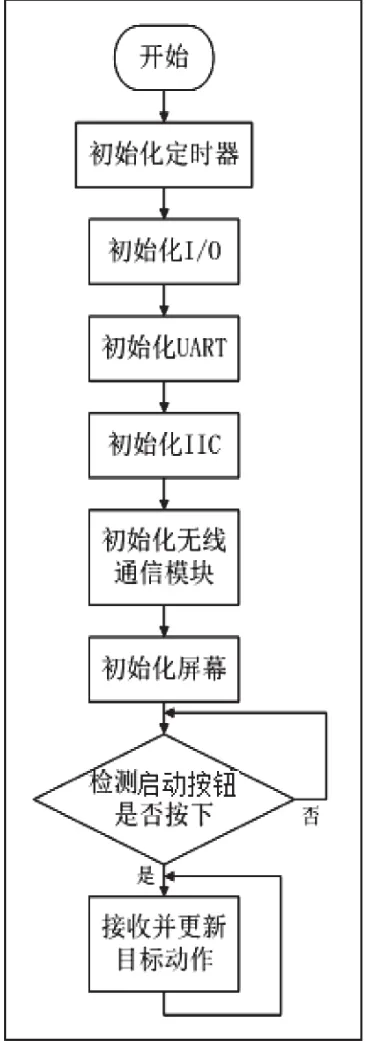
图4 机械臂控制流程图
(1)给装置上电,完成装置的初始化,包括定时器、I/O、UART、IIC、无线通信模块初始化。
(2)检测启动按钮是否按下,若按下,则主控制器工作,若无,则重复(2)动作,直至启动按钮被按下结束。
(3)主控制器接收并更新目标动作,若接收到新的动作任务,则发出指令控制步进电机驱动器驱动步进电机运动至指定动作使机械臂完成相应工作,若主控制器没有接收到新的动作,则重复(3)动作。
(4)重复以上,执行动作任务。
4 实验结果分析
为验证所设计机械臂的可靠性、稳定性等性能,则对以下5种运动状态下的精度进行实验,并记录运动行程、重复定位次数、单次运动时间(s)、重复定位精度(mm),实验结果见表1。

表1 机械臂运动状态分析
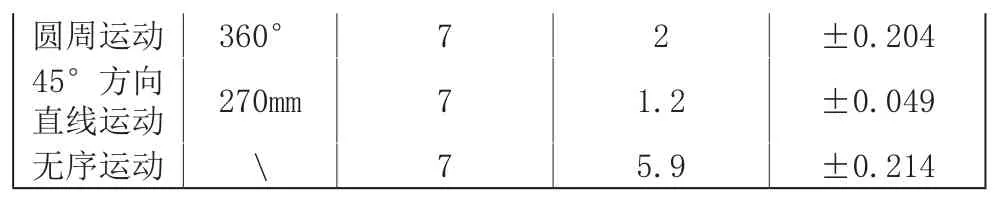
圆周运动 360° 7 2 ±0.204 45°方向直线运动 270mm 7 1.2 ±0.049无序运动 7 5.9 ±0.214
从表1数据可知,所设计的十字结构机械臂在水平运动、垂直运动以及45°方向直线运动的运动状态下,单次运动时间为1.2s,且定位精度较高,同时该机械臂还可调整旋转角度为360°,也可以根据实际情况更换光轴增加行程。
5 结论
本文设计的十字结构机械臂,具有精度高、易控制、小型化、轻量型的特点,该装置为高精度小型机械臂带来了更好的选择,结构新颖,具有广泛的市场前景。且可根据实际情况更换光轴增加行程以及增大负责旋转的从动同步轮来进一步提高旋转的精度。
猜你喜欢
猪业科学(2022年8期)2022-09-09
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
文萃报·周五版(2022年11期)2022-03-23
华声文萃(2021年6期)2021-08-25
意林(2021年10期)2021-05-28
文萃报·周五版(2021年15期)2021-05-08
网络空间安全(2019年8期)2019-03-18