基于序贯三支决策的目标作战意图识别方法
2022-06-07 14:13越凯强范盘龙田琳宇
陕西师范大学学报(自然科学版) 2022年3期
李 波,越凯强,范盘龙,田琳宇
(1 西北工业大学 电子信息学院,陕西 西安 710129;2 中国电子科技集团公司 数据链技术重点实验室,陕西 西安 710068;3 中国航空工业集团公司 西安航空计算技术研究所,陕西 西安 710068)
空战中,准确及时地了解敌方作战情报可以为我方作战指挥决策提供有利的支撑[1-4],在交战中如果能预先知道敌方目标的作战意图[5],就能推测敌方作战计划,做到“知己知彼”,进而“百战不殆”。
明确了目标的作战意图,即掌握了目标作战动向和敌方作战趋势,我方决策者就可以根据这些意图信息采取针对性的决策方案。在识别目标意图过程中[6-7],需要收集大量的领域专家先验知识[8],并且用这些先验知识构建基于模板匹配的意图识别知识库[9],以规则的形式表示目标行为状态与意图的关系,一旦目标状态满足某种规则,则触发事件检测[10],最后依据意图推理机推理得出目标作战意图。当前研究利用专家知识和贝叶斯概念[11]构建基于专家知识的贝叶斯意图识别网络[12-13],并且将贝叶斯意图识别网络作为意图推理机使用。该方法可以较好地表达目标状态特征与具体意图之间的关系,但是需要大量专家经验,对先验概率[14]进行量化也较困难。意图识别是一个系统性问题,如果不考虑时间的先后顺序以及信息获取的递增性,就不能有效说明和利用战场态势信息中的时序特征和前后逻辑关系。因此,意图识别既要考虑时效问题,同时也要综合分析短期和长期战场态势[15]的特征。目前大部分文献对目标意图识别中的时序性问题研究得不够深入,意图识别需要在该方面进行突破。
三支决策[16-18]是近年来提出的一种处理不确定信息的方法,该方法根据一定的评价函数和阈值对整个区域进行分类,将一个统一的集合划分成3个互不相交的区域。与传统的二支决策相比,三支决策在接受和拒绝2种决策之外给出了第3种选择:延迟决策,从而避免了直接接受或者拒绝带来的风险。本文将序贯思想[19]引入三支决策中,提出了一种基于多类别序贯三支决策的意图识别模型,按照时间顺序将意图识别过程分为多个阶段,对于因目标信息不充分而无法确定目标意图的情况,使用延迟决策,待下一阶段获得更多目标信息后,继续对目标意图重新进行识别,以此来解决意图识别中存在的时序性问题,降低意图误识别的损失。
1 多类别三支决策
1.1 多类别三支决策数学模型
多类别三支决策信息系统定义为
S=(U,A,V,f)。
(1)
式中:U为对象的集合;A=(C∪D)是信息系统上的属性集合,C为条件属性,D为决策属性;V表示属性的取值范围;f表示从对象到属性取值的信息函数,即f:U×A→V,它指定了U中每个对象的属性值。
D=(D1,D2,…,Dn)表示根据决策属性形成的n个互不相交的决策状态集合,对于每个决策类Dj(j=1,2,…,n),分别形成它的一个二分类{Dj,(Dj)C},(Dj)C=∪jt≠tDjt。给定行动集合A={aP,aB,aN},其中aPj、aBj、aNj分别表示将对象x分类到P(Dj)、B(Dj)、N(Dj)的3种行为,Dj的正域、负域和边界域的判别为
P(αj,βj)(Dj)={x∈U|r(Dj|x)≥αj},
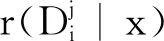
B(αj,βj)(Dj)={x∈U|βj N(αj,βj)(Dj)={x∈U|r(Dj|x)≤βj}。 (2) 式中:x表示论域U中的对象;r(Dj|x)表示对象x属于Dj的条件概率;(αj,βj)作为决策类Dj的三支决策阈值,计算公式为 αj=(λPN(Dj)-λBN(Dj))/((λPN(Dj)-λBN(Dj))+(λBP(Dj)-λPP(Dj))), βj=(λBN(Dj)-λNN(Dj))/((λBN(Dj)-λNN(Dj))+(λNP(Dj)-λBP(Dj)))。 (3) λPP(Dj)、λNP(Dj)、λBP(Dj)表示x∈Dj时,将对象x放入Dj的正域、负域和边界域时的损失函数值;λPN(Dj)、λNN(Dj)、λBN(Dj)表示x∈(Dj)C时,将对象x分别放入Dj的正域、负域和边界域时的损失函数值。 给定决策信息表 S=(U,A,V,f)。 (4) 论域U={x}表示战场中敌方目标;A=(C∪D)是信息系统上的属性集合,C为条件属性集,表示战场中获得的目标信息,D为决策属性集,表示目标意图的集合。本文中设置的目标可能意图种类有5种,即D={D1,D2,…,D5},分别表示攻击、侦察、突防、电子干扰和规避,这5种意图涵盖了空战目标的大部分可能意图。C表示目标信息,即包含了战场中每一时刻的目标特征向量,用Y=(yi1,yi2,…,yit)T表示第i时刻目标的特征向量,(y1,y2,…,yt)分别表示数值化处理后目标的高度、速度、航向角和敌我距离等t种目标特征属性,其中数值化处理采用的是最大最小归一化处理方法[20]。 本节将结合序贯思想和多类别三支决策构建多阶段意图识别结构,根据Yao提出的多类别三支决策模型[21],依次做出每个分类的三支决策,从而对每个阶段的目标意图识别进行多类别分类。对于因信息不足而被分类到边界域或者负域的对象,将通过更新下一阶段意图识别中的条件属性集C的信息,对信息不足的对象重新进行决策,使得决策过程随着时间的推移而逐渐精细化。 由于目标特征信息的获取存在时序性,所以在目标意图识别中,条件信息属性应按照时间段表示,即设条件属性为 C={C1,C2,…,Ck}。 (5) 应满足C1⊂C2⊂…⊂Ck,表示在k个不同阶段得到的目标信息。D={D1,D2,…,Dn},表示目标意图空间,即每一个目标都存在n个可能意图。因此,一个完整的序贯三支决策应该定义如下。 定义目标意图识别系统为 S=(S1,S2,…,Sk)。 (6) (7) (8) 表1 意图决策损失函数矩阵 由2.1节的识别模型可知,目标存在的n个意图可能集合,会对论域对象即目标x进行n次决策划分,也会依次形成n个意图决策类的正域、边界域和负域。但是,这种决策方法会使得意图决策存在冲突,即同一目标对象会被划分到不同决策类的正域,或同一目标对象被划分到一个决策类的边界域和另一个决策类的负域或正域等多种情况。针对这种情况,下面将给出几种识别过程。 识别情形1给定第i阶段决策结构为 Si=(Ui,Ci,Di)。 (9) 识别情形2给定第i阶段决策结构为 Si=(Ui,Ci,Di)。 (10) Si+1=(Ui+1,Ci+1,Di+1), (11) 则有 Ui+1=Ui={x},Ci+1=Ci+Cnewii+1, (12) 式中:Cnewii+1表示第i阶段到第i+1阶段新获取到的目标的条件信息。对于单目标意图识别,每一阶段决策结构的论域是一样的;对于多目标意图识别,则可将每一个目标单独按照单目标识别来进行。 识别情形3给定第i阶段决策结构为 Si=(Ui,Ci,Di)。 (13) Si+1=(Ui+1,Ci+1,Di+1), (14) 则有 Ui+1=Ui={x},Ci+1=Ci+Cnewii+1, (15) 对于可能出现的其他情形,根据其发生概率与决策阈值的关系,都可以划分到本文给出的3种基本情形之中。具体算法如下。 算法1 多类别序贯三支决策解决目标作战意图识别问题输入:决策信息系统Si=(U,Ci∪D,Vi,fi),i=1,2,…,k;输出:目标作战意图T=Dj;初始化Ui=U,T=∅;for i = 1 to k 设置目标初始可能意图集合D=(D1i,D2i,…,Dni); 获取当前目标特征信息Ci; for j = 1 to n 计算P(αji,βji)(Dji)、B(αji,βji)(Dji)、N(αji,βji)(Dji) if P(αji,βji)(Dji)=∅ Dji+1=Dji-∪Dji//∪Dji∈N(αji,βji)(Dji) else Dji+1=∪Dji//∪Dji∈P(αji,βji)(Dji) Ti=∪Dji end if end for 更新目标信息Cireturn T=Ti 在现实空战中,战场态势变化速度快,目标作战意图可能会随着战场态势的变化而作出相应的调整,倘若我方的战术策略仍按照最先识别出的目标意图进行决策,很可能会使我方飞机陷入困境,从而面临威胁。因此,在多类别序贯三支决策目标意图识别模型的基础上,对意图识别过程稍加改进。图1为改进后的意图识别具体流程图,对已经明确识别出作战意图的目标,在原来信息的基础上,每隔一定的时间Tit,对目标意图重新进行识别。对未明确识别出作战意图的目标,则仍依照原有的方法继续对目标进行意图识别。 图1 改进型意图识别流程图 作战设想:设定目标的空间初始位置为(60,60,7),单位km;初始速度为270 m/s;初始方位角为-90°,朝y轴负方向飞行,俯仰角为0°。我方作战飞机的空间初始位置为(10,10,6),单位km;初始速度为240 m/s;初始方位角为50°,俯仰角为0°。 图2是双方飞机的空战三维轨迹图。在发现目标之后,我机便开始跟踪目标,不断获取目标的信息。目标在发现我机之后,便开始以突防的形式向我方逼近。 图2 空战轨迹图 本文直接给出各意图的三支决策阈值,如表2所示。 表2 三支决策阈值表 图3为序贯多类别三支决策模型下的目标意图识别结果示意图。 图3 实验一目标意图识别结果示意图 如图3a为传统二支决策意图识别结果,可以看出在意图识别过程中没有识别出目标的准确意图。图3b为三支决策意图识别模型的识别结果。识别前期,目标信息获取较少,存在攻击和突防意图的可能。在识别中期,由于目标下降到较低的飞行高度,符合目标进行低空侦察的可能,所以该时间段内侦察意图与攻击和突防意图同样进入了意图结果的备选选项。到了后期,随着敌我距离的不断接近,突防意图也就转变成了攻击意图,这与实际空战较为符合,因为在真实空战中,若敌方飞机不断接近且不做规避机动,则很大概率为攻击意图。 作战想定:设定目标的空间初始位置为(50,50,7),单位km;初始速度为270 m/s;初始方位角为-90°,朝y轴负方向飞行,俯仰角为0°;目标当前正在执行侦察搜索任务。我方作战飞机的空间初始位置为(10,10,6),单位km;初始速度为240 m/s;初始方位角为50°,俯仰角为0°。 图4是双方飞机的空战三维轨迹图。在发现目标之后,我机便开始跟踪目标,不断获取目标的信息。 图4 空战轨迹图 各意图的三支决策阈值同表2。 图5a为传统二支决策意图识别结果,识别结果最终为电子干扰和攻击意图,未能准确识别敌机作战意图。图5b为三支决策意图识别模型的识别结果。识别前期由于目标信息不充足,所以意图识别结果存在多种可能;而到了识别后期,目标信息逐渐增多,目标意图则确定为电子干扰,这与实际空战较为符合,因为在真实空战过程中,敌方飞机不断做S型机动,在我方飞机靠近过程中,敌方未改变机动方式,因此其作战意图为电子干扰的概率较大。 图5 实验二意图识别结果示意图 本文针对三支决策方法具有延迟决策的特点以及意图识别的时序性问题,提出了基于序贯三支决策的意图识别模型,将多类别三支决策应用到目标意图识别中,把意图识别过程按照时序性分成了多个阶段,对于某个阶段未识别出目标意图的情况,意图识别模型将会在下一阶段获得目标新信息的基础上,重新对目标进行意图识别,进而解决意图识别中存在的时序性问题,提高意图识别准确性的同时有效降低意图误识别的代价损失。1.2 三支决策与意图识别的对应关系
2 基于序贯三支决策的目标意图识别
2.1 序贯三支决策意图识别数学模型



2.2 意图识别情形



3 仿真分析
3.1 实验一



3.2 实验二


4 结论
猜你喜欢
法律方法(2022年2期)2022-10-20
福建基础教育研究(2022年4期)2022-05-16
小哥白尼(军事科学)(2022年1期)2022-04-26
法律方法(2021年3期)2021-03-16
民族古籍研究(2018年1期)2018-05-21
军营文化天地(2017年6期)2017-06-28
新校长(2016年8期)2016-01-10
百科探秘·航空航天(2015年10期)2015-11-07
浙江大学学报(工学版)(2015年1期)2015-03-01
中国中医药现代远程教育(2014年16期)2014-03-01