
基于图论的多杆式栽植机构构型综合与方法研究
2022-06-21 08:20郑广辉叶治政俞高红
农业机械学报 2022年5期
孙 良 郑广辉 叶治政 俞高红
(1.浙江理工大学机械与自动控制学院, 杭州 310018; 2.浙江省种植装备技术重点实验室, 杭州 310018)
0 引言
栽植机构是移栽机械的核心工作部件[1]。不同的栽植方式往往需要配置合适的栽植机构,而农作物复杂多样化的农艺要求对低成本、个性化栽植机构的创新设计提出了挑战。因此,开展栽植机构数字化设计与综合研究,对探索发现更多具有优异作业性能的栽植机构构型具有重要意义。
多连杆栽植机构由于具有结构简单、可实现作业轨迹丰富等优势,目前广泛应用于水旱田栽植机械中。现有的多连杆栽植机构存在不同构件数下的多种构型。四杆机构是能满足植苗运动的最简单机构,唐宾等[2]针对曲柄摇杆式分插机构[3]运动惯性大、高速作业受限等缺点进行动力学分析,经过优化改进,提高了插秧的工作效率。何小晶等[4]对双曲柄五杆栽植机构进行了运动学分析,通过人机交互的方式,探究各连杆长度对植苗轨迹的影响,得到一组运动轨迹与姿态良好的栽植机构。金鑫等[5]添加凸轮构件,设计了一种凸轮-六杆式机构,用于导苗管式移栽机,保证了移栽过程中植苗的垂直姿态。日本对半自动蔬菜移栽机进行相应研究,提出了一种七杆式栽植机构。陈建能等[6]对七杆式栽植机构进行参数分析与优化,得到一种多杆栽植机构,有立苗率优、加速度及波动范围小的优势。王斌[7]、郑士永[8]对多杆开沟式栽植机构使用遗传算法等方式进行设计优化,逐步改良了开沟式植苗机构。为调整栽植频率与整体前进速度的关系,尹文庆等[9]提出一种八连杆栽植驱动机构,该机构适合蔬菜苗移栽且栽植情况良好。
综上可知,在栽植苗方面,不同杆件数都有其代表的机构,但从目前多连杆机构的应用情况看,栽植机构构型单一;国内学者更多从现有构型的优化设计着手,围绕尺度层面开展优化设计,但实际研究往往会受到构型约束。因此,进行栽植机构的构型综合研究可探索更多潜在可用的机构构型,对机构的创新设计至关重要。
针对以上问题,本文以多连杆栽植机构为研究对象,基于图论和组合优化理论,开展适用于栽植作业的连杆式栽植机构自动综合方法研究,通过对9构件内的拓扑图进行相似点识别[10-12]、同构判别[13-14]、功能点(机架、输入与输出点)选取,得到机构功能拓扑图;依据栽植机构运动特征,在拓扑图层面上提出筛选规则,得到特定杆件数下的所有可用构型,建成机构功能拓扑图图库。最后,选取西兰花幼苗栽植的农艺要求作为机构设计的约束条件,从某杆件数下机构功能拓扑图中挑选一种构型,进行栽植机构参数调试并获得期望轨迹。
1 拓扑图构型综合
拓扑图是点线组成的对实际物体的抽象图形,可准确表示物体内组成部分的连接关系[15]。在机械设计领域中表示机构连接关系及相关性质的图称为运动链拓扑图。运动链拓扑图上的点,按照一定的规律标注数字。其中,单色拓扑图实心点代表构件,线条代表运动副。图1a所示单铰运动链对应单色拓扑图如图1b所示。
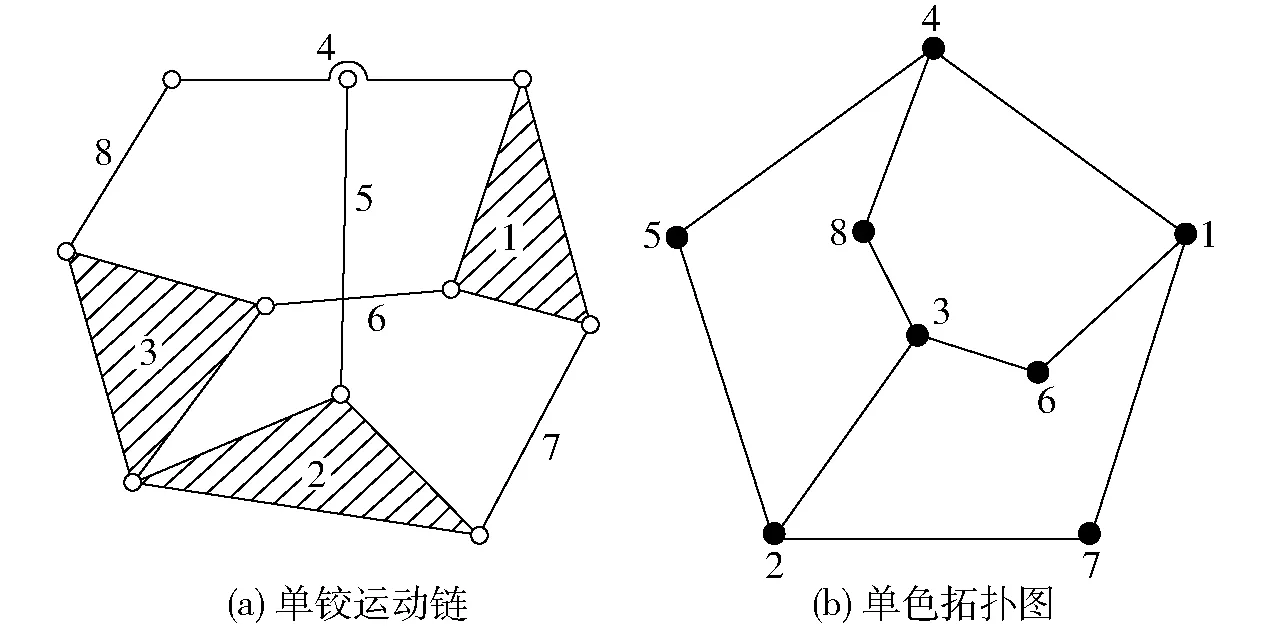
图1 运动链及其对应拓扑图Fig.1 Kinematic chain and its topological graph
1.1 构型综合过程
为获取运动链拓扑图,采用胚图插点法[16-19]综合不可分离单色运动链拓扑图。考虑到多连杆机构在栽植机械中的实际应用要求,主要开展9构件内的连杆机构运动链的综合研究,且设定所有构件均为连杆,所有运动副均为转动副。
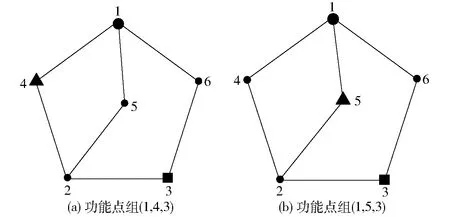
图2 同构的机构功能拓扑图Fig.2 Isomorphic mechanism topological graphs
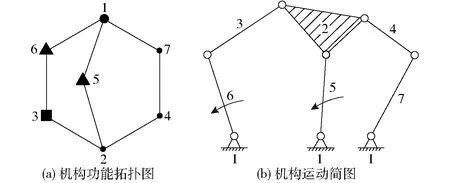
为实现栽植机构的创成,在获取拓扑图后,通过对运动链拓扑图选取功能点得到9杆内所有机构功能拓扑图[20],并使用功能点组表示所选取功能点的位置。图2a所示拓扑图功能点组为(1,4,3)。其中第1位数字表示机架位置点,在拓扑图中用实心圆标注;第2位数字表示输入位置点,在拓扑图中用三角形标注;第3位数字表示输出位置点,在拓扑图中用矩形标注。在功能点选取过程中,由于受拓扑图相似性的影响,存在机构功能拓扑图同构情况。如图2所示,顶点4与顶点5互为相似点,3种功能点位置均相同或相似,因此,图2a与图2b为同构机构功能拓扑图。互为同构的拓扑图,能实现相同的运动效果,需要在拓扑图综合过程中除去。对机构功能拓扑图进行相似点识别与同构判别是避免同构出现的可行方法之一。
1.2 相似性判别及应用
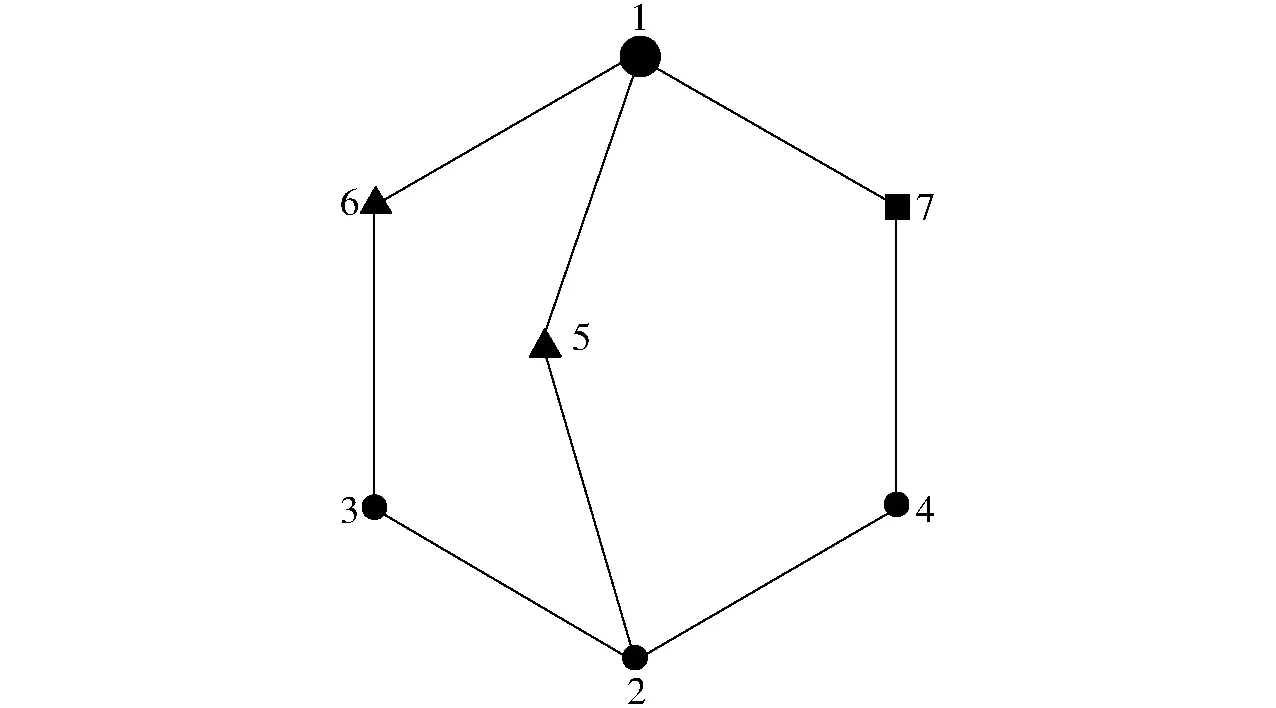
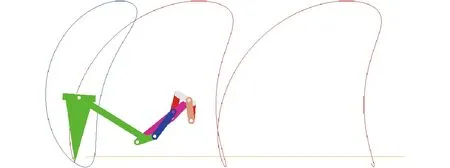
为识别拓扑图中的相似点,判别拓扑图间的同构,提出一种加权四次幂及加权最小距离矩阵的方法。为更好地展示相似点识别的过程,以图3所示七杆式栽植机构[21]及对应拓扑图为例,阐述相似点识别与同构判断的过程。
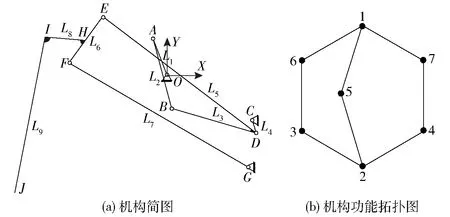
图3 七杆式栽植机构Fig.3 Transplanting mechanism with seven links
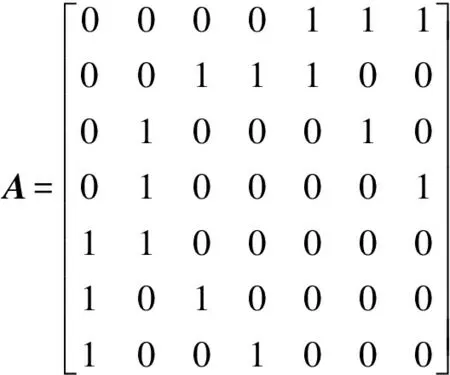
(1)提取拓扑图并获取邻接矩阵
如果顶点i与顶点j相连,则邻接矩阵A中,i行j列元素aij与i列j行元素aji为1,即满足
(1)
则图3中机构的邻接矩阵为
(2)计算加权矩阵
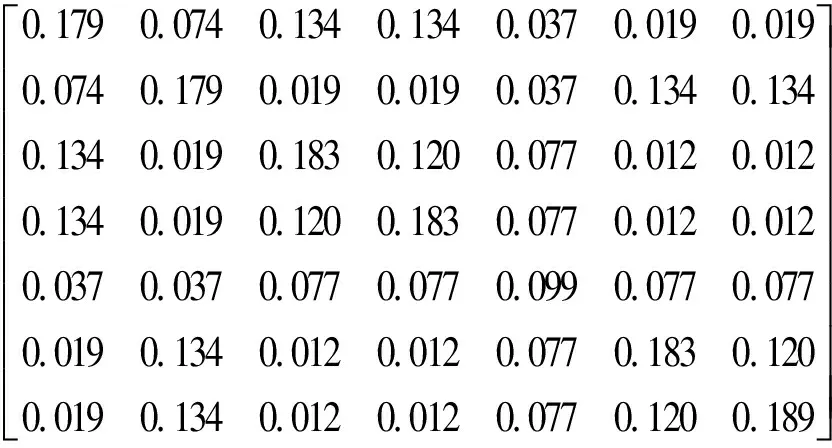
在拓扑图中,为表征运动副对应线条的特征,可在线条边上赋予数值,即赋权[22],也称加权。根据邻接矩阵A,可将每个顶点度数(即与顶点关联边的数目)的倒数作为加权数,记为本行(列)的元素,元素为0的位置则保持不变,将元素写入矩阵对应位置中,得到加权矩阵。该矩阵组成元素满足
(2)
其中d是i、j两顶点中最大的点度数,q表示对元素加权。由此得到的加权邻接矩阵为
(3)获取加权四次幂矩阵[23]
计算加权矩阵的四次幂得到
(4)计算加权最小距离矩阵
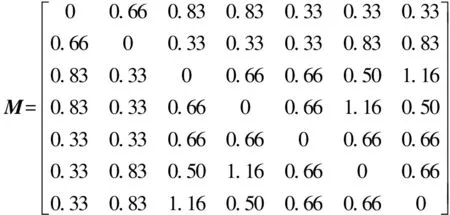
寻找顶点i到达顶点j所经过的最短路径,并按线条中的赋权值求和得到最小距离元素,记入矩阵中对应位置,得到加权最小距离矩阵
(5)相似点的判断规则
提取上述特征矩阵中每行编码组成一组行向量,分别进行降序排列,得到对顶点的两种特征码。特征码表征点在图中的固定位置、连接关系。如果同一拓扑图中两点代表的四次幂特征码与最小距离特征码都相同,则两个点互为相似点,反之,则不是相似点。
例如,为识别顶点1与2和顶点1与3的相似性,分别取加权四次幂矩阵与加权最小距离矩阵第1行、第2行与第3行;均降序排列后,得到顶点1、2、3的两种特征码,如表1所示。

表1 3个顶点的特征码Tab.1 Feature codes of three vertices
对比发现,顶点1与2的特征码相同,顶点1与3特征码不同,因此,顶点1与2相似,顶点1与3不相似。同样,对全部特征码依次对比之后,整理归纳出拓扑图中所有点的相似信息并组成相似点集。如图3中拓扑图相似点集为:{[1,2];[3,4,6,7];[5]}。
除顶点相似外,在构型综合过程中,存在大量拓扑图同构问题。如图4,3个拓扑图标号或形状不同,但图4a中每个顶点都可在图4b、4c中找出与之对应的点,3个拓扑图互为同构。同构是图与图之间的性质相同,而相似点是图中点与点的性质相同,两者有一定的联系,因此,依据相似点的识别方式可以判断拓扑图之间的同构。同构判别的过程是将特征矩阵每行中的元素降序排列之后,再进行行间降序排列[24]。将变形后拓扑图的特征码矩阵进行对比,矩阵相同即为同构,反之为异构。
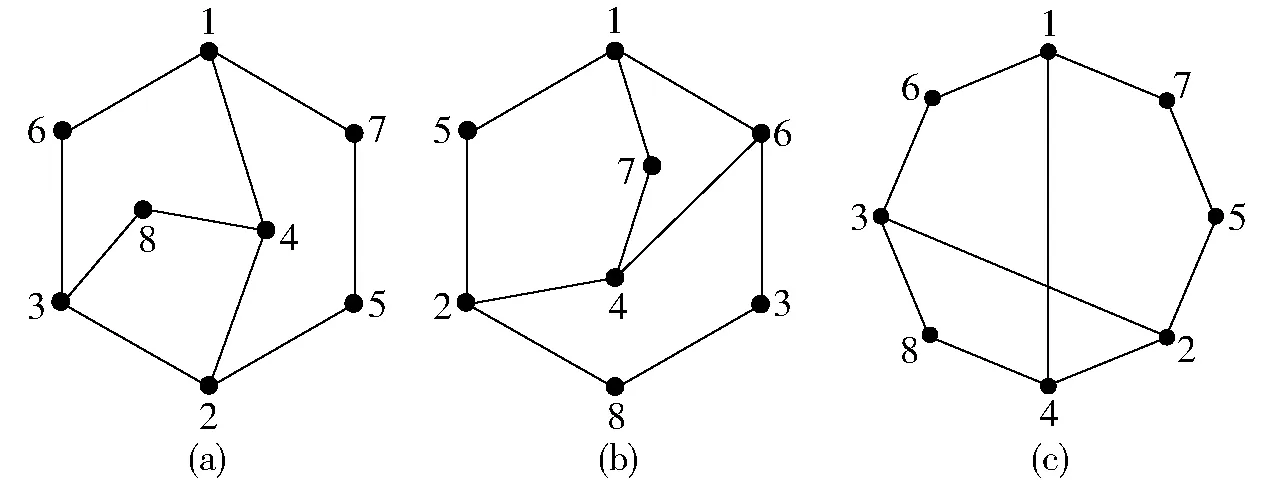
图4 同构的拓扑图Fig.4 Isomorphic topological graphs
2 拓扑图构型筛选
拓扑图中功能点的合理选取是机构创成的关键,为避免因功能点选取而出现基本环中过约束等问题,建立机构筛选规则,以删除此类不合理构型。
2.1 筛选规则
通过构型分析总结,得到拓扑图层面上的筛选规则:
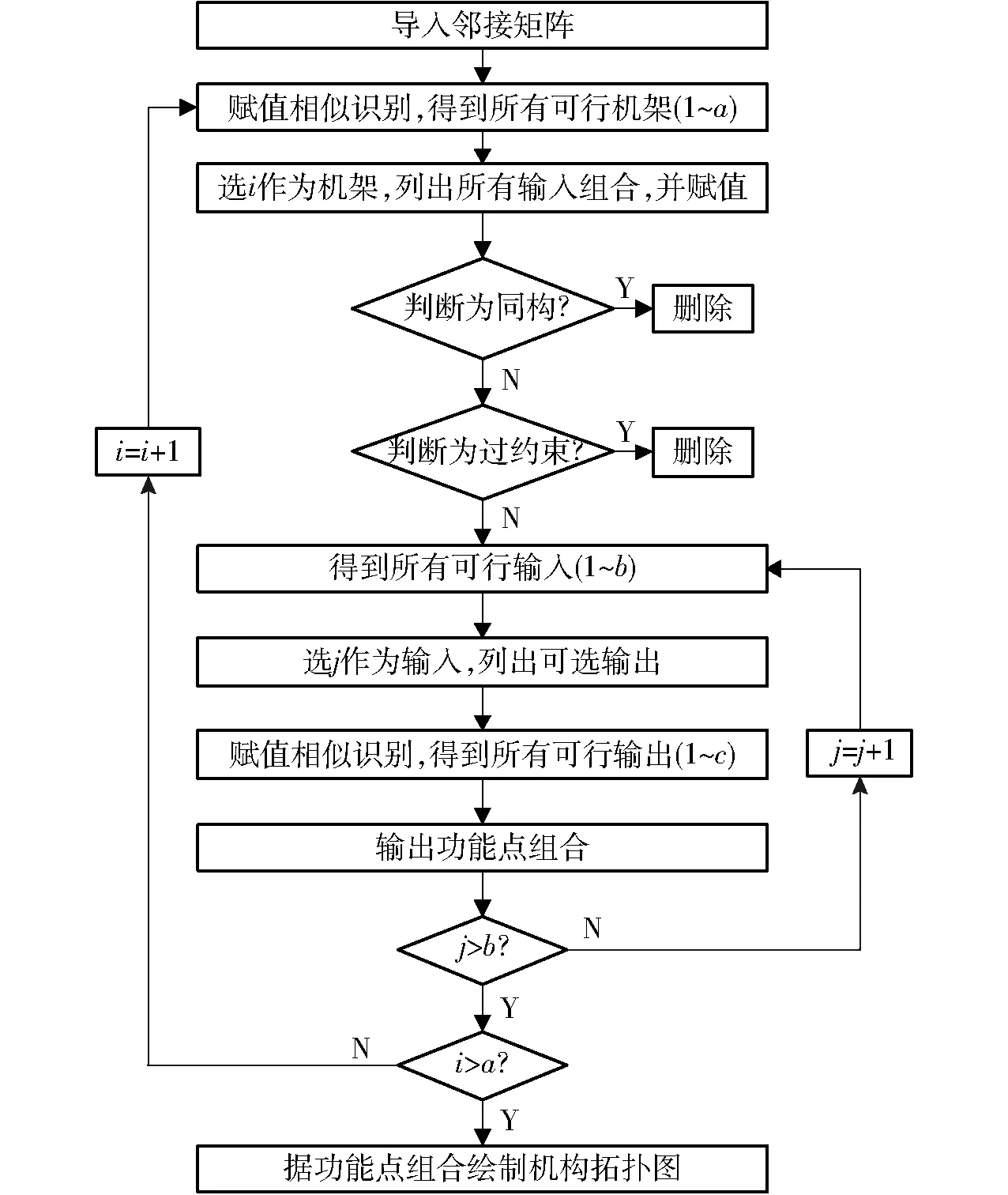
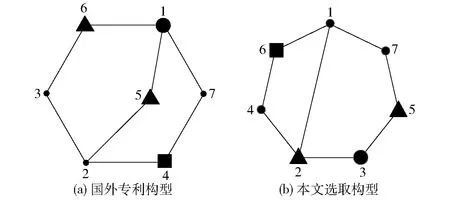
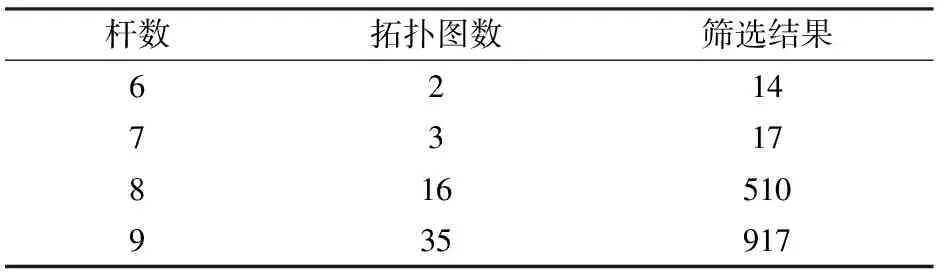
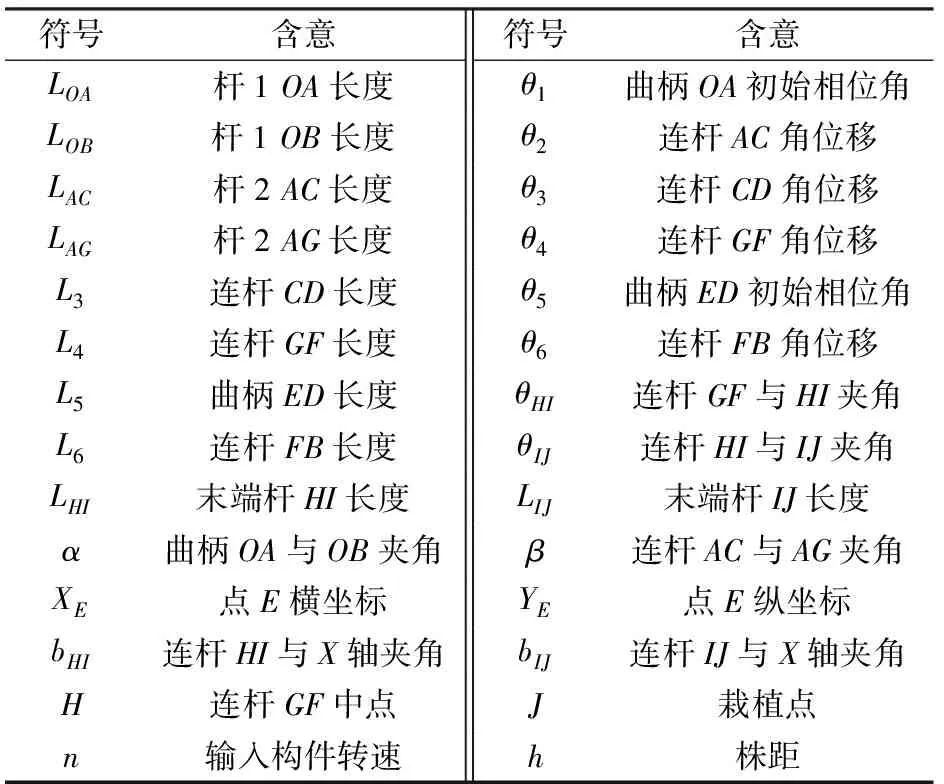
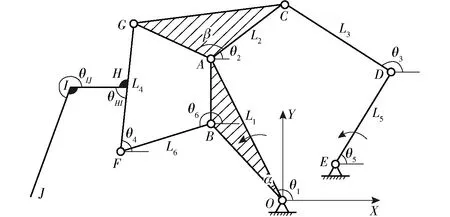
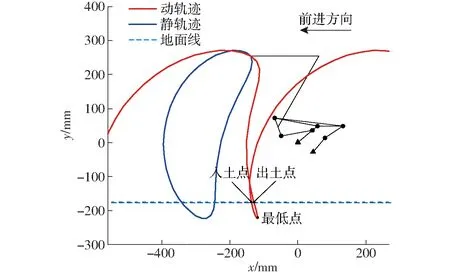
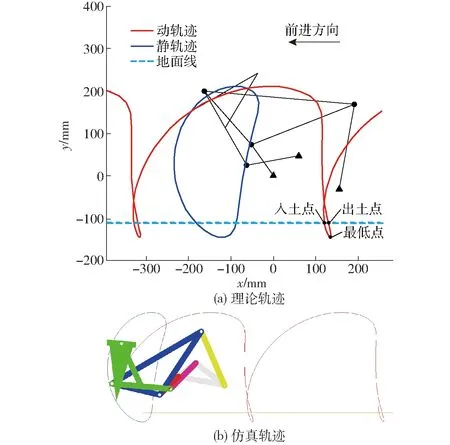
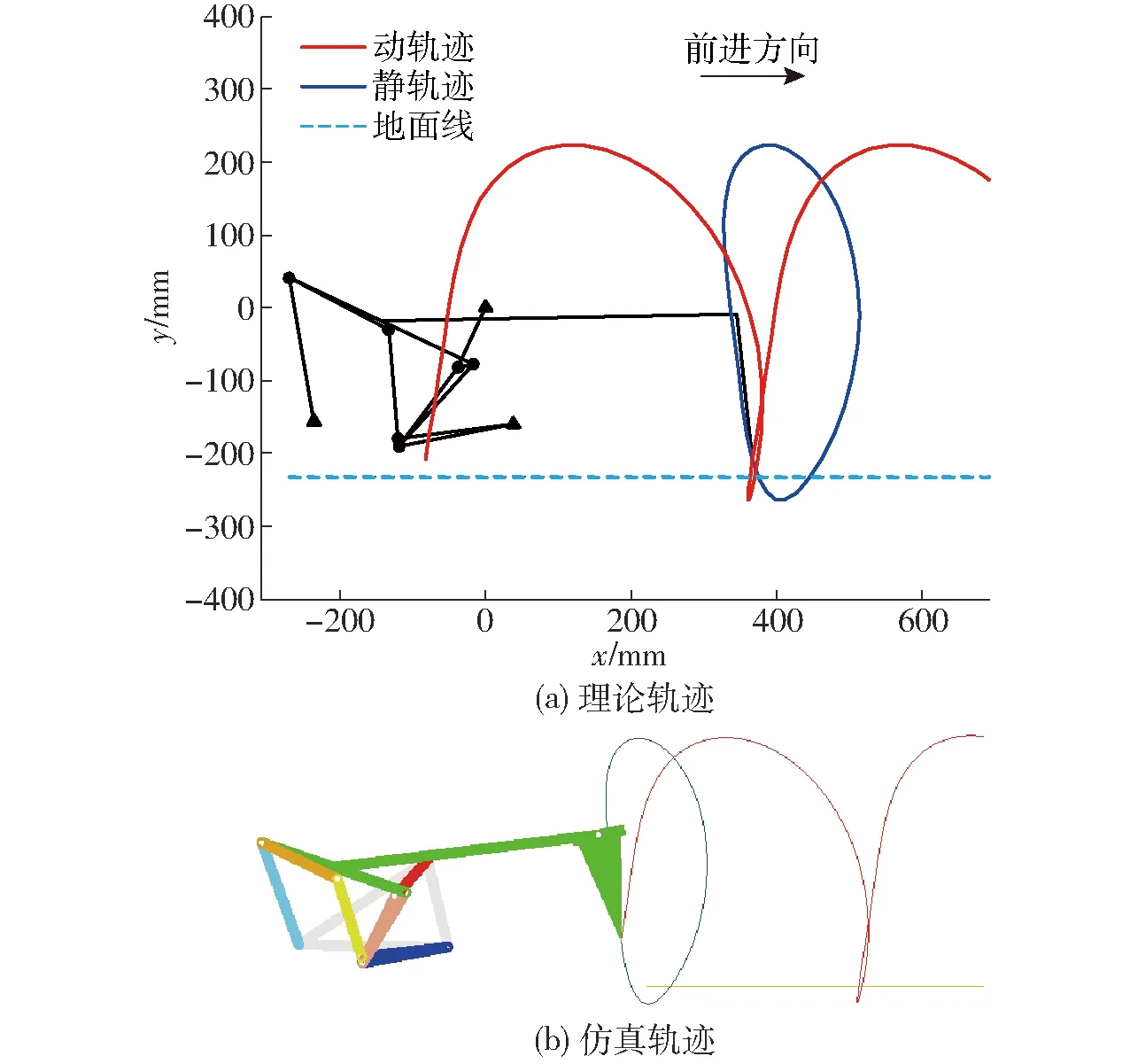
(1)每个基本环中的自由度F必须小于输入构件数r,即存在某基本环中F 图5 过约束的机构功能拓扑图Fig.5 Overconstrained mechanism topological graph 图6 机构功能拓扑图及对应机构运动简图Fig.6 Mechanism topological graph and corresponding kinematic sketch of mechanism (2)当基本环中自由度F等于输入杆件数r时,则不得同时包含机架位置点、输入位置点与输出位置点3种功能点;否则其他环中构件不能对输出杆运动产生影响,此类构件重复多余,机构不合理。如图6a所示,当5、6为输入位置点时,在环1-6-3-2-5-1中自由度等于输入构件数,环内形成独立运动。若3作为输出杆时,环内包含3种功能点,使得杆4与杆7对输出杆的运动不产生影响,此类构型应当去除。 (3)为保证输出杆上轨迹不为单一严格的圆形,拓扑图中机架位置点与输出位置点的距离必须大于1;机架位置点与输入位置点距离必须等于1。如图7所示,机架位置点为1,输出位置点为7时,无论最终植苗点在输出杆上的位置如何改变,静轨迹只能形成机架为圆心的圆或圆弧。 图7 未满足功能点位置要求的机构功能拓扑图Fig.7 Mechanism topological graphs that cannot meet functional point location requirements 将筛选规则应用于机构功能拓扑图的创成中,并依据提出的相似点识别方式,将拓扑图顶点的相似关系应用到机构功能拓扑图绘图过程中。具体需要进行3次相似性的判断,当邻接矩阵导入计算机之后,首先判断相似点,选择相似点组中的第一个元素(顶点)作为机架位置点,并将邻接矩阵对应位置元素标记为2。由于筛选规则中机架与输入杆之间位置关系的限制,要划定当前与机架位置点距离为1的点,作为可选输入点。 由于二自由度机构创成过程中相似点特性变异的影响,会存在如图8所示九杆二自由度拓扑图特例。通过相似点识别得此图相似点集为{[1];[2,3];[4,5,6,7];[8,9]},在不考虑环内过约束的情况下,若选取点1作为机架点,按筛选规则,只能在[4,5,6,7]中选取2个顶点作为一种输入组合,如选顶点4、7为输入点。但实际上,顶点1作为机架位置点时,存在4、7与4、6两组不相似的输入组合。因此,对于多自由度构型,只进行相似点识别会出现输入点组合漏选情况。 图8 相似点特例Fig.8 Special case of similar vertices 为避免上述问题的出现,在综合过程中,选取输入位置点时,采取先选点、后同构判别的策略。即先对所有输入组合对应构型进行标记,之后对所有构型进行同构判别,筛选掉同构构型,得到可行输入组合。经程序实践验证,此方法可有效避免以上错误情况的出现。 同理,对已标记机架与输入位置点的构型识别相似点并选取输出点位置。对应整理3种功能点位置,组成功能点组。其中,多自由度构型中,中间位置数字表示多输入位置点序号。如图7所示七杆二自由度构型中,功能点组合为(1,5,6,7),其中点1为机架位置点,点5、6为双输入位置点,点7为输出位置点。机构功能拓扑图筛选流程图如图9所示。 图9 机构功能拓扑图筛选流程图Fig.9 Flow chart of screening mechanism topological graph 经过上述筛选过程,得到机构功能拓扑图图库。为验证筛选构型的正确性,以七杆二自由度机构为例,进行栽植苗机构的创新设计。列举所有七杆二自由度构型,共得出14组筛选结果。在该类新机构的分析中选取一种与日本井关半自动蔬菜移栽机构(图10a)不同的构型,即图10b所示机构功能拓扑图。9杆内机构功能拓扑图筛选结果如表2所示。 使用选取的七杆二自由度构型,对其中构件赋予长度,得到末端输出位置的轨迹,调整杆长等条件达到植苗要求。理论上,得到的所有构型均可调整得到可行轨迹。但由于拓扑图不展示杆件长度等信息,在转换为实际机构过程中,机构可能会存在回路缺陷。因此为验证机构功能拓扑图的可用性,本文在6、7、8杆构型库中各选取一种筛选结果,进行实例分析。 图10 两种七杆二自由度构型筛选结果Fig.10 Two seven-link two-DOF screen results 表2 9杆内机构功能拓扑图筛选结果Tab.2 Screen results of mechanism topological graph in 9-link 以西兰花幼苗作为栽植对象,进行栽植苗机构设计。为满足有效零速投苗[25]与作物大株距植苗运动轨迹参数需求[26-28],现规定基本的园艺要求:株距设定为450 mm;植苗深度不小于30 mm;夹嘴植苗位置进入地面和离开地面与前进方向地面夹角至少保证在70°~110°之间;夹嘴植苗最低点与前进方向地面夹角在80°~100°之间。 以七杆二自由度机构为例,阐述构型转换为机构的方法与过程。为方便运动学分析,将机构简图中相关参数说明列于表3中。 表3 机构简图相关参数说明Tab.3 Parameters description of mechanism diagram 图11为图10b所对应的七杆二自由度机构简图。建立如图所示平面参考系,设构件1和5为机构输入构件,且具有相同速度(大小和方向)。 图11 机构运动简图Fig.11 Kinematic sketch of mechanism 依据机构运动简图,初步建立基本环矢量方程 LOA+LAC=LOE+LED+LDC (3) LOA+LAG=LOB+LBF+LFG (4) 将矢量方程转化为解析式形式 (5) (6) 列出栽植点J静轨迹方程为 (7) 基于上述运动学模型,编写辅助设计程序[29-31],优化获得新型七杆二自由度栽植机构参数如下:LOA=75 mm,θ1=40°,L5=54 mm,θ5=50°,LAC=75 mm,LOB=56 mm,L6=93.5 mm,L4=56 mm,LAG=128.1 mm,L3=63.1 mm,LIJ=200 mm,θIJ=300°,LHI=240 mm,θHI=230°,α=0°,β=169.1°,XE=44.9 mm,YE=-27.7 mm,n=1 r/s,h=450 mm。 上述参数对应机构静、动轨迹如图12所示。 图12 七杆栽植机构理论轨迹Fig.12 Seven-link theoretical result 该机构株距h=450 mm;前进方向地面与夹嘴植苗最低点夹角α1=88°;前进方向与夹嘴植苗入土点夹角α2=83.1°;与出土点夹角α3=85.3°;植苗最低点与地面距离,即植苗深度l=32 mm,基本满足西兰花植苗所需园艺要求。图13所示为机构仿真轨迹,其与理论轨迹一致,进一步验证了机构设计的正确性。 图13 七杆栽植机构仿真轨迹Fig.13 Simulation result of seven-link planting mechanism 同样,对六杆一自由度机构及八杆一自由度进行综合,并各选一种构型进行栽植机构运动学建模与仿真分析,结果如图14、15所示。其中,株距均为450 mm;距离植苗最低点均为32 mm;其他运动参数均满足西兰花幼苗植苗的园艺要求。 图14 六杆机构理论与仿真轨迹Fig.14 Six-link theoretical result and simulation result (1)为使栽植机构设计满足复杂多样化农艺要求,通过基于相似点识别及特征码信息的同构判别与功能点选取的多连杆机构创成方式,综合并构建6至9杆的多连杆机构构型库。 (2)结合机构运动要求,建立了拓扑图层面机构功能拓扑图的筛选规则,并在构型库中筛选出适合于栽植机构设计的六杆一自由度机构14个,七杆二自由度机构17个,八杆一自由度机构510个,九杆二自由度机构917个。 图15 八杆栽植机构理论与仿真轨迹Fig.15 Eight-link theoretical result and simulation result (3)依据西兰花幼苗栽植农艺要求,在机构功能拓扑图图库中选择3种不同于现存机构的构型。通过运动学建模及参数优选,得到符合期望要求的运动轨迹,验证了栽植机构构型综合方法的正确性。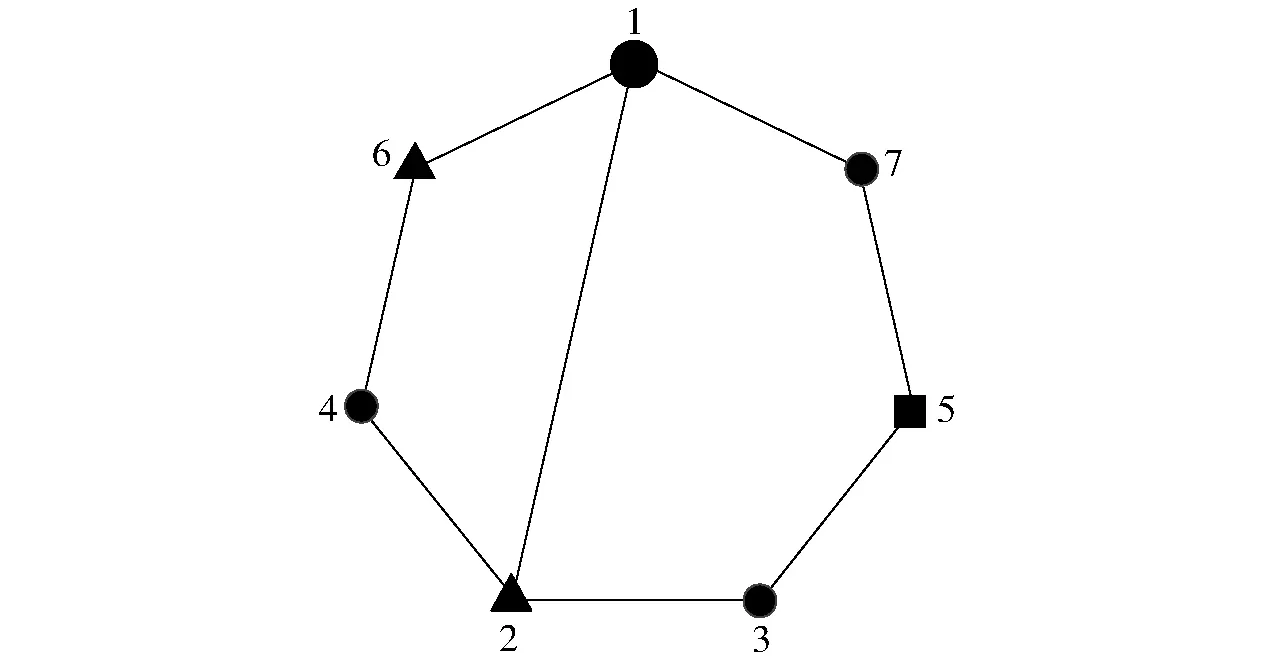
2.2 机构功能拓扑图筛选

2.3 机构创新构型选取
3 栽植机构应用实例
3.1 机构运动学分析与模型建立
3.2 新型机构参数与仿真结果
4 结论
猜你喜欢
农业装备与车辆工程(2022年7期)2022-10-31
军民两用技术与产品(2022年1期)2022-06-01
语数外学习·高中版上旬(2021年7期)2021-11-11
汽车工程学报(2021年3期)2021-06-16
中学生数理化(高中版.高二数学)(2021年2期)2021-03-19
中学生数理化(高中版.高二数学)(2021年2期)2021-03-19
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
中学课程辅导·高考版(2020年9期)2020-10-20
风能(2020年11期)2020-04-19
中国计算机报(2018年13期)2018-05-23
