
基于全矢增强深度森林的旋转设备智能故障诊断方法
2022-06-22 02:53姜万录张培尧赵亚鹏张淑清
中国机械工程 2022年11期
姜万录 李 满 张培尧 赵亚鹏 张淑清
1.燕山大学河北省重型机械流体动力传输与控制重点实验室,秦皇岛,0660042.燕山大学先进锻压成形技术与科学教育部重点实验室,秦皇岛,066004 3.燕山大学电气工程学院,秦皇岛,066004
0 引言
旋转设备中的液压泵、滚动轴承等部件在动力传动方面有着不可替代的作用,被广泛应用于航空航天、交通运输等重要领域[1-2]。一旦这些部件发生故障,将对工业生产整个过程的稳定性和安全性产生影响。然而,由于旋转机械固有的复杂性,对其进行有效的故障诊断变得十分具有挑战性。
随着数据驱动技术的日渐成熟,直接对故障数据进行深度挖掘以实现故障诊断成为可能。传统基于数据驱动的故障诊断方法通常包含括两个步骤,即故障特征提取[3-5]和分类模型训练[6-8]。为提高故障分类的效率,许多经典机器学习方法已被广泛使用,如随机森林(random forest,RF)、支持向量机(support vector machine,SVM)和极限学习机(extreme learning machine,ELM)等。但是,相关研究表明,上述浅层学习模型难以直接使用原始数据,需要依据特征工程提取故障特征。复杂的特征提取过程需要丰富的专业知识,且特征提取的好坏会严重影响诊断准确率。
深度学习的出现克服了这一不足,它可从原始数据中挖掘有价值的信息,避免依赖于专家知识的特征提取,从而实现端到端诊断。基于深度学习的故障诊断逐渐成为研究热点,深度置信网络(deep belief network,DBN)[9]、深度自编码器(deep auto-encoders,DAE)[10]、循环神经网络(recurrent neural network,RNN)[11]和卷积神经网络(convolutional neural network,CNN)[12]等深度学习方法被广泛地研究并应用。这些深度学习算法都属于深度神经网络(deep neural network, DNN)。众所周知,深度神经网络的超参数较多,需要进行微调,并且在训练数据不足时,很容易出现过拟合[13]。
相关研究表明,振动信号在表征旋转设备状态信息方面有着独特优势,振动信号分析方法也是国内外比较成熟的旋转机械设备故障诊断方法。但是,多数方法采用单源信号进行故障识别与诊断,而旋转机械设备发生故障时,会在不同方向表现出不同的振幅值和相位角,因此单源信号所获取的信息不全面,易造成误判[14]。
全矢谱(full vector spectrum,FVS)技术[15]可对两通道同步获取的振动信号进行有效融合,通过主振矢特征保证信息的完备性。此外,多粒度级联森林(multi-grained cascade forest,gcForest)是一种随机森林在深度学习上的衍生方法[16],又称深度森林,其超参数较少且模型大小可自适应调整。卞凌志等[17]针对增加级联森林层数后出现特征消失的问题,对级联森林进行了改进,提出了级联残差森林(cascade residual forest,grcForest)。PANG等[18]针对级联层中增强特征被淹没在原始特征中的问题,设置特征选择机制,提出了特征筛选级联森林(gcForest with feature screening, gcForestFS)。
综上,本文提出了一种全矢数据融合增强深度森林(full vector-grained residual cascade forest with feature screening,FV-grcForestFS)的旋转设备故障诊断新方法,实现对旋转机械端到端的故障诊断。首先将全矢同源信息融合技术与多粒度扫描相结合,提出全矢多粒度扫描(full vector multi-grained scanning,FV-MGS),以获得基于完备信息的特征向量;然后在级联森林的基础上添加类似残差网络的结构及特征选择机制,提出特征筛选级联残差森林(cascade residual forest with feature screening,crForestFS),用于接收FV-MGS输出的特征向量并进行分类。最后通过两种不同旋转设备故障诊断实验,验证所提方法的有效性。
1 全矢谱理论
旋转机械动态特征与多传感器信息融合技术相结合便产生了全矢谱技术。假设设备运转平稳,由转子动力学理论,它在两个垂直方向的运动学方程[19]如下:
(1)
Xci=XicosφxiXsi=Xisinφxi
Yci=YicosφyiYsi=Yisinφyi
式中,Xi、Yi分别为谐波ωi在x、y方向的振幅;φxi、φyi分别为谐波ωi在x、y方向的初始相位角,如图1a所示。
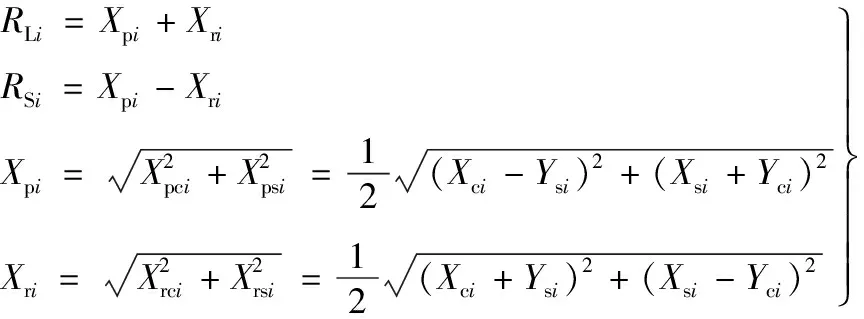
由式(1)可进一步推知转子涡动的轴心运动轨迹为一系列椭圆。轴心沿椭圆的运动可分解为沿两个正圆运动的合成,如图1b所示。这两个正圆定义为正进动圆和反进动圆,椭圆长短半轴可通过两圆得到[19]。椭圆长短半轴可由下式求得:

(a)坐标转换
(2)
式中,Xpi、Xri分别为两正反进动圆半径。
椭圆轨迹长半轴RLi被定义为谐波频率ωi下的主振矢,短半轴RSi被定义为该谐波频率ωi的副振矢。
为了保证全矢数值计算的快速性、稳定性,将x、y两方向上的振动信号序列{xn}、{yn}构造为复数序列{zn}={xn}+j{yn}(n=0,2,…,N-1),其中N为序列长度。复数序列{zn}由傅里叶变换可得到{Zn},进一步由傅里叶变换的共轭性可得
(3)
由上述数值计算可知,该种多传感器数据级融合方法计算简单可靠,兼容性强。实际情况中,加速度信号较位移信号幅度更高,因此同源位移信号可被同源加速度信号替代[20]。
2 全矢数据融合增强深度森林方法
深度学习技术因具有强大的表征学习能力而迅速发展,在各种应用中都取得了很大成功。本文所提FV-grcForestFS方法的深度学习功能是通过FV-MGS和crForestFS两部分实现的。
2.1 全矢多粒度扫描
多粒度扫描(MGS)采用了类似卷积神经网络的滑动窗口,用于扫描原始输入信号,旨在提取更多有用的特征信息。旋转设备振动信号呈现出复杂性、非线性和非平稳性[21],通过MGS提取故障特征较为困难,同时单通道信号分析所获取的信息总是不完备不充分,因此引入全矢谱融合技术对MGS加以改进,提出FV-MGS,其结构如图2所示。

图2 FV-MGS结构示意图

2.2 特征筛选级联残差森林
级联森林采用多层结构,每一层可包含多个不同的基学习器,如RF、CRF、XGBoost、LightGBM、CasCatBoost等[22], 它通过层数的增加来使模型获取更多的信息,但可能出现类似DNN梯度消失或梯度爆炸的问题。为了避免在级联层中增加随机森林层数时出现此问题,采用类似残差连接的结构,可在增加随机森林层数时使模型能够在保留之前效果的基础上向最优值靠近[17,22]。
在级联森林中,除第一层级外,其余各层级输入为原始输入特征与上一层级输出增强特征的拼接向量。原始输入特征比每层输出增强特征维数大很多,增强特征可能被淹没在原始输入特征中。特征筛选可以促进增强特征和原始特征之间保持平衡,提高各层模型的学习能力[18, 23],并且,通过筛选出无关特征,增加了每棵决策树分裂时选择相关特征的机会,通过增强单座森林的性能提高了整体性能。
因此,为减少级联森林特征消失及特征冗余,本文对级联森林增加残差连接和特征选择机制加以改进,提出crForestFS,其结构如图3所示。

图3 crForestFS结构示意图
在crForestFS的每个层级中,特征筛选是依据各个特征对模型分类的重要程度进行的,而基于树的森林模型可充分利用各层模型内决策树生成过程中的相关信息实现特征重要性量化。不同功能的决策树量化特征重要性有所差异,对于分类问题主要通过基尼系数进行最优特征选择。在基尼系数基础上,使用g(a)刻画特征a在各层模型中的重要性[23],计算如下:
(4)
式中,K为每座森林中决策树棵数,且每个级联层中包含四座森林;L为特征a在此层模型中被用作决策树节点划分的次数;Gini(Dl)为特征a在第l次被作为节点特征划分时,当前决策树节点中样本集的纯度;Gini(Dl,a)为第l次经过特征a分割后样本集的纯度。
假设给定决策树当前节点中的样本集D,特征a可将样本集D划分为W个不同子集,即D1,D2,…,DW,则Gini(D)与Gini(D,a)可由下式计算:
(5)
式中,C为D中样本的种类数;pc为第c类样本在D中所占比例;|D|为D中样本数量;Gini(D)越小,样本D纯度越高。
在crForestFS训练过程中,全部输入特征x用于第一层模型中所有森林的训练。之后,在各层模型训练开始之前,使用各个特征在上一层模型中返回的g值衡量其特征重要程度,并从上一层模型使用的原始输入特征子集中筛选出相对重要的特征。

(6)
式中,θ(0<θ≤1)为选择比例;|At|为第t层模型输入特征重要性和;zt(x)为t层原始输入特征子集。
crForestFS逐层学习可以看成从特征空间X(X⊆RM)到类别概率空间Y(Y=[0,1]C),进而得到类别Z={1,2,…,C}的监督学习映射问题,C为每个样本可能的标记类型。那么,crForestFS可由(h,f)二元数组形式表示。h=(h1,h2,…,hT),f=(f1,f2,…,fT),其中ht为第t层森林的集成;ft为级联至t层时模型的集成,t∈{1,2,…,T},T为模型层数。
对于层数t,X→Y的映射函数ft定义为
(7)
对于层级t,ht和ft都将输出类概率向量(p1,t,p2,t,…,pC,t),z1(x)为原始输入特征经过特征重要性选择后的子集。第一层h1(x)的输入为x;第二层输入为原始特征约减子集z1(x)与第一层输出f1(x)的拼接向量h2((z1(x),f1(x)));其余ht输入为t-1层输入特征子集zt-1(x)、前层级联输出ft-1(x)和第一层输出f1(x)的拼接向量(zt-1(x),ft-1(x),f1(x))。
改进级联森林模型M:X→Z可由(h,f)定义[18]:
M(x)=argmax([fT(x)]c)c={1,2,…,C}
(8)
式中,[fT(x)]c为类别向量fT(x)中第c类的预测概率。
为了避免过拟合,训练过程中样本的类概率特征向量和特征重要性度量都以k折交叉验证的方式获得。在级联森林的基础上增加残差连接与特征选择机制,并且设置森林树木棵数线性增加。随着级联层级的增加,从低到高去改变模型复杂性可以带来更好的泛化性能,同时可进一步降低内存要求和时间成本[24]。
2.3 总体结构
图4是FV-grcForestFS总体结构示意图,由设置多个不同大小的滑动窗口对双通道原始信号于旋转设备振动信号具有非平稳、非线性特点,故进行采样。类似于短时傅里叶变换思想,假设信号在很短的时间内是平稳的,通过窗函数切割成有限个平稳信号片段,使得模型具有一定的非线性信号处理能力,多窗口同时也可挖掘更多的有用信息。采用M1、M2、M3三种不同窗长在同一步长S下对P维双通道信号进行扫描,经过全矢融合以获得主振矢特征,不同窗长主振矢特征分别训练相应的森林子模型,通过FV-MGS分别得到R、U、V维增强特征向量。将三类特征向量拼接组成的R+U+V维向量作为crForestFS的输入,以训练集k(k=5)折交叉验证准确率为层级生长依据,最后将所有森林生成的类概率平均,取概率最大的类别为预测结果。

图4 FV-grcForestFS结构示意图
3 故障诊断实验及分析
为了评估所提出的旋转设备故障诊断模型的性能,进行了两种不同的实验验证。所使用计算机配置为:Intel Core i7-8750H 2.20 GHz CPU; 8 GB RAM; 512 GB SSD; 1 TB HDD,Python IDE为PyCharm 2020.1。
3.1 轴承故障诊断(实验1)
3.1.1数据集获取
在本实验中,使用来自XJTU-SY 的滚动轴承加速寿命实验振动数据集[25]去评估所提出的方法的性能。实验设备如图5a所示[25],滚动轴承型号为LDKUER204,共采集3类工况,每类工况5个轴承,共15个滚动轴承从正常运行到故障的数据。实验中振动信号采集频率为25.6 kHz,采样间隔时间为1 min,每次同步采样1.28 s同一截面水平和垂直两方向的同源振动信号。
XJTU-SY数据集在工况2250 r/min与11 kN下退化出现三种不同故障类型,即轴承2_1内圈故障、轴承2_2外圈故障、轴承2_3保持架故障,如图5b所示[25]。峭度对振动信号冲击特性十分敏感,当轴承出现故障时,瞬态冲击将会加剧[26],故对出现故障的轴承数据采用峭度指标进行选取标定。

(a)实验平台 (b)故障部件
提取轴承故障前期、中期同源双通道数据,每种类型顺序选取30组数据。选择轴承 2_1的第11~40组标记为正常状态数据。本实验采用无重叠截断的方式生成相应的训练集与测试集,其中窗口大小为1024个数据点,每种类型可生成900组样本,采用两种比例的数据集随机划分方法,得到数据集A1、B1如表1所示。
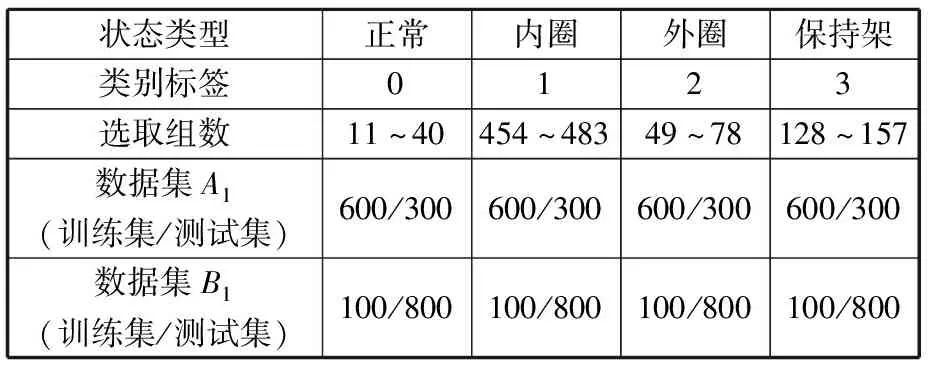
表1 XJTU-SY数据集及划分
3.1.2参数设定
FV-grcForestFS能够自适应更新关键模型参数(如级联森林的层数),并有着深度森林超参数少,模型对其不敏感等特点[27-28]。本文中,FV-MGS中森林树木棵数采用深度森林MGS默认设置[16],即30棵;crForestFS中森林树木棵数采用线性增长方式[24](即初始树木棵数设置为40,逐层步长设置为30,上限为200)。自适应生长条件设置为:若2层模型性能均未提高,停止生长,且丢弃这2层,并保存模型。同时原始深度森林级联层也采用同样参数,便于对所提方法优越性、先进性进行说明。
下面对扫描窗口的数量、大小及特征选择比例θ进行分析选取。在数据集A1上,改变不同窗长,重复实验20次,记录结果均值,如表2所示。

表2 不同窗长M的诊断结果对比
从表2中可知,单窗口长度M越大,FV-MGS所输出的增强特征向量的x维度越少,训练与测试所需时间成本越低。同时窗长越大,对信号的感受野越大,有着更好的信息挖掘能力,但增强特征维度的减少会导致模型泛化性降低,故测试准确率在单窗口上表现为先升再降。
多窗口的测试准确率高于单窗口的测试准确率,但时间成本相应更高。多窗口可对样本进行多尺度采样,从而获得更多的样本信息。三种多窗口的测试准确率相近,但{256,512,1024}窗口搭配方式的时间成本最低。综上分析,设置扫描窗口长度分别为256、512、1024,扫描步长为64,在保证获取样本信息多样性的情况下,最大化计算效率。
在数据集A1上,改变不同特征选择比例θ,得到的结果如表3所示。其中,lmax表示最大级联层数。

表3 不同特征选择比例θ的诊断结果对比
从表3中可知,当θ取值较小时,crForestFS并不能得到有效扩展生长,此时保存的模型中最大级联层数lmax仅为1。随着θ值的增大,有效特征保留数量增加,crForestFS能通过级联生长获得更好的性能,同时训练时间有所增长。当θ值为0.7~0.9时,测试准确率相近,当θ=0.9时,最大级联层数lmax为4。当θ=1时,训练所需时间有较大增长,测试准确率也有所下降,大量的冗余特征增加了训练时间成本,也使得测试集准确率下降。综上,将θ设置为0.9,以此获得最佳性能。
3.1.3诊断结果及分析
为对crForestFS的有效性进行分析,在数据集A1上采用FV-MGS提取增强特征向量,将crForestFS固定生长层数设置为10,绘制出每层训练集交叉验证准确率和所需训练时间,结果如图6所示。为保证结果的准确性,重复实验20次,将均值和标准偏差作为结果记录。由图6可以看出,crForestFS的准确率较传统级联森林的准确率略有提高;对于训练时间,crForestFS对无效特征进行筛减,有效减少特征维数,减短模型训练时间近50%。

(a)训练集交叉验证准确率
为了说明所提出FV-MGS方法的优越性,将数据集A1中X通道信号、Y通道信号分别输入MGS,X、Y同源双通道信号输入FV-MGS中,分别得到相应的增强特征向量,然后输入crForestFS,模型参数同上。结果如图7所示,相对于单通道信号MGS,FV-MGS的训练时间大幅缩短,同时测试集准确率也有所提高。

图7 全矢多粒度扫描的性能(实验1)
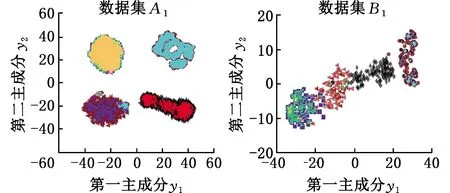
为了可视化故障识别性能,采用t分布随机邻域嵌入(t-distributed stochastic neighbor embedding,t-SNE)[29]描绘一次实验中MGS与FV-MGS输出特征的二维图。图8所示为单源信号经MGS和同源双通道信号经FV-MGS提取特征的t-SNE可视化结果,可以看出,对于不同训练数据集大小,FV-MGS较MGS能更有效地提取故障特征,可以清楚地区分轴承的4种状态。
(a)X(MGS)
为验证FV-grcForestFS的优越性,采用三种传统浅层模型(RF、ELM、SVM)和两种深度学习模型(gcForest、CNN)与所提出模型的性能进行比较。
考虑到浅层模型难以直接从原始信号中挖掘有效信息,使用db3小波对Y通道信号进行三层小波包分解,取其第三层子带能量谱作为特征向量。RF中设置决策树棵数为200,决策树分枝标准依据特征基尼系数,其余参数采用默认值。ELM中隐层神经元数目设置100,激活函数选择Sigmoid函数。SVM中核函数采用高斯径向基(RBF)核函数,惩罚因子与RBF核参数通过鲸鱼优化算法(whale optimization algorithm,WOA)[30]来实现最佳选择。WOA设置种群数量为10,迭代次数30,惩罚因子与RBF核参数取值范围均为[0.01,100]。
深度学习模型能自适应地从原始振动数据中挖掘有效信息,因此直接对原始振动信号进行诊断。gcForest相关参数与FV-grcForestFS设置相同,其级联森林中每座森林树木棵数也逐层增加以便于对照分析。CNN网络模型设置为三个卷积层、三个池化层、一个全局最大池化层和一个全连接层。卷积层C1卷积核大小为128×1,个数为7,池化层P1大小为3×1;卷积层C2卷积核大小为64×1,池化层P2大小为5×1;卷积层C3卷积核大小为32×1,池化层P3大小为5×1;全连接层F的神经元个数为32,设置Dropout机制,Dropout率为50%。模型训练次数设置为100,batch_size为128,优化函数采用Adam,学习率为1×10-3。
各类算法诊断结果对比如表4所示。

表4 实验1各类算法诊断结果对比
表4结果表明,RF在传统浅层模型中诊断准确率最高,同时在训练集数据较少时也有较好的性能,但由于其需要提取小波包子带能量作为特征向量,导致测试时间较长。相比于传统浅层模型,深度学习模型在诊断准确率上更高。CNN所需测试时间最短,但它受训练集数据规模影响较大,在训练集数据较少的情况下,性能下降较为明显,并且训练所需时间较长。所提出的FV-grcForestFS在两种不同规模训练数据集上诊断准确率分别为99.81%和99.19%,比其他方法更高,训练时间在深度学习模型中也最短。对于测试时间,由于FV-MGS时间花费较长,造成整体检测时间较CNN更长。尽管如此,这三种深度学习模型在识别速度上仍处于相同量级。综合来看,FV-grcForestFS用于滚动轴承的故障诊断时具有较高的诊断准确率和诊断效率,这对工程实际应用有着重要意义。
3.2 液压泵故障诊断(实验2)
3.2.1数据采集
本实验所需的数据采集于液压泵故障模拟实验台。液压原理如图9所示,使用固定在柱塞泵壳体上的三个振动加速度传感器进行同源信号采集,分别为径向水平方向X、径向垂直方向Y和轴向Z。实验台部分主要元件的性能参数如表5所示,实物照片如图10a所示。
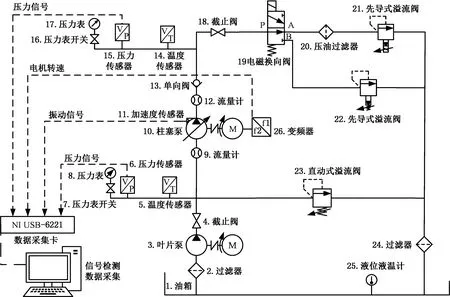
图9 液压泵故障模拟实验台液压原理图
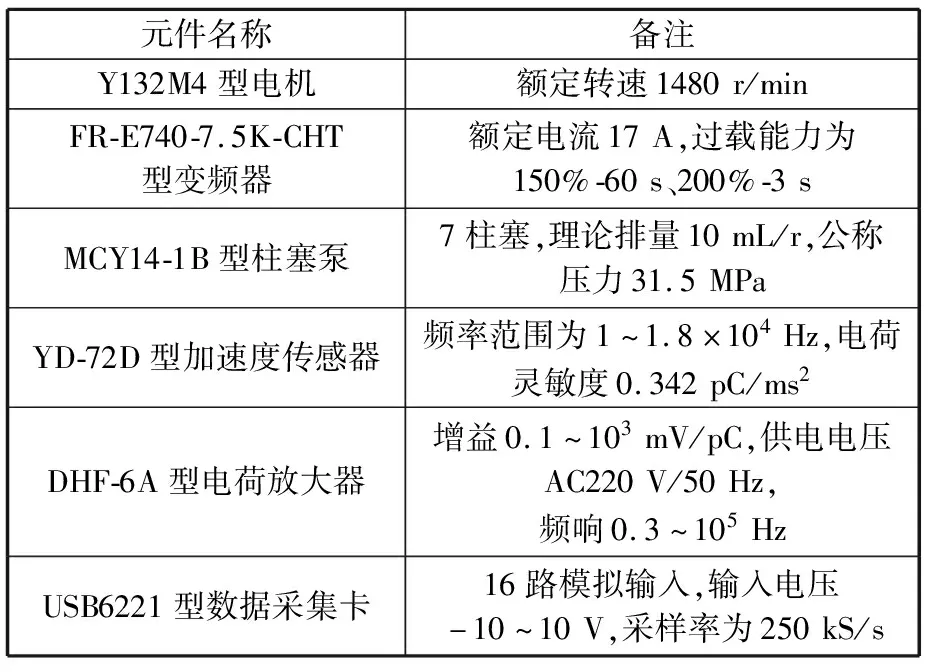
表5 实验台主要元件
数据采集软件采用NI公司的LabView,该采集系统可以保证同源双通道20 kHz的采集速率。实验前,准备好相应的故障替换部件,包括滑靴磨损(轻、中、重)、松靴(轻、中、重)、中心弹簧磨损(轻、中、重)和斜盘磨损,如图10b所示。

(a)实验台 (b)故障替换件
在实验中,调定工作压力为15 MPa,对X、Y、Z方向的振动信号进行采样,采样频率设为20 kHz。通过故障件替换正常件的方法进行故障注入,实现对柱塞泵不同故障下的同源振动信号采集。采集时间设置为10 s,即每组采集2×106个数据点。本实验采用重叠截断的方式生成相应的训练集与测试集,其中截断窗口大小为1024个数据点,重叠大小为512。每种类型可生成380组样本,并采用了两种不同比例的数据集划分方法,得到数据集A2、B2,如表6所示。

表6 液压泵数据集及划分
3.2.2诊断结果及分析
在本实验中,FV-grcForestFS、gcForest以及各对比方法的参数与实验1设置相同。FV-MGS性能如图11所示,可以看出,相对于单通道信号MGS,FV-MGS使模型在训练时间以及测试准确率上都有较大改善。单源信号经MGS与同源双通道信号经FV-MGS提取特征的可视化结果如图12所示。

图11 全矢多粒度扫描的性能(实验2)
由图12可以看出,单通道信号经MGS处理无法有效提取增强特征,各类型样本重叠严重,这也导致模型诊断准确率较低。与之相比,同源信号经过FV-MGS处理后,可清楚地区分液压泵11种不同状态,即便是小训练样本依然有较好表现。

(a)X(MGS)
使用混淆矩阵对20次重复实验中的一次测试结果进行展示,图13所示为FV-grcForestFS在两种不同比例数据集A2、B2上的诊断结果。由图13可以看出,在两种不同比例数据集上,FV-grcForestFS对柱塞泵各种不同程度状态类型均能做到有效识别。
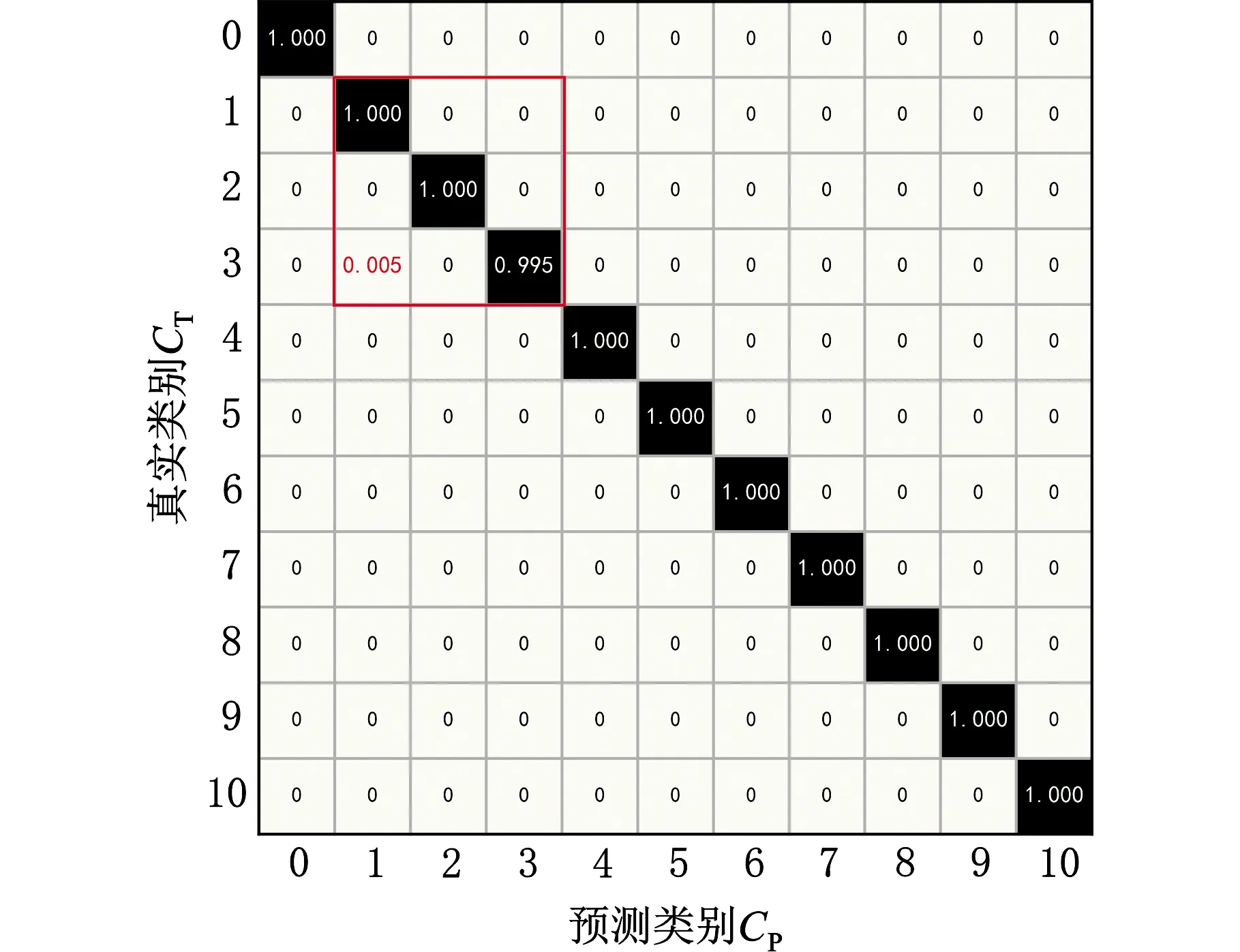
(a)数据集A1
表7所示为各类算法故障诊断结果,可以看出,由于柱塞泵故障具有种类多、程度变化大的特点,给诊断带来了难度。因此,传统浅层诊断方法在两种比例数据集上性能较差,也表明液压泵比轴承诊断难度更大。当各类训练集样本数量为260时,CNN和gcForest模型诊断准确率分别为95.30%和95.81%,而FV-grcForestFS接近100%。同时FV-grcForestFS模型在各类训练集样本仅为40的条件下,也达到了99.23%的诊断准确率,远高于其余模型的诊断准确率。因此,所提出的FV-grcForestFS模型能有效地对液压泵进行故障诊断,既能区别出不同故障类型,同时又能分辨出不同的故障程度。

表7 实验2各类算法诊断结果对比
4 结论
(1)全矢多粒度扫描(FV-MGS)能有效提取旋转设备完备的故障信息,弥补单源信号信息不完备的弊端,为提高故障诊断准确率提供了可靠特征。
(2)特征筛选级联残差森林(crForestFS)能对输入特征进行筛选,通过剔除无效特征来进行特征约减,在提高性能的同时使每层模型训练时间节约近50%。
(3)将所提FV-grcForestFS与三种传统浅层智能诊断模型(ELM、SVM、RF)和两种深度学习模型(CNN、gcForest)进行比较,FV-grcForestFS在轴承与液压泵故障诊断实验中的端对端诊断准确率均达到了99%以上,远高于其他模型结果,训练时间相较于深度学习模型也最短,且在小训练样本条件下(训练/测试约为1∶8.5)仍能分别达到99.19%和99.23%的故障识别准确率。
(4)尽管所提端对端模型取得了较高的诊断准确率和较短的训练时间,但是FV-MGS中全矢数据融合的加入与其特殊的数据传递机制,会在一定程度上导致测试时间的增长。在未来的研究中,将探究优化FV-MGS,进一步提高故障诊断效率,使其更适于工程实际应用。
猜你喜欢
核安全(2022年3期)2022-06-29
一重技术(2021年5期)2022-01-18
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
农业科技与信息(2021年2期)2021-03-27
健康体检与管理(2021年10期)2021-01-03
电子制作(2018年10期)2018-08-04
北京航空航天大学学报(2016年6期)2016-11-16
汽车电器(2014年5期)2014-02-28
汽车与新动力(2014年4期)2014-02-27
