基于新一代测绘技术的水上水下地形一体化测量及库容测定——以淄博市马踏湖为例
2022-06-24 07:22江伟伟
科学技术创新 2022年18期
江伟伟 魏 鹏 高 洋
(淄博市水文中心,山东 淄博 255000)
1 概述
智慧水利水资源的调度、洪水的演进分析、风险模拟预警以及生态管理等需要高精度的水上水下精准地形作为支撑[1]。水库和湖泊的库容在确定水资源的调度、洪水演进分析中发挥着重要作用。影响水库库容精度的主要因素包括库容的计算方法以及库区的地形数据。其中库容的计算方法主要有断面法、等高线法等[2,3],其成果精度较低,难以满足智慧水利应用需求。随着测绘计算理论的进步,基于特征点的三角网法和密集点云的格网法用于库容的精确库容测定[4]。库区的地形数据主要包含陆表地形和水下地形两部分。早期,主要采用全站仪或RTK 方式进行测量特征点的陆表特征信息,利用测深杆或测深锤获取水下地形特征信息,该技术仅能采集少量的特征点刻画陆表和水下地形[5]。随着单波束测深设备的出现,RTK 和单波束设备广泛应用于水上水下地形信息的采集,该技术能够快速采集陆表和水下特征点,为基于特征点的三角网估算库容量提供了数据基础[6]。新一代测绘技术中,无人机技术由于工作效率高、受地形与环境的限制较小,被广泛用于大比例尺测绘、资源的调查、电力的巡检等方面,通过倾斜摄影技术为库区复杂陆表测量提供了新方法。新一代便携式多波束测深系统具有高分辨率、高精度、高适用性等特点,通过获取密集点云数据精确表达水下地形[1,2]。将无人机技术与新一代便携式多波束测深系统集成,生成密集点云精确模拟复杂库区的陆表和水下地形,解决库区地形环境复杂导致的测量困难、测量范围不全以及精度低的问题。本研究以淄博市马踏湖为例,采用新一代无人机和多波束测深系统等测绘技术获取湖区陆表和水下地形数据,并采用密集点云格网法精确计算模拟实验区库容,为湖区水资源生态的调度以及智慧化管理提供支撑。
2 测区概况
马踏湖,位于山东省桓台县境东北部,小清河南岸,桓台县与博兴县两县交界处,地处泰沂山脉北麓山前洪冲积与黄泛冲积平原的迭交凹地。以荆夏公路为界,路南为锦秋湖,路北为马踏湖,因两湖彼此衔接,融为一体,故统称为马踏湖(见图1)。地势呈槽状东西向条带分布,由西南向东北缓倾,地跨起风镇7 个自然村,荆家镇18 个自然村,田庄镇13 个自然村和邢家乡6 个自然村。整个湖区南北长13.5km,东西宽16.5km,总面积124.255km2(其中锦秋湖81.1725km2,马踏湖43.0825km2),占全县总面积的24.38%。马踏湖规划库容水量达500 万m3,平均水深6m,最高水深8m,主湖区约0.78km2,湿地区域约1.5km2。

图1 马踏湖测区图
3 研究方法
湖区地形的测量包括陆表地形和水下地形测量两部分。陆表地形测量采用固定翼无人机搭载DG3 五镜头倾斜相机对马踏湖主湖区及湿地2.3km2范围进行数据采集,获取密集陆表的密集点云。其中DG3 镜头有效像素1.2 亿,焦距为40mm 像元尺寸为0.0033mm。水下地形采用无人船搭载HN-400 集成多波束测深系统,对马踏湖主湖区及湿地间交叉的河道进行水深测量,获取密集点云的水下地形信息。
多波束测深系统与倾斜摄影技术结算结果可以输出高密度点云的标准网格数据,不需要对数据进行插值与拟合即可建立DEM,因此本研究采用DEM 网格法进行库容的模拟计算。
4 湖区库容测量方法
4.1 陆表地形测量采集
陆表地形测量采用P30 固定翼航测系统进行数据采集,该系统采用PPK 差分GNSS 系统,成像精度高,航测POS 定位准确,采用100Hz 超高频GNSS 解算算法,可以大幅度减少像控点数量。为保证数据采集质量,最终确定航拍时间为12 月1 日晴朗天气的9:00-16:00,依据研究区实际情况设计了航测的范围与路线。
陆表地形数据采集需要物理像元尺寸与航高、地面分辨率满足三角比例关系。测绘过程中依据项目精度需求提前规划好飞行区域和飞行参数后,进行数据采集,飞行航高为150m,空间分辨率为3.0cm,旁向重叠度75%,航向重叠度85%。
4.2 水下地形数据采集
水下地形数据采用华微号搭载的HN400 多波束系统进行采集。该系统集成了惯导姿态测量设备,能够准确获取船体的位置、姿态、速度、升降,加速度和角速度矢量,保证无人船在不同流速、流向变化的复杂条件下按照计划航线行驶,航线偏离小于20cm,确保多波束数据采集过程中横摇姿态平稳,提升数据精度。HN400 艏向精度为0.06m@4m 基线,纵横摇精度为0.03°,水平方向定位精度±(8mm+1ppm)、垂直方向精度±(15mm+1ppm),条带宽度7°-210°,垂直分辨率小于10mm。
为保证数据采集质量,最终确定水下地形采集时间为12 月1~5 日的8:00-17:00,依据研究区实际情况分为主湖区以及湿地主河道设计了航测的范围与路线,同时保证条带覆盖率在20%以上,HN400 系统支持发射频率为200 ~700kHz 的声波,为获取高分辨率高精度的测深数据,测量中全部采用700 kHz 进行采集,并保持声波发射开角小于180°。
水下地形数据采集前,进行仪器校准工作,以获取换能器与姿态传感器的偏差信息,通过控制系统让船体走“8”字形,获取横摇、纵摇和艏向等系统校准参数,并同步采集剖面声速数据,计算相关校核系数,保证采集的水下地形数据符合限差要求后,进行湖区和河道的全覆盖数据采集。
5 水上水下地形数据处理及库容计算
5.1 无人机倾斜摄影数据处理
航拍影像的处理包括畸变差校正、空中三角解算、影像匀光处理以及点云和正射模型的生成。影像数据量大,处理需要花费大量的时间,而Smart 3D 软件能够集群运算并且具备精度高,处理速度快的特点。因此,本研究选择Smart 3D 软件进行处理,将无人机拍摄的原始数据导入Smart 3D 软件中,主要包括倾斜影像数据、PPK 差分解算的POS 数据等。通过将PPK 后差分解算的POS 信息作为每个像元的初始方位元素,利用空间后方交会,计算出每个像元的真实外方位元素,采用多基线多特征匹配技术生成大量的连接点,仅需少量的外业控制点,通过区域网平差,即可完成多视角联合空中三角解算。空三解算结果满足精度的情况下,依据解算的三角网信息形成白模并获取相应的纹理,将纹理自动映射到相应的白模上,最终形生成真实的三维场景模型、DSM、DOM、三维高密度点云及质量分析报告。
马踏湖国家级湿地保护区陆表无人机数据处理质量报告如表1 所示,数据处理质量报告主要包括区域网空三解算误差、自检校误差以及控制点误差。

表1 马踏湖国家级湿地保护区陆表无人机数据处理质量报告
5.2 水下地形数据处理
多波束数据处理主要包括剔除导航、水深等测量数据的粗差,利用检测线数据对测量数据进行检核与精度的验证。本研究采用与多波束测深主测线相垂直的单波束检查线进行检核,主测线总长为75.6km,检查线总长为6.8km,检查线与主测线之比为0.086,检核结果如表2 所示,测量结果满足测深精度评价规范要求。

表2 主测线与检查线测点高程误差对比分析
5.3 湖区库容量计算
结合无人机倾斜摄影与多波束测深技术,获取了马踏湖主湖区2.3km2的陆表和水下密集点云数据,两种数据具有统一的平面坐标系和高程系,利用Quick Terrain Modeler 软件将陆表和水下点云数据进行融合,形成马踏湖区水上水下一体化地形数据(图2)。从图2 可见无人机倾斜摄影与多波束坐标一致,两种数据边缘处无缝对接,融合结果较好。

图2 马踏湖主湖区陆表与水下点云融合图
由于多波束和无人机倾斜摄影采集的点云数据密度高,格网间距固定,不需要进行内插即可建立高精度的DEM。本研究采用DEM 方法进行库容计算。该方法将水体微分成若干小的立方体,通过对每个立方体的体积求积分得到水库库容。其数据计算公式如下:

其中,式1 中n 为淹没方格网的数量,a 为DEM 方格网边长,h0为某一设计水位,hi为设计高程以下淹没的某单元高程,S 为水面面积,V 为设计水位库容量。
为了准确地绘制马踏湖湖区的库容曲线,为防洪、生态流量分析提供科学依据,本研究以0.01m 为间隔,进行库容计算,结果见图3。从图3 可知,输入对应的水位,即可查询相应库容量。本研究预测水位为8.5m 时对应的最大库容为400 万m3,与实际情况相吻合。
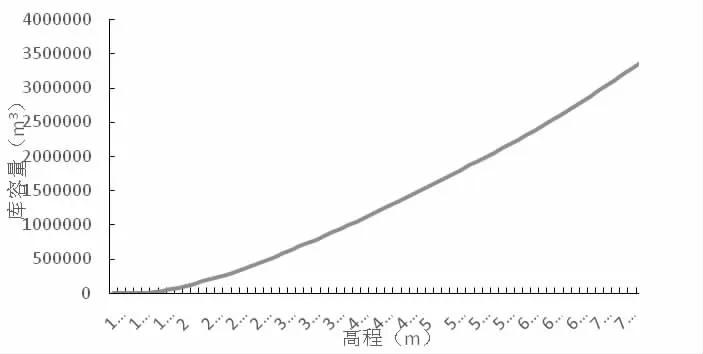
图3 马踏湖湖区库容量模拟图
6 结论
6.1 无人机与多波束结合的新一代测绘技术具有便携、效率高等特点,有利于库区陆表与水下地形的测量,为智慧水利洪水调度、水资源生态管理提供更加精准的三维可视化数据。
6.2 通过数据的处理与分析,验证了无人机与多波束测量数据的精度,并进行了湖区库容量的计算与分析,通过实际案例说明了该新一代测绘技术在库容量测定中的可行性,为水利、水文信息的精细化管理提供可靠的数据,在智慧水利建设中具有重要应用前景。
6.3 本研究采用高密度点云进行计算,数据量大,抽希数据可提高计算效率,如何在保证精度的前提下提高计算效率以及边缘植被信息的过滤是下一步研究的重点。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
舰船科学技术(2022年11期)2022-07-15
舰船电子对抗(2021年2期)2021-06-16
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04
海峡旅游(2018年4期)2018-06-01
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
世界文学评论(2016年1期)2016-11-25
河北渔业(2015年7期)2015-07-21