
延时网络控制系统的鲁棒L1控制器设计
2022-07-04 01:02梁艳崔岩岩
电子测试 2022年10期
梁艳,崔岩岩
(大庆技师学院机电工程系,黑龙江大庆,163255)
0 引言
网络控制系统(Networked Control Systems,简称NCS),是随着计算机技术、控制科学工程以及网络通讯等各学科技术不断发展而兴起综合产物。在某一区域内的网络条件下,NCS是传感器、执行器、控制器主要功能部件以及通信网络相连接进行信号交换和传输的集合,这样不同地点的用户在这一区域内可在实现资源共享的同时进行协调操作以及对实时反馈控制系统的全网络化[1][2]。NCS与点对点结构的传统系统相比而言,优势在于实现了远程控制与操作,而且还增加了系统的可靠性和灵活性,但同时由于在数据传输过程中,带宽局限性、传输路径的不确定性等诸多因素都会导致信息在传输过程中有等待、阻塞以及丢失的现象出现,延时的产生则不可避免,而且在多数情况下,也是不可忽略的,因而成为国内外研究的热点。目前,NCS的实际应用远远领先于其控制理论的研究,使得控制理论发展面临着严峻的挑战,针对网络控制系统目前的研究现状,对其理论研究和分析就具有及其重要的现实意义。
稳定性是系统的重要特性,也是在控制理论研究和控制系统设计中最基本问题。在经典控制理论中,虽然建立了根轨迹判据、奈奎斯特稳定判据等各种判据来分析判定线性时不变控制系统的稳定性,但是它不能实现最优控制;在现代控制理论中,俄国学者李雅普诺夫(Lyapunov)采用状态变量对系统进行描述,求解系统方程来判定收敛性,分析和设计方法更具准确性,从而提出了确定系统稳定性理论,能够实现最优控制;不仅适用于线性、时不变、单变量系统,而且还适用于非线性、时变、多变量系统。系统的Lyapunov稳定性[3]是指系统在运行过程中,受长时间扰动的影响,原来的平衡状态被打破后再次恢复到平衡状态的能力。
L1(峰值-峰值)控制问题是相对于持续有界扰动输入设计一个控制器在最劣情况下时滞系统输出信号的最大幅值。近年来,根据线对性矩阵不等式技术研究,国内外学者采用峰值-峰值设计方法已经对滤波、降阶等问题进行了研究,但都基于一般系统。因此,对于延时网络控制系统的峰值-峰值优化问题的研究仍是一项重要工作。
本文针对延时网络控制系统,研究了鲁棒峰值-峰值控制问题。首先基于参数依赖Lyapunov函数思想以及线性矩阵不等式技术[4],得出延时网络控制系统的峰值-峰值性能判据,在保证闭环系统渐近稳定的条件下,设计控制器,这种算法降低了其保守性。将L1性能约束引入延时网络控制系统的鲁棒控制中,设计鲁棒L1控制器[5]保证闭环系统渐近稳定且具有L1性能约束[6][7]。
1 问题描述
在网络控制系统[8]中由于有多节点共享网络,网络带宽等多方面的限制,信息在传输过程中,不可避免出现交叉碰撞和连续重发的现象,这样信息在传输时,就会发生数据包的丢失和延时。图1为数据包丢失的延时网络控制系统,图2为图1的等效图。

图1 数据包丢失的延时NSC
下面对图2的等效网络控制系统进行分析。
这样,将具有数据包丢失和网络延时的网络控制系统重新构建的数学模型,就转变为具有随时间变化的时变时滞系统

2 延时网络控制系统L1控制器设计
当延时NCS闭环系统(1)渐近稳定且具有L1性能准则,对状态控制器进行求解,这时控制器参数K为待求变量,这样我们推算所求的矩阵不等式LMI就变成了双线性矩阵不等式,下面针对NCS构建的数学模型(1)的控制器进行求解,给出下面的如下定理。
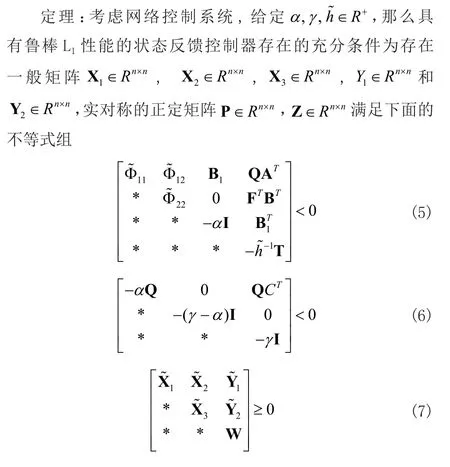

注:L(1峰-峰)增益的上界γ的最小值取决于于α的选择,为了获得更紧的γ界,需要对α执行的一个线性搜索。尽管在很大程度上,锥补线性化(CCL)算法能够找到全局最优解,但不能保证总是全局最优且收敛,所以通过算法1所求的可行性解是次优的。
3 数值算例
考虑延时网络控制系统的被控对象的状态方程为
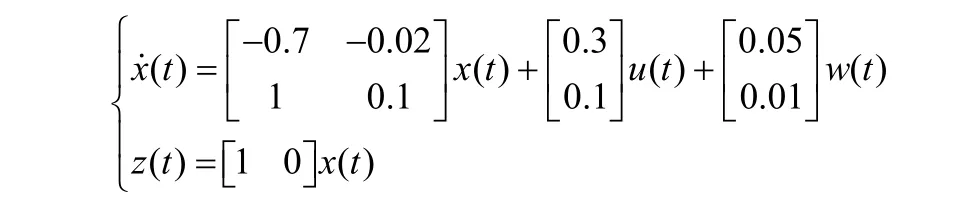
通过上述定理的算法1,γ= 6 ,α=0.2通过MATLAB进行求解,可以得到延时网络控制系统控制器的可行性解。

图3 闭环系统的状态
3 结束语
本文研究了延时NCS的鲁棒L1控制器设计,根据Lyapunov稳定性理论、鲁棒L1性能指标以及运用锥补线性化(CCL)算法得出其L1控制器的设计方法并对其进行求解,用MATLAB进行仿真,从而验证该设计方法的有效性和可行性。
猜你喜欢
军民两用技术与产品(2022年3期)2022-06-05
快乐作文(1.2年级)(2022年5期)2022-05-31
纺织服装周刊(2022年16期)2022-05-11
物流科技(2022年2期)2022-05-07
计算机与数字工程(2022年3期)2022-04-07
三悦文摘·教育学刊(2021年52期)2021-04-27
物联网技术(2018年8期)2018-12-06
软件导刊(2016年7期)2016-05-14
中国新通信(2016年2期)2016-03-11
对联(2015年22期)2015-06-11
