波浪中自由自航船舶轴系功率特性的数值预报方法
2022-07-05 03:41余嘉威姚朝帮张志国冯大奎王先洲
中国舰船研究 2022年3期
余嘉威,姚朝帮*,张志国,冯大奎,王先洲
1 华中科技大学 船舶与海洋工程学院,湖北 武汉 430074
2 华中科技大学 船舶和海洋水动力湖北省重点实验室,湖北 武汉 430074
0 引 言
在传统的船舶设计过程中,一般主要考虑静水条件下船舶阻力和自航性能对船舶快速性和经济性的影响[1]。然而,在实际航行过程中,船舶将不可避免地因风、浪、流等环境因素作用而发生显著运动,导致波浪增阻和失速,从而影响船舶的经济性。因此,对波浪中而不仅仅是静水中的自航船舶的运动特性和适航性能开展评估和优化工作,对于船舶安全和经济而言至关重要。
目前,船舶耐波性能预测主要有3 种实现方法:模型试验、势流理论和黏性计算流体动力学(computational fluid dynamics,CFD)模拟。实验流体动力学(experimental fluid dynamics,EFD)可以为 CFD 验证提供最可靠的数据和不确定性分析结果,虽然这种方法的周期长、成本高,但目前仍然不可替代。近年来,由于保真度高、成本低和精度高等优点,CFD 逐渐被视为预测和评估船舶耐波性的有效方法。Simonsen 等[2]采用 EFD 和 CFD研究了韩国船舶与海洋工程研究所(Korea research institute of ships and ocean engineering,KRISO)的集装箱船(KRISO container ship,KCS)标准船模在静水和迎浪规则波中的性能,并选择了 URANS软件 CFDSHIP-IOWA,STAR-CCM+ 和势流程序AEGIR 进行了CFD 模拟;EFD 数据的不确定性分析评估结果表明,静水不确定性的水平与平面运动机构(planar motion mechanism,PMM)相当,而波浪的水平则更高;与势流结果相比,使用 URANS 软件 的运动和平均阻力结果更接近测量数据。魏成柱等[3]采用URANS 方法研究了新概念高速穿梭艇系列单体船、双体船和三体船在波浪中的航行性能。张明霞等[4]基于STAR-CCM+研究了小水线面三体船的耐波性,发现小水线面三体船侧体靠近船艏时的耐波性更优。Jin 等[5]采用STAR-CCM+ 预报了2 艘液化天然气(liquefied natural gas,LNG)运输船在规则波中迎浪和斜浪的流体动力特性,通过不确定度分析评估了数值不确定性之后,研究了不同波浪条件下船舶的载荷和运动;计算结果与 EFD 和势流程序预测结果的一致性较好。
除了波浪环境,转动的螺旋桨也会导致船舶受到动态因素的影响,包括随时间变化的尾流分布、推进因子、船舶运动、失速或储备功率等。随着船舶设计水平的发展,研究波浪中螺旋桨载荷波动对船舶航行性能的影响具有重要的意义,因为该工况下发动机功率和转速将产生巨大的波动。王建华等[6]使用 CFD 结合动态重叠网格技术研究了自航标准船模ONRT 在迎浪规则波中的运动响应和失速情况,CFD 与 EFD 结果的一致性表明了该方法适用于波浪中的自航预测。Lee 等[7]使用URANS 结合有限体积法和流体体积模型(volume of fluent model,VOF)预测了KVLCC2 船模的功率增加/速度损失和推进性能,进行了静水及波浪中的拖曳和自航仿真计算,预报了自航因子、阻力和波浪增阻等情况,并采用泰勒展开法、直接动力法、负载变化法、等推力法等4 种方法研究了波浪中的速度–功率关系和推进性能。
综上所述,目前船舶耐波性方面的研究工作主要以约束模的试验和仿真为主,然而,在螺旋桨对自航模船舶运动特性的影响,以及对自航模储备功率或波浪失速及其推进性能等方面的研究成果则非常少。为此,本文拟基于KCS 船模和KP505 桨模,采用URANS 方法进行船舶波浪自由直航CFD 模拟,通过自研URANS 求解器HUSTShip 与自研结构化动态重叠网格代码HUSTOverset 耦合求解船舶在波浪中的自航运动,并将选取基于叶元–动量混合方法的改进型体积力螺旋桨推进模型,以兼顾预报精度、可靠性和计算效率[8-10]。首先,研究波浪中两自由度(垂荡、纵摇)KCS 约束模的运动响应特性和波浪增阻,并通过试验数据验证波浪中数值计算的可靠性;然后,采用改进体积力方法对不同波浪情况下三自由度(垂荡、纵摇和纵荡)KCS 自航模进行直航仿真,以研究KCS 在自由直航状态下波浪中的运动响应特性、储备功率和推进效率,从而对比分析相同遭遇频率下约束模与自航模船舶的运动特性差异;最后,采用对数分析法对波浪中船舶自由直航功率增加的主要成分及其具体占比进行详细分析,用以为波浪中自由自航船舶轴系功率的特性数值预报提供参考。
1 数值方法
1.1 控制方程与改进体积力模型
本文将采用自研 CFD 求解器 HUST-Ship 开展静水和波浪中的拖曳和自航CFD 仿真,其中HUST-Ship 的可靠性已通过各种螺旋桨、船舶和水下航行器在静水和波浪中的仿真得以验证[8-12]。通过对连续性方程和动量守恒方程进行时间平均,即可得到雷诺平均Navier-Stokes(RANS)控制方程:
此外,本文选择了双方程涡黏性k- ω模型作为湍流模型[13]。
所谓体积力方法,即在艉部添加一个简化的圆柱区域代替螺旋桨,同时在动量方程右端添加一个体积力项fbi以产生螺旋桨相应的力和力矩。本文将采用改进型体积力(modified Osaka University method,MOUM)[6]模型,这是一种考虑了三维螺旋桨黏性效应的叶元体动量理论(blade element momentum theory,BEMT),其在迭代计算中将采用该时刻桨盘面处的瞬时速度作为螺旋桨进速。
1.2 自由液面捕捉
1.3 造波与消波方法
在HUST-Ship 中,将采用速度边界造波方法[15]来产生目标波浪。当仿真的目标波浪波长为λ,波高为A时,其入口处的自由液面变化l(t)为

速度边界上对应的速度分量为


式中:A,k, ω,φ分别为子成分规则波的波幅、波数、圆频率、初始相位;d为水深;x1,x3和u1,u3分别为第1 个和第3 个坐标方向的坐标和速度;在消波过程中,为了减少波浪反射对仿真结果的影响,本文使用了网格衰减和动量消波2 种方法。
1.4 PI 速度控制器
在自航控制中,比例积分(proportional integral,PI)速度控制器是一种直接通过自由直航匹配螺旋桨转速的方法[16],其原理是通过比例积分调节器来控制船速以符合设定值,即

式中:n为螺旋桨转速;P为比例系数;e=utar−uship,为目标航速utar与实际航速uship之间的差值;I为积分系数。
在自研软件HUST-Ship 中,P,I值将在计算初始时刻予以给定,然后随着每个计算时间步而变化,直至达到目标航速并实现船长方向的受力平衡,由此即完成自航点下的转速匹配。
2 工况与网格
2.1 仿真工况
本文仿真的船舶模型和螺旋桨模型分别为带舵的KCS 集装箱船和KP505 螺旋桨,缩尺比为1:37.89,该模型的敞水、阻力、自航和迎浪运动响应的实验数据均源自Tokyo2015 研讨会[17]。根据Tokyo2015 的试验工况,设定如表1 所示的CFD仿真工况(两自由度),其中:Lpp为船舶垂线间长;弗劳德数Fr=0.26 对应的航速,波浪中自航的转速则可以通过 PI 速度控制器进行匹配。

表1 CFD 仿真工况的参数设置Table 1 Parameter setting of CFD simulation cases
2.2 结构化重叠网格
本文将采用结构化动态重叠网格,并通过自研重叠网格程序HUST-Overset 予以处理。自研重叠网格程序是基于结构网格的格点式重叠,包括3 个步骤:挖洞、寻点和识别贡献单元。首先采用基于均匀网格的笛卡尔坐标网格的洞映射方法进行挖洞,然后基于交替数字二叉树(alternating digital tree,ADT)的数据结构来寻找插值点的贡献单元,其中贡献单元与插值点的关系可以采用三线性插值来获取[18-19]。
重叠网格技术可以将复杂的物体分解为若干简单的部件,然后对各个部件单独划分网格,并将各个部件网格嵌入到背景网格中。例如,本文中的KCS 曲面较为复杂,可以将主船体、艉部及舵单独划分网格,然后拼接为整船网格,如图1 所示。当采用多套彼此不相关的网格覆盖整个计算域时,各套网格之间将存在重叠的部分,需通过挖洞处理将计算域之外的网格挖去,然后对剩余重叠区域的网格建立插值关系,因此可以在每套网格之间通过重叠区域进行数据交换,进而对整个计算域进行求解,所以重叠网格具有网格生成效率高、壁面模拟能力强及可以有效处理复杂空间几何模型等优点。为了捕捉船体和螺旋桨周围的精细流动,本文对图1 所示的网格进行了大量加密,根据特定需求进行自由加密也是重叠网格的一个优势。

图1 离散桨自航工况的结构重叠网格Fig. 1 Structured overset grid for self-propulsion case of discrete propeller
3 仿真结果分析
3.1 波浪中拖航仿真
首先,按照Tokyo2015 研讨会[15]所提供的试验条件,在规则波迎浪条件下对KCS 约束模进行仿真,结果如图2 所示。仿真中释放了垂荡和纵摇2 个自由度,规则波波长范围为 0.65Lpp~1.95Lpp,陡度为恒定值(A/λ = 1/60)。图2 中对比了4 种波浪条件下x1=0 处波高的时历CFD 仿真曲线与EFD 理论值曲线,可以看出,两者几乎一致。

图2 规则波的仿真结果与理论结果对比Fig. 2 Comparison between simulation results and theoretical results of regular wave
然后,根据国际拖曳水池会议(international towing tank conference,ITTC)所推荐的不确定度方法规程,开展波长为1.95Lpp波浪条件下阻力系数CT、垂荡传递函数TF3和纵摇传递函数TF5的不确定度分析。表2 所示为不同网格和不同时间步长下的不确定度分析结果,表3 所示为基于试验数据的验证结果,其中:rG和rT分别为网格、时间步长的细化率;SG1,SG2,SG3和ST1,ST2,ST3分别为稀疏、中等、加密网格和稀疏、中等、加密时间步长的不确定度分析结果;UG和UT分别为网格、时间步长的不确定度;USN为数值不确定度;UD为试验不确定度;UV为验证不确定度;D为试验数据。分析结果表明,所有的比较误差E均小于验证不确定度UV,即表明本文在UV水平下验证了数值计算结果。该波浪条件下,仿真预报的运动响应与试验结果的误差不大于1%。图3 为垂荡和纵摇运动响应的仿真曲线与试验曲线,可见仿真误差均小于5%,这表明HUST-Ship 可以准确地预报船舶在波浪中的运动。

图3 垂荡和纵摇运动响应的仿真曲线与试验曲线Fig. 3 Simulation curve and test curve of heave and pitch motion response

表2 不同网格和时间步长下的不确定度分析结果Table 2 Uncertainty analysis results under different grids and time steps

表3 基于试验数据的验证结果Table 3 Validation results based on test data
3.2 波浪中自航仿真
本节在4 种波浪条件下进行波浪自航仿真,其中自航模释放了垂荡、纵摇和纵荡3 个自由度,以目标航速2.017 m/s 为控制目标,并采用PI 控制方法来匹配该目标航速所对应的螺旋桨转速。KCS 船模在不同波浪下迎浪自航的螺旋桨转速和相对航速的时历仿真曲线如图4 所示。

图4 KCS 船模在不同波浪条件下自航过程中的螺旋桨转速和船速曲线Fig. 4 Propeller rotation speed and ship speed curves for KCS self-propulsion simulations under different wave conditions
图5 所示为波浪中自航模与约束模这2 种不同仿真方法的运动响应对比曲线,可见看出,相较于约束模,KCS 自航模在迎浪中的船舶运动响应传递函数值偏低,但偏差小于5%。由此可见,螺旋桨对船舶运动幅度的影响非常小,从而验证了采用拖曳试验预报自航船舶在波浪中运动响应的合理性。
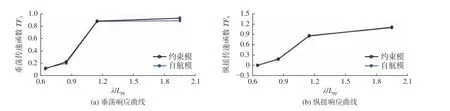
图5 波浪中自航模与约束模的垂荡与纵摇响应曲线Fig. 5 Heave and pitch response curves with/without propeller in waves
表4 中所示为波浪增阻与波浪中自航的仿真结果,其中,ΔR为波浪增阻,Q为螺旋桨扭矩。

表4 波浪增阻与波浪中自航的仿真结果Table 4 Simulation results of added resistance and selfpropulsion in waves
为了详细分析船舶在波浪中功率增加的影响成分及占比,本文将采用对数分析法[20]对船舶推进效率η=Ru/2πnQ进行详细分析,即量化波浪增阻R、航速u及推进效率η 对波浪自航储备功率2πnQ的贡献百分比,具体如下:

式中,下标w 和cw 分别表示波浪和静水工况。由于本文的仿真过程以航速为控制目标,故最终状态的平均航速uw=ucw。
结合式(7)及表4 的仿真结果可知,KCS 船模在波浪中自航时的功率增加主要由推进效率和波浪增阻这2 个因素所致,其中推进效率和波浪增阻对功率增加的贡献占比分别为23%~26%和74%~77%,即储备功率主要因波浪增阻所致,而波浪增阻主要因船舶运动所致,因此,减小船舶运动以降低波浪增阻是降低波浪中功率增加的最有效方法。
4 结 论
本文基于KCS 船模和KP505 桨模,通过自研URANS 求解器HUST-Ship 与自研结构化动态重叠网格代码HUST-Overset 耦合求解了船舶在波浪中的自航运动,并采用URANS 方法开展了船舶波浪自由直航CFD 模拟,得到如下结论:
1) 根据CFD 结果与EFD 数据的对比结果,验证了采用HUST-Ship 耦合重叠网格代码HUSTOverset 求解船舶在波浪中运动响应的可靠性。
2) 根据波浪中自航模与约束模的仿真运动响应结果,自航模的船舶运动响应传递函数值偏低,但偏差小于 5%,因此,螺旋桨对船舶运动响应的影响很小,从而验证了采用拖曳试验来预报自航船舶在波浪中运动响应的合理性。
3) 船舶在波浪中的功率增加主要由推进效率和波浪增阻两方面因素引起,其中波浪增阻的贡献占比更大。
猜你喜欢
航空世界(2019年1期)2019-10-11
航空模型(2017年5期)2017-12-14
中学科技(2017年10期)2017-11-04
儿童故事画报·自然探秘(2017年3期)2017-06-29
小学生时代·大嘴英语(2014年6期)2014-11-04
航海(2014年4期)2014-08-28
语文世界(小学版)(2014年3期)2014-08-02
中学科技(2009年5期)2009-12-17
小学生导刊(中年级)(2007年5期)2007-07-03