
基于磁场-温度场耦合的高压开关柜梅花触头有限元数值计算
2022-07-05 05:42冀立鹏刘宏亮刘保凯贾冬明
中国测试 2022年6期
冀立鹏,甄 利,刘宏亮,董 驰,刘保凯,贾冬明
(1.国网河北省电力有限公司邢台供电分公司,河北 邢台 054001; 2.国网河北省电力公司,河北 石家庄 050021;3.国网河北省电力有限公司电力科学研究院,河北 石家庄 050000)
0 引 言
梅花触头凭借其接触点多、导电性好和接触电阻小等优点,被广泛应用于电力系统当中[1-2]。梅花触头的作用主要是用于连接高压设备,是一种弹性连接组件。目前,梅花触头发热现象频有发生,这将会引发一系列的电力系统故障,甚至会造成无法挽回的安全事故[3]。梅花触头在长期工作过程当中,由于触头的接触不良或短路情况而引起过热的现象,若未能及时处理就会导致热故障的发生[4-5]。因此,梅花触头在实际工作过程中的接触状况和温度场分布情况需要倍加关注。
目前,关于梅花接头的研究文献还较少,主要集中于实验测量和仿真模拟两个方面。在实验测量方面,文献[6]对高压开关柜隔离触头的触头弹力进行了测量,并分析了系统误差、环境影响和零件磨损对测量结果的影响。文献[7]研究了接触式和非接触式的测温传感器在高压开关柜触头实际安装方式下的测量精度。由于实验测量成本高,代价大,尤其是对故障情况下的实验研究,具有一定的破坏性,因此计算机仿真模拟起到了很好的替代作用[8-9]。文献[10-11]对带有记忆合金材料的梅花触头进行了温度场仿真和温升试验,分析了两种异常接触方式下梅花触头的安全性。文献[12]建立了大电流开关柜仿真模型,通过分析和计算触头接触电阻,进行不同载荷条件下开关柜多物理场耦合仿真。文献[13]基于传热学基础理论,利用COMSOL有限元分析软件建立高压开关柜触头的仿真模型,分析了触头温度分布,总结出温度检测的最佳位置。文献[14]基于电路和电磁场耦合关系模型,研究了插入式梅花触头的暂态温升变化情况,计算了短路电流冲击下触点处最大温度值。文献[15]通过虚拟材料法和有限单元法模拟了梅花触头的温度场分布情况,可以很好地体现出接触电阻特性和多物理场耦合特性。为了研究梅花触头的电动设计可靠性和接触失效原理,文献[16]建立了梅花触头电动力计算模型,分析了短路情况下不同触指结构的电动力分布以及接触失效机理。上述文献表明,采用实验的方式模拟梅花触头的故障,成本高、代价大。而采用仿真方式进行故障模拟具有高效便捷的优势。目前文献中关于梅花触头的多物理场耦合仿真的研究仅针对某种单一工况进行了模拟,而多种故障工况下的梅花触头仿真有待进一步研究。
本文搭建了梅花触头三维仿真模型,通过分析导电桥模型和磁场-温度场耦合数学模型的基础理论公式,并基于有限元数值计算方法完成梅花触头在不同工作电流下的稳态多场耦合仿真和不同故障电流下的暂态多场耦合仿真。仿真结果可以很好为梅花触头在额定工况和故障工况下的运行状态提供有效参考。
1 梅花触头模型与仿真
1.1 梅花触头三维结构模型
本文对GC5-1250/12 kV式梅花触头进行建模及仿真研究,利用Solidworks建模软件所搭建的梅花触头仿真模型如图1所示,从图中可以看出该梅花触头模型主要由导体和触头构成。其中触头共有30个触指,触头内部由铜合金材料构成,而导体内部材料由铝合金构成,关于铜合金和铝合金的材料参数如表1所示。为了降低多物理场耦合仿真的计算量以及复杂性,做出了如下3个假设:
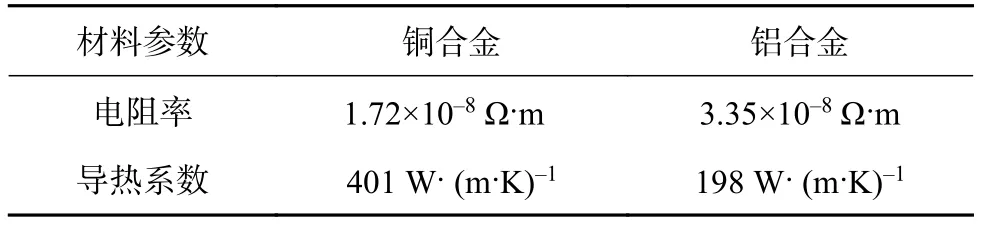
表1 梅花触头的重要材料参数
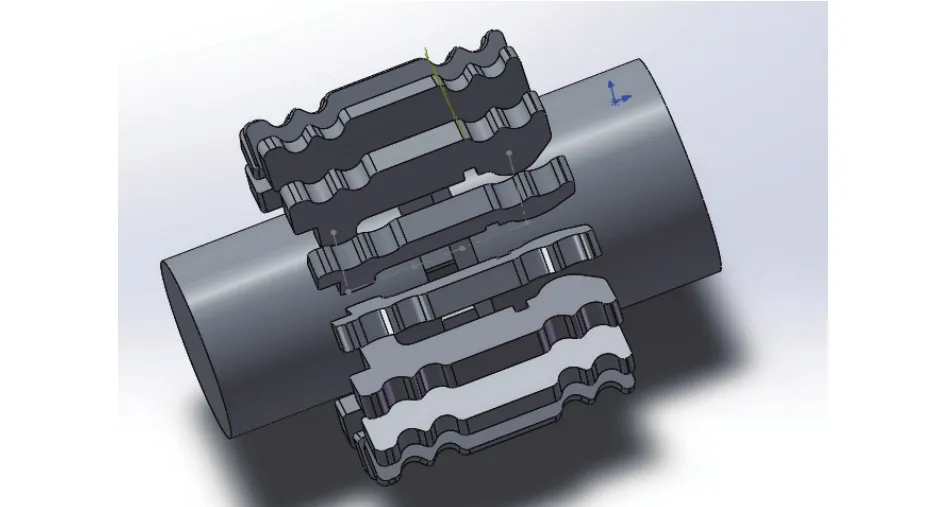
图1 梅花触头三维结构模型
1)触指与导体表面为弹性形变;
2)不考虑导电斑点间的分布及相互作用;
3)不考虑梅花触头材质的非线性特性。
1.2 导电桥模型
受制于梅花触头生产制作工艺的限制,触指表面难以达到百分百的光滑程度,即难免存在微小的凹凸点,这些凹凸点会导致触指表面与导体表面的实际接触面积变小,电流在流动过程中聚集于微小凸点触,该位置也相应地产生附加电阻值,即收缩电阻。本小节介绍了导电桥模型,该模型可以很好地模拟这一收缩效应。导电桥模型将电流在接触面上传导的过程视为通过一个等效导电斑点来实现,斑点的半径可由如下Hertz公式得到:

式中:a——导电斑点半径;
F——两接触平面的接触压力;
R*——接触半径;
E*——两接触物体材料的等效弹性模量。
对于由m根抱紧弹簧固定的梅花触头,单个触点上接触压力为:

式中:Fj——单片触指与导杆间的接触压力;
K——弹簧的刚度系数;
n——梅花触头的触指数量;
D1、D0——导杆插入前和插入后弹簧的内外直径平均值。
1.3 磁场-温度场耦合数学模型
根据热力学基本理论可以得到梅花触头的导热方程如下所示:

式中:ρ——导体密度;
Cp——导体的比热容;
T——温度;
t——时间;
λ——导体的导热系数;
Q——内热源。
忽略动静触头内部的空气流动,即对该区域只考虑热量的内部传导,而触头外部认为是以热对流和热辐射的形式进行散热,因此需求出对流换热系数和辐射换热系数,根据传热学第三类边界条件进行表征。对流换热系数a为:

式中:λ——导体的导热系数;
L——表面特征尺度;
ΔT——触指与空气的温度差值;
A*——参数,值取决于流体的温度和种类。
2 梅花触头磁场-温度场耦合仿真结果分析
2.1 仿真计算流程
关于梅花触头温度场仿真的整体流程如图2所示。首先是依据梅花触头的结构参数构建出梅花触头仿真模型;然后利用ANSYS软件对上述梅花触头三维进行单元剖分,其中剖分单元为四面体单元,节点数为37 953个,单元数为5 995个,网格剖分示意图如图3所示;再根据1.2小节中的导电桥模型,结合剖分后的仿真模型进行磁热耦合有限元仿真计算。最后对梅花触头不同工况进行仿真,得到梅花触头在正常额定电流和故障短路电流下的温度分布。

图2 仿真计算流程图
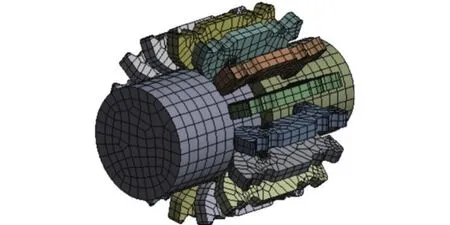
图3 梅花触头网格剖分示意图
2.2 计算结果与分析
首先是进行稳态磁场-温度场耦合仿真,设定额定电流为1 250 A,梅花触头的初始温度与环境温度均为25 ℃,其对应的稳态温度分布如图4所示。从图中可以看出触指端部温度最高,触片本体温度最低,其中最高温度为51.929 ℃,最低温度为51.338 ℃。而实验所检测出来的触指端部温度为52.1 ℃,与仿真结果基本保持一致,验证了有限元仿真模型的准确性。
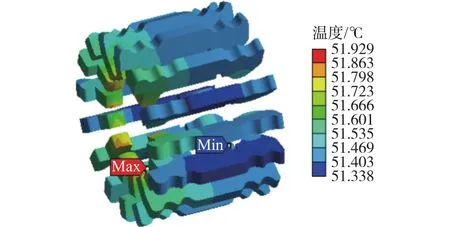
图4 梅花触头在额定电流1 250 A时的温度分布
不同稳态电流下梅花触头本体与触指端部的温度变化曲线如图5所示。从图中可以看出,随着稳态电流的增大,本体温度与触指端部温度均呈曲线增大趋势,且触指端部温度要略大于本体温度。该现象表明,触指端部的接触面上电流密度较大,热生成率较高,因此导致温度集中增大的现象。
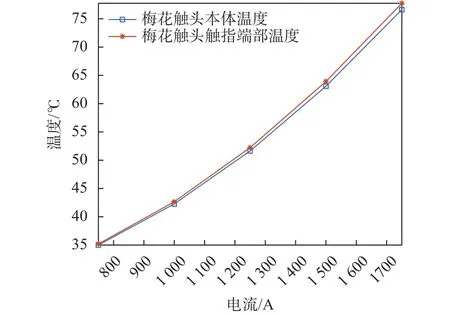
图5 不同稳态电流下梅花触头的温度变化曲线
高压开关柜在发生短路故障时梅花触头承载的电流要远高于额定电流,触头内部会在短时间内急剧升温,从而会造成触头松动、接触电阻增大情况发生,最终引发高压开关柜安全事故。因此本文首先对梅花触头在30 kA时的暂态温度分布进行仿真分析,研究短路工况下梅花触头的温度分布情况。图6为梅花触头在30 kA/5 s时的暂态温度分布,其中最大温度为101.98 ℃,最小温度为34.301 ℃,两者相差 67.679 ℃;图7 为梅花触头在 30 kA/10 s时的暂态温度分布,其中最大温度为158.24 ℃,最小温度为75.475 ℃,两者相差82.765 ℃;图8为梅花触头在30 kA/15 s时的暂态温度分布,其中最大温度为 236.86 ℃,最小温度为 132.07 ℃,两者相差104.79 ℃。仿真结果表明,短路工况下梅花触头的整体温度均大幅上升,并且触指温度要明显高于其他区域。

图6 梅花触头在30 kA/5 s时的暂态温度分布
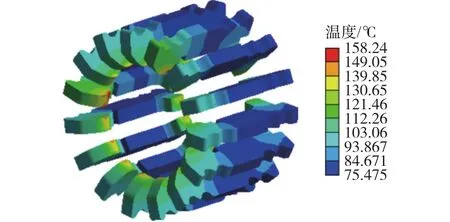
图7 梅花触头在30 kA/10 s时的暂态温度分布
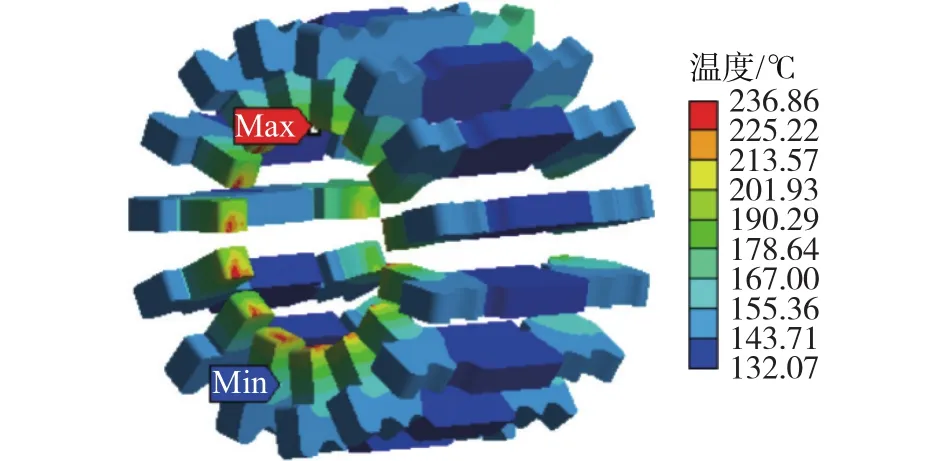
图8 梅花触头在30 kA/15 s时的暂态温度分布
当暂态电流为30 kA时,不同暂态时间下梅花触头的温度变化曲线如图9所示。从图中可以看出,随着暂态时间的增大,梅花触头的本体温度和触指端部温度也逐渐增大。
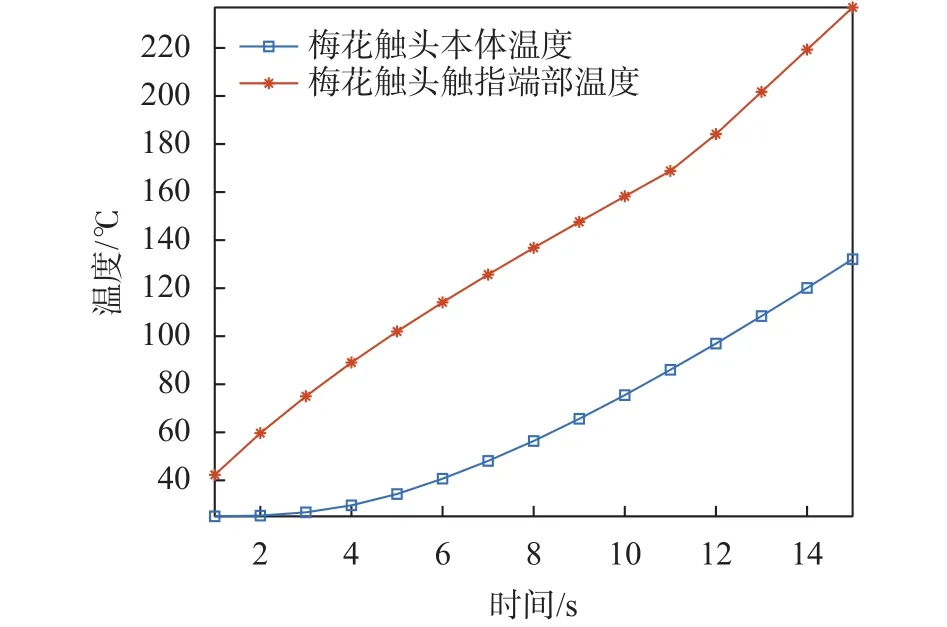
图9 不同暂态时间下梅花触头的温度变化曲线
当暂态仿真时长为15 s,此时不同暂态电流下梅花触头温度变化曲线如图10所示。当暂态电流在20~40 kA变化且逐渐增大时,梅花触头本体温度和触指端部温度呈增大趋势,两者温差较为明显且随着暂态电流的增大温差也越来越大。

图10 不同暂态电流下梅花触头的温度变化曲线
3 结束语
本文基于磁场-温度场耦合的有限元仿真研究了梅花触头在额定电流及短路故障下的温度分布。文中根据梅花触头的结构参数和材料参数建立了三维有限元仿真模型,利用导电桥模型实现了梅花触头的多物理场耦合仿真,发现在1 250 A额定电流下梅花触头最高温度出现在触指处,且明显高于其他区域。在稳态工作情况下,随着额定电流的增大,梅花触头本体和触指端部的温度逐渐增大,两者温差较小。而在短路故障情况下,随着短路电流的增大或暂态时长的增大,梅花触头的本体和触指端部的温度也不断增大且远高于额定状态下的温度,两者温度较大。在外加30 kA/15 s短路电流时,梅花触头的最高温度可达到236.86 ℃。因此,在实际运行时要注意梅花触头的温度监测以及触指的结构设计。
猜你喜欢
电气电子教学学报(2022年2期)2022-05-23
湖南电力(2021年4期)2021-11-05
能源工程(2021年2期)2021-07-21
舰船科学技术(2021年12期)2021-03-29
飞天(2020年8期)2020-08-14
电子制作(2019年19期)2019-11-23
建材发展导向(2019年5期)2019-09-09
科技风(2018年32期)2018-10-21
电子制作(2018年14期)2018-08-21
科技风(2018年30期)2018-07-09
