民用无人机发展管理现状及路径规划研究进展
2022-07-09 01:39陈亚青郑稀元韩丹刘成
科学技术与工程 2022年15期
陈亚青, 郑稀元, 韩丹, 刘成
(1.中国民用航空飞行学院民航飞行技术与飞行安全科研基地, 广汉 618307; 2.中国民用航空飞行学院空中交通管理学院, 广汉 618307; 3.中国民用航空飞行学院航空电子电气学院, 广汉 618307)
无人机(unmanned aerial vehicle,UAV)是无人驾驶航空器的简称,目前无人机根据应用领域。可以分为军用无人机和民用无人机,其中民用无人机又可以再划分为消费级无人机和工业级无人机。在近几年无人机保有量持续提升的背景下,无人机运行环境的安全性如何保证得到了大量的讨论和研究。如果一大批无序飞行的民用无人机在繁忙的空域中运行,将对地面设施、公共安全和传统民航航空器等造成损害的安全隐患。为保证安全,民用无人机应该尽可能与民航飞行器一样,运行过程接受严格的管理,尤其在无人机的飞行过程中应受到实时监控,确保运行环境的安全[1]。
无人机作为全球新一轮科技革命和产业革命的热点,为预防无人机爆发式增长下带来的诸多问题,包括中国在内的许多国家相继提出了自己的无人机管理系统框架以及管理办法。2015年,中国民用航空局颁布了第一部关于无人机的管理条例《轻小型无人机运行规定》,开始尝试对民用无人机进行综合性管理。随后几年,中国在民用无人机的管理方法上不断完善,逐渐形成了一套符合中国国情的民用无人机管理框架。
民用无人机技术起源于军用无人机,一开始中国民用无人机的研究大多是借鉴军方,后来,应用于民用无人机的路径规划算法被大量研究和开发。到目前为止,各大高校和科研机构发布了一系列的无人机路径规划研究成果,进一步促进了中国无人机的研究发展。
在近年来民用无人机爆发式增长的背景下,为探究民用无人机今后的管理方法,综合分析民用无人机的发展现状,介绍中外现有民用无人机管理手段;而后重点分析中外无人机路径规划的现状和进展,并指出今后民用无人机路径规划的发展趋势,以及中国所需重点突破的研究对象。
1 民用无人机发展与管理现状
1.1 民用无人机发展现状
无人机根据气动布局,主要分为固定翼无人机、多旋翼无人机、无人直升机、垂直起降固定翼无人机[2]。其中垂直起降固定翼无人机兼具了固定翼无人机和多旋翼无人机的特点,对起降场地要求低,可以空中悬停,适用于大面积、长航时作业,可携带荷载作远距离探测,具有应用优势[3]。典型的无人机系统主要由无人机、地面控制站以及二者之间的通信链路组成[4]。其中无人机部分包括:如电池、电机和螺旋桨等的动力系统用于提供稳定动力;维持无人机的稳定和进行操纵的主控制器;与地面站进行通信的通信链路;还有传感器和任务执行单元等构件。地面站主要由遥控器、智能终端和相应的通信链路设备构成。无人机操纵者的指令通过地面站传输到无人机,使无人机执行相应的操作;无人机采集到的信息数据等都会传输到地面站,由地面站的显示器或智能终端等进行显示和储存数据[5]。无人机系统功能结构如图 1所示。
1.1.1 中国民用无人机发展现状
据中国民航报统计,截至2020年末,中国全行业注册无人机共52.36万架,2020年无人机经营性飞行活动高达159.4万飞行小时,与2019年同比增长36.4%[6]。伴随着人工智能、半导体、传感器等的快速发展,无人机系统通过信息、卫星和通信等技术快速迭代,不断拓展能力和应用领域。根据《无人机系统发展白皮书》[7]预测,至2029年,全球无人机系统将保持复合年增长率20%以上,10年内产值累计超过4 000亿美元。中国无人机2014—2019年发展情况如图 2所示,其中,2018年与2019年广东省无人机产品产值达到了当年的98.5%和96.9%[9]。中国民用无人机从2014年起产品产值呈指数式增长,同时研究文献数量逐年增多,至2017年到达顶峰。2017年后,中国民用无人机产值趋于平稳,无人机研究数量逐渐放缓,产值与研究总量依旧居高。
中国对民用无人机的应用前景探索以及结合北斗卫星[10]、太阳能技术[11]、5G通信[12]等各类高新技术产业以扩展民用无人机的使用环境研究从未停止。在计算机算力不断提升的背景下,许多计算速度快、精度更高的无人机路径规划算法不断出现,同时无人机被赋予了更多的职能和任务[13]。2011年后,针对民用无人机+的应用研究也如雨后春笋般多了起来。周志艳等[14]和张东彦等[15]分别探究了无人机在植保和农业方面的应用,利用无人机相比人工作业,具有成本低、速度快、精度高的特点,提升农林植保的作业效率,加速中国农林业的智能化自动化进程;在测量应用领域。李亚东等[16]探究了民用无人机航拍测量技术在森林蓄积量估测中的应用,用无人机代替了繁重的野外森林人工调查工作,同时与机载雷达或高分辨率卫星影像相比有着更低的拍摄成本。在救援领域方面,雷天杰等[17]探究分析了无人机在洪涝、气象和地质地震等灾害下的监测、巡查与防护的应用,重点介绍无人机在“5·12”汶川地震中对灾情调查、房屋与道路等损害情况的评估,以及灾区恢复重建等的亮眼表现。无人机在灾害救援中探索速度快、范围广以及避免造成人员二次伤害等优点,因此在救援领域的应用中有着极高的适配度。南江林[18]则充分利用无人机机动性高、视野范围广、可搭载作业设备等特点,研究无人机在消防领域中监视火情,传递火场信息,投送救援物资等的作用。与此同时,无人机在警用[19]、基建[20]、医疗[21],尤其是物流[22]领域也有着不俗的表现。近10年来,无人机的产品产业不断发展,应用场景不断拓宽。总结中国民用无人机产品和产业发展特点,如表1所示。
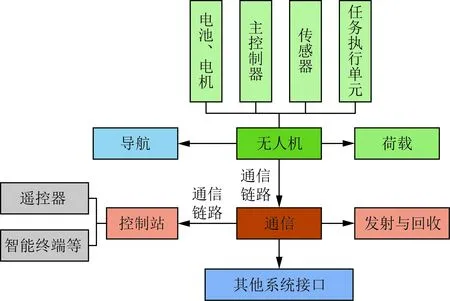
图1 无人机系统功能结构Fig.1 System function structure of UAV

图2 2014—2019中国民用无人机发展情况[8]Fig.2 Development of UAV from 2014 to 2019 in China[8]
得益于无人机工业产业链配套的成熟,以及中国各高校学者和科研机构对无人机技术的开发和升级,中国无人机产品在世界范围内有了一足之地[23]。同时,中国无人机产业存在着诸多不足。由于无人机产品性价比不高,技术水平还有很大的提升空间,导致国产无人机接受程度低、受众规模小,使得无人机很难在消费市场全面推广普及,在一定程度上制约了中国民用专业无人机产业发展。对此,中国应该从设计、研发、制造等技术领域延伸到无人机管理、服务、保障领域,进而触及社会生产生活更广更深的层面,逐步形成一条新的产业链条。通过提升生产制造能力及供应链管理和质量控制能力,增强产业链高度信任磨合,加强顺应时势与需求导向的市场推广,健全完善的销售渠道与售后服务中心等,使无人机及周边产业互相促进,共同成长,构建产业发展的良性循环格局,实现民用无人机产品产业协同化发展。
1.1.2 国外民用无人机发展现状
20世纪90年代—21世纪初,全球卫星定位系统(global positioning system, GPS)、微电子机械系统(micro electro-mechanical system, MEMS)和磁力同步自动驾驶机等新兴科技的应用使军用无人机的性能更加优秀,各国在继续推进军用无人机技术的同时,也尝试用各种方法推动无人机向民用领域发展。近年来民用无人机的科技和产品迭代速度远快于军用无人机,使得民用无人机的市场规模迅速扩大,同时潜在市场也正被一点一点发掘。下面将分别阐述欧美民用无人机发展情况与趋势。
(1)美国。根据美国联邦航空管理局(Federal Aviation Administration, FAA)统计,2019年底,美国共170.5万架25 kg以下级别的小型无人机,其中包括132万架航模无人机和38.5万架小型商用无人机。在无人机使用人数方面,美国共10.8万个在册登记的无人机运营人,另外还注册有99万个航模无人机爱好者。在现有数据的基础上,FAA预测,2024年全美将拥有230.8万架小型无人机,拥有执照的无人机驾驶员(也称“飞手”)将增长到34.9万人。FAA还根据数据抽样推算得出,2019年,美国航模无人机或娱乐无人机约有1 500万小时的飞行量,商用小型无人机达到约700万飞行小时,所有小型无人机飞行量约2 200万飞行小时,这一数据已经超过2019年美国运输航空飞行时间,已经基本和通用航空总飞行时间持平。

表1 中国无人机产品和产业发展特点Table 1 Development characteristics of UAV’s products and industries in China
全球消费类无人机规模在2010年代实现爆发式增长,但近年来消费类无人机增长逐渐放缓。根据数据推算,FAA预测美国消费类无人机将在2024年达到峰值150万架,但商用无人机将保持年均17%的快速增长,到2024年达到82.8万架,其中价格在1万美元以上的专业类无人机将从2019年2.5万架增长到2024年的12.4万架。
(2)欧洲。根据欧盟市场预测,欧洲到2025年将拥有720万架民用无人机数,其中约700万架消费类无人机和约20万架商用或政府用途的专业无人机。同时欧洲无人机机构预测,到2035年欧洲的无人机直接从业者将达到10.5万人;到2050年,欧洲无人机产业总工作岗位将达到(25~40)万个。欧盟预测在2025年,消费类无人机将达到700万架的峰值,同时商用或政府用途无人机将持续增长,根据从2015年的9 000架增长到2020年的8.6万架推算, 2030年将拥有37.3万架商用或政府用途无人机。同时欧盟还预测到2050年,将有1.2万架大型无人驾驶进入欧洲高空空域,占运输航空机队规模的28%;2050年欧洲中高空大型无人机飞行时间和飞行距离分别将达到700万飞行小时和 40亿km。150 m以下超低空的无人机飞行时间将超过3.5亿飞行小时,飞行距离达到170亿km[26]。
无人机下一个规模市场是城市空中交通(urban air mobility, UAM)甚至是先进空中交通(advance air mobility, AAM)。近年来,电动垂直起降(electric vertical takeoff and landing, eVTOL)无人机的开发吸引了世界各国包括航空航天业、汽车业和学术界等的广泛关注。eVTOL必将是决定航空业下一阶段发展的关键条件。
1.2 民用无人机管理现状
1.2.1 中国民用无人机管理现状
为规范民用无人机的使用,中国民用航空局发布了一系列规章条约,以保障民用无人机的安全运行与平稳发展。2015年,民航局发布了第一部关于民用无人机的管理规章《轻小型无人机运行规定》,该规章对无人机根据空机重量和起飞全重两项指标对无人机进行分类管理,奠定了中国民用无人机管理办法的基调。其中还定义了无人机、无人机系统、无人机围栏等专业名词以及视距内运行(visual line of sight,VLOS)和视距外运行(beyond visual line of sight,BVLOS)的相关规范,为后期无人机的发展奠定了基础,同时也代表民航局开始探索中国无人机管理的试行办法。2017年,民航局发布了《无人机适航管理路线图》,开始着重规划中国的无人机适航运行管理。同年发布了《民用无人驾驶航空器实名制登记管理规定》,要求在中国境内最大起飞质量不小于250 g的民用无人机的拥有者必须进行实名登记。2018年发布的《无人驾驶航空器飞行管理暂行条例(征求意见稿)》要求重点对最大起飞重量大于250 g小于7 kg的消费级无人机进行监管,并详细划设了微型和轻型无人机的禁飞区,以进一步进行管理。随后发布的《低空联网无人机安全飞行测试报告》和《轻小型民用无人机飞行动态数据管理规定》等一系列的无人机管理法规,逐步搭建起中国的无人机管理体系并不断完善。
2019年,民航局飞标司、空管办和适航审定司联合发布《特定类无人机试运行管理规程》,这是中国在民用无人机管理上的一次创新性的尝试。在国际尚无成熟管理经验的情况下,该规程采用特定运行风险评估(specific operation risk assessment, SORA)方法,为无人机的运行评估提供理论支持。该方法适用于任何类型和任何尺寸的无人机,拟从事包括实验、研发以及原型设计等的运行风险评估,但不包括无人机之间空中相撞的风险评估。同时该规程中将无人机按空机重量和起飞全重参数进行分类管理,主要针对中型无人机中风险较大的、大型无人机和超大型无人机中风险较小的三类无人机进行安全管理,批准实施部分试运行,为方便之后逐步建立标准和法规体系提供基础。中国无人机分类如表 2所示。
2018年11月19日,无人驾驶航空器空中交通管理信息服务系统(unmanned aircraft system traffic management information service system, UTMISS)在深圳地区正式进行试点运营[24]。该系统为民航局掌握民用无人机飞行活动,为民用无人机飞行提供空域、计划、安全评估等方面服务,实现与相关监管部门协同管理的信息化系统,是民用无人机运行管理的窗口。2019年,民航局颁布了《轻小型民用无人机飞行动态数据管理规定》,规定了所有从事轻、小型无人机及植保无人机飞行活动的单位、个人按要求接入UTMISS,实现实时报送飞行动态数据。UTMISS通过在无人机上加装单独的数据模块,并采用http协议的数据传输方式,从而获得无人机真实飞行动态数据,以此对空域中的无人机信息进行统一的管理。
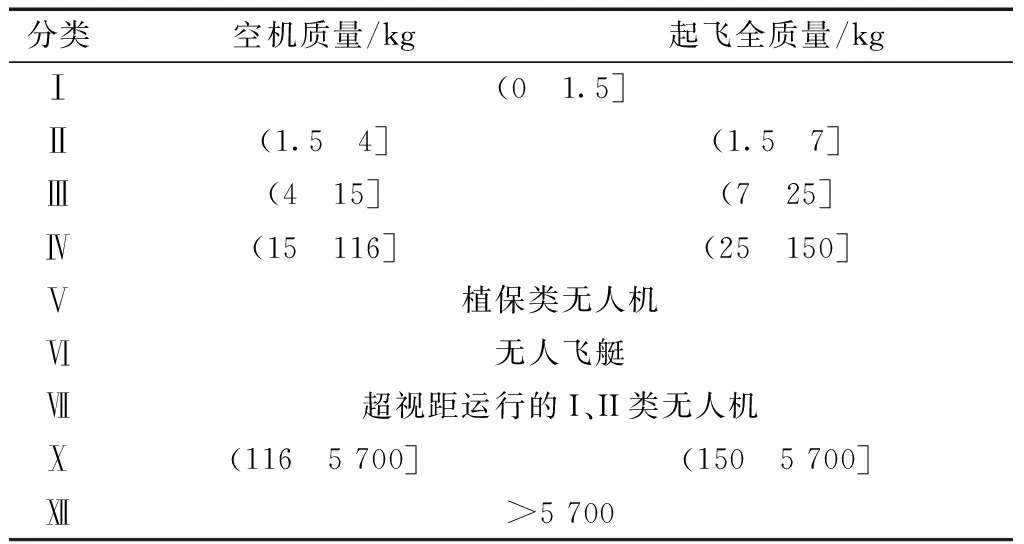
表2 中国无人机分类Table 2 Classification of UAV in China
UTMISS与《低空联网无人机安全飞行测试报告》以及《无人机云系统数据规范》的结合更加完善,这两部规章联合规定了民用无人机的在无人机云系统上的数据传输方法,传输要求以及其他各项能力要求,来规范民用无人机的实名管理。中国联网无人机管理流程如图 3所示。用户和无人机制造商以及政府管理部门通过电信运行商进行蜂窝联网,以无人机云系统为平台,实现无人机便捷实名登记、可信位置校验和实时可靠数据传输,并通过完善的一体化起飞授权、飞行监视和飞行管制等管理流程,以及加密认证技术来实现整体业务安全,以此达到事前预警、事中管控和事后追踪的监管要求。
2015年至今,中国发布了一系列法规条例以规范民用无人机的运行管理,中国民航局颁布的无人机管理法规体系如表 3所示。
尽管中国出台了一系列管理民用无人机的规章,但仍存在多数法规条例之间重复性较多,内容较为笼统,而且缺乏强制执行效力和可操作性的问题。且很多无人机操作者很少申请空域,“黑飞”现象仍然非常普遍。因此难以解决民用无人机可能造成如间谍行为、偷拍、运输毒品、抢占航线等安全问题。虽然中国已经开始建立民用无人机的飞行运营、适航管理、安全管理等的标准规范和法规体系,但研发制造、销售使用、流转情况等方面尚无明确的制度安排,导致整体产业发展略微畸形。
为更好管理整个民用无人机行业,相关部门应从如下五个方面进行改进:①建立统一高效的多部门、全行业联动协调监管机制,协同制订无人机产业发展顶层规划;②制定明确的无人机生产标准与适航标准,加强民用无人机驾驶员管理培训力度;③继续推进统一规范民用无人机的实名登记制度和销售流通备案登记制度,细化和统一民用无人机的申报使用流程,深化建设无人机监管信息云平台;④从研发、制造、销售、运营等多个角度进行全方位管理与全过程监管,明确无人机违法违规的行政、刑事责任,落实统一监管、统一追责;⑤在完善法规体系的基础上,加大力度研究无人机反制技术,通过技术手段和设备,对可能造成安全损害的无人机进行反制。
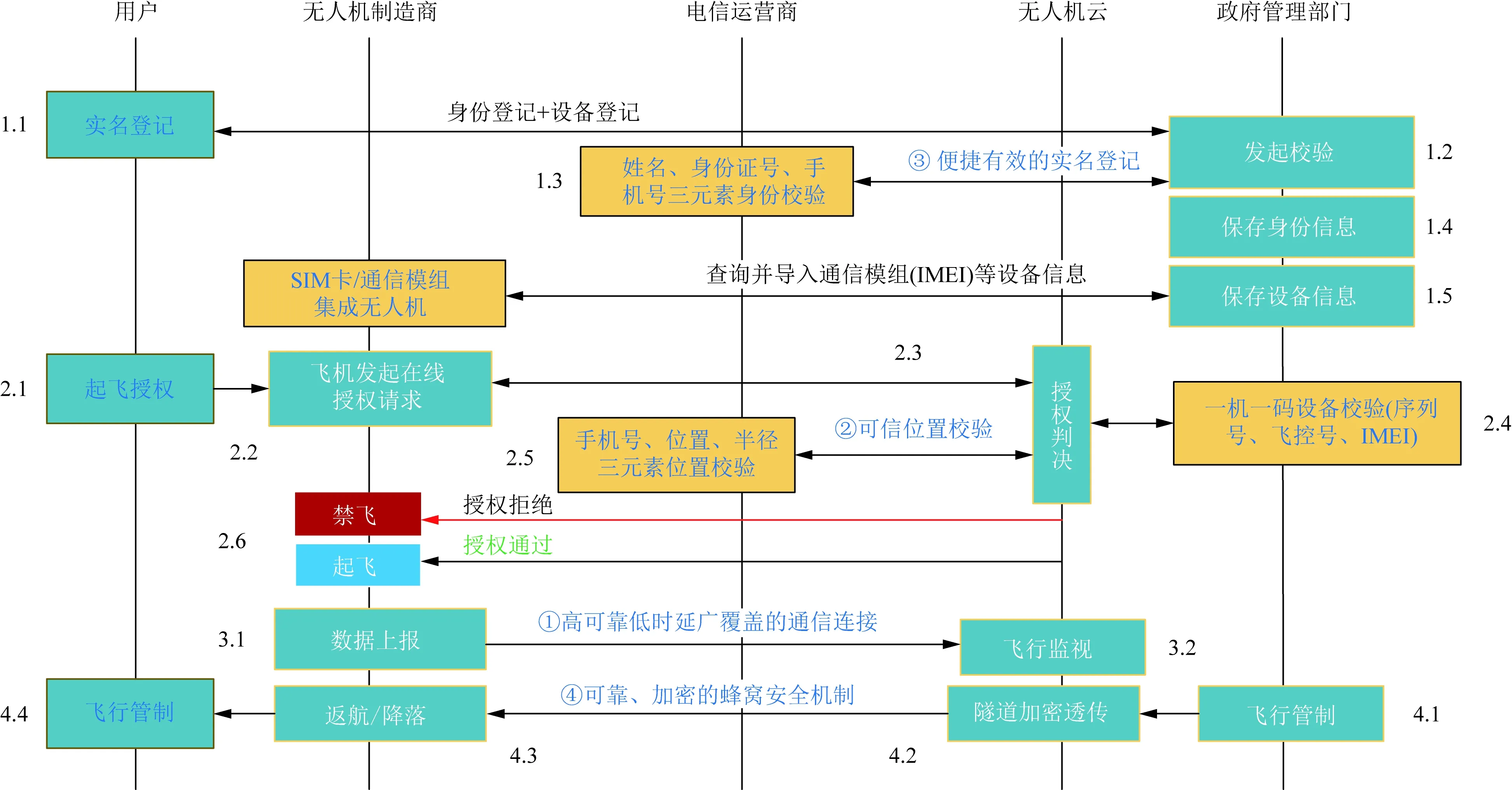
图3 中国联网无人机管理流程Fig.3 Management process of networked UAV in China
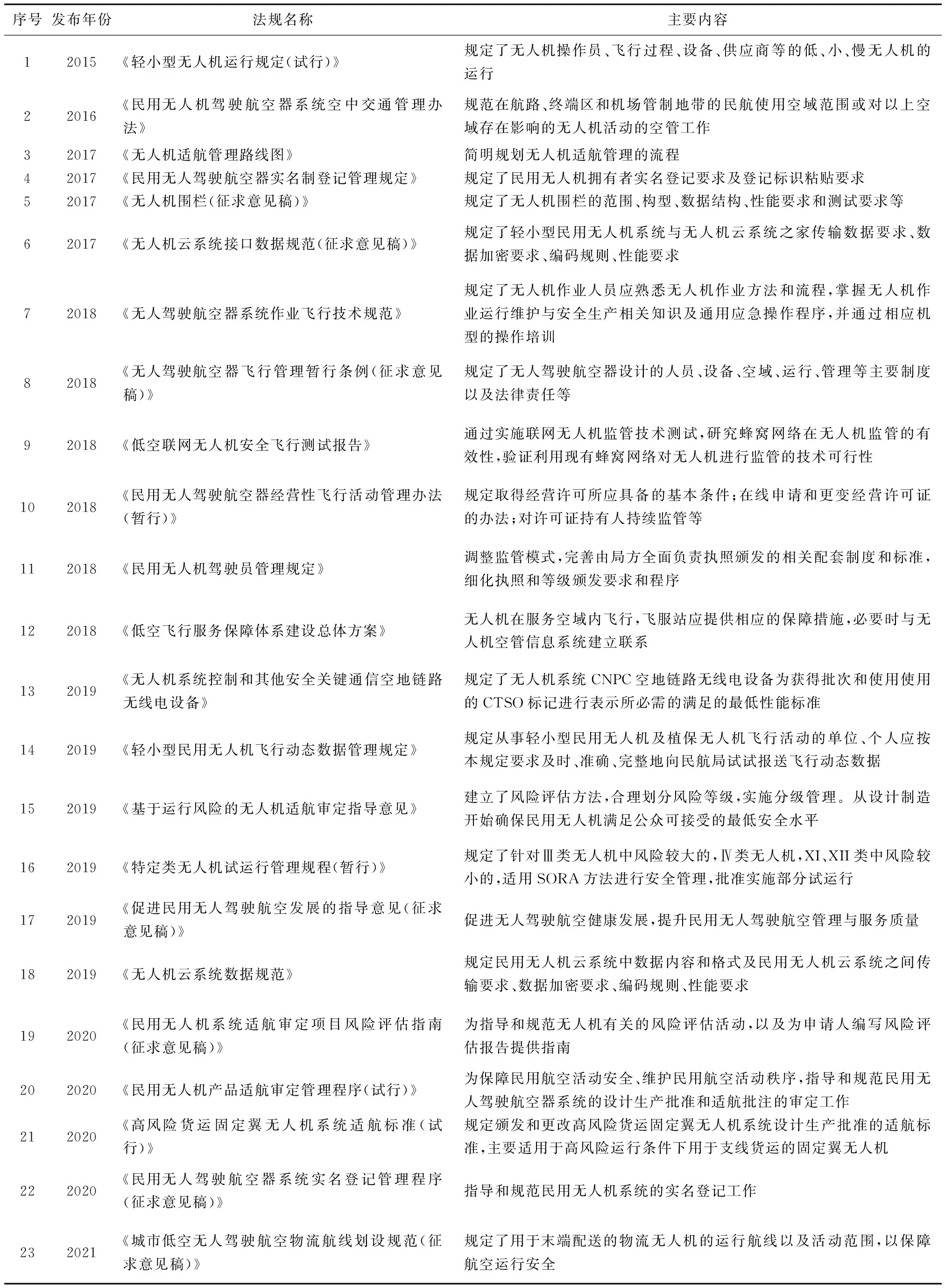
表3 民航局颁布民用无人机管理法规条例Table 3 Regulations of civil UAV issued by CAAC
1.2.2 国外民用无人机管理现状
目前世界各国普遍利用计算机技术、卫星定位技术以及无线数据传输技术搭建民用无人机的管理系统。各个国家虽然在术语和一些细节上的规定略有不同,但在系统基本架构和发展趋势上大体相同。下面将分别阐述美国、欧洲和日本的民用无人机管理方法。
(1)美国。为方便进行民用无人机管理,由美国国家航空航天局(National Aeronautics and Space Administration, NASA)牵头,与FAA等合作共同研制了一套无人机系统交通管理(unmanned aircraft system traffic management,UTM)框架,该系统授权给无人机服务提供商(unmanned aircraft system service supplier, USS),主要用于G类空域的管理,是一个面向服务的、非管制的空中交通管理生态系统[25]。FAA通过UTM来发布指令,监管和配置空域,空中交通管制员不需要管制空域中的每个无人机。UTM分为四个阶段目标进行推进升级,分别是:第一阶段的基于接口的网络化运行和信息资源的共享;第二阶段的超视距、飞行意图分享和地理围栏能力的基本实现;第三阶段的常态超视距运行,空中V2V防撞和规避静态障碍物;第四阶段的超视距运行到门,跟踪和定位,规避动态障碍和处理大规模突发事件[26]。
美国UTM从2019年1月开始试点运行的第一阶段到现在第二阶段基本实现。UTM在一定程度上方便了无人机的集中运行与管理,使得空域资源得到有效的利用。UTM技术发展的同时将推动新一轮产业的增长。同时UTM的设计也有一定的不便之处,在无人机的运行过程中仍需管制员对空域进行监视,对无人机进行管制和告警服务,仍然存在人员负担,同时增加了管制员的工作量。美国UTM框架如图 4所示。
(2)欧洲。鉴于无人机发展如此迅速的背景下,为加强民用无人机管理,保证无人机的安全运行,负责管理欧洲单一天空空中交通管理研究计划(single european sky air traffic management research program,SESAR)开发工作的SESAR联合执行体(SESAR joint undertaking,SJU)发布建立公共无人机飞行系统U-Space[27]。
U-Space是为了确保无人机安全、高效地在空域中运行,所设计的一套数字化和自动化服务系统。由于欧洲没有监管或技术框架来实现无人机安全运行,因此U-Space的目的在于推动新型航空方式安全、有效地发展。除了SJU执行牵头工作外,一些其他组织和国家也在开展有助于U-Space发展的重要项目。到2019年底,已经可以使用U1和部分U2的服务内容。其中U1包括无人机注册、识别等标准服务和静态地理围栏等技术,无人机的注册通过用户身份卡(subscriber identity module,SIM)等设备来完成,飞行授权通过使用全球移动通信系统(global system for mobile communications,GSM)来获得,同时可以通过检查地理数据库以查看无人机的可飞区域,即视距内飞行。U2则包括了公布无人机在U-Space系统中的飞行情况,通过手机应用程序或其他更便捷的方式进行访问,以此帮助无人机驾驶员制定更完善的飞行计划。U-Space系统可以储存用户和无人机的各项数据,同时将该数据传输给后台空域服务从而获得飞行授权。目前U-Space已经完成第一阶段的工程,后续三个阶段分别为:①提供初始服务,包括飞行计划、飞行动态追踪和与空管系统的交互;②提供扩展服务,包括冲突检测、自动检测和自主避障功能;③提供高度自动化、数字化的全功能服务[28]。
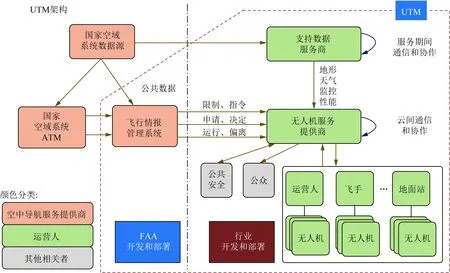
图4 UTM框架[25]Fig.4 Frame of UTM[25]
欧洲U-Space是一个系统性的、一系列的新的服务,通过利用特定程序的高度数字化和自动化,首先考虑了超低空空域的无人机运行,以确保大量无人机的运行环境安全,且保证对空域的功能进行有效的使用。U-Space对于发挥欧洲无人机领域的潜力、促进欧洲无人机市场的增长至关重要。但同时U-Space的设计考虑过于理想化,在复杂的空域中对无人机的运行管理方式仍需进一步考量。
(3)日本。日本无人机交通管理协会(Japan UTM)和新能源工业技术开发组织(New Energy and Industrial Technology Development Organization, NEDO)共同建立了日本国家UTM(UAV Traffic Management)项目。该项目包括飞行情报管理系统(flight information management system, FIMS)、无人机供应商、数据源供应商(source data service provider, SDSP)和运营商。其中飞行情报管理系统管理所有的无人机飞行计划,处理告警险情以及提供避障指令。无人机服务提供商在FIMS和每个供应商之间。日本UTM协会在2017年开始演示该系统。NEDO开发的个人用户系统在2018年进行演示,随后2019年进行全系统演示,并于2020年开始实施[29]。
各国无人机管理系统的研发均处于起步阶段,其中美国UTM的投入较早,走在世界各国的前列。相较中国空域资源紧张,所有空域都是管制空域,同时中国的通信网络由政府主导,由电信运营商提供移动网络通信。在这些差别的基础上,虽然中国的UTMISS和UTM提供的服务基本一致,但是在实现方式上应结合中国的空域现状和通信设备的特点等。因此,中国更适合在民用无人机的运行高峰区域规划设置运行路网管理,以保证无人机的有序飞行。而设置路网的前提是无人机路径规划技术如全局路径规划、自主避障等技术有一定的突破,足以保证无人机在路网中的运行安全。
2 民用无人机路径规划及研究进展
2.1 民用无人机路径规划简介
区别于航迹(track)指飞行器和船舶等航行时的轨迹,民航中的路径(route)是指不包括航行时间,飞行器在三维空间中的运动轨迹。路径规划(routing planning)是指在特定约束条件下,无人机从起始点到目标点,寻找满足某种性能指标和某些约束的运动路径[30]。这些路径需要满足能够保障无人机的航行安全,使无人机能够有效回避禁飞区域和危险区域,以经济、安全、高效为前提,在规定时间内完成指定的飞行任务[31]。
无人机的路径规划方法分为静态路径规划和动态路径规划。静态路径规划方法主要是指根据已知的地图信息和威胁因素,在三维空间中利用地形等各种信息,并考虑无人机的性能、耗损、任务时间等条件,综合规划最佳的从起点到终点的平滑曲线飞行路径[32-34]。动态路径规划方法是指无人机在飞行时面对突发的威胁可以进行实时的威胁分析,并重新修改预先规划的路径,使其重新满足能够完成任务目标的飞行路径。无人机动态路径规划也称自主避障分析[35-36]。无人机路径规划主要应用于多架无人机或者无人机群整体运行的情况,以静态规划为主,利用数字地图获取地理信息和已知的威胁源,结合无人机的飞行任务,通过飞行控制系统规划特定的起始点和终点之间的一条或多条平滑曲线;同时以动态规划为辅,实时监视无人机的运行环境,对各项突发动态威胁情况进行计算分析,得出新的飞行路径,以此保障无人机的安全经济高效运行[37]。其路径规划系统框图如图 5所示。
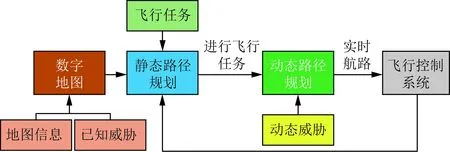
图5 无人机路径规划系统Fig.5 System of UAV path planning
在现代研究,路径规划的生成算法多种多样,有传统的经典计算方法如Dynapath算法、Dijkstra算法、人工势场法、退火算法等[38];也有利用智能计算方法的A*算法、遗传算法、蚁群算法和神经网络算法等[39]。每种算法得出的规划方式和结论各不相同,也各有优劣之处。不同路径规划算法的对比分析如表 4所示。
2.2 中外研究进展
自无人机出现以来,在对无人机进行路径规划时,如何对运行路径进行高效且安全的规划一直都是主要的技术难题。早期,军用侦查无人机进行路径规划的主要目的是为了在躲避敌方的火力及其他威胁的同时完成情报搜集、目标搜索和打击等一系列活动。随着无人机走向民用领域的同时,路径规划的目的变成了如何安全、经济、高效地完成航空作业。
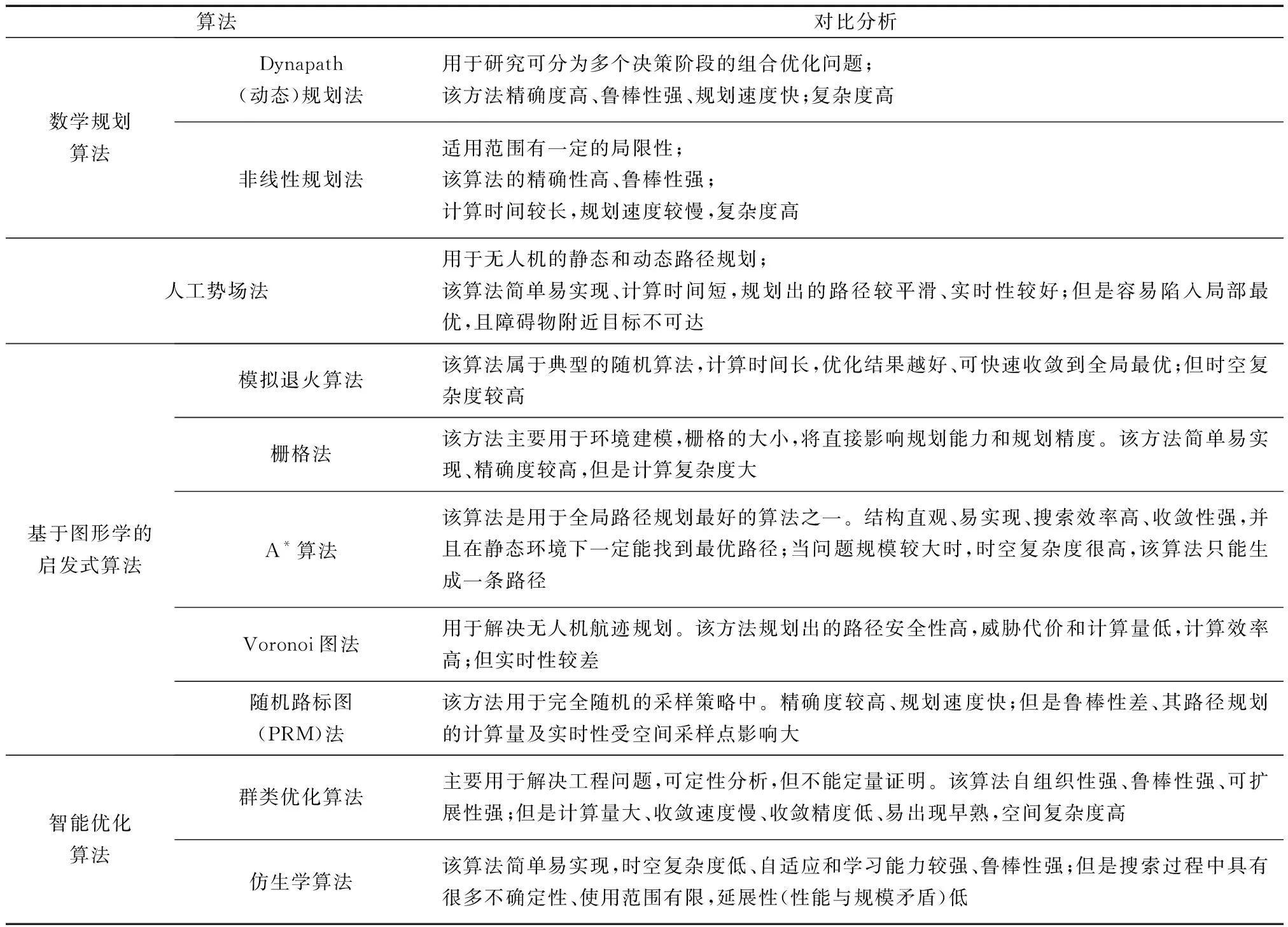
表4 路径规划算法优劣对比分析[32]Table 4 Analysis and comparison of path planning algorithm[32]
2.2.1 中国研究进展
中国对无人机的研究起步较晚,民用无人机的路径规划研究大多数在考虑不同的使用场景时只针对算法进行改进,并只通过仿真进行验证,在创新性以及实用性上仍有进步空间。柳长安等[40-43]、曾佳等[44]、廖沫等[45]和高晖等[46]院校学者针对无人机路径规划问题进行了多年的研究和积累,发表了大量的研究文献和相关专著。但是多数讨论的是根据无人机基于任务规划、多目标规划或协同路径规划等不同要求,结合数学规划方法和智能优化算法等不同方法的特点,或者将各种算法有针对性地优化,以此对单架无人机或无人机群进行路径规划。路径规划主要使用的智能优化算法包括遗传算法(genetic algorithm,GA)、 粒子群(particle swarm optimization,PSO)算法、人工蜂群(artificial bee colony,ABC)算法、A*算法、蚁群优化(ant colony optimization,ACO)算法[47],以及其他仿生学算法。现将中国已发表的现有研究成果基于上述部分算法分门别类进行总结分析。
(1)遗传算法(genetic algorithm,GA)。在遗传算法的研究上,贾秋玲等[48]提出将协同逆推控制(cooperative receding horizon control,CRH)与遗传算法结合,综合考虑了无人机机群的任务和任务区域特点进行求解,验证了算法的有效性。熊建国等[49]设计了一种自适应的遗传算法,通过将传统算法框架进行改进,重新设计了编码策略,用于解决遗传算法容易过早停止进化和收敛性不佳的问题,以此提升无人机的路径规划的精确度。在静态路径规划方面,屈耀红等[50]提出将人工势场法和遗传算法进行结合,以此对无人机的运行航路进行全局规划。该方法保留了人工势场法计算时间短的特点,且一定程度避免了GA陷入局部最优解的问题,提高了无人机路径规划的效率。黄书召等[51]同样将遗传算法进行优化,研究建立适合UAV的环境模型,设计更为复杂、精确的数学模型,利用多种不同算子寻找最优路径以及扩大遗传算法种群搜索范围。该方法计算效率比传统遗传算法提升了50%以上,使得无人机在面对突发的威胁情况时反应更加灵敏,同时进行路径规划的精确度更高。
(2)粒子群(particle swarm optimization,PSO)算法。PSO和GA类似,是一种基于迭代的优化算法。系统初始化为一组随机解,通过迭代搜寻最优值。同遗传算法相比,PSO的优势在于简单容易实现,并且没有许多参数需要调整。但是PSO对于离散的优化问题处理不佳,也容易陷入局部最优,因此关于PSO的研究都是如何避免这些问题。王磊等[52]提出一种基于改进粒子群算法的无人机路径规划方法。从单个粒子着手改进,如果粒子失活,该算法会对其进行相应的变异与微调,重新激活粒子,保证了粒子群在进化过程中能快速逃逸局部极值点,避免了PSO后期容易陷入局部最优的缺点。但该方法着重考虑的是如何改进PSO,在建模验证阶段对无人机的威胁源设计过于简单,因此适用性上存在缺陷。PSO同样可以运用于多无人机的路径规划上。朱收涛等[53]采用了提出空间直接法,针对多无人机的协同路径规划进行设计,然后采用改进的PSO进行仿真验证,可以达到收敛性较好的结果。但该方法将无人机运行空间划分为不同高度层,把每一个高度层当成二维平面进行计算,这在一定程度上简化了计算的过程,但也对无人机的实际运行环境过于理想化,使得准确度有所欠缺。胡腾等[54]则提出将无人机群的不同任务目标进行优化指标加权联合, 构成路径优化过程中评估生成路径的多目标效用函数, 然后采用PSO求解最佳的三维路径。付兴武等[55]针对PSO早期收敛速度快,后期陷入局部最优的缺点,提出一种结合天牛须搜索(beetle antennae search, BAS)的优化PSO,结果证明改进PSO在无人机路径规划的标志性效率更高,比传统粒子群算法有着更好的收敛性,同时避免了陷入局部最优,有效缩短了路径长度。该方法充分利用了PSO的收敛速度快的优点,并加入BAS算法解决了PSO搜索精度差的缺陷,在威胁区域的建模上也一定程度避免了无人机陷入“死区”的情况,有着较好的适配性。
(3)蚁群(ant colony,AC)算法。蚁群算法与GA和PSO不同,启发式的概率搜索方式不容易陷入局部最优,很容易找到全局最优解,且具有较强的鲁棒性、优良的分布式计算机制、易于与其他方法相结合等优点。同时虽然选择能探索更大的任务空间,但是需要较长的时间才能得到正反馈,因此蚁群算法的收敛速度相对较慢。中国学者运用AC进行路径规划的研究上也有着不少的成果。柳长安等[40-43]多次采用AC并不断优化,使得无人机在任务完成效率以及成功率上不断提升。任波等[56]提出一种Q-learning的自适应蚁群算法。通过采用数学方法简化初始路径规划结构, 解决了由于引入真实地形和已知威胁时带来的“维数爆炸”现象,减轻了无人机飞控系统处理数据的负担;同时算法中对信息素因子作了自适应调整,提高了AC的全局搜索能力和收敛速度,提升无人机的任务完成效率。该简化方法有一定的可取之处,但仍需对简化精度进行提升。税薇等[57]提出了将AC用于静态路径规划,人工势场法用于动态路径规划,利用AC容易找到全局最优解且易于与其他方法结合的特点,也兼顾了人工势场法计算速度快, 适合处理动态威胁信息的优势。该方法在设计上是较为全面的无人机路径规划方法,后期可以增加约束条件与算子,使其适用于三维路径规划,以贴近无人机的实际运行过程。
(4)A*算法。A*算法是一种求静态路网中求解最短路径最有效的直接搜索方法,有着存在多个最小值时不能保证搜索的路径最优的缺点。肖自兵等[58]提出了一种改进 A*定长路径搜索算法。该算法通过选择代价值最接近给定值的节点作为最佳节点,得到定长规划路径, 并以此为基础不断迭代,实现了多机协同路径规划。该方法中定长的选取会直接影响总体路径规划的速度和精度,同时对多无人机进行路径规划时是单机依次规划,因此更加影响总体的规划速度。谭雁英等[59]提出一种采用基于A*算法的两步寻优路径搜索策略,用于无人机在面对可能突然出现的危险/威胁区域的间距较小,或重叠复杂环境下,或任务变更时的动态路径规划。该方法牺牲了算法求解速度,以提升精度,但容易造成无人机悬停或其他不可预知的危险。陈朋等[60]提出了一种基于关键航点的实时无人机航迹规划方法。通过改进A*算法的启发函数以适应无人机的三维运动特征,并优化碰撞代价函数和无人机动力约束。先筛选出关键航路点生成初始路径,后构建二次规划模型来优化初始路径,使求解的路径结果精度提升。虽然牺牲了一定的计算速度,但是在三维城市模型的路径规划仿真中表现优异,后续仍需将无人机本身的尺寸参数进行改进约束,而不是当成一个点进行计算。
(5)其他仿生学算法。仿生学算法是一类模拟自然生物进化或者群体社会行为的随机搜索方法的统称。由于这些算法求解时不依赖于梯度信息,故其应用范围较广,特别适用于传统方法难以解决的大规模复杂优化问题。除了上述几种算法外,还有学者运用其他仿生学算法进行无人机路径规划的研究,并发表了许多成果。张国印等[61]提出了一种果蝇优化算法,该方法模拟果蝇会自动寻找糖分的特点进行最短路或最优路径寻找,优点在于可以自行搜索轨迹并自动迭代,可适用于无人机自动避障后的路径重规划。但该算法需要人为设定迭代次数,在参数选择上会影响算法的精确度。夏瑞等[62]提出一种改进的人工蜂群算法,用于有相同的起始点和目标点的路径规划问题。通过对人工蜂群算法中食物的产生方式做出改进, 优化下一个节点的产生结果。在方法在进行多无人机协同路径规划时,算法简单快速, 能满足无人机执行不同任务的需要, 易于工程实现。
除了上述几种算法外,中国诸多学者还持续研究如改进的快速扩展随机树(rapidly-exploring random tree, RRT)算法[63]、飞蛾扑火算法[64]和灰狼优化算法[65]等一系列新兴的无人机的路径规划算法。中国在民用无人机算法的研究上,从一开始的“纸上谈兵”式的单纯进行路径规划算法设计,到如今开始分别针对城市安全[66]、植保[67]、消防[68]等不同使用情况的针对性设计。虽然在算法精度以及计算效率设计上仍有不足,且不经济,但是这种“对症下药”式的研究更符合当前中国民用无人机的应用情况,同时也能更加促进无人机路径规划研究的进步。
2.2.2 国外研究进展
在欧美等发达国家的通用航空研究起步相对中国更早,针对民用无人机的路径规划研究也取得了显著的成果。早在1998年,Mondoloni等[69]就开始了最优飞行路径的研究。随后在2000年,Bortoff[70]提出了一种基于Voronoi图进行无人机航路规划的两步法。第一步是通过利用雷达搜索生成基于Voronoi多边形的图形,并构建大致的次优路径;第二步是在路径图解的基础上,对该图解模拟出非线性的常微分方程,以此进行仿真从而得出稳定的路径最优解。这是最早将Voronoi图进行改进并用于无人机路径规划算法的研究,Voronoi图法由于有着较高的安全性和计算效率,以及较差的实时性,在已知威胁的静态路径规划中有着较好的利用。同样是静态路径规划,Asseo[71]提出将最小下降梯度法(steepest descent, SD),也称最速下降法,应用于求解地形追踪(terrain following, TF)和地形规避(terrain following, TA)方面。研究证明了最速下降法收敛速度快,对地形的要求不高,由于该算法建立在目标函数梯度的基础上,虽然仅要求一阶偏导连续,但同时也要求导函数连续,且计算量大,很容易陷入局部最优。此外,由于过于简化威胁条件,将威胁因素叠加在地形上,因此难以反映地形对威胁的遮蔽效果,使得威胁附近目标不可达。由于无人机运动时是在一个三维空间内,因此需要对无人机的运行进行三维路径规划。Ioannis等[72]采用进化算法来求解三维路径规划问题,虽然得到的路径较为精确,但是存在耗时较长的问题。Zhang等[73]提出采用混合差分的进化算法(hybrid differential evolution algorithm,HDE)进行三维无人机路径规划,这里不但综合优化了算法的计算速度,且采用二次B样条曲线对所得路径进行平滑处理,使得求解质量和约束处理能力都有着较好的表现。在最新的研究中,Xin等[74]提出将Balwin教学(Balwin-teaching-learning)与人工雨滴算法(artificial raindrop algorithm,ARA)结合的全局路径规划算法。该方法综合优化了人工雨滴算法中在演化后期由于收敛速度较高而求解范围较小,从而陷入局部最优的情况。ARA框架的引入确保了该算法对最优路径搜索的更好控制,同时利用教学优化算法加快了ARA的收敛速度,所得到的结果比单一教学优化算法、人工雨滴算法和灰狼优化算法等更加平滑、路径更短,同时所得结果更加稳定。但由于BTL-ARA算法的研究还在起步阶段,仍有许多问题需在进一步研究中进行解决。
除了在已知威胁的静态环境下进行路径规划之外,在不确定环境下进行无人机动态路径规划或自主避障也是研究的重难点。早前Doebbler等[75]和Yang等[76]分别研究了无人机如何有效自主躲避地形障碍的动态路径规划,所得的成果可以实现自动回避地形,且时效性较强,但也只是考虑了地形的规避方案,并没有考虑其他可能的威胁源。Liu等[77]提出将人工势场法扩展到三维空间中,同时结合李亚普诺夫稳定性以避免在求解过程中陷入局部最优,且能保证实时性。该方法将地形在内的各种威胁源进行一体化处理,但是该算法本身会导致避障效果不能保证全局最优性。Julian等[78]提出采用深度神经网络压缩(convolutional neural networks,CNN)来优化无人机自主避障策略中的离散数值表,利用非对称损失函数和梯度下降算法对离散数值表进行逼近处理,从而得到一个近似表格,但是该算法过于依赖原始表格。由于使用了集中方式控制无人机的实时路径规划,所以只能用于合作式自主避障。当出现飞行器入侵或者其他动态威胁源时,无人机的避障性能大打折扣。
单架无人机采用先进控制策略可实现实时的高精度姿态控制,完成轨迹追踪,但是多无人机编队飞行执行任务的成功率和抗突发事件的能力要比单架飞机高,因此多数时候会将多架无人机进行协同编队执行任务[79]。在无人机多机协同路径规划方面,Wolef等[80]进行了深入的研究,但由于编队飞行在编队控制量的作用下是强耦合的,基本上是将多架无人机编队看作单架无人机进行研究,没有过多考虑无人机群中的协同作用。Shanmugavel等[81]将协同路径规划分为三个部分。第一部分利用带回旋曲线的Dubins路径确定每架无人机的可飞路径;第二层设置保持飞行最小间隔,并设计多路径交叉点处的路径长度大于或等于该设定间隔,从而实现防止无人机之间发生碰撞,同时设置中间点,以便绕过障碍物;第三部分使无人机路径长度趋于相等,以此实现时空协同。该算法是较为合理且全面的多无人机协同路径规划方法。Liu等[82]提出使用离散的人工蚁群算法,综合运用交叉算子、逆转算子和免疫算子,实现了路径的编码组合。该算法简单易实现且时空复杂度低,但并未考虑到无人机编队时的多目标优化问题,因此有待改善。目前多无人机编队飞行仍然是无人机的关键技术难题之一,中外许多学者还在为突破该难关不懈努力。
相较于中国单一对路径规划算法进行设计,国外团队对无人机在路径的详细运行设计上研究更加深入。在进行算法设计时,不单单考虑路径上的障碍和已知威胁情况进行静态规划,还加入了无人机自身尺寸的约束,让无人机可到达的区域更加广泛;同时还考虑了无人机自身的性能条件,使得在研究实验中无人机的自主避障功能更加灵敏,更加出色。甚至有国外团队开始研究机器学习原理来设计算法,并且在无人机竞速实验中,该算法规划的路径甚至优于专家级无人机驾驶员[83]。
3 民用无人机发展趋势
目前可以预知的是,民用无人机的下一个应用场景便是NASA提出的先进空中交通 (AAM) 系统,包括了空客(Airbus)公司等提出的城市空中交通(UAM)系统。NASA认为无人机的服务区域除了城市之外,还有郊区和农村,甚至可以扩展到地区以及洲际服务。其中首先提出来的UAM是一种安全和高效的城市空中交通系统,也是目前各国的重点发展对象。中国在UAM的跟进上,以京东为代表的电商企业等在2015年之前都开始布局无人机末端配送服务。目前京东已经在陕西、四川等省面向乡村偏远地区开展无人机末端配送常态化运行;也有像迅蚁这样的初创企业在探究大型城市小件物流“闪送”的应用可能性[84]。UAM作为一个新型概念,中国对应的研究量较少,深度也不足,当前大多数UAM文献探究的是XI类无人机进行载人运输的相关研究。NASA对UAM的规划里,以2030年为节点,末端配送和空中巴士两个场景都可实现。
目前中国无人机航拍、无人机竞速、空中表演等无人机应用技术已经成熟,同时专业类无人机技术渐趋成熟,无人机在基础设施巡检、末端物流配送、城市消防等应用功能趋于综合性及复杂性。设计一款能适用于实际情况的路径规划算法,在提升民用无人机作业效率的同时,也能方便对无人机进行宏观管控和细化管理。目前中国在无人机路径规划的算法研究主要呈现以下几个趋势:①大多数路径规划算法主要集中在各种启发式算法以及他们的改进优化形式,而且绝大部分研究都只存在于理论和仿真阶段,并不能接近真实的无人机运行情况;②与国际上相比,目前中国民用无人机的路径规划算法大多在军用无人机的研究上进行改进,使用场景不同的情况下,算法的适用性也会不尽相同;③算法的精细化程度不断提高,得益于许多前人的研究以及计算机技术的发展,学者们在设计算法时可以更加精确地设置约束条件以模拟无人机的真实运行情况。但是无人机的实际运行环境十分复杂,尤其在突发威胁源出现时的自主避障算法需要着重考量,以填补当前研究的不足。
考虑到现有无人机路径规划冗余度高和精确度差,因此急需设计一种适用于复杂环境的无人机路径规划算法。因使用环境的差异会造成算法适用性的误差,为减少该误差所带来的巡航性能损失和经济效益减少,应主要从以下四个方面进行努力突破:①借鉴国外先进的启发式算法外的路径规划方法,结合目前中国无人机实际运行情况,进行航路规划的设计;②目前中国静态和动态航路规划的算法都比较独立,没有一套适用静动态规划结合的算法,应多利用各种算法的研究经验,进行结合分析,从而设计出一套适用于静动态规划结合的路径规划方法;③应结合无人机的不同应用领域或不同任务目标进行详细的算法设计,以满足无人机在不同作业场景的运行情况;④在UAM布局的大背景下,受限于无人机的技术水平,应更多地对无人机的路径路网进行总体规划设计,而不是单一的对单架或者多架无人机的路径进行规划设计。
从整体上看,中国的空域结构相对国外更加复杂,运营管理相对更加严格。同时中国的无人机构成主要以轻小型为主,中大型无人机占比较少,对此可以固定中大型无人机的运行路径,也就是针对中大型无人机设计固定的运行航路,以减缓空域的运行压力。另外中国东部空域繁忙、流量庞大,民用无人机的运行难以进行,因此可以对不同区域进行针对性设计低空无人机的路径路网,以规范管理,保证无人机运行安全。
4 总结
传统航空器是以瓦特蒸汽机为代表的动力技术平台的集大成者,现代无人机则是以图灵计算机为代表的算力技术平台上开发出来的新一代航空应用。无人机的优势不在于有人驾驶还是无人驾驶,而是航空业能否从算力技术的指数式发展中得到充分收益。目前UAM的研究推进以及国外通用航空中无人机的应用多样化,未来无人机的研究探寻必将呈现出遍地开花的势态。在无人机最基础的路径规划布局上,中国学者应更多结合目前无人机的技术发展情况,并随着中国的低空空域开放进程来对无人机的路径规划进行系统且合理的设计。中国作为民航业大国,在成为民航强国的路上,对民用无人机的各项研究仍需继续推进,并取得突破。
猜你喜欢
华人时刊(2022年13期)2022-10-27
军民两用技术与产品(2022年4期)2022-06-28
科学家(2022年3期)2022-04-11
建材发展导向(2022年2期)2022-03-08
小学生学习指导(低年级)(2021年12期)2021-12-31
房地产导刊(2021年6期)2021-07-22
当代陕西(2019年21期)2019-12-09
阅读与作文(英语初中版)(2019年8期)2019-08-27
领导决策信息(2018年16期)2018-09-27
领导决策信息(2018年50期)2018-02-22