
基于连杆机构的手指外骨骼设计
2022-07-28 06:57廖斌黄运铪邹翔李国翚
科学技术与工程 2022年17期
廖斌, 黄运铪, 邹翔, 李国翚
(1.天津大学机械工程学院, 天津 300350; 2.桂林电子科技大学机电工程学院, 桂林 541004; 3.天津开发区奥金高新技术有限公司, 天津 300072)
手功能损伤以及上肢部分功能损伤在脑卒中和脑外伤幸存者中较为常见。目前传统的康复治疗主要依靠医疗康复师进行,治疗效果受到康复师经验、精力等的因素影响,治疗效率较低。为了提高康复治疗的效率,弥补康复师人员不足的缺陷,降低康复师的工作强度,相应的康复治疗装备也应运而生。外骨骼属于可穿戴型装备,可用于肢体的康复治疗。利用外骨骼进行康复训练已逐渐成为康复训练的主流[1-2]。外骨骼机器人的研究正朝着轻量化、智能化的方向发展。手部外骨骼通过固定在患者手上带动手指做屈伸运动等康复训练。在康复训练过程中,外骨骼的轻便性、舒适性和安全性显得尤为重要[3]。手指外骨骼是手部外骨骼的基础组成模块,也是实现功能的主要模块,所以手指外骨骼设计的优劣直接影响着手部外骨骼功能的实现。
外骨骼的特点是用夹板或仿生结构包裹住肢体,各关节需要驱动力矩带动肢体运动[4-5]。手部外骨骼的通常主要通过连杆机构驱动或者线缆驱动实现。连杆机构常用于表面接触连接,其优点是制造相对简单,容易获得较高的制造精度,同时连杆曲线丰富,可满足不同运动的需求。目前出现的连杆机构的形式有串联机构[6-7]。平行四边形机构[8]、多连杆复杂机构[9]等。多数连杆机构中的连杆长度固定,这样对于不同的佩戴者容易造成手指关节与外骨骼脱位的现象[10]。线缆驱动模拟人体手部肌腱的驱动方式,通常线缆驱动外骨骼结构较连杆机构外骨骼简单,有助于减轻手部的负重。除了直接驱动手指外骨骼的关节[11],线缆可与齿轮机构组合完成手指关节的屈伸[12-13],也能够驱动无关节手指外骨骼[14],以及刚柔耦合机构的手部外骨骼[15]。但是线缆存在明显的弹性变形,控制方法较为复杂,在实际运动过程中需要补偿由弹性变形引起的关节旋转偏差。
手部外骨骼通常都是由手指外骨骼组成。现首先设计好手指外骨骼,为今后设计手部外骨骼奠定基础。连杆机构驱动方式直接,便于控制,选择以连杆驱动方式来设计手指外骨骼。设计过程中除了需要解决好手指外骨骼的运动自由度问题之外,手指外骨骼的广泛适用性和舒适性也是需要着重考虑的问题。
1 手指外骨骼运动分析与结构设计
1.1 人体手指的结构及弯曲的运动规律分析
人体的手部结构由许多肌肉、关节组合而成,具有很复杂的机械结构,当进行抓握动作时,手部会结合大脑的感知来完成,除此之外,手还能用来表达情感。可见手部的功能异常会带来极大的不便,当给手指功能有障碍的患者设计康复外骨骼来辅助治疗时,提高外骨骼与手指运动轨迹的契合度,以及对手指进行弯曲及伸直运动时的规律进行分析是很有必要的一步。
1.1.1 人体手部结构机理分析

图1 手部骨骼示意图Fig.1 Hand bones
图1为手部骨骼示意图,当手指进行弯曲和伸直时,远端指间关节(distal interphalangeal point,DIP)和近端指间关节(proximal interphalangeal point,PIP)关节均只有1个自由度。掌指关节(metacarpophalangeal point,MP)比指间关节多1个自由度。可知,人体的手掌部分由19块骨骼以及14个活动关节组成,各自有着独立的排布,共同协作完成着复杂的动作。基于本设计的目的,着重分析单个手指3个关节DIP、PIP和MP的运动方式。
1.1.2 手指极限弯曲角度分析
人体解剖学指出,手指指节骨块之间的联系由韧带完成,韧带除了可以连接骨骼,还能对手指的静态极限位置进行限制,约束手指指节骨骼间的关节转动角度。而肌腱的功能是将肌肉产生的力传导到骨骼使之进行运动,形成对骨骼的动态限制。在韧带与肌腱的协作下,关节得到了完善的限制,由图2可知,MP与DIP关节极限屈曲角度约为90°,PIP关节的极限屈曲角度约为100°。
由于外骨骼属于穿戴设备,所以需考虑外骨骼与手指的相对固定方式。考虑选用魔术贴的形式使外骨骼与手指进行固定,既方便拆装,且材质柔软,对人体皮肤不会产生伤害,使得用户使用感受良好。如图3所示,当手指弯曲时,由于魔术贴在手指弯曲前已经紧贴手指,弯曲后肌肉的收缩导致该指节的横截面积增大,对手部产生压迫,所以佩戴前后手指的各个指节的极限弯曲角度并不相同。通过收集佩带魔术贴后手指的极限弯曲角度数据,可知MP的极限角度约为45°,PIP约为90°,DIP约为45°。
1.1.3 手指自由度分析及确定
为了方便设计以及便于进行运动分析,对手指的结构进行适当的简化。除了拇指之外,其余4根手指均是由3个指节骨骼组成,其中又包含了两个指间关节DIP与PIP和一个掌指关节MP,掌指关节负责将手指与掌骨相连接。两个指间关节均是只有1个自由度,经过简化可用1个铰链结构来代替。而掌指关节不但可以实现伸直与屈曲,还能实现外展和内收,具有两个自由度。但是外展和内收的动作对于手指的弯曲来说并不是日常动作中作为主要的运动,并且手指做外展和内收动作时,关节的摆动幅度仅在±10°之内。手指康复训练时忽略掌指外展和内收运动,只考虑主要的伸曲运动,进而化简为单自由度关节。最后将指节骨骼简化为连杆机构,连杆的长度为手指实际的指节长度,掌指骨骼作为机架。如图4所示,该手指简化结构具有3个自由度。
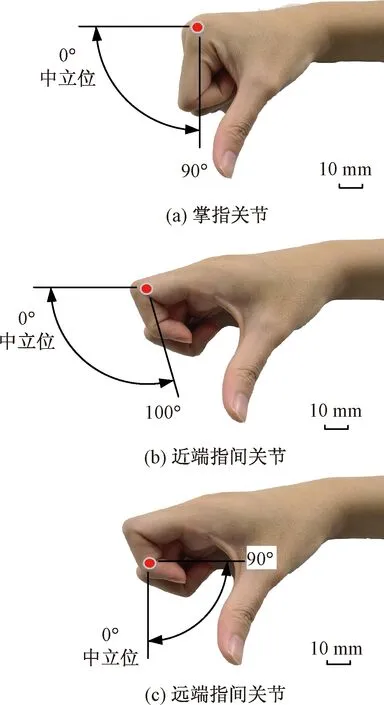
图2 手指3个关节极限屈曲运动示意图Fig.2 The extreme bending motions of three finger joints

图3 手指佩戴魔术贴弯曲情景图Fig.3 Finger bending with a velcro
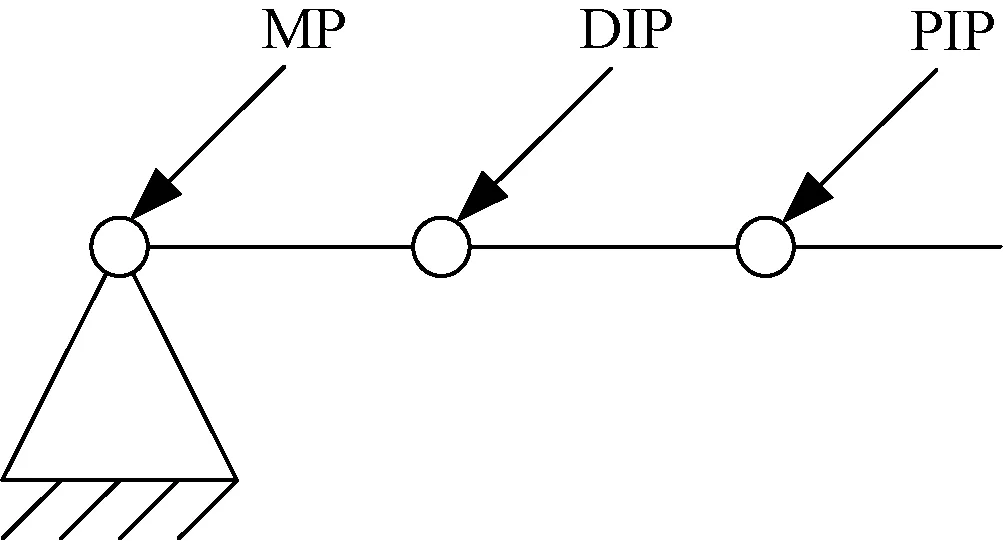
图4 手指简化结构Fig.4 The simplified structure of a finger
1.2 手指外骨骼运动分析
该手指外骨骼仅针对手指的弯曲与伸直这两个动作,不考虑掌指端MP的外展与内收时的运动状态。对近掌指节来说,其进行弯曲动作是围绕MP关节做旋转运动,类似一个铰链结构,而该指节可以看作一根摇杆。将从四杆机构出发对外骨骼进行设计,若机构中存在摇杆,根据机架的选择与杆长的变化可组成的两种结构:曲柄摇杆机构、双摇杆机构。由于每个手指关节可弯曲的角度均是存在限制的,需要对摇杆的摆动角度控制较为精准才能满足设计需要。
由于曲柄摇杆机构需要原动件一直循环整转才能使摇杆不断重复来回摆动,此时摇杆结构的角度控制难度较大。而双摇杆机构中作为原动件输出件的摇杆的运动状态和被动摇杆的运动状态是一一对应的,对原动件的旋转角度进行控制则很容易对另一摇杆进行精准控制。于是考虑通过使用双摇杆机构去实现手指外骨骼弯曲功能,设计简图如图5所示。若仅考虑外骨骼能自行弯曲,此时该外骨骼也具有3个自由度。

1、2、3为主动摇杆;4、5、6为被动摇杆;7、8、9为带铰链的滑块图5 3个自由度机构简图Fig.5 The diagram of a 3-DoF mechanism
杆件1、2、3安装在驱动件上,当最左侧外骨骼机架上的原动件顺时针转动,1杆件均随着驱动件的转动而摆动,同时1杆在7滑块上产生滑动,因此4杆件受到向下的压力从而实现弯曲。而4杆件又作为下一外骨骼关节的机架,重复最左侧外骨骼关节的动作,2杆受原动件驱动后摆动,5杆也因受到压力而进行弯曲运动。最后一个关节与前两个关节同理完成运动。根据上述运动机制,只有每个外骨骼关节的运动又相对独立,均由各自关节上的原动件决定运动状态,不受各自影响,但各个关节又能有机地联结起来。
通过结构简图可知,除了机架之外,共有n=9个运动构件,其中又包含了9个转动副和3个移动副均属于低副。自由度计算公式为
F=3n-2PL-PH
(1)
式(1)中:F为自由度;PL为低副;PH为高副;最终计算得到F=3,与所分析的结果相同。
1.3 手指外骨骼结构设计方案
众所周知,每个人的手指尺寸会有很大差异,并且同一手掌上的五指也是形态各异,对所设计的手指外骨骼既然想满足各类人群的使用就需要考虑到外骨骼各节的长度可调的问题。并且同一根手指在伸直与弯曲状态下肌肉的拉伸与压缩状态也会导致测量尺寸的改变。如图6所示,当手指伸直时外侧和内侧的长度是大致相等的。如图7所示,当手指弯曲时,外侧与内侧的长度差距明显,外侧肌肉被拉伸,内侧肌肉被压缩。同理可知,当戴上手指康复外骨骼时,手指伸直与弯曲时所需外骨骼的总体长度也会略微发生变化。此时如果外骨骼的整体长度固定会给手指带来不舒适感。

图6 手指伸直示意图Fig.6 A straight finger

图7 手指弯曲示意图Fig.7 A bent finger
所设计的机构需增加可变化外骨骼指节长度的结构才能够满足设计要求。图8所示为优化后的机构简图。该外骨骼机器人具有3对可以在外骨骼关节内滑动的铰链,同一个外骨骼关节内有两个滑孔,分别位于上下两侧,可以避免相邻关节间的铰链发生干涉运动影响外骨骼的正常工作。伴随着外骨骼各个关节间的间距变化,可滑动铰链根据实际情况在外骨骼的滑孔内自由伸缩。当杆1受原动件驱动后向顺时针方向摆动,带铰链的滑块4受到向下的分力,使手指与外骨骼结合构件13向下弯曲,此时外骨骼间的铰链关节因手指弯曲时的变化特点而进行滑动,使得外骨骼间的距离变大,从而实现了近掌指节的弯曲运动。当弯曲运动完毕后,原动件开始逆时针带动杆1,将构件13向上提起,实现返回手指伸直功能。

1、2、3为主动摆动滑杆;4、5、6为铰链滑块;7、8、10、12为连杆;9、11为被动摆动滑杆;13、14、15为3个单节手指外骨骼与手指固定的结构图8 具有3个自由度的手指外骨骼机构简图Fig.8 The diagram of a 3-DoF finger exoskeleton mechanism
由图8可知,一共有15个活动构件,其中将手指结构中的铰链一并算上即转动副有12个,移动副共有9个,根据自由度计算公式[式(1)]计算得到自由度为3,又结合该机构简图的运动分析可知该方案合理。
2 手指外骨骼机械结构设计
2.1 舵机输出传动方式原理与分析
由于主动杆不需要整周旋转,并考虑到尽量简化传动结构,减轻手指负载,故考虑采用舵机进行驱动。当舵机顺时针转动一定角度后,摆杆受到舵机的驱动力顺时针下摆,从而将力传导到外骨骼指节使其进行弯曲。根据此思路设计如图9所示的结构。其中掌背舵机固定架与掌背固定架为两个零件装配为一体,不可相对运动。装配体通过魔术贴布带固定在手背,作为不可移动的机架。舵机安装在掌背舵机固定架上,使用螺钉在侧面固定。舵机转子与外骨骼摆杆固定,当舵机顺/逆时针转动相应角度时,外骨骼摆杆也会跟随舵机转子一起转动。外骨骼指节侧面设计有圆柱状小悬臂,与外骨骼摆杆的槽口内切,当外骨骼摆杆顺/逆时针转动,该圆柱状小悬臂将会受到与切面垂直的压力,带动外骨骼指节向下弯曲。手指固定环与魔术贴组合固定指节,铰链用于连接零件。
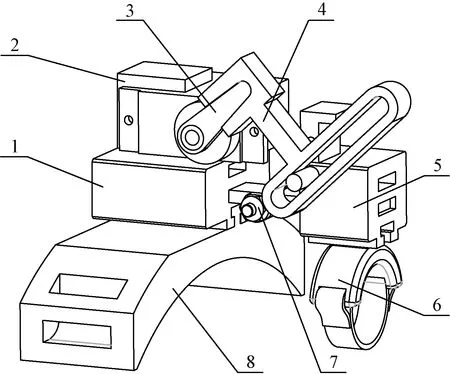
1为掌背舵机固定架;2为舵机;3为舵机转子;4为外骨骼摆杆;5为外骨骼指节;6为手指固定环;7为铰链;8为掌背固定架图9 传动结构图Fig.9 Transmission structure diagram
外骨骼摆杆为传动过程中的核心部件,起到将舵机的机械能转换成为外骨骼指节动能的作用。如图10所示,外骨骼摆杆受到以舵机转轴为中心的扭矩M,受到外骨骼指节侧面圆柱状悬臂梁的支持力F,该力的方向垂直于两构件接触的切线方向。此时该支持力F相对于舵机转轴圆心距离d为10 mm。假设其中M=0.02 N·m。
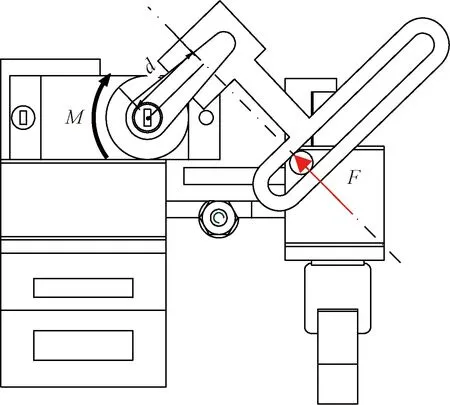
图10 外骨骼摆杆受力分析图Fig.10 Force analysis of the exoskeleton rocker
根据理论力学静力学公式分析方法可知,系统总力矩为零,即
∑M=0
(2)
由图10中受力分析可得
M=Fd
(3)
代入数值计算得到F为20 N。
2.2 外骨骼指节可伸缩结构设计原理与分析
由于需要适应不同尺寸的手指,并且手指弯曲时指节之间的长度会发生变化,所以在外骨骼指节内设计两个滑孔用于滑动铰链。如图11所示,圆柱状悬臂通过与外骨骼摆杆的内槽壁相切配合,可以自由在槽口内滑动旋转,进一步传递舵机的机械能。舵机固定螺纹孔将舵机安装后避免舵机因环境震动因素而错位。滑杆可在双滑孔内自由进行滑动。手指固定环的配合孔与手指固定环为过盈配合。
如图12所示,将各个外骨骼指节与铰链装配后,3个铰链错位放置,避免互相干涉影响运动,可以有效地完成手指外骨骼指节间可自由变化长度的功能。
如图13所示,当手指穿戴上外骨骼后,外骨骼受到来自手指本身现有状态下的支持力F,方向竖直向上。来自舵机通过外骨骼摆杆传递而来的F′与外骨骼摆杆所受的F共同组成一对作用力与反作用力,因此F在平衡状态的值为20 N。在该外骨骼指节静力学系统中,仅受到两个力矩的作用。根据理论力学静力学分析可知,在保持平衡状态下的物体合外力与合外力矩相等,若手指提供的支持力大于或等于舵机传动而来的压力,则手指外骨骼将无法带动外骨骼指节进行弯曲运动,即在初始力矩较小的情况下系统将会保持静止状态。
由于铰链可在外骨骼指节内的滑孔自由滑动,在舵机带动摆杆进行运动时,由摆杆传递F′到圆柱状悬臂,将F′分解为竖直向下及水平向右的两个分力,此时若F′竖直向下的力大于F,外骨骼指节实现以铰链为圆心的顺时针转动;同时F′的水平向右的力使外骨骼指节沿水平方向做直线运动。这两个运动轨迹的合成共同构成了外骨骼指节的实际运动。

1为圆柱状悬臂;2为舵机固定螺纹孔;3为双滑孔;4为手指固定环的配合孔图11 外骨骼指节结构Fig.11 The structure of the exoskeleton knuckle
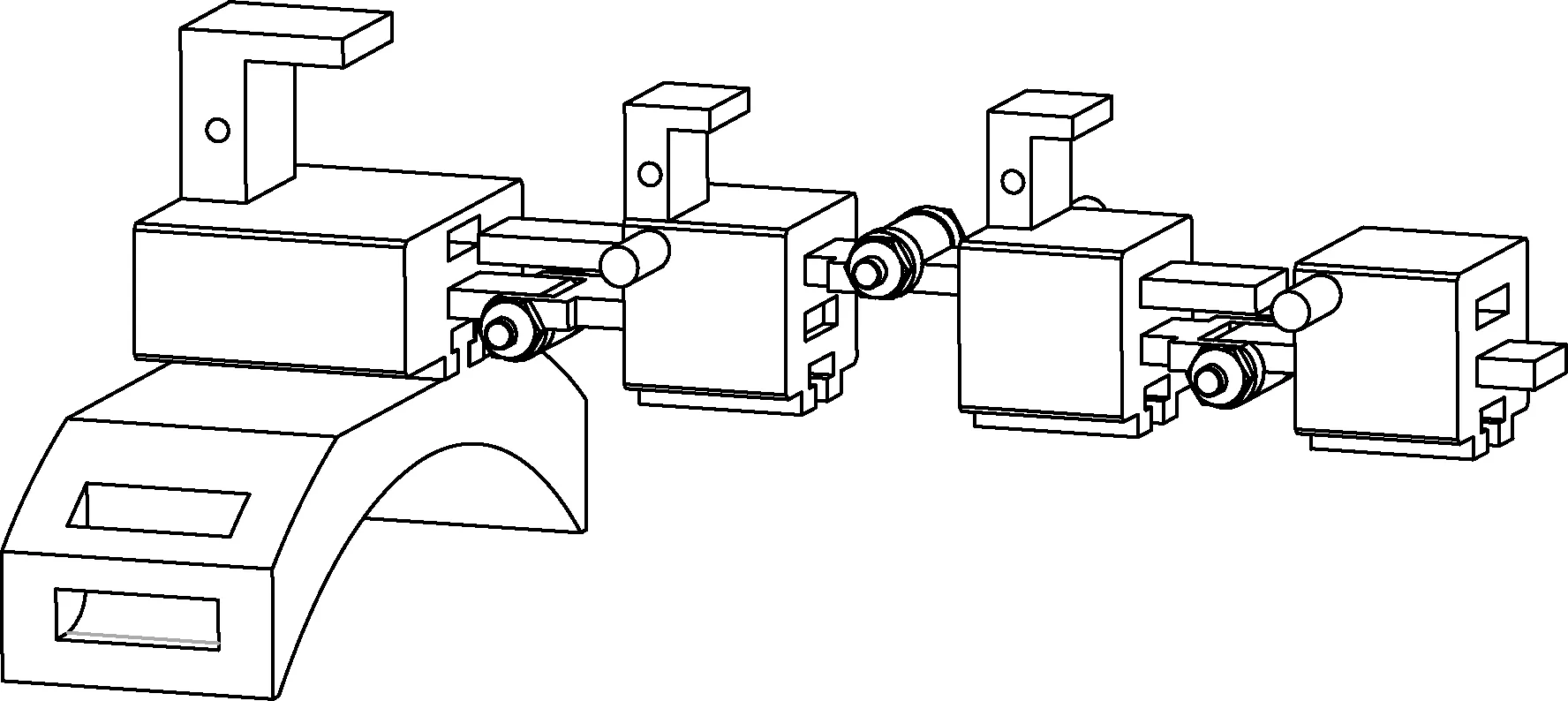
图12 外骨骼指节可伸缩机械结构Fig.12 The structure of the scalable mechanism
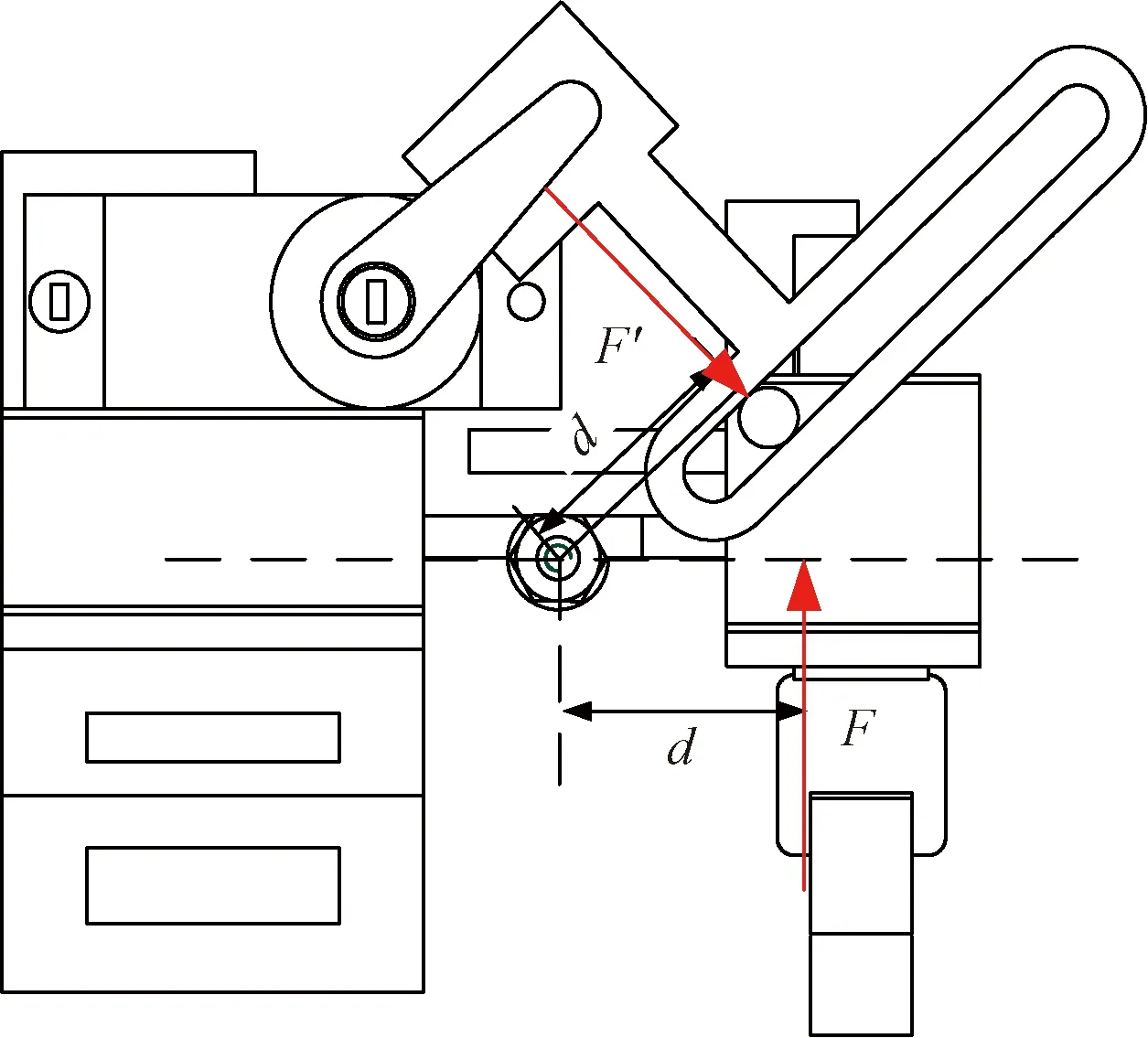
图13 外骨骼指节受力分析示意图Fig.13 Force analysis of the exoskeleton knuckle
2.3 手指固定结构设计原理与分析
如果使用圆环状的指环套入手指指节中间,每根手指3个指节的大小是递减的,根据手指各指节相应的横截面参数进行设计特定的圆环,这样的方案将会导致不同人群都要定制特殊尺寸的圆环,因此该方案不可行。于是考虑采用魔术贴来适应指节尺寸的变化。设计方案为使用魔术贴配合机械零件共同组成一个指环,魔术贴通过针线缝合,可以很容易调节指环的大小,并且魔术贴具有材质柔软、弯曲性能与韧性强、耐用的特点,很适合作为手指固定指环的组成材料。图14所示为指环的设计示意图,其中手指固定架的上端工字形结构设计用于与外骨骼指节配合。

1为手指固定架;2为魔术贴图14 外骨骼指环结构Fig.14 The structure of the exoskeleton ring
3 手指外骨骼机器人整体机械结构
图15所示为手指外骨骼机器人整体结构图。外骨骼电子控制系统通过控制该机械机构执行运动,每个关节的弯曲或伸展运动均可同时进行,帮助患者实现受伤手指的康复训练。根据普通人手指指长在6~10 cm,指宽在1.5~3 cm合理设计各零件尺寸。在该机械结构中,3个魔术贴指环可以方便快捷地将手指进行固定,3个外骨骼指节的尺寸与人体指节尺寸相当,其中使用3个舵机通过连杆将扭力直接传递到手指上,避免了多级传动过程中的能量损耗,并且该手指外骨骼整体结构紧凑,占用空间不大,在日常不使用时便于收纳。手指外骨骼机器人的主要机械原件使用3D打印的方法加工,加工过程绿色、环保,所加工的零件精度高,成本低。
所设计的手指外骨骼可以适应不同人群和不同手指长度。由于同一手掌上的食指与中指的总长度一般是不相同的,而且每个对应指节长度也均有不同,为了验证设计的合理性进行了穿戴实验。选择右手的食指和中指进行手指外骨骼机器人的穿戴实验。穿戴实验结果如图16所示,可以明显地看到,外骨骼机器人与手指契合度高,没有零件间的干涉影响。
除了验证穿戴功能外,还需要验证手指外骨骼在电子控制驱动下手指弯曲的效果,通过控制电机,观察到手指外骨骼可以完成带动手指弯曲与伸直的功能,符合预期的效果,具有帮助患者进行康复训练的能力。由图17看出,在弯曲到极限角度后,手指与外骨骼共同组成的结构稳定,无安全隐患。

图15 手指外骨骼整体结构Fig.15 The structure of the finger exoskeleton
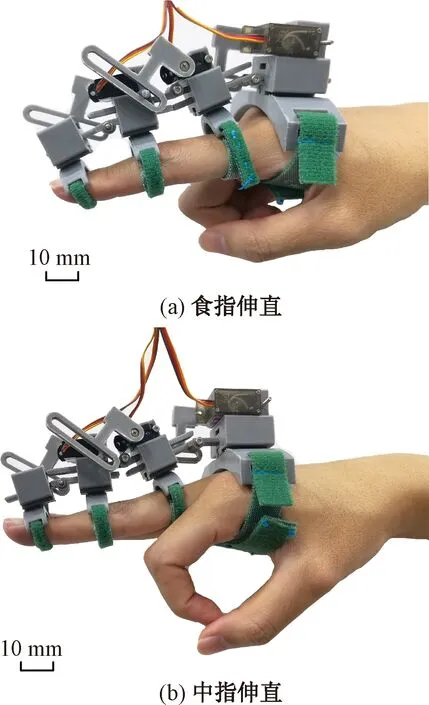
图16 食指与中指伸直穿戴效果图Fig.16 Application effects of the straight forefinger and the straight middle finger
4 实验分析
通过样机的佩戴实验,测量各个关节的运动角度,如表1所示,除MP部分与预计运动角度有偏差外,PIP及DIP部分均可满足预期运动角度,可满足康复运动的角度要求;如图18所示,在抓握实验中,可以正常满足生活中大部分场景的运动要求,如抓握水杯、抓握水果等。
由于中指部分掌背舵机固定架与掌背固定架位置相对固定,因此在外骨骼运动时,出现中指的MP部分角度相对较小的现象,后续工作会对掌背舵机固定架与掌背固定架进行结构改进。
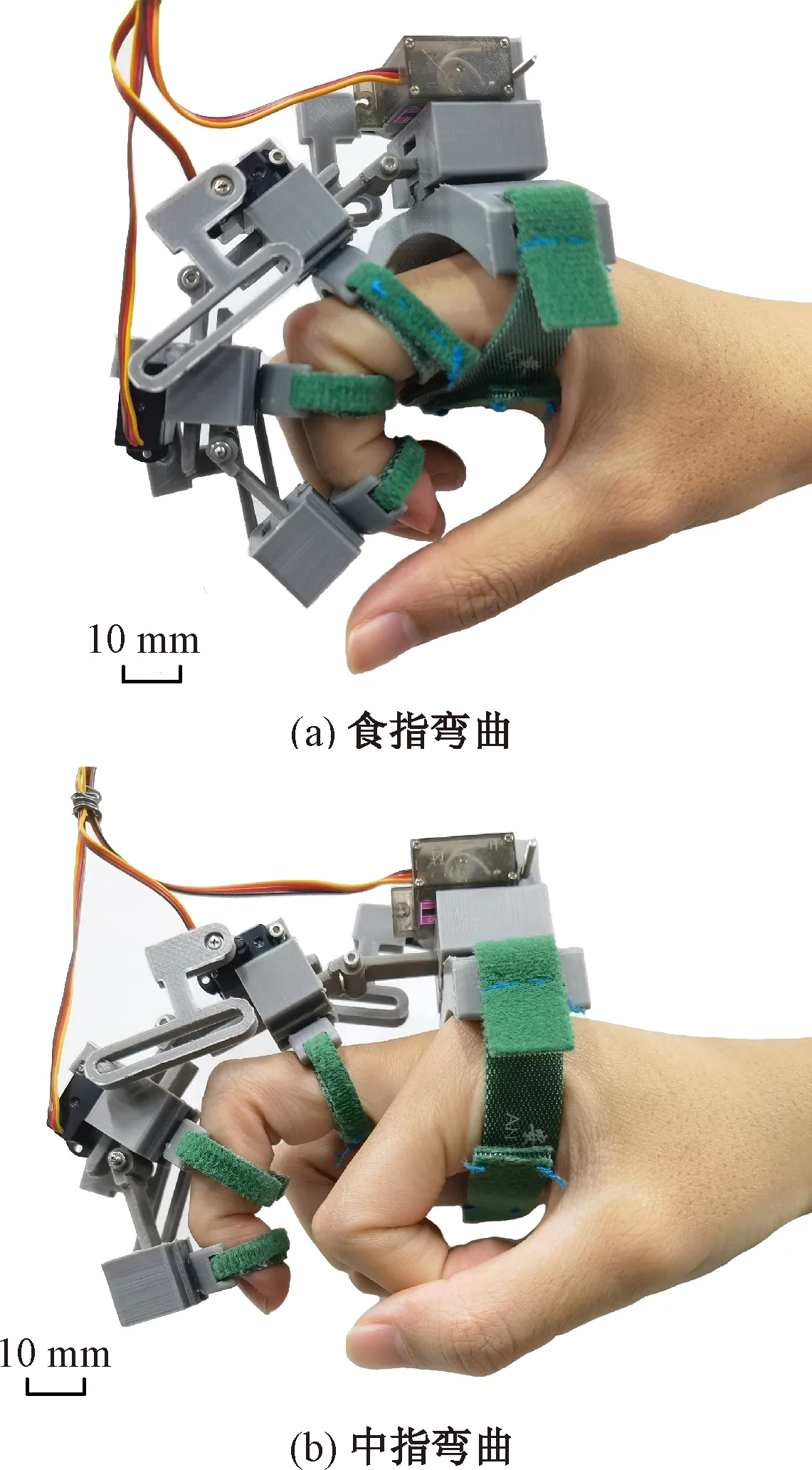
图17 食指与中指弯曲穿戴效果图Fig.17 Application effects of the bent forefinger and the bent middle finger

表1 手部外骨骼运动角度表Table 1 Angle of exoskeleton movement of hand
5 结论
为了实现对手指的康复训练,从简单的双摇杆机构出发对手指外骨骼进行设计。3个双摇杆机构的组合能够满足手指三自由度的康复训练需求。考虑到手指外骨骼的广泛适用性,将双摇杆机构组合的定长连杆改用被动滑动模块,解决了不同尺寸手指都能舒适佩戴的问题。手指外骨骼采用3D打印制作,该制作过程绿色、环保、成本低,并且3D打印材料质量轻,不会对手指造成过重负担。最后通过样机的佩戴实验验证了所设计的手指外骨骼与手指的运动配合度高,为后续的康复实验奠定了基础。下一步研究工作将围绕手指外骨骼的控制系统进行。

图18 手部外骨骼抓握实验图Fig.18 Hand exoskeleton grasping experiment
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
机械科学与技术(2022年8期)2022-08-30
时代汽车(2021年11期)2021-08-04
汽车零部件(2021年1期)2021-02-02
中阿科技论坛(中英阿文)(2020年2期)2020-05-27
轻兵器(2019年5期)2019-06-21
现代兵器(2017年4期)2017-06-02
世界博览(2017年1期)2017-04-19
科技视界(2016年27期)2017-03-14
大众健康(2016年3期)2016-05-31
