
基于聚合型涡旋电磁波束的三维SAR 成像
2022-08-07 09:13国少卿何姿陈如山
电波科学学报 2022年3期
国少卿 何姿 陈如山
(南京理工大学电子工程与光电技术学院,南京 210094)
引 言
雷达探测技术通过发射和接收电磁波实现对目标区域的观测,由于电磁波能够穿透云雾且不受光照限制,因而能够实现全天候观测. 随着军事上对获取战场环境信息的更高需求,新体制雷达的研究和探索也在逐渐开展. 近年来,携带轨道角动量(orbital angular momentum, OAM)的涡旋电磁波引起了研究者的广泛关注[1-3]. 由于理论上OAM 的模式数具有无穷多个,并且各个模式之间具有正交性,因此利用OAM 的模式复用,能够在同一频段上同时传输多路信号,从而极大地提高信道容量[4-6].
另一方面,涡旋电磁波具有的特殊相位分布在雷达成像方面具有很高的应用价值. 2013 年,国防科技大学的郭桂蓉院士等人[7]首次研究了涡旋电磁波在雷达成像方面的应用. 随后刘康等人[8-10]利用圆环阵列在多模式涡旋电磁波的产生及高分辨成像方面做了许多研究工作,并通过实验对该理论进行了验证. 已有的研究表明,雷达发射携带OAM 的涡旋电磁波照射目标时,目标的散射场表现出与平面波照射时不同的特性[11-12],这一现象在隐身目标的探测方面具有一定的应用价值. 此外,考虑到目标的强散射点分布可能与平面波照射时有所不同,将各个模式的涡旋电磁波的回波信号进行成像处理,得到的图像有望反映出待测目标更丰富的信息,这一方面的工作有待深入研究.
实孔径成像的分辨率受到天线口径大小的限制,为解决这一问题,研究者将涡旋电磁波与合成孔径雷达(synthetic aperture radar, SAR)[13-16]结合,利用载体平台在方位向的运动合成大的虚拟孔径从而能够达到远超实孔径所能实现的方位高分辨[17-21]. 而在距离向可以通过发射宽带信号并通过脉冲压缩实现.方越等人[17]对传统的Chirp-Scaling 成像算法进行了改进,实现了对涡旋电磁波照射下的点目标的重构.杜永兴等人[18]利用改进的后向投影(back projection,BP)算法实现了多模式下的涡旋电磁波SAR 成像.刘康等人也在这方面做了相关的研究[19-20]. 但是由于涡旋电磁波束呈环状分布,随着传播距离的增大会逐渐发散,并且发散角随着模式的增大而变大. 目前文献报道的关于涡旋电磁波SAR 成像方面的研究都采用传统的环形波束,文献[19]对该问题进行研究发现在高模式时环形波束的中空特性导致方位向聚焦的旁瓣变高,影响成像结果.
2017 年,浙江大学的研究团队提出了一种平面OAM 波束的产生方法[22],利用开缝的环形谐振腔产生水平全向辐射的OAM 波束,随后该团队通过将能够产生不同模式的单元组成阵列,实现了波束在方位角维的聚合[23],其主瓣保持了涡旋电磁波的相位梯度特性,并且证明了组合后产生的聚合型涡旋电磁波各个模式之间仍然具有正交性,俯仰角维可通过加载喇叭天线实现窄波束. 本文将聚合型涡旋电磁波束应用于SAR 成像中,这种方案避免了波束中空对方位聚焦结果的影响,并能够利用涡旋电磁波的相位梯度特性. 本文首先介绍了聚合型涡旋电磁波束的基本理论,分析了模式个数与合成的波束宽度的关系,以及合成后的OAM 模式. 为了充分利用涡旋电磁波的相位梯度特性,通过合适的SAR 成像几何构型对BP 算法进行改进,利用多个模式实现对不同高度目标的重构,从而实现三维成像. 为了减少高分辨成像对模式数的需要,本文引入稀疏重构算法,利用目标在成像区域的稀疏性,实现以较少的模式数对场景的高分辨三维重构. 最后通过仿真结果验证了本文方法的有效性.
1 聚合型涡旋电磁波束
文献[22]中提出了一种利用侧面开缝的环形谐振腔产生平面涡旋电磁波束的方案,其最大辐射方向指向水平方向且在方位具有全向性,如图1 所示.
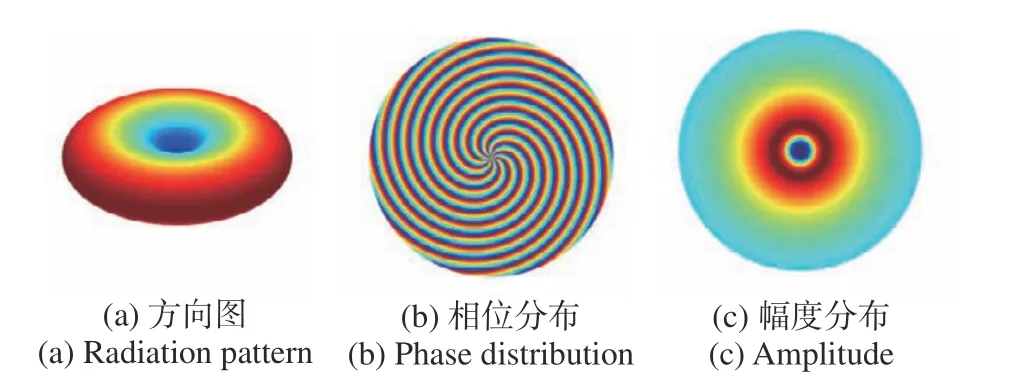
图1 平面涡旋电磁波[22]Fig. 1 Plane spiral OAM wave[22]
文献[23]中给出了利用多个模式的平面涡旋波束实现波束聚合的原理:考虑由N个单元组成的阵列,每个单元产生一个模式,记第一个单元模式为l0,第n个单元模式为l0+(n-1)Δl,Δl表示相邻两个单元的模式数之差. 例如,当l0=1,N=8,Δl=1 时,表示8 个单元产生的模式分别为l∈{1,2,3,4,5,6,7,8}. 根据涡旋电磁波的相位分布特性,在方位角 φ处极化方向为p的 电场具有如E(φ)=pAe-jlφ的形式. 与平面波相比,涡旋电磁波增加了涡旋相位项,可以看作是沿不同方向平面波的叠加[7],因此本文第2 节中仍采用理想点模型构造回波. 假设各模式的幅值A相同,为便于推导假设A=1,则组成阵列后N个模式的涡旋电磁波叠加后随方位角的变化具有如下形式:


下面基于式(1)给出不同模式组合结果中远场的归一化幅值和相位随方位角变化的结果,三组模式 组 合 分 别 为lG1∈{1,2,3,4,5,6,7} ,lG2∈{4,5,6,7,8,9,10},lG3∈{7,8,9,10,11,12,13},模 式 个 数 均 为7个,间隔均为1,如图2 所示.
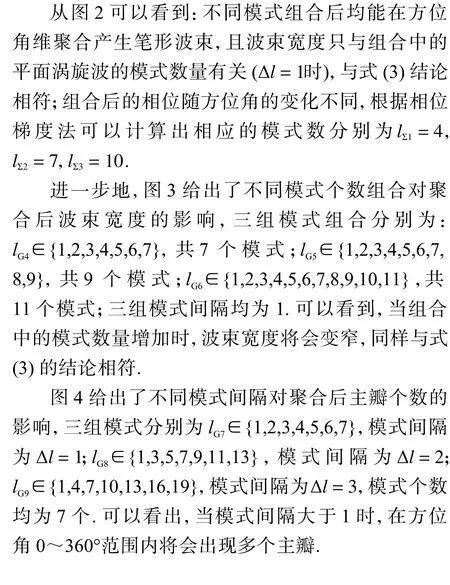

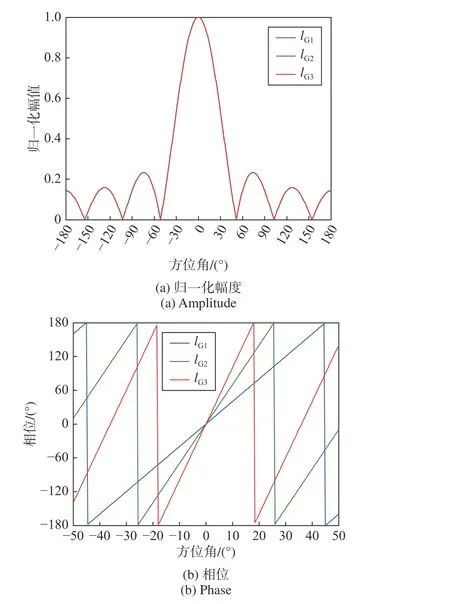
图2 不同模式组合后幅度、相位随方位角的变化Fig. 2 Amplitude and phase distribution for different OAM mode group
图3 不同模式数量对波束宽度的影响Fig. 3 Focused beam width for different number of OAM mode

图4 模式间隔对聚合后主瓣个数的影响Fig. 4 Different number of main lobes for different modeinterval
2 三维成像原理
2.1 回波信号模型
传统的二维SAR 成像得到的图像中的距离向信息实际上反映的是雷达到目标的斜距,而对于复杂的城市及山区等场景,可能存在不同高度的散射点到雷达距离相同的情况. 此时经过成像算法处理后这些散射点位于同一距离单元内,从而形成混叠. 为解决这一问题,研究者在三维SAR 成像方面做了许多研究工作,具有代表性的如层析SAR 技术[1,16]. 层析SAR 成像的思路是通过平台在距离向的法向分布多个基线进行观测,从而形成一定的虚拟孔径,实现对不同高度目标的分辨,由于需要平台在不同高度多次观测,因此难以实现对观测区域的实时成像.
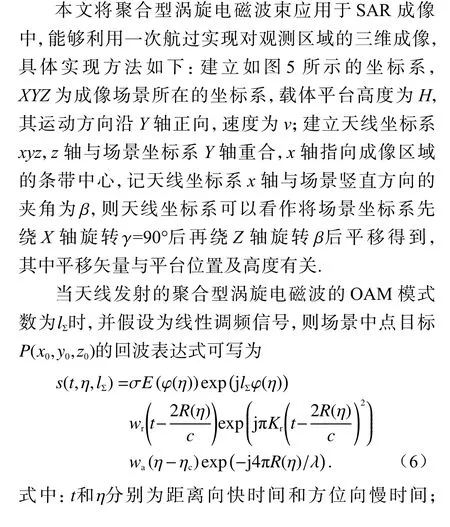
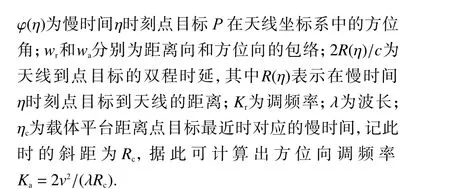
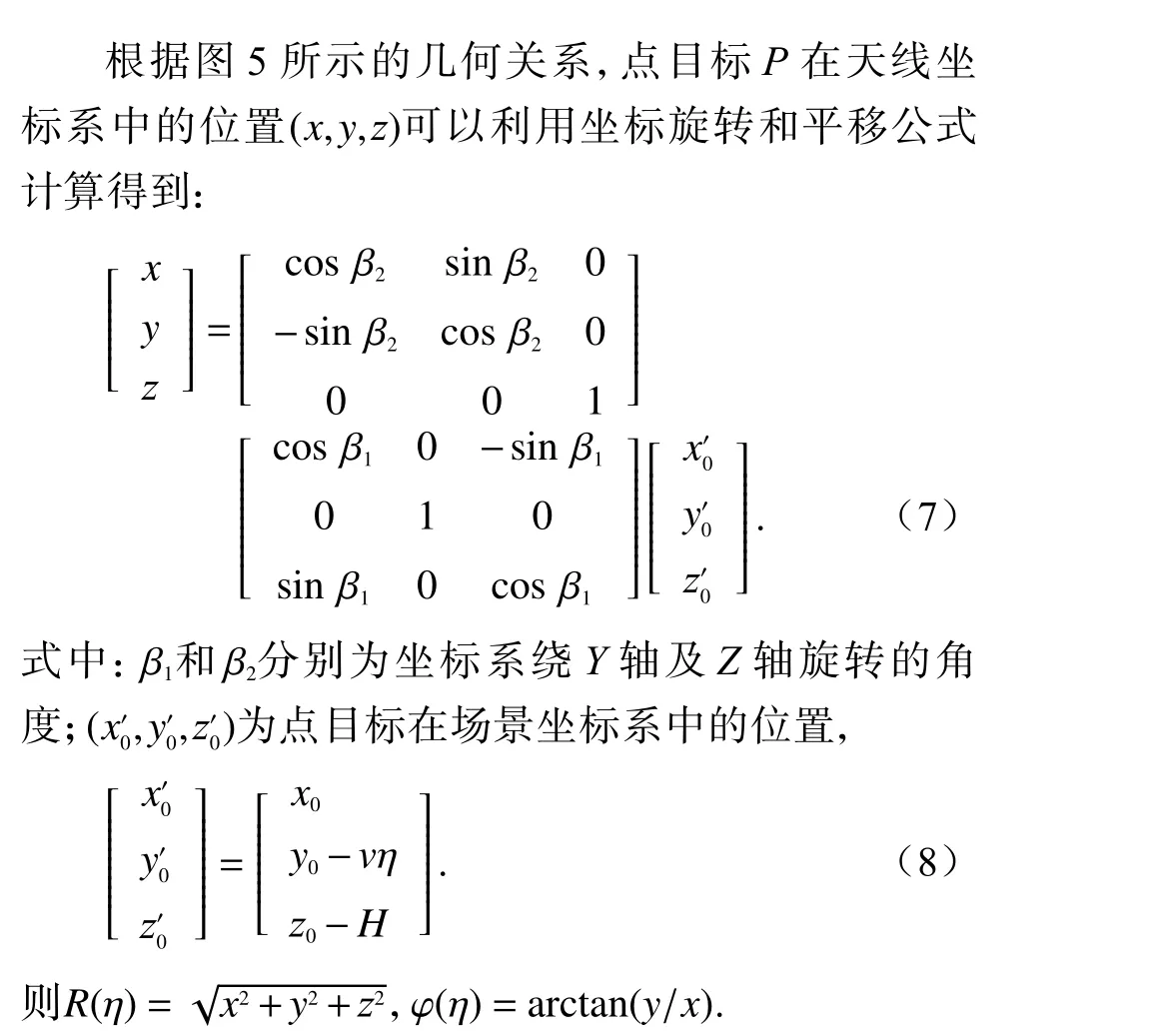

图5 三维SAR 成像模型Fig. 5 Diagram of 3D SAR imaging
2.2 高度向分辨率分析
与传统平面波成像的回波信号相比,式(1)中涡旋电磁波增加了涡旋相位调制项,其中涡旋相位与模式数有关,并且与点目标在天线坐标系中的方位角构成对偶关系. 理论上利用多个模式的涡旋电磁波能够反演出点目标在天线坐标系中的方位角,进而利用几何关系得到其在成像场景中的高度信息.
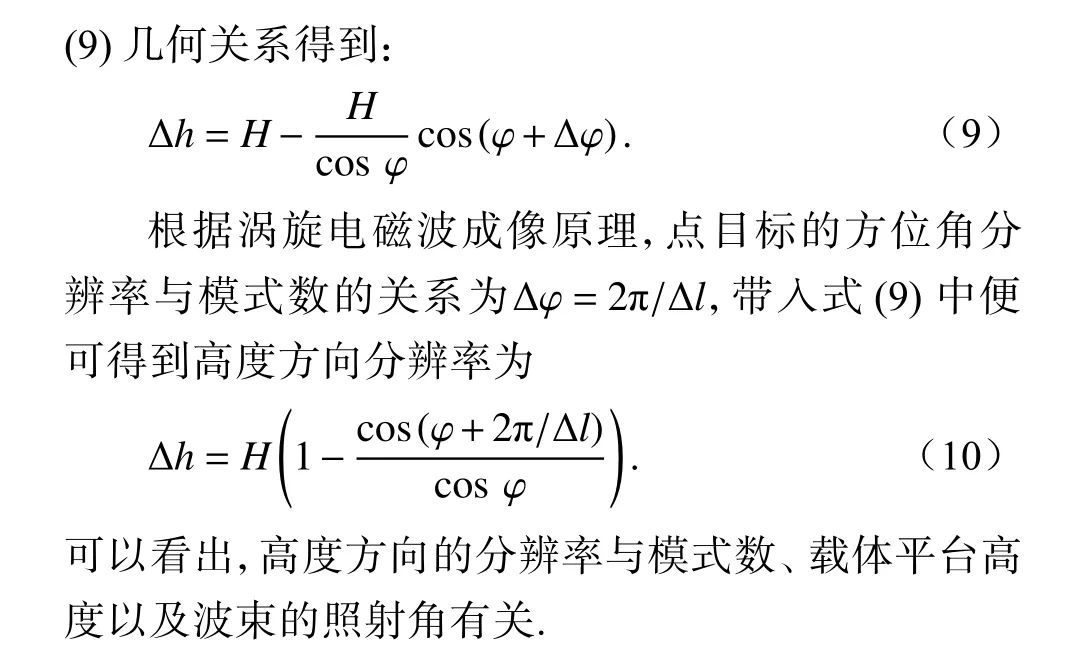
高度方向的分辨率可以按照如下方法得到:如图6 所示,假设与天线距离相同的两个邻近的点目标A和A′刚好能被分离开时,在天线坐标系中的方位角分别为 φ 和 φ+Δφ,此时它们的高度差可以根据式

图6 高度向分辨率分析Fig. 6 Resolution of the height direction
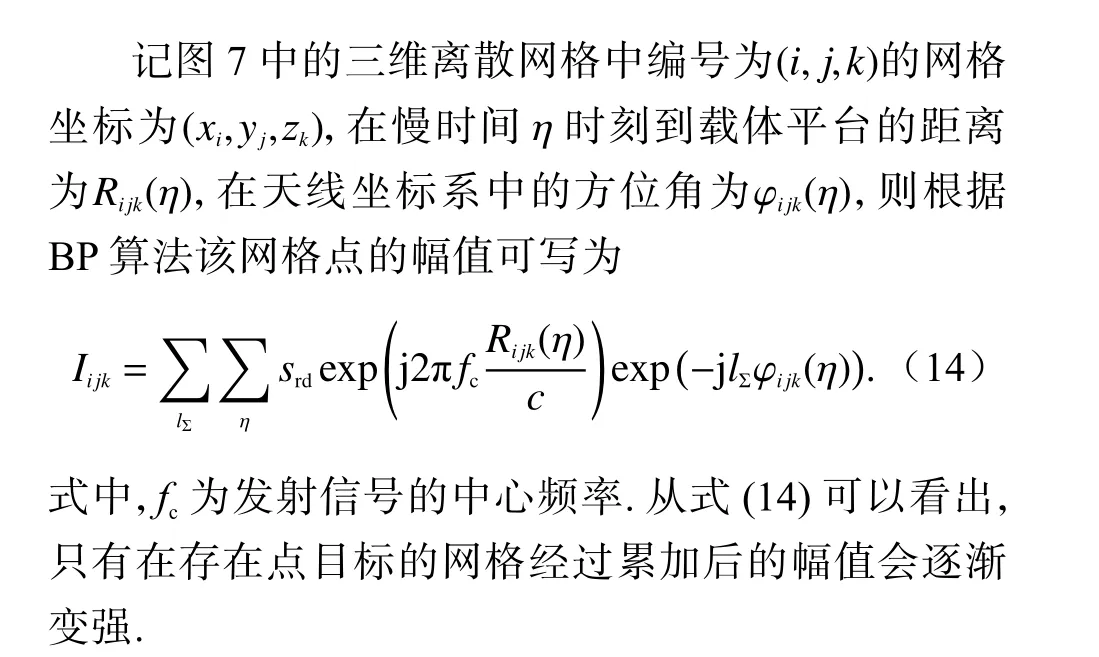
2.3 三维BP 成像算法
BP 算法是一种经典的时域成像算法,其基本原理是通过计算平台在不同方位时刻到成像区域内各个网格点的双程延时,然后遍历各个网格点执行相干累加操作,最终得到各个网格点的散射强度值. 从BP 算法的原理可以看出,这种方法与平台的运动轨迹无关,因此理论上适用于各种成像模式.
本节利用三维BP 算法实现对待测区域的三维成像. 三维BP 算法的思路与二维BP 算法原理类似,不同之处在于,三维BP 算法需要对成像区域进行三维网格划分,如图7 所示.

图7 成像区域三维网格划分Fig. 7 Three dimensional mesh grid
三维BP 算法具体实现步骤如下:
首先对回波信号做距离向快速傅里叶变换 (fast Fourier transform, FFT),得到


2.4 三维稀疏重构算法
利用上述改进后的三维BP 算法能够准确重构出目标在成像区域中的位置,但是为了达到较高的高度向分辨率,一般需要产生很高的模式. 考虑到在高频时目标的强散射中心在成像场景中通常具有稀疏性,因此可以利用稀疏重构算法,以较少的模式实现高分辨. 对于回波表达式(6),假设在快时间和慢时间的采样点数分别为Nt和Ne,则回波经过采样后可以看作为一个Nt×Ne的二维矩阵,矩阵的每一个元素,均为相应的采样点处所有点目标回波的累加,即

式中,a,b及m分别为快时间、慢时间及模式域的采样点序号.
利用稀疏重构算法成像时,同样需要首先对成像区域进行三维网格划分,假设成像区域划分的三维网格总数为Q,所用的M个OAM 模式数记为lΣ1~lΣM,则可根据式(6)和式(15)构造字典矩阵并建立回波信号的稀疏表示方程如下:


3 算例仿真
下面首先利用三维BP 算法仿真一个点目标在聚合型涡旋电磁波照射下的成像结果. 成像场景在距离(X)、方位(Y)、高度(Z) 的离散区域分别为X∈[1 000,1 200] m,Y∈[-10,10] m,Z∈[0,400] m,点目标位置为P(1 020,0,0) m,用于组合产生各个聚合型涡旋电磁波束的平面涡旋波数量均为N=5,其他参数如表1 所示.
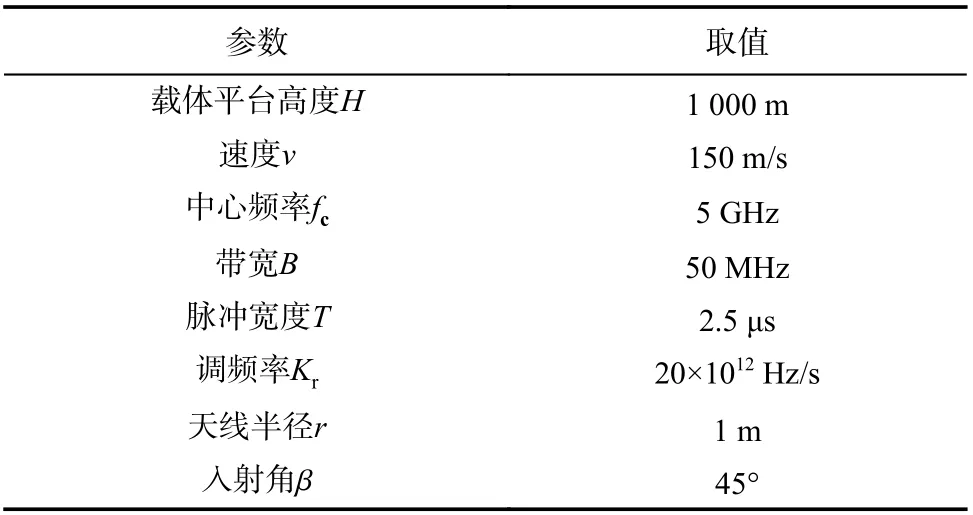
表1 仿真参数Tab. 1 Simulation parameters
图8(a) 给出了lΣ∈{1, 2, 3, ···, 60}的成像结果,可以看到,利用多模式聚合型涡旋电磁波能够正确地重构出点目标的位置;作为对比,图8(b)还给出了利用单个模式的涡旋电磁波的成像结果. 可以看到,只用1 个模式时,在不同的高度出现了多个虚假点,这是由于利用单一模式无法区分与雷达距离相同、高度不同的目标. 结合图6 可以看到,与雷达距离相同的点在距离向上的位置分布不同,高度较高的点相应的距离较远,与图8(b)的成像结果相符.
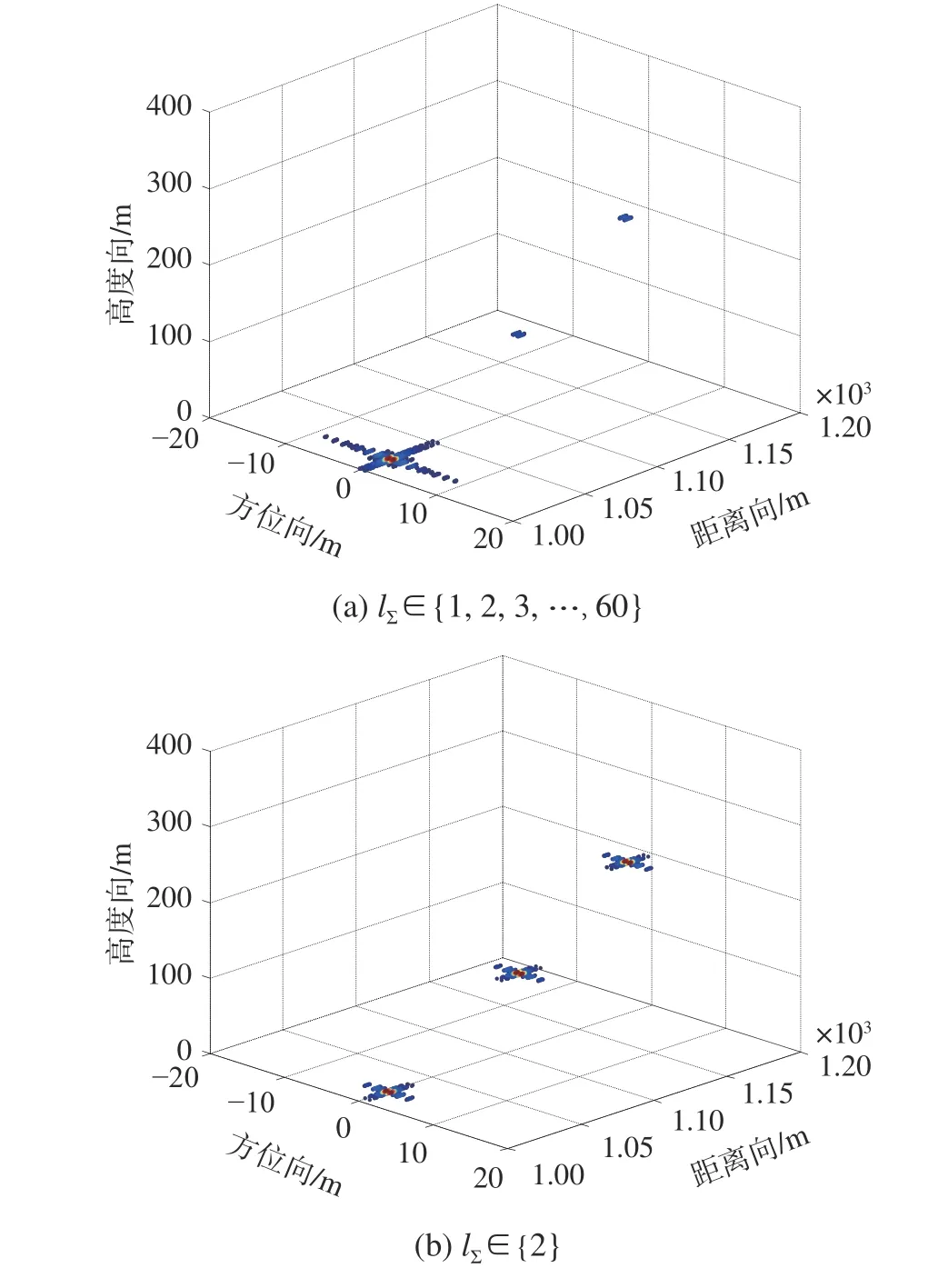
图8 单个点目标成像结果Fig. 8 Imaging results of single point
图9 给出了利用表1 中的参数仿真得到的位于不同高度的两个点目标的成像结果,其位置分别为P1(1 020,0,0) m 和P2(1 150,0,300) m,所 用 模 式为lΣ∈{1, 2, 3, ···, 60}. 可以看出,两个点目标的位置与实际位置一致,从而证明了本文中改进后的BP 成像算法能够对不同高度的目标进行重构,实现三维成像.
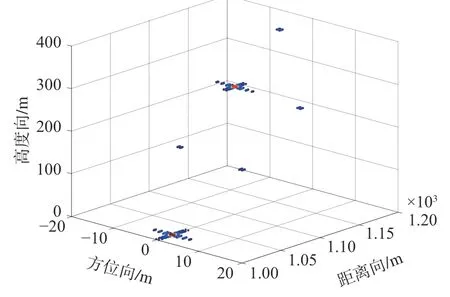
图9 两个点目标成像结果Fig. 9 Imaging result of two points
为验证稀疏重构算法的有效性,下面仿真了两个高度相差50 m 的点目标,其位置分别为P1(1 020,0,0) m 和P2(1 100,0,50) m,所 用 模 式 为lΣ∈{1, 2,3, ···, 10},成像结果如图10 所示. 可以看到,两个点目标的重构结果与实际位置一致,因此利用稀疏重构算法能够利用较少的模式实现更高的分辨率.
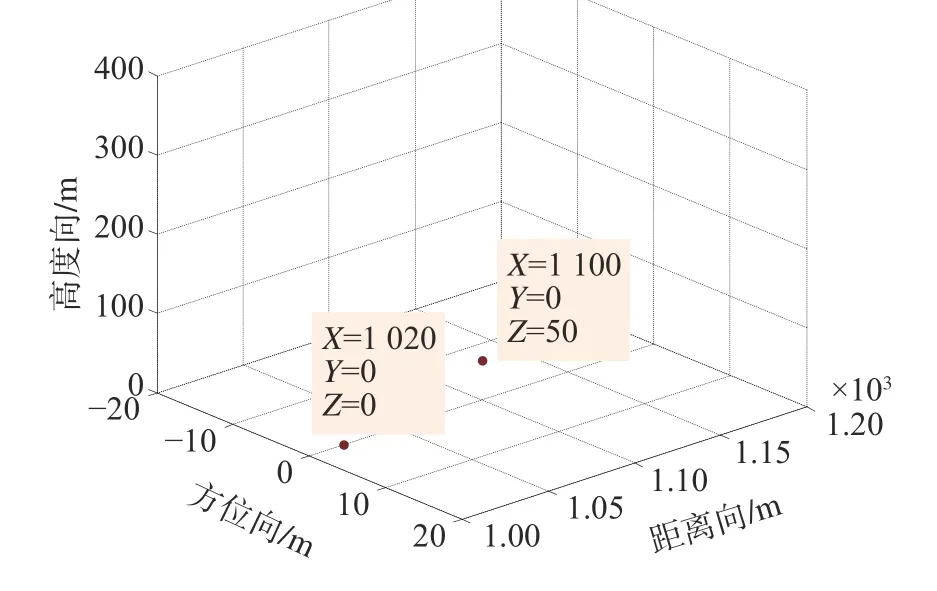
图10 稀疏重构算法得到的两个点目标成像结果Fig. 10 Imaging result of two point by sparse recovery method
下面利用稀疏重构算法仿真12 个分布在不同高度的点目标,其具体位置在表2 中给出,所用模式为lΣ∈{1, 2, 3, ···, 10},成像结果如图11 所示. 可以看到,这12 个点目标的重构结果与实际位置一致,因此可以证明利用稀疏重构算法能够用较少的模式实现高分辨.

图11 稀疏重构算法得到的12 个点目标成像结果Fig. 11 Imaging result of 12 points by sparse recovery method

表2 12 个点目标位置Tab. 2 locations of the 12 points
4 结 论
本文将聚合型涡旋电磁波束与合成孔径雷达技术结合,以实现三维成像. 仿真结果证明了多模式聚合型涡旋电磁波能够实现对成像区域的三维重构.利用目标在成像区域的稀疏性,结合稀疏重构算法,能够以较少模式实现高分辨成像. 本文方法与传统的三维SAR 成像系统如层析SAR 相比,其优点在于不需要在不同高度对场景进行多次观测,只需一次航过即可实现三维成像,有利于实时成像. 其缺点是由于需要多个模式进行观测并获取回波,要求系统能够实现多个模式的切换,增加了系统的复杂程度.需要指出的是,由于受研究条件限制,本文只给出了理想点目标的仿真结果,对真实复杂场景的三维重构将是下一步的研究方向.
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
空间科学学报(2021年6期)2021-03-09
流体机械(2021年12期)2021-02-16
成都信息工程大学学报(2021年6期)2021-02-12
海洋通报(2020年2期)2020-09-04
舰船科学技术(2020年3期)2020-04-22
通信技术(2019年3期)2019-05-31
中央民族大学学报(自然科学版)(2018年1期)2018-06-27
