工业机器人工件坐标系激光标定研究分析*
2022-08-09 08:14沈涛,王强,郭超
南方农机 2022年15期
沈 涛 , 王 强 , 郭 超
(宜宾职业技术学院智能制造学院,四川 宜宾 644000)
1 工业机器人工件坐标系标定简介
工业机器人控制系统拥有基坐标系、工件坐标系、工具坐标系[1]。按照不同的加工产品特性,可选择适合产品的坐标系进行产品轨迹规划,合适的坐标系对工业机器人加工产品的运行轨迹有巨大的帮助[2]。在应用工业机器人坐标系时,因加工产品夹紧位置各不相同、加工的工具形式多样,所以工具坐标系和工件坐标系的原点位置均不同,由此工业机器人坐标系的标定就显得尤为重要。本文针对工业机器人工件坐标系的标定进行分析研究[3]。
在工业机器人系统中,工件由于安装的位置不同,其坐标系原点位置也不尽相同。由于工业机器人基坐标系原点固定不变,因此可将其作为参考点明确工件坐标系的原点位置,从而可将工件建立在工件坐标系中进行工业机器人轨迹规划。工业机器人坐标系间的相互关系和位置如图1所示。

图1 工业机器人坐标系示意图
目前,工业机器人工件坐标系标定主要分为接触式标定和非接触式标定两种,本文中的工件坐标系激光标定是一种典型的非接触式标定[4]。
2 工件坐标系标定原理分析
在工业机器人运行轨迹规划过程中,工件坐标系标定是最常用的坐标系标定之一,工件坐标系是建立在以加工对象即工件为坐标系原点上的坐标系。以工件表面任一点作为加工坐标系原点,有利于在工件形状或工件摆放位置不规则的情况下,工业机器人末端执行器能够顺利地进行轨迹规划,避免工业机器人在轨迹运行的过程中出现奇点现象。
工件坐标系标定是为寻找工件位置与基坐标系之间的相对位置关系[5]。其计算方式可通过矩阵转换实现。若矩阵变换用bTf表示,取工件坐标系中任意点p,则其在工件坐标系中的位置为:

在基坐标系中的位置:

其中,该点在基坐标系中的位置b p可以测量得出,并已知其在工件坐标系中的位置f P,因此只需列出三个等式(采集三点位置)即可列出bTf矩阵[1],而激光标定方式为常见的非接触式获取以上工件任意点位置坐标的手段。
3 工业机器人激光标定
由第二节可知,工业机器人激光标定的关键在于明确工件标定点p在工件坐标系中的位置f P和在基坐标系中的位置b p的坐标值。本研究中,将激光发射器安装于工业机器人末端执行器上,激光发射器可随工业机器人姿态的变化而改变位置,可发射集束红外线光源。集束红外线光源投射到工件表面后会在其表面反射光线,由安装在激光发射器部位的高精传感器接收并产生电压信号反馈至工业机器人总控系统,从而明确工件在工业机器人中的位置。
在本标定中,激光发射器固定在工业机器人末端执行器上,因此,激光发射器的坐标位置与工业机器人工具坐标系的位置相对固定,其随工业机器人位姿的改变而改变,反馈的集束光因激光发射器的位置改变而转化的电压信号不同,由不同的电压信号可确定激光发射器与工件的相对位置[6]。激光发射器在工业机器人工具坐标系的相对位置可用下式表示:

式中,xOE、yOE、zOE是激光发射器在工业机器人工具坐标系中的位置,即集束光源坐标值;mOE、nOE、pOE是激光发射器光源方向矢量,由于激光发射器位置相对不变,因此激光发射器光源方向矢量相同。因此,可通过正运动学分析获取工业机器人激光发射器在工业机器人基坐标系中的位置[7]:

其中:

激光发射器集束光源直线方程为:

式中,(x,y,z)为激光发射器集束光源通过工业机器人基坐标系中固定点的坐标值,(α,β,γ)为激光发射器集束光通过工业机器人基坐标系中固定点的方向矢量[6]。
工业机器人通过改变其末端执行器位姿并获得激光发射器反馈集束光线,可得到工业机器人在这两种情况下的关节角,并且利用正运动方程获取激光发射器集束光源的变换矩阵,进而获得激光发射器集束光源在工件标定点上的坐标值。
两次集束光的交点列式为:

其中:

在求解的过程中,有可能两次集束光不存在交点,因此,在没有交点时可以用两次集束光的公垂线中心点求取近似交点。
公垂线中心点:

其中:

工业机器人激光标定前,由于其末端执行器运行误差的原因,激光点交点不一定在同一个点上,但激光标定后激光交点则可收敛为同一个交点,减小了由于工业机器人运行误差所产生的偏差。激光交点收敛图如图2所示。
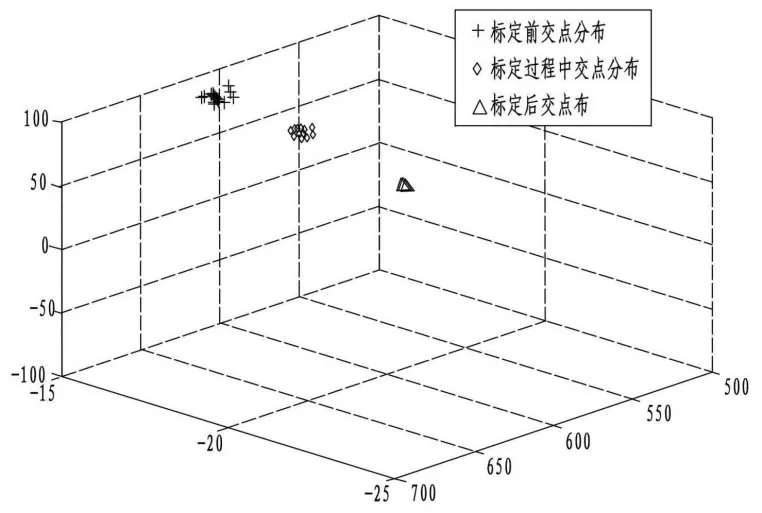
图2 激光交点收敛图
4 工业机器人激光标定实验设计
当得到激光发射器在不同位置的坐标值后,只需知道工业机器人激光发射器发射的集束光在不同位置的交点即可计算出工件坐标系在工业机器人基坐标系中的相对位置,因此需计算出两次集束光公垂线中心点的坐标值。实验设计如下。
1)将工业机器人末端执行器变换至任意位置至少2次,使高精传感器均能接受到集束光从工件同一位置上的反射光线并分别记录其角度值;
2)更换工件标定点位置,重复第一步操作,工件标定点建议选取3个及其以上;
3)将获取的角度值代入激光直线方程中,计算并得到激光发射器在工业机器人基坐标系中的坐标值,从而获取工件标定点在工业机器人基坐标系中的变换,即可得到工业机器人工件坐标在工业机器人基坐标中的相对位置关系,即工件坐标系[7-10]。
5 总结
本文主要介绍了采用激光标定的方式标定工业机器人工件坐标系的计算方法,对其理论计算展开了详细分析,对在工件标定过程中激光交点不在同一个点上的问题提出了解决方案,并设计出了工业机器人激光标定实验的设计思路,为工业机器人工件坐标系标定的理论研究提供了思路。
猜你喜欢
绿色科技(2022年20期)2022-11-17
兵器知识(2020年11期)2020-11-18
学生导报·东方少年(2019年7期)2019-06-11
兵器知识(2019年1期)2019-01-23
农业与技术(2018年18期)2018-12-18
汽车维护与修理(2018年3期)2018-12-07
小猕猴智力画刊(2018年7期)2018-08-08
数学学习与研究(2017年11期)2017-06-20
青年时代(2017年3期)2017-02-17
理科考试研究·高中(2014年3期)2014-04-10